|
|
Package Summary
| Tags | No category tags. |
| Version | 0.244.16 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/gazebosim/ros_gz.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-07-22 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Louise Poubel
Authors
ROS + Gazebo Sim demos
This package contains demos showing how to use Gazebo Sim with ROS.
Run Gazebo Sim
There’s a convenient launch file, try for example:
ros2 launch ros_gz_sim gz_sim.launch.py gz_args:="shapes.sdf"
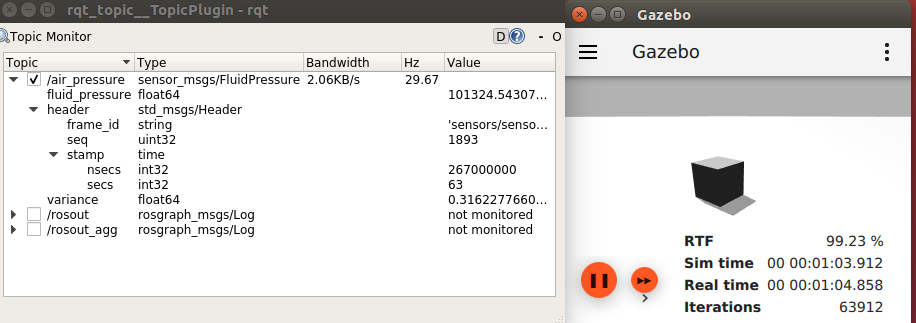
Air pressure
Publishes fluid pressure readings.
ros2 launch ros_gz_sim_demos air_pressure.launch.py
This demo also shows the use of custom QoS parameters. The sensor data is published as as “best-effort”, so trying to subscribe to “reliable” data won’t work. See the difference between:
ros2 topic echo /air_pressure --qos-reliability best_effort
And
ros2 topic echo /air_pressure --qos-reliability reliable
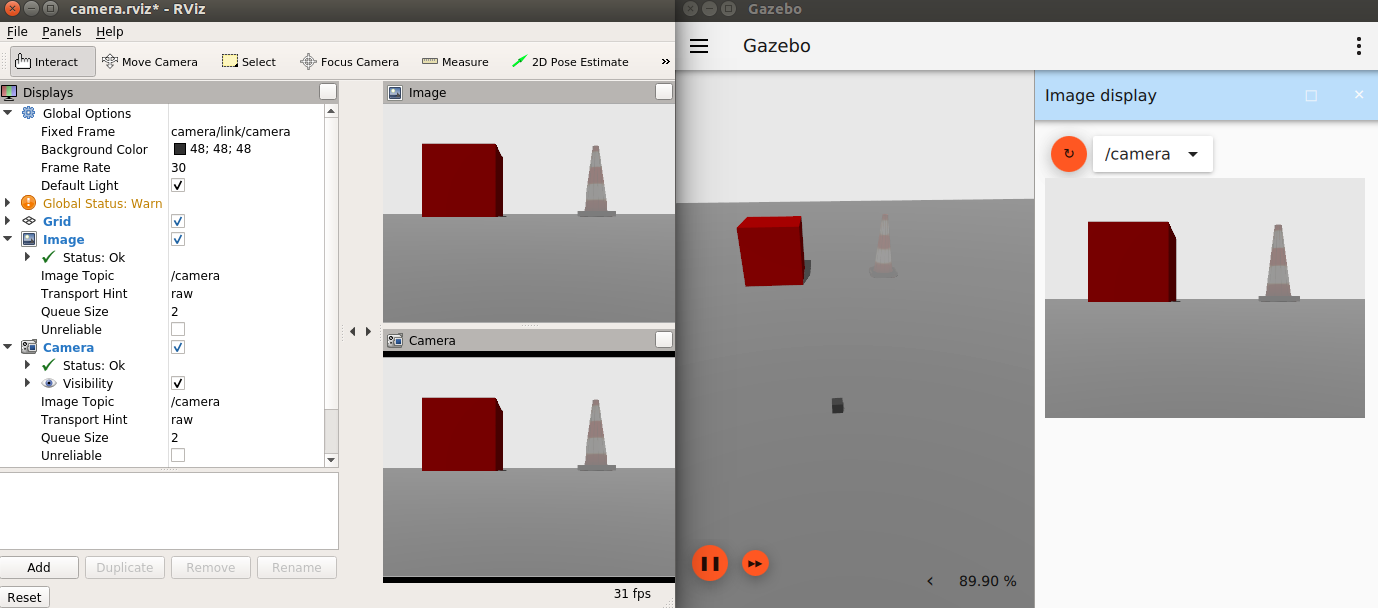
Camera
Publishes RGB camera image and info.
Images can be exposed to ROS through ros_gz_bridge or ros_gz_image.
Using the image bridge (unidirectional, uses image_transport):
ros2 launch ros_gz_sim_demos image_bridge.launch.py
Using the regular bridge:
ros2 launch ros_gz_sim_demos camera.launch.py
To use a camera that only publishes information when triggered:
ros2 launch ros_gz_sim_demos triggered_camera.launch.py
Trigger the camera:
ros2 topic pub /camera/trigger std_msgs/msg/Bool "{data: true}" --once
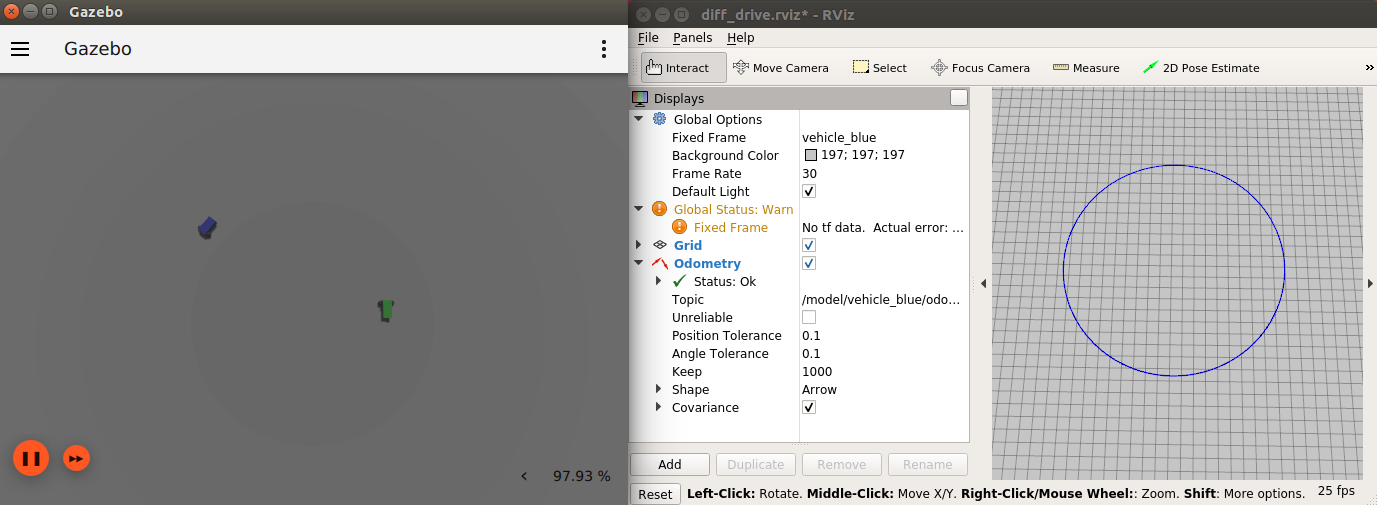
Diff drive
Send commands to a differential drive vehicle and listen to its odometry.
ros2 launch ros_gz_sim_demos diff_drive.launch.py
Then unpause and send a command
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"
This demo also shows the use of custom QoS parameters. The commands are subscribed to as “reliable”, so trying to publish “best-effort” commands won’t work. See the difference between:
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.0}}" --qos-reliability reliable
And
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.0}}" --qos-reliability best_effort
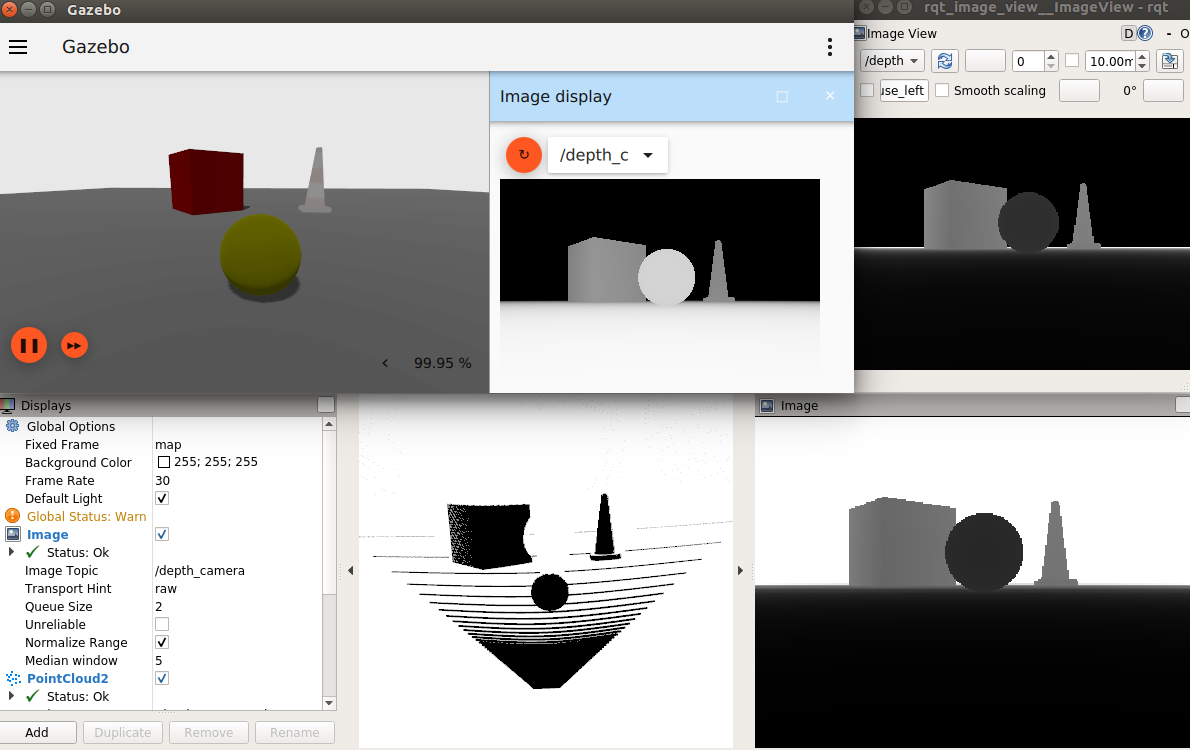
Depth camera
Depth camera data can be obtained as:
-
sensor_msgs/msg/Image, throughros_gz_bridgeorros_gz_image -
sensor_msgs/msg/PointCloud2, throughros_gz_point_cloud
Using the image bridge (unidirectional, uses image_transport):
ros2 launch ros_gz_sim_demos image_bridge.launch.py image_topic:=/depth_camera
TODO: Blocked by ros_gz_point_cloud issue.
Using Gazebo Sim plugin:
ros2 launch ros_gz_sim_demos depth_camera.launch.py
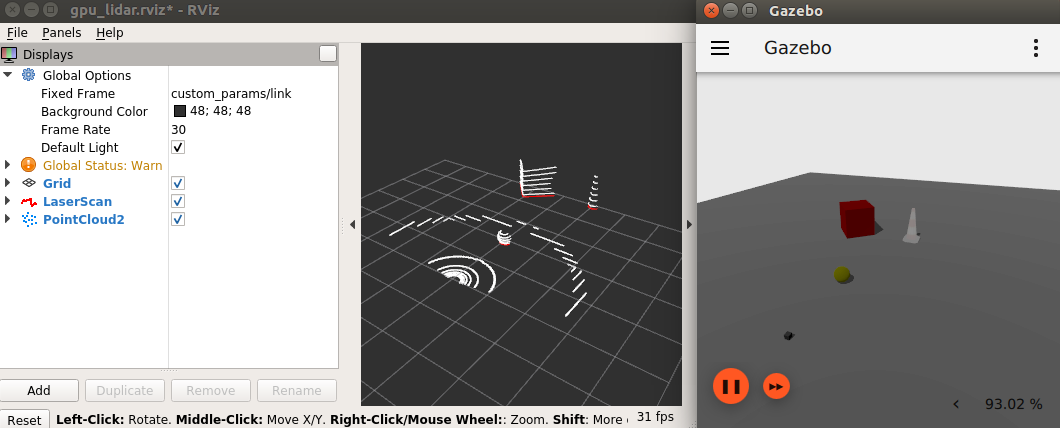
GPU lidar
GPU lidar data can be obtained as:
-
sensor_msgs/msg/LaserScan, through theros_gz_bridge -
sensor_msgs/msg/PointCloud2, through theros_gz_bridgeorros_gz_point_cloud
Using the bridge:
ros2 launch ros_gz_sim_demos gpu_lidar_bridge.launch.py
TODO: Blocked by ros_gz_point_cloud issue.
Using Gazebo Sim plugin:
ros2 launch ros_gz_sim_demos gpu_lidar.launch.py
IMU
Publishes IMU readings.
ros2 launch ros_gz_sim_demos imu.launch.py
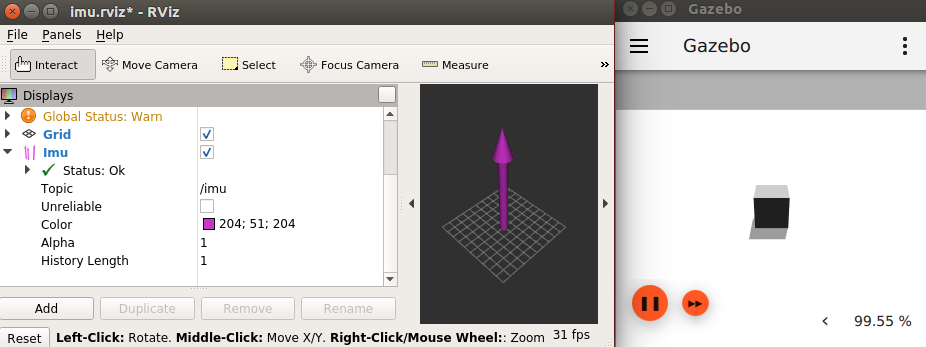
TODO: IMU display missing for RViz2
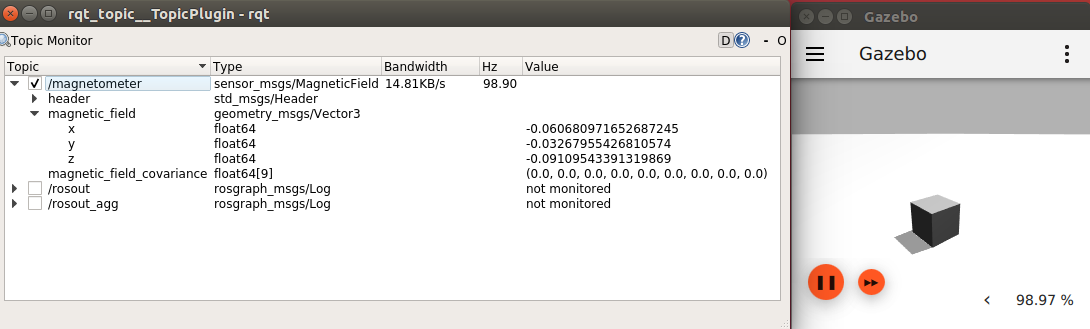
Magnetometer
Publishes magnetic field readings.
ros2 launch ros_gz_sim_demos magnetometer.launch.py
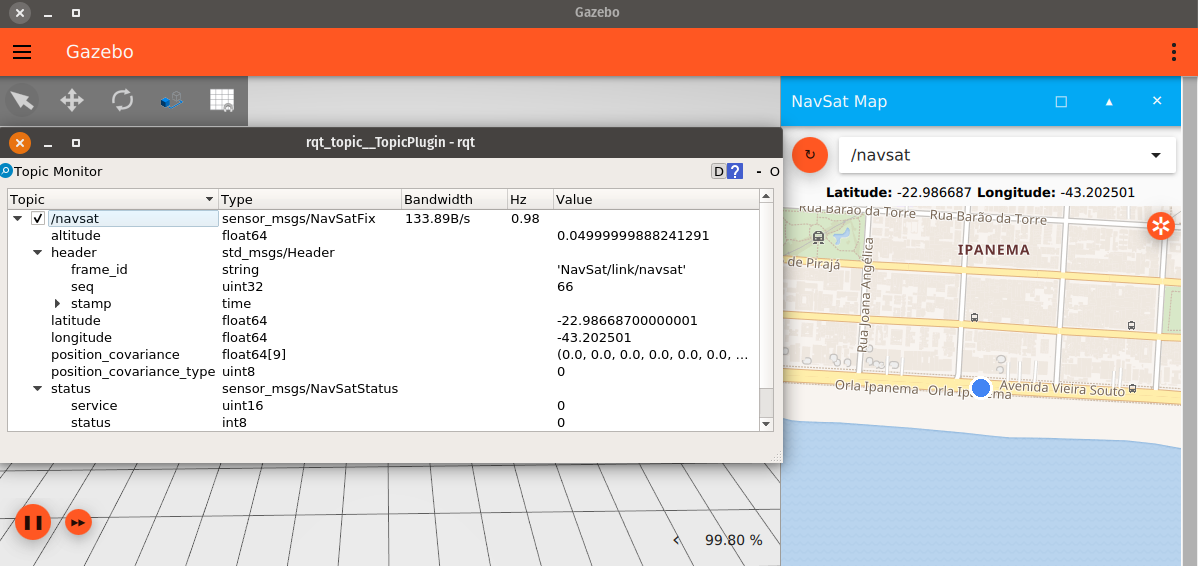
GNSS
Publishes satellite navigation readings, only available in Fortress on.
ros2 launch ros_gz_sim_demos navsat.launch.py
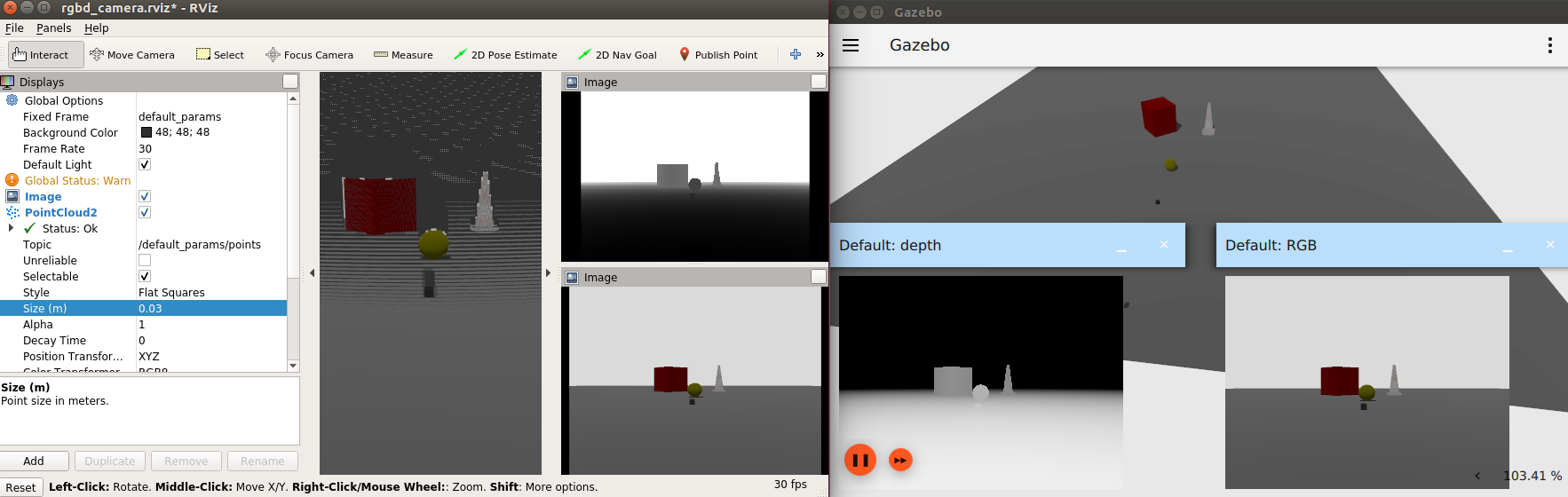
RGBD camera
RGBD camera data can be obtained as:
-
sensor_msgs/msg/Image, throughros_gz_bridgeorros_gz_image -
sensor_msgs/msg/PointCloud2, throughros_gz_bridgeorros_gz_point_cloud
Using the image bridge (unidirectional, uses image_transport):
# RGB image
ros2 launch ros_gz_sim_demos image_bridge.launch.py image_topic:=/rgbd_camera/image
# Depth image
ros2 launch ros_gz_sim_demos image_bridge.launch.py image_topic:=/rgbd_camera/depth_image
Using the regular bridge:
ros2 launch ros_gz_sim_demos rgbd_camera_bridge.launch.py
TODO: Blocked by ros_gz_point_cloud issue.
Using Gazebo Sim plugin:
ros2 launch ros_gz_sim_demos rgbd_camera.launch.py
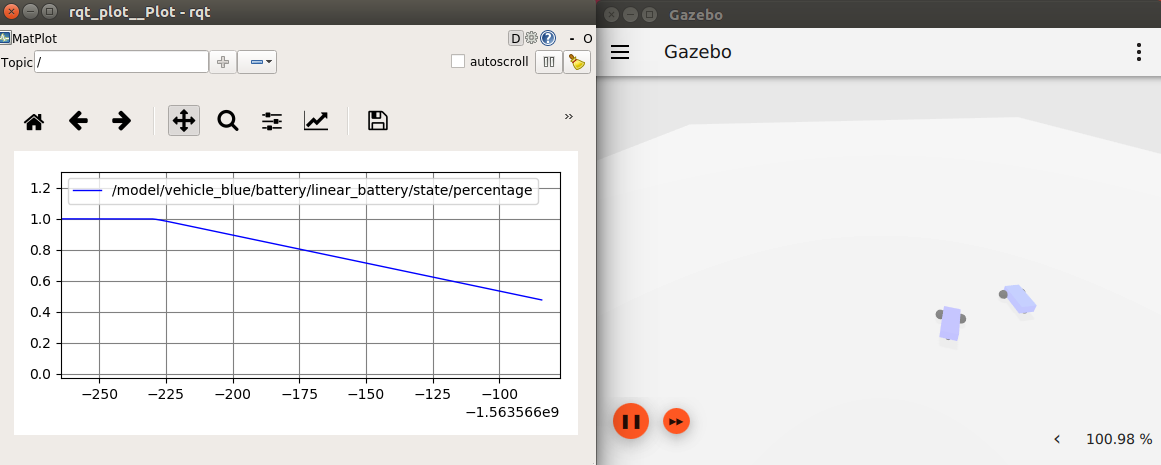
Battery
Get the current state of a battery.
ros2 launch ros_gz_sim_demos battery.launch.py
Then send a command so the vehicle moves and drains the battery
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"
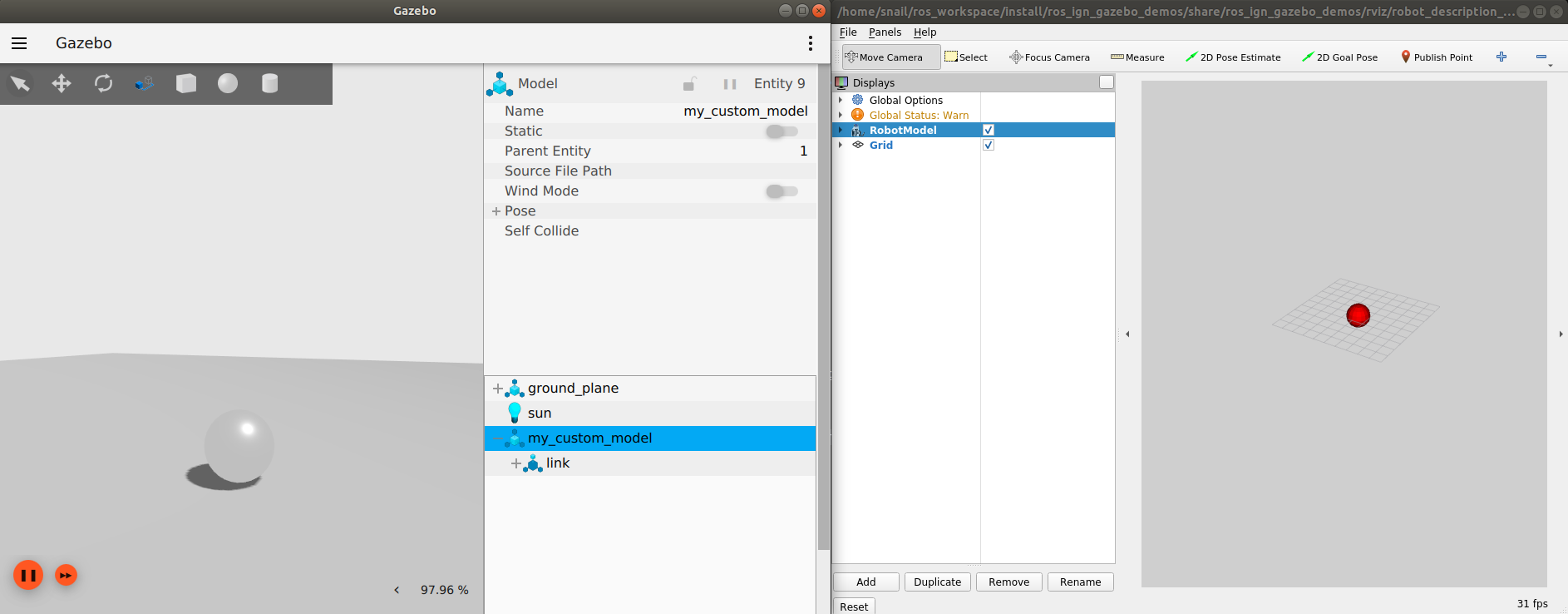
Robot description publisher
