
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
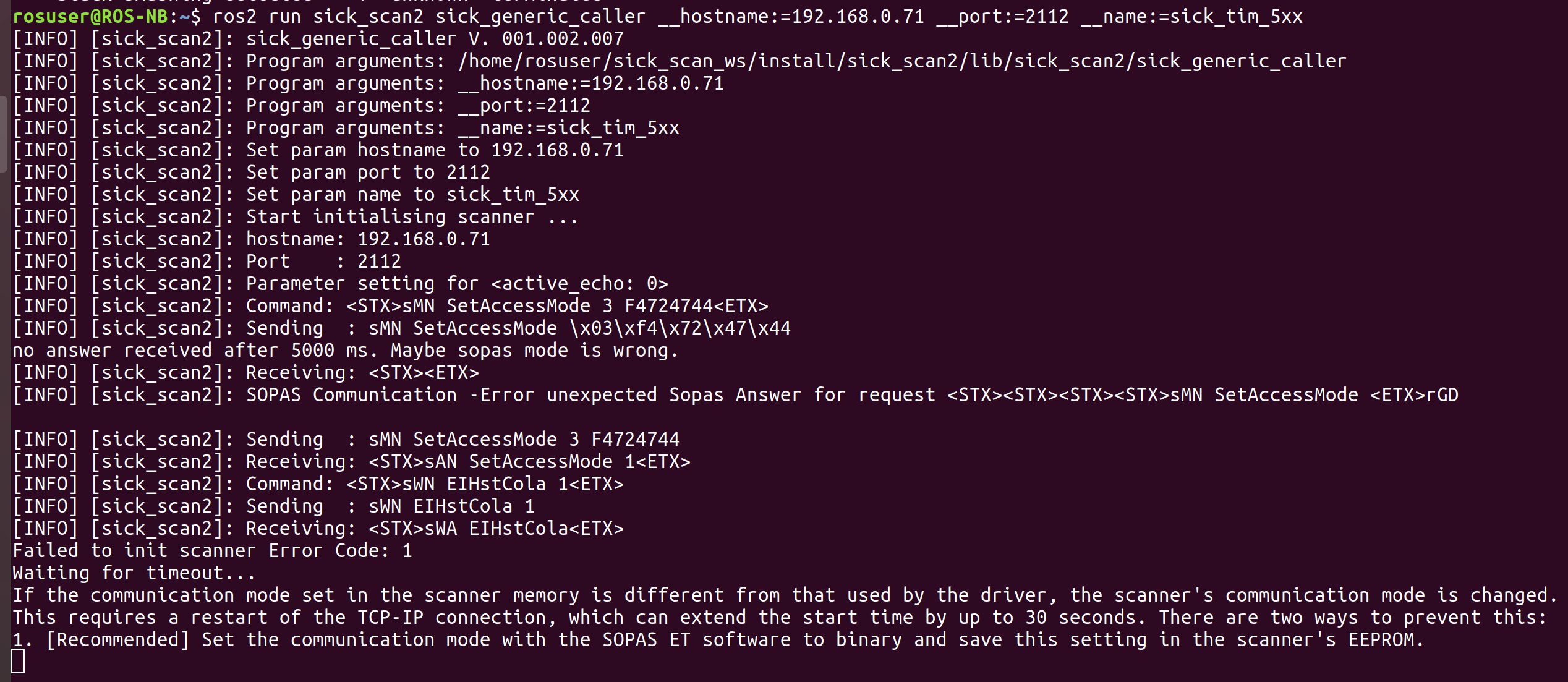
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
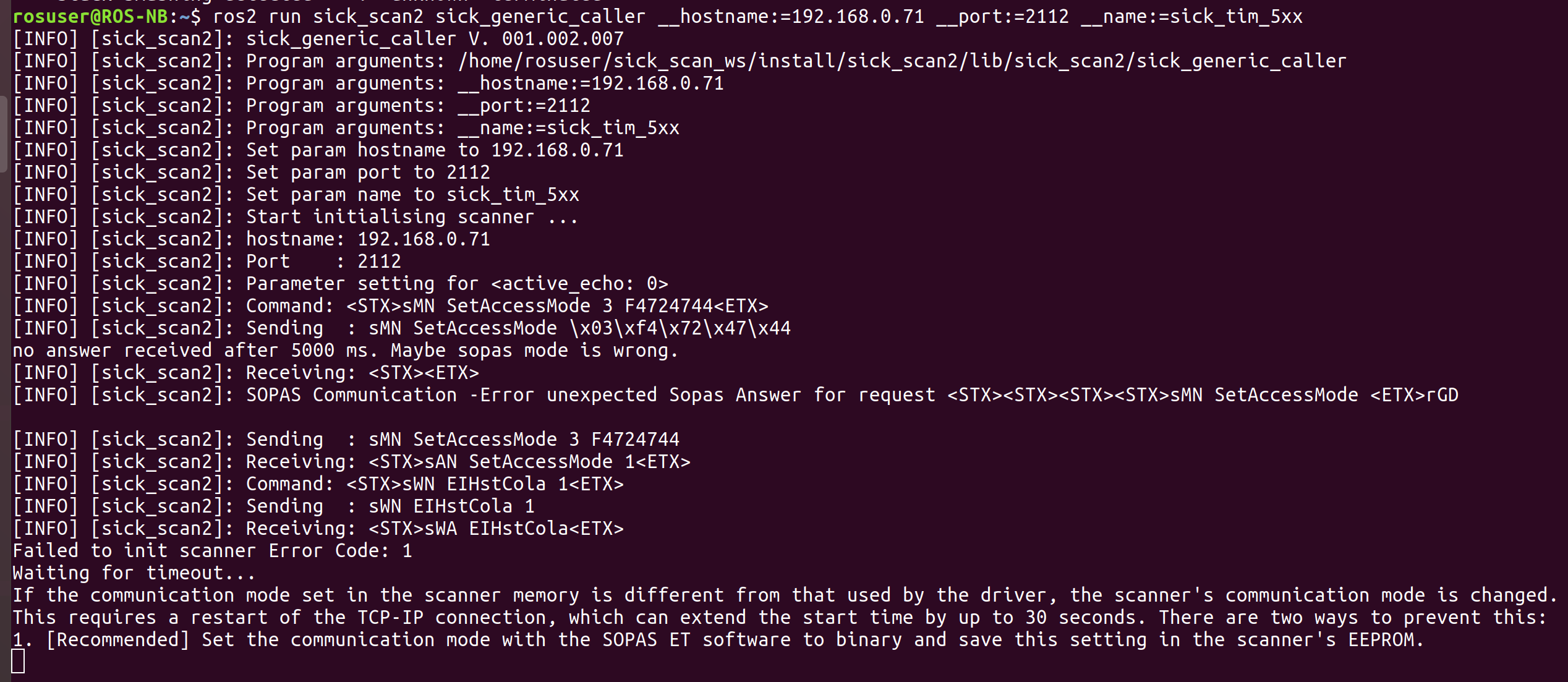
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | 0.1.4 |
| Last Updated | 2019-10-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
- Michael Lehning
- Jochen Sprickerhof
- Martin Günther
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Table of contents
This stack provides a ROS2 driver for the SICK TiM series of laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz |
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
-
List of own IP-addresses: ifconfig grep “inet addr” - Try to ping scanner ip address (used in launch file)
-
- If the driver stops during init phase please stop the driver with ctrl-c and restart (could be caused due to protocol ASCII/Binary cola-dialect).
Support
- In case of technical support please open a new issue. For optimal support, add the following information to your request:
- Scanner model name,
- Ros node startup log,
- Sopas file of your scanner configuration. The instructions at http://sickusablog.com/create-and-download-a-sopas-file/ show how to create the Sopas file.
- In case of application support please use https://supportportal.sick.com .
- Issue Handling: Issues, for which no reply was received from the questioner for more than 7 days, are closed by us because we assume that the user has solved the problem.
Installation
In the following instructions, replace <rosdistro> with the name of your ROS distro (e.g., dashing).
