
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS

Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.

TODO: Add scratch built-in documentation
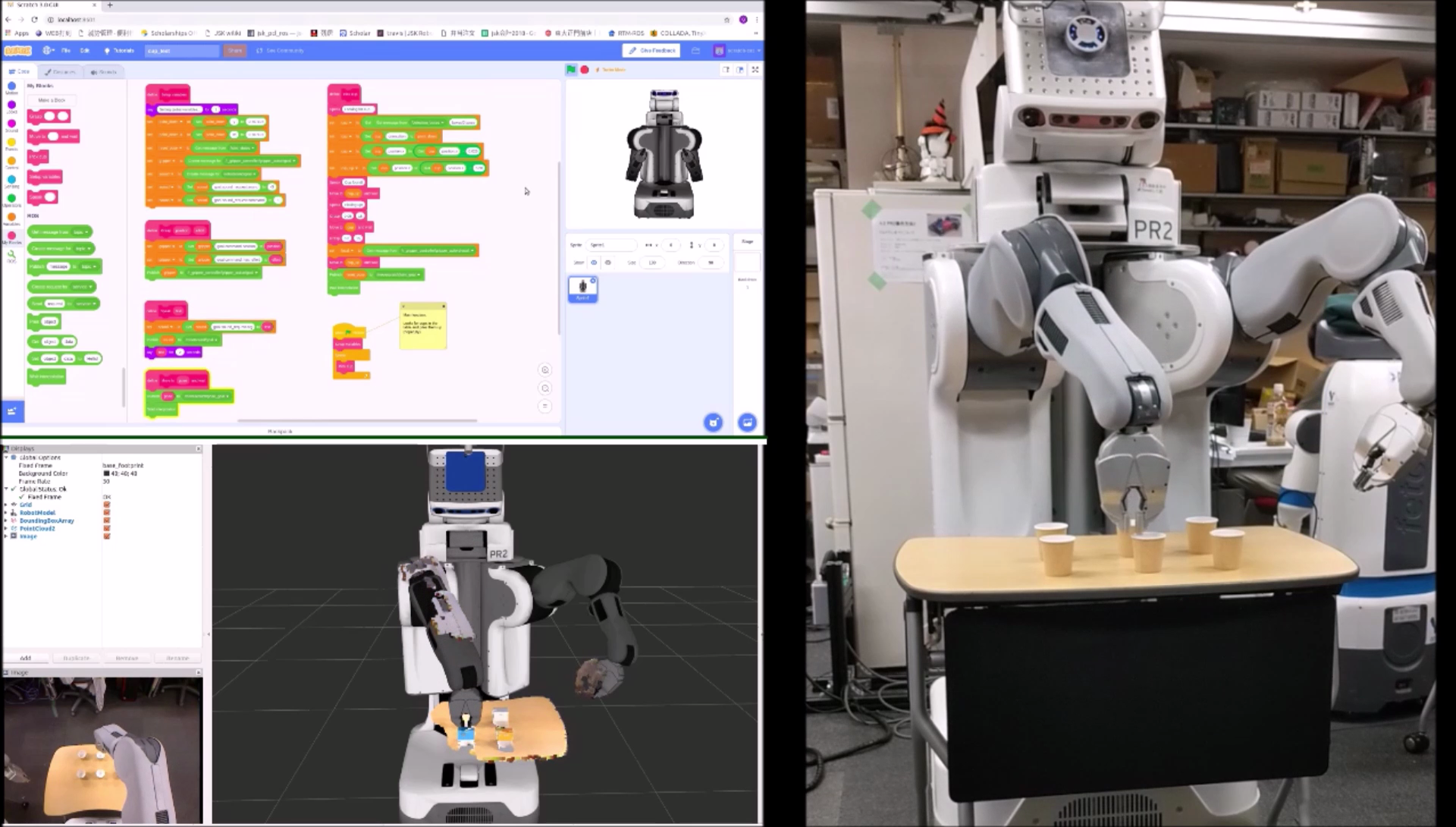
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]
Messages
Services
Plugins
Recent questions tagged scratch3-ros at Robotics Stack Exchange
|
|
scratch3-ros package from jsk_smart_apps repodocomo_perception hrp4_pan_tilt jsk_android_apps jsk_android_gui jsk_android_gui_api9 jsk_android_setup jsk_pr2_core_apps scratch3-ros jsk_smart_gui local_app_manager my_android_package |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | TODO |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_smart_apps.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-11-01 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- affonso
Authors
ROS Extension for Scratch 3
WORK IN PROGRESS
Run from browser
Access https://affonso-gui.github.io/scratch-gui.
MALFUNCTION on ROS connection
Run from source
sudo apt install npm # Tested with versions 6.4.0 and 10.12.0
mkdir Scratch; cd Scratch
git clone https://github.com/Affonso-Gui/scratch-vm.git
git clone https://github.com/Affonso-Gui/scratch-gui.git
cd scratch-vm
npm install
npm link
cd ../scratch-gui
npm install
npm link scratch-vm
npm start
Then, access http://localhost:8601.
Basic Usage
Basic inverse kinematics sample from tork_moveit_tutorial using MoveGroupCommander interface is reproduced in Scratch 3 and shown below.
TODO: Add scratch built-in documentation
Demo Program
This repository have sample programs and launch files for using Scratch 3 ROS extension to control PR2 robot.
To run demos launch demo.launch on a terminal and load files places on examples/ from Scratch 3.
TODO: add turtlesim and turtlebot demos
Package Dependencies
| Deps | Name |
|---|---|
| rospy | |
| catkin | |
| jsk_pcl_ros | |
| jsk_pcl_ros_utils |
System Dependencies
Dependant Packages
Launch files
- launch/demo.launch
- launch/tabletop_detection.launch
-
- ROBOT [default: $(optenv ROBOT sim)]
- INPUT_CLOUD [default: /kinect_head/depth_registered/quater/points]
- INPUT_INFO [default: /kinect_head/depth_registered/camera_info]