Leverage the robot description publisher to spawn a new urdf model in gazebo and show it in rviz2. To try the demo launch:
ros2 launch ros_gz_sim_demos robot_description_publisher.launch.py
Joint States Publisher
Publishes joint states of the robot.
To try the demo launch:
ros2 launch ros_gz_sim_demos joint_states.launch.py
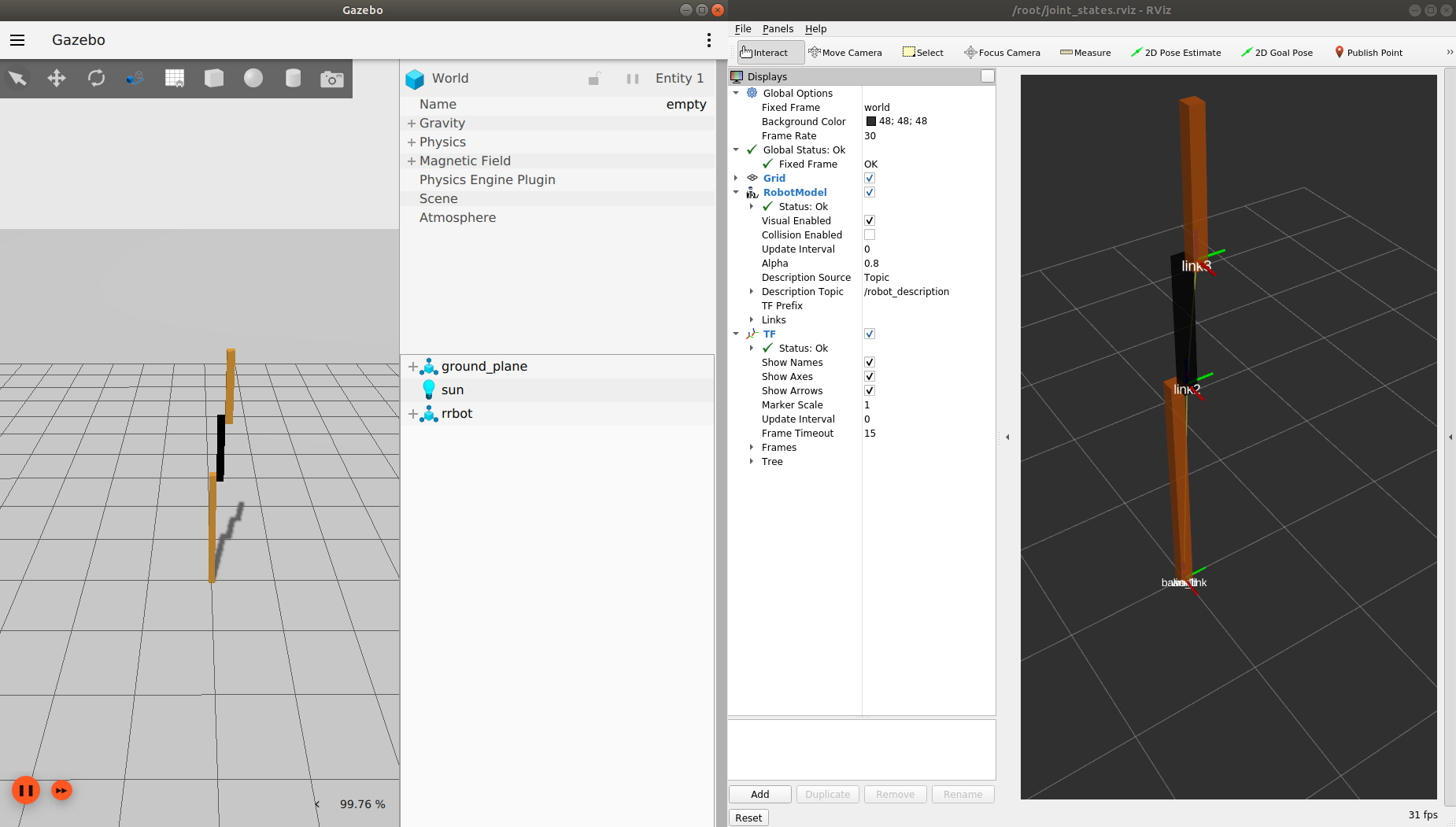
Bridging joint state and pose publishers
The launch file demonstrates bridging Gazebo poses to TFMessage to visualize the pose and transforms of a robot in rviz.
To try the demo launch:
ros2 launch ros_gz_sim_demos tf_bridge.launch.py
Changelog for package ros1_gz_sim_demos
0.244.16 (2024-07-22)
0.244.15 (2024-07-03)
- [backport Humble] Create bridge for GPSFix msg (#316) (#538) Co-authored-by: Rousseau Vincent <<vincentrou@gmail.com>>
- Contributors: Alejandro Hernández Cordero
0.244.14 (2024-04-08)
0.244.13 (2024-01-23)
0.244.12 (2023-12-13)
- [backport Humble] Added more topic to the bridge (#422)
- Added more topic to the bridge (#422)
- Fix incorrect subscription on demo (#405)
- Contributors: Alejandro Hernández Cordero, Arjo Chakravarty
0.244.11 (2023-05-23)
0.244.10 (2023-05-03)
0.244.9 (2022-11-03)
0.244.8 (2022-10-28)
0.244.7 (2022-10-12)
- Merge pull request #275 (Galactic to Humble) Galactic to Humble
- Merge branch 'ros2' into ports/galactic_to_ros2
- Contributors: Michael Carroll
0.244.6 (2022-09-14)
0.244.5 (2022-09-12)
- sdformat_urdf parser demo
(#265)
- parser compatible model and launch framework
- added ground plane, common gz plugins, demo commands and cleaned install paths
- unique collision names and cleared flake
- updating model config
- building parser from source
- fix flake and update deb dependency for garden
- Move packages and files to gz
- feedback and ign->gz
* Support ros_ign migration Clean up shared libraries, and tick-tock RosGzPointCloud Tick-tock launch args Hard-tock ign_ in sources Migrate ign, ign_, IGN_ for sources, launch, and test files Migrate IGN_XXX_VER, IGN_T, header guards Migrate launchfile, launchfile args, and test source references Migrate ros_ign_XXX and gz_gazebo -> gz_sim Migrate ros_ign_XXX project names Migrate Ign, ign-, IGN_DEPS, ign-gazebo Migrate ignitionrobotics, ignitionrobotics/ros_ign, osrf/ros_ign Migrate ignition-version, IGNITION_VERSION, Ignition <LIB>, ros_ign_ci
- renaming and flake
- added ros commands
- gz-version
- feedback and ci trial
* removing garden condition Co-authored-by: Michael Carroll <<michael@openrobotics.org>> Co-authored-by: methylDragon <<methylDragon@gmail.com>> Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Support ros_ign migration (#282) Clean up shared libraries, and tick-tock RosGzPointCloud Tick-tock launch args Hard-tock ign_ in sources Migrate ign, ign_, IGN_ for sources, launch, and test files Migrate IGN_XXX_VER, IGN_T, header guards Migrate launchfile, launchfile args, and test source references Migrate ros_ign_XXX and gz_gazebo -> gz_sim Migrate ros_ign_XXX project names Migrate Ign, ign-, IGN_DEPS, ign-gazebo Migrate ignitionrobotics, ignitionrobotics/ros_ign, osrf/ros_ign Migrate ignition-version, IGNITION_VERSION, Ignition <LIB>, ros_ign_ci
- Move packages and files to gz (#282)
- Contributors: Dharini Dutia, methylDragon
0.244.3 (2022-05-19)
- [ros2] README updates (service bridge, Gazebo rename) (#252)
- Fix linter tests (#251) Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
-
Joint state publisher and tf bridging demo (#244) * Added joint state publisher and tf bridge demo Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Contributors: Aditya Pande, Daisuke Nishimatsu, Louise Poubel
0.244.2 (2022-04-25)
- Camera trigger demo (#223)
- Separate galactic branch from ros2 branch (#201)
- 🏁 Dome EOL (#198)
- Joint states tutorial (#156) Adds an rrbot model to demos and shows the usage of joint_states plugin.
- Contributors: Louise Poubel, Michael Carroll, Vatan Aksoy Tezer, William Lew
0.244.1 (2022-01-04)
0.244.0 (2021-12-30)
- Default to Fortress for Rolling (future Humble) (#195)
- [ros2] 🏁 Dome EOL (#199)
- Enable QoS overrides (#181)
- Contributors: Guillaume Doisy, Louise Poubel
0.233.2 (2021-07-20)
- [ros2] Add exec depend on xacro for demos (#170)
- [ros2] Update version docs, add Galactic and Fortress (#164)
- Joint states tutorial (#156) Adds an rrbot model to demos and shows the usage of joint_states plugin.
- Contributors: Louise Poubel, Vatan Aksoy Tezer
0.233.1 (2021-04-16)
- Default to Edifice for Rolling (#150)