From source
```bash source /opt/ros/$ROS_DISTRO/setup.bash mkdir -p ~/sick_scan_ws/src/ cd ~/sick_scan_ws/src/
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| std_msgs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |
Dependant Packages
Launch files
Services
Plugins
Recent questions tagged sick_scan2 at Robotics Stack Exchange
|
|
sick_scan2 package from sick_scan2 reposick_scan2 |
ROS Distro
|
Package Summary
| Version | 0.1.9 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/SICKAG/sick_scan2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-09-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Michael Lehning
Authors
IMPORTANT: This repository will not be maintained further. The sources have been completely transferred to the repository https://github.com/SICKAG/sick_scan_xd. The repository will be deleted after 12/31/2022 in 2023 without further notice.
sick_scan2
This stack provides a ROS2 driver for the SICK lidar sensors mentioned in the following list.
Remark
During the last years we have developed different repositories within the driver development with the projects sick_scan, sick_scan2 and sick_scan_base, with which many lidars and radars of our company can be used under ROS1, ROS2 and generically under C++. For harmonization, due to customer requests and to increase clarity, we decided to combine these developments in the future. As a result of this work, at the end of 2021 we have created the repository sick_scan_xd, where we will continue future developments. We recommend using this new repository for development so that you can continue to benefit from our improvements and additions to our drivers.
Table of contents
This stack provides a ROS2 driver for the SICK laser scanners mentioned in the following list.
Supported Hardware
This driver should work with all of the following products.
ROS Device Driver for SICK lidar sensors - supported scanner types:
| device name | part no. | description | tested? |
|---|---|---|---|
| TiM240 | 1104981 | 1 layer max. range: 10 m, ang. resol. 1.00 [deg], 240 [deg] | ✔ [prototype] |
| Scan-Rate: 14.5 Hz | |||
| TiM551 | 1060445 | 1 layer max. range: 10 m, ang. resol. 1.00[deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM561 | 1071419 | 1 layer max. range: 10 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM571 | 1079742 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781 | 1096807 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| TiM781S | 1096363 | 1 layer max. range: 25 m, ang. resol. 0.33 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| LMS511-10100 PRO | e.g. 1046135 | 1 layer max. range: 80 m, ang. resol. 0.167 [deg] | ✔ [stable] |
| Scan-Rate: 100 Hz | |||
| LMS1xx-Family | e.g. 1041114 | 1 layer max. range: 28 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 15 Hz | |||
| MRS1104 | 1081208 | 4 layer max. range: 64 m, ang. resol. 0.25 [deg] hor., 2.50 [deg] ver. | ✔ [development] |
| Scan-Rate: 50 Hz, 4x12.5 Hz | |||
| LMS1104 | 1092445 | 1 layer max. range: 64 m, ang. resol. 0.25 [deg] | ✔ [stable] |
| Scan-Rate: 150 Hz, 4x37.5 Hz | |||
| LDMRS | 4 or 8 layer, max. range: 50/320 m, ang. resol. 0.025°/…/0.25 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-50 Hz | |||
| LRS4000 | 1 layer, max. range: 130 m, ang. resol. 0.125/0.25/0.5 [deg] | ✔ [development] | |
| Scan-Rate: 12.5-25 Hz |
Requirements
sick_scan2 has been developed and tested using Linux ROS-2 Foxy. It should be compatible with other ROS-2 versions (but not fully tested).
Start Node
See quick start for further hints.
Sopas Mode
This driver supports both COLA-B (binary) and COLA-A (ASCII) communication with the laser scanner. Binary mode is activated by default. Since this mode generates less network traffic. If the communication mode set in the scanner memory is different from that used by the driver, the scanner’s communication mode is changed. This requires a restart of the TCP-IP connection, which can extend the start time by up to 30 seconds. There are two ways to prevent this:
- [Recommended] Set the communication mode with the SOPAS ET software to binary and save this setting in the scanner’s EEPROM.
- Use the parameter “use_binary_protocol” to overwrite the default settings of the driver.