- Minor updates for demos
(#144)
- Re-enable air pressure demo
- Resolves https://github.com/gazebosim/ros_gz/issues/78
- Add RQt topic viewer to IMU demo
- Add image_topic argument for image_bridge demo
- Do not normalize depth image in RViz2
- Edifice support (#140)
- Add topic flag to create robot (#128) Now it is possible to run ros_gz_sim create specifying a topic as source of the robot description Add a launch file starting a ignition gazebo world and spawn a sphere in it. Additionally a rviz2 interface is loaded to show that also Rviz can load the robot description The newly created demo introduce a dependency on the robot_state_publisher package
- [ros2] Update releases (#108)
- Contributors: Andrej Orsula, Louise Poubel, Valerio Magnago
0.221.1 (2020-08-19)
0.221.0 (2020-07-23)
- Updated launch file to use ros_gz_sim (#82) Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Use new ros_gz_sim package on ROS 2 demos (#85) Co-authored-by: Alejandro Hernández Cordero <<ahcorde@gmail.com>>
- [WIP] Port ign_ros_gazebo_demos to ROS2 (#58) Port ros_gz_image to ROS2 Port ros_gz_sim_demos to ROS2
- Enable ROS2 CI for Dashing branch (#43)
- Make all API and comments ROS-version agnostic
- Rename packages and fix compilation + tests
- Move files ros1 -> ros
- Contributors: Alejandro Hernández Cordero, Jose Luis Rivero, Louise Poubel, chapulina
0.7.0 (2019-08-15)
0.6.3 (2019-08-04)
0.6.2 (2019-08-04)
0.6.1 (2019-08-04)
0.6.0 (2019-08-02)
- Image bridge using image_transport
(#34)
- Image bridge using image_transport
- tests for image
- correct metapackage
* tests with catkin Signed-off-by: Louise Poubel <<louise@openrobotics.org>> * Revert changes from #32 Signed-off-by: Louise Poubel <<louise@openrobotics.org>>
- Revert "Pointcloud bridge demo for depth camera" This reverts commit 094cd40f21aed734d59c204172ad5afd7a26c8d6.
- Pointcloud bridge demo for depth camera
- Contributors: Louise Poubel, chapulina
- 0.5.0
- Battery state (#30)
- Packed demo
(#29)
- adding demo for point cloud packed bridge
- correct rviz file
- RGBD bridged cloud demo
- Merge pull request #28 from osrf/pointcloudpacked Bridge point cloud packed
- Contributors: Nate Koenig, chapulina
- Battery state (#30)
- Packed demo
(#29)
- adding demo for point cloud packed bridge
- correct rviz file
- RGBD bridged cloud demo
- Merge pull request #28 from osrf/pointcloudpacked Bridge point cloud packed
- Contributors: Nate Koenig, chapulina
0.4.0 (2019-07-16)
0.3.1 (2019-07-01)
- Merge pull request #24 from osrf/fix_dep ignition-gazebo2 needed at build time
- ignition-gazebo2 needed at build time
- Contributors: Jose Luis Rivero
0.3.0 (2019-06-28)
- 0.2.0
- Merge pull request #21 from osrf/lidar Point clouds from lidars
- Conversion between nav_msgs/Odometry and ignition::msgs::Odometry
(#22)
- Conversion between nav_msgs/Odometry and ignition::msgs::Odometry.
- Update documentation.
- More time to run tests
- Cleaning test_utils.
- Remove explicit ROS dependencies for Travis.
- diff drive demo with cmd_vel and odom
- process child frame id
- final tweaks
- PC2 for gpu_lidar, 1 vertical sample
- Start of lidar PC
- Fluid pressure
(#20)
- screenshots
- missing IMU
- Fluid pressure
- Fix tests.
- Demos package
(#19)
- Start of demos package: camera
- IMU
- depth camera
- magnetometer
- lidar, base launch
- READMEs, RGBD camera
- screenshots
- missing IMU
- set plugin path env
- It's best to always set it
- Contributors: Carlos Agüero, Nate Koenig, chapulina
0.2.2 (2019-05-20)
0.2.1 (2019-05-11)
0.2.0 (2019-05-09)
0.1.0 (2019-03-20)
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| image_transport_plugins | |
| robot_state_publisher | |
| ros_gz_bridge | |
| ros_gz_sim | |
| ros_gz_image | |
| rqt_image_view | |
| rqt_plot | |
| rqt_topic | |
| rviz2 | |
| sdformat_urdf | |
| xacro | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| ros_gz | |
| ros_ign_gazebo_demos |
Launch files
Messages
Services
Plugins
Recent questions tagged ros_gz_sim_demos at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.254.2 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/gazebosim/ros_gz.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2024-07-03 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Louise Poubel
Authors
ROS + Gazebo Sim demos
This package contains demos showing how to use Gazebo Sim with ROS.
Run Gazebo Sim
There’s a convenient launch file, try for example:
ros2 launch ros_gz_sim gz_sim.launch.py gz_args:="shapes.sdf"

Air pressure
Publishes fluid pressure readings.
ros2 launch ros_gz_sim_demos air_pressure.launch.py
This demo also shows the use of custom QoS parameters. The sensor data is published as as “best-effort”, so trying to subscribe to “reliable” data won’t work. See the difference between:
ros2 topic echo /air_pressure --qos-reliability best_effort
And
ros2 topic echo /air_pressure --qos-reliability reliable

Camera
Publishes RGB camera image and info.
Images can be exposed to ROS through ros_gz_bridge or ros_gz_image.
Using the image bridge (unidirectional, uses image_transport):
ros2 launch ros_gz_sim_demos image_bridge.launch.py
Using the regular bridge:
ros2 launch ros_gz_sim_demos camera.launch.py
To use a camera that only publishes information when triggered:
ros2 launch ros_gz_sim_demos triggered_camera.launch.py
Trigger the camera:
ros2 topic pub /camera/trigger std_msgs/msg/Bool "{data: true}" --once

Diff drive
Send commands to a differential drive vehicle and listen to its odometry.
ros2 launch ros_gz_sim_demos diff_drive.launch.py
Then unpause and send a command
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"
This demo also shows the use of custom QoS parameters. The commands are subscribed to as “reliable”, so trying to publish “best-effort” commands won’t work. See the difference between:
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.0}}" --qos-reliability reliable
And
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.0}}" --qos-reliability best_effort

Depth camera
Depth camera data can be obtained as:
-
sensor_msgs/msg/Image, throughros_gz_bridgeorros_gz_image -
sensor_msgs/msg/PointCloud2, throughros_gz_point_cloud
Using the image bridge (unidirectional, uses image_transport):
ros2 launch ros_gz_sim_demos image_bridge.launch.py image_topic:=/depth_camera
TODO: Blocked by ros_gz_point_cloud issue.
Using Gazebo Sim plugin:
ros2 launch ros_gz_sim_demos depth_camera.launch.py

GPU lidar
GPU lidar data can be obtained as:
-
sensor_msgs/msg/LaserScan, through theros_gz_bridge -
sensor_msgs/msg/PointCloud2, through theros_gz_bridgeorros_gz_point_cloud
Using the bridge:
ros2 launch ros_gz_sim_demos gpu_lidar_bridge.launch.py
TODO: Blocked by ros_gz_point_cloud issue.
Using Gazebo Sim plugin:
ros2 launch ros_gz_sim_demos gpu_lidar.launch.py

IMU
Publishes IMU readings.
ros2 launch ros_gz_sim_demos imu.launch.py

TODO: IMU display missing for RViz2
Magnetometer
Publishes magnetic field readings.
ros2 launch ros_gz_sim_demos magnetometer.launch.py

GNSS
Publishes satellite navigation readings, only available in Fortress on.
ros2 launch ros_gz_sim_demos navsat.launch.py

RGBD camera
RGBD camera data can be obtained as:
-
sensor_msgs/msg/Image, throughros_gz_bridgeorros_gz_image -
sensor_msgs/msg/PointCloud2, throughros_gz_bridgeorros_gz_point_cloud
Using the image bridge (unidirectional, uses image_transport):
# RGB image
ros2 launch ros_gz_sim_demos image_bridge.launch.py image_topic:=/rgbd_camera/image
# Depth image
ros2 launch ros_gz_sim_demos image_bridge.launch.py image_topic:=/rgbd_camera/depth_image
Using the regular bridge:
ros2 launch ros_gz_sim_demos rgbd_camera_bridge.launch.py
TODO: Blocked by ros_gz_point_cloud issue.
Using Gazebo Sim plugin:
ros2 launch ros_gz_sim_demos rgbd_camera.launch.py

Battery
Get the current state of a battery.
ros2 launch ros_gz_sim_demos battery.launch.py
Then send a command so the vehicle moves and drains the battery
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"

Robot description publisher
Leverage the robot description publisher to spawn a new urdf model in gazebo and show it in rviz2. To try the demo launch:
ros2 launch ros_gz_sim_demos robot_description_publisher.launch.py

Joint States Publisher
Publishes joint states of the robot.
To try the demo launch:
ros2 launch ros_gz_sim_demos joint_states.launch.py

Bridging joint state and pose publishers
The launch file demonstrates bridging Gazebo poses to TFMessage to visualize the pose and transforms of a robot in rviz.
To try the demo launch:
ros2 launch ros_gz_sim_demos tf_bridge.launch.py