- Setting “use_binary_protocol” to “False” activates COLA-A and disables COLA-B (default)
Known issue
If the scanner has not been set to binary Sopas in the EEPROM, the automatic restart of the TCP-IP connection does not work after the protocol change. The driver stops in this state:
Workaround
restart the driver node.
Bugs and feature requests
- Stability issues: Driver is experimental and brand new
- Sopas protocol mapping: – All scanners: COLA-B (Binary)
- Software should be further tested, documented and beautified
Troubleshooting
- Check Scanner IP by using fping or SOPAS ET under Windows
- Check Ethernet connection to scanner with netcat e.g.
nc -z -v -w5 $SCANNERIPADDRESS 2112. For further details about setting up the correct ip settings see IP configuration - View node startup output wether the IP connection could be established
- Check the scanner status using the LEDs on the device. The LED codes are described in the above mentioned operation manuals.
- Further testing and troubleshooting informations can found in the file test/readme_testplan.txt
- If you stop the scanner in your debugging IDE or by other hard interruption (like Ctrl-C), you must wait until 60 sec. before
the scanner is up and running again. During this time the MRS6124 reconnects twice.
If you do not wait this waiting time you could see one of the following messages:
- TCP connection error
- Error-Message 0x0d
- Amplitude values in rviz: If you see only one color in rviz try the following: Set the min/max-Range of intensity display in the range [0…200] and switch on the intensity flag in the lauch file
- In case of network problems check your own ip address and the ip address of your laser scanner (by using SOPAS ET).
File truncated at 100 lines see the full file
Changelog for package sick_scan2
0.1.0 (2019-10-22)
- First version of a ROS2 driver for the SICK TiM family.
0.1.1 (2019-10-22)
- Integration Test for Bloom
0.1.2 (2019-10-22)
- Porting to "Dashing"
0.1.9 (2020-10-22)
- tf2-ros dependency added, temperatur to test server added
- Contributors: Michael Lehning
0.1.8 (2020-10-22)
- LDMRS support added scanner simulator added
- migraded print statments to ros2
- implemeted software pll and rssi
- MRS 1xxx Imu support activated
- added MRS1104 support
- Update clion debugging
- Adding TiM240 support info.
- support of TiM240
- prepare TiM240 Correct parameter name "max_ang" in config files to activate the setting.
- Modify max-ang to max_ang in config files.
- Supported hardware list extended
- added new launchfiles and updated readme
- tf2 added
- First draft of LMS511 and LMS111 support and pointcloud2
- Quaternion test added
- Contributors: Michael Lehning, Skyler Pan
0.1.7 (2020-04-16)
-
retrial bloom release
-
Merge pull request #8 from clalancette/fixes Fixes for CMakeLists.txt to build on the buildfarm.
-
Fixes for CMakeLists.txt to build on the buildfarm. A few things done in here:
- Change CMake required version back to 3.5
- Remove unnecessary dependency on pthreads
- Remove duplicate boost dependency.
4. Make sure to find_package(diagnostic_updater) before use. Signed-off-by: Chris Lalancette <<clalancette@openrobotics.org>>
-
Trying to figure out problem with the build farm build farm reports: 23:10:29 /usr/bin/ld: cannot find -lpthreads
-
-pthread option added to build receipt
-
Add pthreads dependancy This addition is triggered by reading 'https://stackoverflow.com/questions/31948521/building-error-using-cmake-cannot-find-lpthreads'
-
pthread dep. added to CMakeLists.txt
-
removed unnecessary dependency from cmakelist.txt
-
Contributors: Chris Lalancette, Michael Lehning
0.1.3 (2019-10-23)
- Integration of TiM781 and TiM781S
0.1.6 (2020-04-16)
- New retrial of bloom release
Package Dependencies
| Deps | Name |
|---|---|
| rosidl_default_generators | |
| ament_cmake | |
| rosidl_default_runtime | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common | |
| diagnostic_updater | |
| rclcpp | |
| sensor_msgs | |
| tf2 | |
| tf2_ros | |
| std_msgs | |
| libsick_ldmrs |
System Dependencies
| Name |
|---|
| boost |