Changelog for package ros1_gz_sim_demos
0.254.2 (2024-07-03)
- [backport Humble] Create bridge for GPSFix msg (#316) (#538) Co-authored-by: Rousseau Vincent <<vincentrou@gmail.com>>
- [backport Iron] Create bridge for GPSFix msg (#316) (#537) Co-authored-by: Rousseau Vincent <<vincentrou@gmail.com>>
- 0.244.14
- Changelog
- 0.244.13
- Changelog
- 0.244.12
- Changelog
- Contributors: Addisu Z. Taddese, Alejandro Hernández Cordero
0.254.1 (2024-04-08)
0.254.0 (2024-01-08)
0.247.0 (2023-11-02)
- Merge branch 'iron' into ahcorde/iron/backport/411
- Added more topic to the bridge (#422) (#423)
- Fix incorrect subscription on demo (#405) (#407) Co-authored-by: Arjo Chakravarty <<arjoc@intrinsic.ai>>
- Contributors: Alejandro Hernández Cordero
0.245.0 (2023-05-23)
0.244.11 (2023-05-23)
0.244.10 (2023-05-03)
0.244.9 (2022-11-03)
0.244.8 (2022-10-28)
0.244.7 (2022-10-12)
- Merge pull request #275 (Galactic to Humble) Galactic to Humble
- Merge branch 'ros2' into ports/galactic_to_ros2
- Contributors: Michael Carroll
0.244.6 (2022-09-14)
0.244.5 (2022-09-12)
- sdformat_urdf parser demo
(#265)
- parser compatible model and launch framework
- added ground plane, common gz plugins, demo commands and cleaned install paths
- unique collision names and cleared flake
- updating model config
- building parser from source
- fix flake and update deb dependency for garden
- Move packages and files to gz
- feedback and ign->gz
* Support ros_ign migration Clean up shared libraries, and tick-tock RosGzPointCloud Tick-tock launch args Hard-tock ign_ in sources Migrate ign, ign_, IGN_ for sources, launch, and test files Migrate IGN_XXX_VER, IGN_T, header guards Migrate launchfile, launchfile args, and test source references Migrate ros_ign_XXX and gz_gazebo -> gz_sim Migrate ros_ign_XXX project names Migrate Ign, ign-, IGN_DEPS, ign-gazebo Migrate ignitionrobotics, ignitionrobotics/ros_ign, osrf/ros_ign Migrate ignition-version, IGNITION_VERSION, Ignition <LIB>, ros_ign_ci
- renaming and flake
- added ros commands
- gz-version
- feedback and ci trial
* removing garden condition Co-authored-by: Michael Carroll <<michael@openrobotics.org>> Co-authored-by: methylDragon <<methylDragon@gmail.com>> Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Support ros_ign migration (#282) Clean up shared libraries, and tick-tock RosGzPointCloud Tick-tock launch args Hard-tock ign_ in sources Migrate ign, ign_, IGN_ for sources, launch, and test files Migrate IGN_XXX_VER, IGN_T, header guards Migrate launchfile, launchfile args, and test source references Migrate ros_ign_XXX and gz_gazebo -> gz_sim Migrate ros_ign_XXX project names Migrate Ign, ign-, IGN_DEPS, ign-gazebo Migrate ignitionrobotics, ignitionrobotics/ros_ign, osrf/ros_ign Migrate ignition-version, IGNITION_VERSION, Ignition <LIB>, ros_ign_ci
- Move packages and files to gz (#282)
- Contributors: Dharini Dutia, methylDragon
0.244.3 (2022-05-19)
- [ros2] README updates (service bridge, Gazebo rename) (#252)
- Fix linter tests (#251) Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
-
Joint state publisher and tf bridging demo (#244) * Added joint state publisher and tf bridge demo Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Contributors: Aditya Pande, Daisuke Nishimatsu, Louise Poubel
0.244.2 (2022-04-25)
- Camera trigger demo (#223)
- Separate galactic branch from ros2 branch (#201)
- 🏁 Dome EOL (#198)
- Joint states tutorial (#156) Adds an rrbot model to demos and shows the usage of joint_states plugin.
- Contributors: Louise Poubel, Michael Carroll, Vatan Aksoy Tezer, William Lew
0.244.1 (2022-01-04)
0.244.0 (2021-12-30)
- Default to Fortress for Rolling (future Humble) (#195)
- [ros2] 🏁 Dome EOL (#199)
- Enable QoS overrides (#181)
- Contributors: Guillaume Doisy, Louise Poubel
0.233.2 (2021-07-20)
- [ros2] Add exec depend on xacro for demos (#170)
- [ros2] Update version docs, add Galactic and Fortress (#164)
- Joint states tutorial (#156) Adds an rrbot model to demos and shows the usage of joint_states plugin.
- Contributors: Louise Poubel, Vatan Aksoy Tezer
0.233.1 (2021-04-16)
- Default to Edifice for Rolling (#150)
- Minor updates for demos
(#144)
- Re-enable air pressure demo
- Resolves https://github.com/gazebosim/ros_gz/issues/78
- Add RQt topic viewer to IMU demo
- Add image_topic argument for image_bridge demo
- Do not normalize depth image in RViz2
- Edifice support (#140)
- Add topic flag to create robot (#128) Now it is possible to run ros_gz_sim create specifying a topic as source of the robot description Add a launch file starting a ignition gazebo world and spawn a sphere in it. Additionally a rviz2 interface is loaded to show that also Rviz can load the robot description The newly created demo introduce a dependency on the robot_state_publisher package
- [ros2] Update releases (#108)
- Contributors: Andrej Orsula, Louise Poubel, Valerio Magnago
0.221.1 (2020-08-19)
0.221.0 (2020-07-23)
- Updated launch file to use ros_gz_sim (#82) Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Use new ros_gz_sim package on ROS 2 demos (#85) Co-authored-by: Alejandro Hernández Cordero <<ahcorde@gmail.com>>
- [WIP] Port ign_ros_gazebo_demos to ROS2 (#58) Port ros_gz_image to ROS2 Port ros_gz_sim_demos to ROS2
- Enable ROS2 CI for Dashing branch (#43)
- Make all API and comments ROS-version agnostic
- Rename packages and fix compilation + tests
- Move files ros1 -> ros
- Contributors: Alejandro Hernández Cordero, Jose Luis Rivero, Louise Poubel, chapulina
0.7.0 (2019-08-15)
0.6.3 (2019-08-04)
0.6.2 (2019-08-04)
0.6.1 (2019-08-04)
0.6.0 (2019-08-02)
- Image bridge using image_transport
(#34)
- Image bridge using image_transport
- tests for image
- correct metapackage
* tests with catkin Signed-off-by: Louise Poubel <<louise@openrobotics.org>> * Revert changes from #32 Signed-off-by: Louise Poubel <<louise@openrobotics.org>>
- Revert "Pointcloud bridge demo for depth camera" This reverts commit 094cd40f21aed734d59c204172ad5afd7a26c8d6.
- Pointcloud bridge demo for depth camera
- Contributors: Louise Poubel, chapulina
- 0.5.0
- Battery state (#30)
- Packed demo
(#29)
- adding demo for point cloud packed bridge
- correct rviz file
- RGBD bridged cloud demo
- Merge pull request #28 from osrf/pointcloudpacked Bridge point cloud packed
- Contributors: Nate Koenig, chapulina
- Battery state (#30)
- Packed demo
(#29)
- adding demo for point cloud packed bridge
- correct rviz file
- RGBD bridged cloud demo
- Merge pull request #28 from osrf/pointcloudpacked Bridge point cloud packed
- Contributors: Nate Koenig, chapulina
0.4.0 (2019-07-16)
0.3.1 (2019-07-01)
- Merge pull request #24 from osrf/fix_dep ignition-gazebo2 needed at build time
- ignition-gazebo2 needed at build time
- Contributors: Jose Luis Rivero
0.3.0 (2019-06-28)
- 0.2.0
- Merge pull request #21 from osrf/lidar Point clouds from lidars
- Conversion between nav_msgs/Odometry and ignition::msgs::Odometry
(#22)
- Conversion between nav_msgs/Odometry and ignition::msgs::Odometry.
- Update documentation.
- More time to run tests
- Cleaning test_utils.
- Remove explicit ROS dependencies for Travis.
- diff drive demo with cmd_vel and odom
- process child frame id
- final tweaks
- PC2 for gpu_lidar, 1 vertical sample
- Start of lidar PC
- Fluid pressure
(#20)
- screenshots
- missing IMU
- Fluid pressure
- Fix tests.
- Demos package
(#19)
- Start of demos package: camera
- IMU
- depth camera
- magnetometer
- lidar, base launch
- READMEs, RGBD camera
- screenshots
- missing IMU
- set plugin path env
- It's best to always set it
- Contributors: Carlos Agüero, Nate Koenig, chapulina
0.2.2 (2019-05-20)
0.2.1 (2019-05-11)
0.2.0 (2019-05-09)
0.1.0 (2019-03-20)
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| image_transport_plugins | |
| robot_state_publisher | |
| ros_gz_bridge | |
| ros_gz_sim | |
| ros_gz_image | |
| rqt_image_view | |
| rqt_plot | |
| rqt_topic | |
| rviz2 | |
| sdformat_urdf | |
| xacro | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| ros_gz | |
| ros_ign_gazebo_demos |
Launch files
Messages
Services
Plugins
Recent questions tagged ros_gz_sim_demos at Robotics Stack Exchange

|
ros_gz_sim_demos package from ros_gz reporos_gz ros_gz_bridge ros_gz_image ros_gz_interfaces ros_gz_point_cloud ros_gz_sim ros_gz_sim_demos test_ros_gz_bridge |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.5 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/gazebosim/ros_gz.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2024-10-18 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Aditya Pande
- Alejandro Hernandez
Authors
- Louise Poubel
ROS + Gazebo Sim demos
This package contains demos showing how to use Gazebo Sim with ROS.
Run Gazebo Sim
There’s a convenient launch file, try for example:
ros2 launch ros_gz_sim gz_sim.launch.py gz_args:="shapes.sdf"

Air pressure
Publishes fluid pressure readings.
ros2 launch ros_gz_sim_demos air_pressure.launch.py
This demo also shows the use of custom QoS parameters. The sensor data is published as as “best-effort”, so trying to subscribe to “reliable” data won’t work. See the difference between:
ros2 topic echo /air_pressure --qos-reliability best_effort
And
ros2 topic echo /air_pressure --qos-reliability reliable

Camera
Publishes RGB camera image and info.
Images can be exposed to ROS through ros_gz_bridge or ros_gz_image.
Using the image bridge (unidirectional, uses image_transport):
ros2 launch ros_gz_sim_demos image_bridge.launch.py
Using the regular bridge:
ros2 launch ros_gz_sim_demos camera.launch.py
To use a camera that only publishes information when triggered:
ros2 launch ros_gz_sim_demos triggered_camera.launch.py
Trigger the camera:
ros2 topic pub /camera/trigger std_msgs/msg/Bool "{data: true}" --once

Diff drive
Send commands to a differential drive vehicle and listen to its odometry.
ros2 launch ros_gz_sim_demos diff_drive.launch.py
Then unpause and send a command
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"
This demo also shows the use of custom QoS parameters. The commands are subscribed to as “reliable”, so trying to publish “best-effort” commands won’t work. See the difference between:
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.0}}" --qos-reliability reliable
And
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.0}}" --qos-reliability best_effort

Depth camera
Depth camera data can be obtained as:
-
sensor_msgs/msg/Image, throughros_gz_bridgeorros_gz_image -
sensor_msgs/msg/PointCloud2, throughros_gz_point_cloud
Using the image bridge (unidirectional, uses image_transport):
ros2 launch ros_gz_sim_demos image_bridge.launch.py image_topic:=/depth_camera
TODO: Blocked by ros_gz_point_cloud issue.
Using Gazebo Sim plugin:
ros2 launch ros_gz_sim_demos depth_camera.launch.py

GPU lidar
GPU lidar data can be obtained as:
-
sensor_msgs/msg/LaserScan, through theros_gz_bridge -
sensor_msgs/msg/PointCloud2, through theros_gz_bridgeorros_gz_point_cloud
Using the bridge:
ros2 launch ros_gz_sim_demos gpu_lidar_bridge.launch.py
TODO: Blocked by ros_gz_point_cloud issue.
Using Gazebo Sim plugin:
ros2 launch ros_gz_sim_demos gpu_lidar.launch.py

IMU
Publishes IMU readings.
ros2 launch ros_gz_sim_demos imu.launch.py

TODO: IMU display missing for RViz2
Magnetometer
Publishes magnetic field readings.
ros2 launch ros_gz_sim_demos magnetometer.launch.py

GNSS
Publishes satellite navigation readings, only available in Fortress on.
ros2 launch ros_gz_sim_demos navsat.launch.py

RGBD camera
RGBD camera data can be obtained as:
-
sensor_msgs/msg/Image, throughros_gz_bridgeorros_gz_image -
sensor_msgs/msg/PointCloud2, throughros_gz_bridgeorros_gz_point_cloud
Using the image bridge (unidirectional, uses image_transport):
# RGB image
ros2 launch ros_gz_sim_demos image_bridge.launch.py image_topic:=/rgbd_camera/image
# Depth image
ros2 launch ros_gz_sim_demos image_bridge.launch.py image_topic:=/rgbd_camera/depth_image
Using the regular bridge:
ros2 launch ros_gz_sim_demos rgbd_camera_bridge.launch.py
TODO: Blocked by ros_gz_point_cloud issue.
Using Gazebo Sim plugin:
ros2 launch ros_gz_sim_demos rgbd_camera.launch.py

Battery
Get the current state of a battery.
ros2 launch ros_gz_sim_demos battery.launch.py
Then send a command so the vehicle moves and drains the battery
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"

Robot description publisher
Leverage the robot description publisher to spawn a new urdf model in gazebo and show it in rviz2. To try the demo launch:
ros2 launch ros_gz_sim_demos robot_description_publisher.launch.py

Joint States Publisher
Publishes joint states of the robot.
To try the demo launch:
ros2 launch ros_gz_sim_demos joint_states.launch.py

Bridging joint state and pose publishers
The launch file demonstrates bridging Gazebo poses to TFMessage to visualize the pose and transforms of a robot in rviz.
To try the demo launch:
ros2 launch ros_gz_sim_demos tf_bridge.launch.py

Changelog for package ros1_gz_sim_demos
1.0.5 (2024-10-14)
1.0.4 (2024-08-29)
1.0.3 (2024-07-22)
1.0.2 (2024-07-03)
- Prepare for 1.0.0 Release (#495)
- Use gz_vendor packages (#531)
- [backport Humble] Create bridge for GPSFix msg (#316) (#538) Co-authored-by: Rousseau Vincent <<vincentrou@gmail.com>>
- [backport Iron] Create bridge for GPSFix msg (#316) (#537) Co-authored-by: Rousseau Vincent <<vincentrou@gmail.com>>
- 0.244.14
- Changelog
- 0.244.13
- Changelog
- Remove deprecations using ros_gz_sim_create (#476)
- 0.244.12
- Changelog
- 0.246.0
- Update changelogs
- Added more topic to the bridge (#422)
- Fix incorrect subscription on demo
(#405)
(#408) This PR
fixes an incorrect subscription on one of the demos. Running
` ros2 launch ros_gz_sim_demos gpu_lidar_bridge.launch.py[ causes rviz2 to crash and exit with the error: ]{.title-ref}rviz2-3] [rviz2-3] >>> [rcutils|error_handling.c:108] rcutils_set_error_state() [rviz2-3] This error state is being overwritten: [rviz2-3] [rviz2-3] 'create_subscription() called for existing topic name rt/lidar with incompatible type sensor_msgs::msg::dds\_::PointCloud2\_, at ./src/subscription.cpp:146, at ./src/rcl/subscription.c:108' [rviz2-3] [rviz2-3] with this new error message: [rviz2-3] [rviz2-3] 'invalid allocator, at ./src/rcl/subscription.c:218' [rviz2-3] [rviz2-3] rcutils_reset_error() should be called after error handling to avoid this.[ This is due to an incorrect subscription on the part of the demo. This PR fixes it by getting a subscription to the right topic for the pointcloud display. (`lidar/points]{.title-ref} instead of [lidar]{.title-ref}). Was tested on garden + humble. Co-authored-by: Arjo Chakravarty <<arjoc@intrinsic.ai>> - Port: humble to ros2 (#386)
- Merge branch 'humble' into mjcarroll/humble_to_ros2
- Update maintainers (#376)
- Rename 'ign gazebo' to 'gz sim' (#343)
- Create bridge for GPSFix msg (#316)
- Humble ➡️ ROS2 (#323) Humble ➡️ ROS2
- Merge branch 'humble' into ports/humble_to_ros2
- Fixed ros_gz_sim_demos launch files (#319)
- 0.245.0
- Changelog
- humble to ros2 (#311) Co-authored-by: Michael Carroll <<michael@openrobotics.org>>
- Merge remote-tracking branch 'origin/humble' into ahcorde/humble_to_ros2
- Remove all ignition references on ROS 2 branch
(#302)
- Remove all shims
- Update CMakeLists and package.xml for garden
- Complete garden gz renaming
- Drop fortress CI
- Contributors: Addisu Z. Taddese, Aditya Pande, Alejandro Hernández Cordero, Clyde McQueen, Jose Luis Rivero, Michael Carroll, Rousseau Vincent, ahcorde
1.0.0 (2024-04-24)
- Use gz_vendor packages (#531)
- Remove deprecations using ros_gz_sim_create (#476)
- Contributors: Addisu Z. Taddese, Alejandro Hernández Cordero
0.246.0 (2023-08-31)
- Added more topic to the bridge (#422)
- Fix incorrect subscription on demo (#405) (#408) Co-authored-by: Arjo Chakravarty <<arjoc@intrinsic.ai>>
- Port: humble to ros2 (#386)
- Merge branch 'humble' into mjcarroll/humble_to_ros2
- Update maintainers (#376)
- Rename 'ign gazebo' to 'gz sim' (#343)
- Create bridge for GPSFix msg (#316)
- Humble ➡️ ROS2 (#323)
- Fixed ros_gz_sim_demos launch files (#319)
- Contributors: Aditya Pande, Alejandro Hernández Cordero, Clyde McQueen, Michael Carroll, Rousseau Vincent, ahcorde
0.245.0 (2022-10-12)
- humble to ros2 (#311) Co-authored-by: Michael Carroll <<michael@openrobotics.org>>
- Merge remote-tracking branch 'origin/humble' into ahcorde/humble_to_ros2
- Remove all ignition references on ROS 2 branch
(#302)
- Remove all shims
- Update CMakeLists and package.xml for garden
- Complete garden gz renaming
- Drop fortress CI
- Contributors: Alejandro Hernández Cordero, Michael Carroll, ahcorde
0.244.10 (2023-05-03)
0.244.9 (2022-11-03)
0.244.8 (2022-10-28)
0.244.7 (2022-10-12)
- Merge pull request #275 (Galactic to Humble) Galactic to Humble
- Merge branch 'ros2' into ports/galactic_to_ros2
- Contributors: Michael Carroll
0.244.6 (2022-09-14)
0.244.5 (2022-09-12)
- sdformat_urdf parser demo
(#265)
- parser compatible model and launch framework
- added ground plane, common gz plugins, demo commands and cleaned install paths
- unique collision names and cleared flake
- updating model config
- building parser from source
- fix flake and update deb dependency for garden
- Move packages and files to gz
- feedback and ign->gz
* Support ros_ign migration Clean up shared libraries, and tick-tock RosGzPointCloud Tick-tock launch args Hard-tock ign_ in sources Migrate ign, ign_, IGN_ for sources, launch, and test files Migrate IGN_XXX_VER, IGN_T, header guards Migrate launchfile, launchfile args, and test source references Migrate ros_ign_XXX and gz_gazebo -> gz_sim Migrate ros_ign_XXX project names Migrate Ign, ign-, IGN_DEPS, ign-gazebo Migrate ignitionrobotics, ignitionrobotics/ros_ign, osrf/ros_ign Migrate ignition-version, IGNITION_VERSION, Ignition <LIB>, ros_ign_ci
- renaming and flake
- added ros commands
- gz-version
- feedback and ci trial
* removing garden condition Co-authored-by: Michael Carroll <<michael@openrobotics.org>> Co-authored-by: methylDragon <<methylDragon@gmail.com>> Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Support ros_ign migration (#282) Clean up shared libraries, and tick-tock RosGzPointCloud Tick-tock launch args Hard-tock ign_ in sources Migrate ign, ign_, IGN_ for sources, launch, and test files Migrate IGN_XXX_VER, IGN_T, header guards Migrate launchfile, launchfile args, and test source references Migrate ros_ign_XXX and gz_gazebo -> gz_sim Migrate ros_ign_XXX project names Migrate Ign, ign-, IGN_DEPS, ign-gazebo Migrate ignitionrobotics, ignitionrobotics/ros_ign, osrf/ros_ign Migrate ignition-version, IGNITION_VERSION, Ignition <LIB>, ros_ign_ci
- Move packages and files to gz (#282)
- Contributors: Dharini Dutia, methylDragon
0.244.3 (2022-05-19)
- [ros2] README updates (service bridge, Gazebo rename) (#252)
- Fix linter tests (#251) Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
-
Joint state publisher and tf bridging demo (#244) * Added joint state publisher and tf bridge demo Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Contributors: Aditya Pande, Daisuke Nishimatsu, Louise Poubel
0.244.2 (2022-04-25)
- Camera trigger demo (#223)
- Separate galactic branch from ros2 branch (#201)
- 🏁 Dome EOL (#198)
- Joint states tutorial (#156) Adds an rrbot model to demos and shows the usage of joint_states plugin.
- Contributors: Louise Poubel, Michael Carroll, Vatan Aksoy Tezer, William Lew
0.244.1 (2022-01-04)
0.244.0 (2021-12-30)
- Default to Fortress for Rolling (future Humble) (#195)
- [ros2] 🏁 Dome EOL (#199)
- Enable QoS overrides (#181)
- Contributors: Guillaume Doisy, Louise Poubel
0.233.2 (2021-07-20)
- [ros2] Add exec depend on xacro for demos (#170)
- [ros2] Update version docs, add Galactic and Fortress (#164)
- Joint states tutorial (#156) Adds an rrbot model to demos and shows the usage of joint_states plugin.
- Contributors: Louise Poubel, Vatan Aksoy Tezer
0.233.1 (2021-04-16)
- Default to Edifice for Rolling (#150)
- Minor updates for demos
(#144)
- Re-enable air pressure demo
- Resolves https://github.com/gazebosim/ros_gz/issues/78
- Add RQt topic viewer to IMU demo
- Add image_topic argument for image_bridge demo
- Do not normalize depth image in RViz2
- Edifice support (#140)
- Add topic flag to create robot (#128) Now it is possible to run ros_gz_sim create specifying a topic as source of the robot description Add a launch file starting a ignition gazebo world and spawn a sphere in it. Additionally a rviz2 interface is loaded to show that also Rviz can load the robot description The newly created demo introduce a dependency on the robot_state_publisher package
- [ros2] Update releases (#108)
- Contributors: Andrej Orsula, Louise Poubel, Valerio Magnago
0.221.1 (2020-08-19)
0.221.0 (2020-07-23)
- Updated launch file to use ros_gz_sim (#82) Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Use new ros_gz_sim package on ROS 2 demos (#85) Co-authored-by: Alejandro Hernández Cordero <<ahcorde@gmail.com>>
- [WIP] Port ign_ros_gazebo_demos to ROS2 (#58) Port ros_gz_image to ROS2 Port ros_gz_sim_demos to ROS2
- Enable ROS2 CI for Dashing branch (#43)
- Make all API and comments ROS-version agnostic
- Rename packages and fix compilation + tests
- Move files ros1 -> ros
- Contributors: Alejandro Hernández Cordero, Jose Luis Rivero, Louise Poubel, chapulina
0.7.0 (2019-08-15)
0.6.3 (2019-08-04)
0.6.2 (2019-08-04)
0.6.1 (2019-08-04)
0.6.0 (2019-08-02)
- Image bridge using image_transport
(#34)
- Image bridge using image_transport
- tests for image
- correct metapackage
* tests with catkin Signed-off-by: Louise Poubel <<louise@openrobotics.org>> * Revert changes from #32 Signed-off-by: Louise Poubel <<louise@openrobotics.org>>
- Revert "Pointcloud bridge demo for depth camera" This reverts commit 094cd40f21aed734d59c204172ad5afd7a26c8d6.
- Pointcloud bridge demo for depth camera
- Contributors: Louise Poubel, chapulina
- 0.5.0
- Battery state (#30)
- Packed demo
(#29)
- adding demo for point cloud packed bridge
- correct rviz file
- RGBD bridged cloud demo
- Merge pull request #28 from osrf/pointcloudpacked Bridge point cloud packed
- Contributors: Nate Koenig, chapulina
- Battery state (#30)
- Packed demo
(#29)
- adding demo for point cloud packed bridge
- correct rviz file
- RGBD bridged cloud demo
- Merge pull request #28 from osrf/pointcloudpacked Bridge point cloud packed
- Contributors: Nate Koenig, chapulina
0.4.0 (2019-07-16)
0.3.1 (2019-07-01)
- Merge pull request #24 from osrf/fix_dep ignition-gazebo2 needed at build time
- ignition-gazebo2 needed at build time
- Contributors: Jose Luis Rivero
0.3.0 (2019-06-28)
- 0.2.0
- Merge pull request #21 from osrf/lidar Point clouds from lidars
- Conversion between nav_msgs/Odometry and ignition::msgs::Odometry
(#22)
- Conversion between nav_msgs/Odometry and ignition::msgs::Odometry.
- Update documentation.
- More time to run tests
- Cleaning test_utils.
- Remove explicit ROS dependencies for Travis.
- diff drive demo with cmd_vel and odom
- process child frame id
- final tweaks
- PC2 for gpu_lidar, 1 vertical sample
- Start of lidar PC
- Fluid pressure
(#20)
- screenshots
- missing IMU
- Fluid pressure
- Fix tests.
- Demos package
(#19)
- Start of demos package: camera
- IMU
- depth camera
- magnetometer
- lidar, base launch
- READMEs, RGBD camera
- screenshots
- missing IMU
- set plugin path env
- It's best to always set it
- Contributors: Carlos Agüero, Nate Koenig, chapulina
0.2.2 (2019-05-20)
0.2.1 (2019-05-11)
0.2.0 (2019-05-09)
0.1.0 (2019-03-20)
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| desktop_full | |
| ros_gz |
Launch files
Messages
Services
Plugins
Recent questions tagged ros_gz_sim_demos at Robotics Stack Exchange
|
|
ros_gz_sim_demos package from ros_gz reporos_gz ros_gz_bridge ros_gz_image ros_gz_interfaces ros_gz_point_cloud ros_gz_sim ros_gz_sim_demos test_ros_gz_bridge |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.1.1 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/gazebosim/ros_gz.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2024-10-17 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Aditya Pande
- Alejandro Hernandez
Authors
- Louise Poubel
ROS + Gazebo Sim demos
This package contains demos showing how to use Gazebo Sim with ROS.
Run Gazebo Sim
There’s a convenient launch file, try for example:
ros2 launch ros_gz_sim gz_sim.launch.py gz_args:="shapes.sdf"

Air pressure
Publishes fluid pressure readings.
ros2 launch ros_gz_sim_demos air_pressure.launch.py
This demo also shows the use of custom QoS parameters. The sensor data is published as as “best-effort”, so trying to subscribe to “reliable” data won’t work. See the difference between:
ros2 topic echo /air_pressure --qos-reliability best_effort
And
ros2 topic echo /air_pressure --qos-reliability reliable

Camera
Publishes RGB camera image and info.
Images can be exposed to ROS through ros_gz_bridge or ros_gz_image.
Using the image bridge (unidirectional, uses image_transport):
ros2 launch ros_gz_sim_demos image_bridge.launch.py
Using the regular bridge:
ros2 launch ros_gz_sim_demos camera.launch.py
To use a camera that only publishes information when triggered:
ros2 launch ros_gz_sim_demos triggered_camera.launch.py
Trigger the camera:
ros2 topic pub /camera/trigger std_msgs/msg/Bool "{data: true}" --once

Diff drive
Send commands to a differential drive vehicle and listen to its odometry.
ros2 launch ros_gz_sim_demos diff_drive.launch.py
Then unpause and send a command
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"
This demo also shows the use of custom QoS parameters. The commands are subscribed to as “reliable”, so trying to publish “best-effort” commands won’t work. See the difference between:
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.0}}" --qos-reliability reliable
And
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.0}}" --qos-reliability best_effort

Depth camera
Depth camera data can be obtained as:
-
sensor_msgs/msg/Image, throughros_gz_bridgeorros_gz_image -
sensor_msgs/msg/PointCloud2, throughros_gz_point_cloud
Using the image bridge (unidirectional, uses image_transport):
ros2 launch ros_gz_sim_demos image_bridge.launch.py image_topic:=/depth_camera
TODO: Blocked by ros_gz_point_cloud issue.
Using Gazebo Sim plugin:
ros2 launch ros_gz_sim_demos depth_camera.launch.py

GPU lidar
GPU lidar data can be obtained as:
-
sensor_msgs/msg/LaserScan, through theros_gz_bridge -
sensor_msgs/msg/PointCloud2, through theros_gz_bridgeorros_gz_point_cloud
Using the bridge:
ros2 launch ros_gz_sim_demos gpu_lidar_bridge.launch.py
TODO: Blocked by ros_gz_point_cloud issue.
Using Gazebo Sim plugin:
ros2 launch ros_gz_sim_demos gpu_lidar.launch.py

IMU
Publishes IMU readings.
ros2 launch ros_gz_sim_demos imu.launch.py

TODO: IMU display missing for RViz2
Magnetometer
Publishes magnetic field readings.
ros2 launch ros_gz_sim_demos magnetometer.launch.py

GNSS
Publishes satellite navigation readings, only available in Fortress on.
ros2 launch ros_gz_sim_demos navsat.launch.py

RGBD camera
RGBD camera data can be obtained as:
-
sensor_msgs/msg/Image, throughros_gz_bridgeorros_gz_image -
sensor_msgs/msg/PointCloud2, throughros_gz_bridgeorros_gz_point_cloud
Using the image bridge (unidirectional, uses image_transport):
# RGB image
ros2 launch ros_gz_sim_demos image_bridge.launch.py image_topic:=/rgbd_camera/image
# Depth image
ros2 launch ros_gz_sim_demos image_bridge.launch.py image_topic:=/rgbd_camera/depth_image
Using the regular bridge:
ros2 launch ros_gz_sim_demos rgbd_camera_bridge.launch.py
TODO: Blocked by ros_gz_point_cloud issue.
Using Gazebo Sim plugin:
ros2 launch ros_gz_sim_demos rgbd_camera.launch.py

Battery
Get the current state of a battery.
ros2 launch ros_gz_sim_demos battery.launch.py
Then send a command so the vehicle moves and drains the battery
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"

Robot description publisher
Leverage the robot description publisher to spawn a new urdf model in gazebo and show it in rviz2. To try the demo launch:
ros2 launch ros_gz_sim_demos robot_description_publisher.launch.py

Joint States Publisher
Publishes joint states of the robot.
To try the demo launch:
ros2 launch ros_gz_sim_demos joint_states.launch.py

Bridging joint state and pose publishers
The launch file demonstrates bridging Gazebo poses to TFMessage to visualize the pose and transforms of a robot in rviz.
To try the demo launch:
ros2 launch ros_gz_sim_demos tf_bridge.launch.py

Changelog for package ros1_gz_sim_demos
2.1.1 (2024-10-14)
2.1.0 (2024-09-12)
2.0.1 (2024-08-29)
2.0.0 (2024-07-22)
1.0.1 (2024-07-03)
- Prepare for 1.0.0 Release (#495)
- Use gz_vendor packages (#531)
- [backport Humble] Create bridge for GPSFix msg (#316) (#538) Co-authored-by: Rousseau Vincent <<vincentrou@gmail.com>>
- [backport Iron] Create bridge for GPSFix msg (#316) (#537) Co-authored-by: Rousseau Vincent <<vincentrou@gmail.com>>
- 0.244.14
- Changelog
- 0.244.13
- Changelog
- Remove deprecations using ros_gz_sim_create (#476)
- 0.244.12
- Changelog
- 0.246.0
- Update changelogs
- Added more topic to the bridge (#422)
- Fix incorrect subscription on demo
(#405)
(#408) This PR
fixes an incorrect subscription on one of the demos. Running
` ros2 launch ros_gz_sim_demos gpu_lidar_bridge.launch.py[ causes rviz2 to crash and exit with the error: ]{.title-ref}rviz2-3] [rviz2-3] >>> [rcutils|error_handling.c:108] rcutils_set_error_state() [rviz2-3] This error state is being overwritten: [rviz2-3] [rviz2-3] 'create_subscription() called for existing topic name rt/lidar with incompatible type sensor_msgs::msg::dds\_::PointCloud2\_, at ./src/subscription.cpp:146, at ./src/rcl/subscription.c:108' [rviz2-3] [rviz2-3] with this new error message: [rviz2-3] [rviz2-3] 'invalid allocator, at ./src/rcl/subscription.c:218' [rviz2-3] [rviz2-3] rcutils_reset_error() should be called after error handling to avoid this.[ This is due to an incorrect subscription on the part of the demo. This PR fixes it by getting a subscription to the right topic for the pointcloud display. (`lidar/points]{.title-ref} instead of [lidar]{.title-ref}). Was tested on garden + humble. Co-authored-by: Arjo Chakravarty <<arjoc@intrinsic.ai>> - Port: humble to ros2 (#386)
- Merge branch 'humble' into mjcarroll/humble_to_ros2
- Update maintainers (#376)
- Rename 'ign gazebo' to 'gz sim' (#343)
- Create bridge for GPSFix msg (#316)
- Humble ➡️ ROS2 (#323) Humble ➡️ ROS2
- Merge branch 'humble' into ports/humble_to_ros2
- Fixed ros_gz_sim_demos launch files (#319)
- 0.245.0
- Changelog
- humble to ros2 (#311) Co-authored-by: Michael Carroll <<michael@openrobotics.org>>
- Merge remote-tracking branch 'origin/humble' into ahcorde/humble_to_ros2
- Remove all ignition references on ROS 2 branch
(#302)
- Remove all shims
- Update CMakeLists and package.xml for garden
- Complete garden gz renaming
- Drop fortress CI
- Contributors: Addisu Z. Taddese, Aditya Pande, Alejandro Hernández Cordero, Clyde McQueen, Jose Luis Rivero, Michael Carroll, Rousseau Vincent, ahcorde
1.0.0 (2024-04-24)
- Use gz_vendor packages (#531)
- Remove deprecations using ros_gz_sim_create (#476)
- Contributors: Addisu Z. Taddese, Alejandro Hernández Cordero
0.246.0 (2023-08-31)
- Added more topic to the bridge (#422)
- Fix incorrect subscription on demo (#405) (#408) Co-authored-by: Arjo Chakravarty <<arjoc@intrinsic.ai>>
- Port: humble to ros2 (#386)
- Merge branch 'humble' into mjcarroll/humble_to_ros2
- Update maintainers (#376)
- Rename 'ign gazebo' to 'gz sim' (#343)
- Create bridge for GPSFix msg (#316)
- Humble ➡️ ROS2 (#323)
- Fixed ros_gz_sim_demos launch files (#319)
- Contributors: Aditya Pande, Alejandro Hernández Cordero, Clyde McQueen, Michael Carroll, Rousseau Vincent, ahcorde
0.245.0 (2022-10-12)
- humble to ros2 (#311) Co-authored-by: Michael Carroll <<michael@openrobotics.org>>
- Merge remote-tracking branch 'origin/humble' into ahcorde/humble_to_ros2
- Remove all ignition references on ROS 2 branch
(#302)
- Remove all shims
- Update CMakeLists and package.xml for garden
- Complete garden gz renaming
- Drop fortress CI
- Contributors: Alejandro Hernández Cordero, Michael Carroll, ahcorde
0.244.10 (2023-05-03)
0.244.9 (2022-11-03)
0.244.8 (2022-10-28)
0.244.7 (2022-10-12)
- Merge pull request #275 (Galactic to Humble) Galactic to Humble
- Merge branch 'ros2' into ports/galactic_to_ros2
- Contributors: Michael Carroll
0.244.6 (2022-09-14)
0.244.5 (2022-09-12)
- sdformat_urdf parser demo
(#265)
- parser compatible model and launch framework
- added ground plane, common gz plugins, demo commands and cleaned install paths
- unique collision names and cleared flake
- updating model config
- building parser from source
- fix flake and update deb dependency for garden
- Move packages and files to gz
- feedback and ign->gz
* Support ros_ign migration Clean up shared libraries, and tick-tock RosGzPointCloud Tick-tock launch args Hard-tock ign_ in sources Migrate ign, ign_, IGN_ for sources, launch, and test files Migrate IGN_XXX_VER, IGN_T, header guards Migrate launchfile, launchfile args, and test source references Migrate ros_ign_XXX and gz_gazebo -> gz_sim Migrate ros_ign_XXX project names Migrate Ign, ign-, IGN_DEPS, ign-gazebo Migrate ignitionrobotics, ignitionrobotics/ros_ign, osrf/ros_ign Migrate ignition-version, IGNITION_VERSION, Ignition <LIB>, ros_ign_ci
- renaming and flake
- added ros commands
- gz-version
- feedback and ci trial
* removing garden condition Co-authored-by: Michael Carroll <<michael@openrobotics.org>> Co-authored-by: methylDragon <<methylDragon@gmail.com>> Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Support ros_ign migration (#282) Clean up shared libraries, and tick-tock RosGzPointCloud Tick-tock launch args Hard-tock ign_ in sources Migrate ign, ign_, IGN_ for sources, launch, and test files Migrate IGN_XXX_VER, IGN_T, header guards Migrate launchfile, launchfile args, and test source references Migrate ros_ign_XXX and gz_gazebo -> gz_sim Migrate ros_ign_XXX project names Migrate Ign, ign-, IGN_DEPS, ign-gazebo Migrate ignitionrobotics, ignitionrobotics/ros_ign, osrf/ros_ign Migrate ignition-version, IGNITION_VERSION, Ignition <LIB>, ros_ign_ci
- Move packages and files to gz (#282)
- Contributors: Dharini Dutia, methylDragon
0.244.3 (2022-05-19)
- [ros2] README updates (service bridge, Gazebo rename) (#252)
- Fix linter tests (#251) Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
-
Joint state publisher and tf bridging demo (#244) * Added joint state publisher and tf bridge demo Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Contributors: Aditya Pande, Daisuke Nishimatsu, Louise Poubel
0.244.2 (2022-04-25)
- Camera trigger demo (#223)
- Separate galactic branch from ros2 branch (#201)
- 🏁 Dome EOL (#198)
- Joint states tutorial (#156) Adds an rrbot model to demos and shows the usage of joint_states plugin.
- Contributors: Louise Poubel, Michael Carroll, Vatan Aksoy Tezer, William Lew
0.244.1 (2022-01-04)
0.244.0 (2021-12-30)
- Default to Fortress for Rolling (future Humble) (#195)
- [ros2] 🏁 Dome EOL (#199)
- Enable QoS overrides (#181)
- Contributors: Guillaume Doisy, Louise Poubel
0.233.2 (2021-07-20)
- [ros2] Add exec depend on xacro for demos (#170)
- [ros2] Update version docs, add Galactic and Fortress (#164)
- Joint states tutorial (#156) Adds an rrbot model to demos and shows the usage of joint_states plugin.
- Contributors: Louise Poubel, Vatan Aksoy Tezer
0.233.1 (2021-04-16)
- Default to Edifice for Rolling (#150)
- Minor updates for demos
(#144)
- Re-enable air pressure demo
- Resolves https://github.com/gazebosim/ros_gz/issues/78
- Add RQt topic viewer to IMU demo
- Add image_topic argument for image_bridge demo
- Do not normalize depth image in RViz2
- Edifice support (#140)
- Add topic flag to create robot (#128) Now it is possible to run ros_gz_sim create specifying a topic as source of the robot description Add a launch file starting a ignition gazebo world and spawn a sphere in it. Additionally a rviz2 interface is loaded to show that also Rviz can load the robot description The newly created demo introduce a dependency on the robot_state_publisher package
- [ros2] Update releases (#108)
- Contributors: Andrej Orsula, Louise Poubel, Valerio Magnago
0.221.1 (2020-08-19)
0.221.0 (2020-07-23)
- Updated launch file to use ros_gz_sim (#82) Co-authored-by: Louise Poubel <<louise@openrobotics.org>>
- Use new ros_gz_sim package on ROS 2 demos (#85) Co-authored-by: Alejandro Hernández Cordero <<ahcorde@gmail.com>>
- [WIP] Port ign_ros_gazebo_demos to ROS2 (#58) Port ros_gz_image to ROS2 Port ros_gz_sim_demos to ROS2
- Enable ROS2 CI for Dashing branch (#43)
- Make all API and comments ROS-version agnostic
- Rename packages and fix compilation + tests
- Move files ros1 -> ros
- Contributors: Alejandro Hernández Cordero, Jose Luis Rivero, Louise Poubel, chapulina
0.7.0 (2019-08-15)
0.6.3 (2019-08-04)
0.6.2 (2019-08-04)
0.6.1 (2019-08-04)
0.6.0 (2019-08-02)
- Image bridge using image_transport
(#34)
- Image bridge using image_transport
- tests for image
- correct metapackage
* tests with catkin Signed-off-by: Louise Poubel <<louise@openrobotics.org>> * Revert changes from #32 Signed-off-by: Louise Poubel <<louise@openrobotics.org>>
- Revert "Pointcloud bridge demo for depth camera" This reverts commit 094cd40f21aed734d59c204172ad5afd7a26c8d6.
- Pointcloud bridge demo for depth camera
- Contributors: Louise Poubel, chapulina
- 0.5.0
- Battery state (#30)
- Packed demo
(#29)
- adding demo for point cloud packed bridge
- correct rviz file
- RGBD bridged cloud demo
- Merge pull request #28 from osrf/pointcloudpacked Bridge point cloud packed
- Contributors: Nate Koenig, chapulina
- Battery state (#30)
- Packed demo
(#29)
- adding demo for point cloud packed bridge
- correct rviz file
- RGBD bridged cloud demo
- Merge pull request #28 from osrf/pointcloudpacked Bridge point cloud packed
- Contributors: Nate Koenig, chapulina
0.4.0 (2019-07-16)
0.3.1 (2019-07-01)
- Merge pull request #24 from osrf/fix_dep ignition-gazebo2 needed at build time
- ignition-gazebo2 needed at build time
- Contributors: Jose Luis Rivero
0.3.0 (2019-06-28)
- 0.2.0
- Merge pull request #21 from osrf/lidar Point clouds from lidars
- Conversion between nav_msgs/Odometry and ignition::msgs::Odometry
(#22)
- Conversion between nav_msgs/Odometry and ignition::msgs::Odometry.
- Update documentation.
- More time to run tests
- Cleaning test_utils.
- Remove explicit ROS dependencies for Travis.
- diff drive demo with cmd_vel and odom
- process child frame id
- final tweaks
- PC2 for gpu_lidar, 1 vertical sample
- Start of lidar PC
- Fluid pressure
(#20)
- screenshots
- missing IMU
- Fluid pressure
- Fix tests.
- Demos package
(#19)
- Start of demos package: camera
- IMU
- depth camera
- magnetometer
- lidar, base launch
- READMEs, RGBD camera
- screenshots
- missing IMU
- set plugin path env
- It's best to always set it
- Contributors: Carlos Agüero, Nate Koenig, chapulina
0.2.2 (2019-05-20)
0.2.1 (2019-05-11)
0.2.0 (2019-05-09)
0.1.0 (2019-03-20)
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| desktop_full | |
| ros_gz |