
|
jsk_network_tools package from jsk_common repoaudio_video_recorder jsk_common dynamic_tf_publisher jsk_data jsk_network_tools image_view2 multi_map_server jsk_rosbag_tools jsk_tilt_laser jsk_tools jsk_topic_tools virtual_force_publisher |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.16 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_common.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Yusuke Furuta
jsk_network_tools
Limited Network Communication.
The goal of silverhammer is to provide communication between two different ROS networks over limited network.
Currently jsk_network_tools supports two types of limited network model:
- Unidirectional and narrow network.
- Unidirectional and broad but intermittent network.
These two models are strongly inspired by DRC-final.
Problem of communication over limited network
The problems of ‘limited network’ are:
- narrow bandwidth
- intermittent connection
There problems cause following issues:
-
Hand-shaking is high cost.
Any kind of hand-shaking takes much time for example TCP hand-shaking and ROS node hand-shaking.
-
Re-sending is high cost.
Any kind of re-sending packets takes much time and consumes bandwidth for example TCP re-sending.
-
Re-connection is high cost.
Over intermittent connection, we need to re-connect over and over times. If bandwidth is narrow, hand-shaking is high cost mentioned above and re-connection is much high cost.
Because of these problems, we cannot use rich and well-designed communication tool such as ROS and ZMQ.
Approach towards communication over limited network
jsk_network_tools’ approach for the problems is quite simple.
- Use USP with fixed and periodic rate to remove hand-shaking of connection.
- For narrow band network, compress message as small as possible
- For broad band network, support rich and large message and separate them into smaller UDP packets.
- Our network model is streaming. jsk_network_tools provides
streamerandreceiver. - jsk_network_tools is designed to cooperate with ROS communication suite.
narrow network
jsk_network_tools provides silverhammer_lowspeed_streamer.py and silverhammer_lowspeed_receiver.py, which is
a gateway between two different ROS network over narrow network.
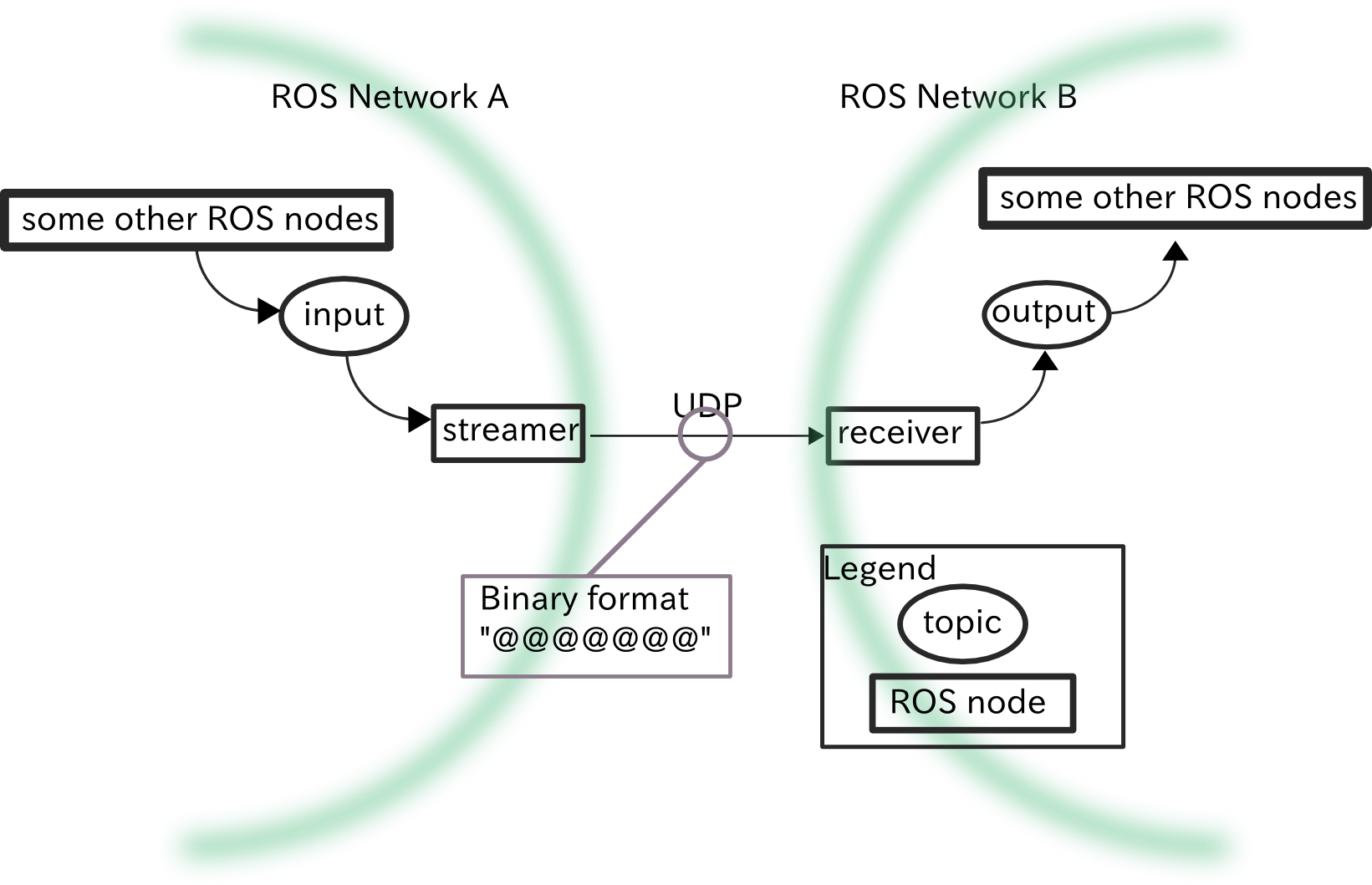
Features of silverhammer_lowspeed_{streamer,receiver}.py are:
- Use UDP prevent hand-shaking and re-sending.
Simply use UDP protocol with fixed rate.
- Serialize data into small binary format.
Automatically generate serialization format from definition of ROS message. However, this serialization only supports the simplest message definition. Limitation of the serialization are:
- No nested field is allowed. Only built-in types are supported.
- No variable length array and
stringare allowed. -
int8,durationandtimeare not supported.
silverhammer_lowspeed_gateway.py uses python struct module to serialize/deserialize messages.
- Input is one topic and output is also one topic.
In order to tucke against narrow bandwidth, we need to chose and compress transferred data. Therefore, input and output of streamer and receiver are limited to only one topic.
broad network
jsk_network_tools provides silverhammer_highspeed_streamer.py and
silverhammer_highspeed_receiver.py to achieve high-throughput over broadband network.
Features of silverhammer_lowspeed_{streamer,receiver}.py are:
- Use UDP prevent hand-shaking and re-sending.
Simply use UDP protocol with fixed rate.
- Serialize/Deserialize data using ROS serialization.
On this model, jsk_network_tools utilizes ROS serialization.
Only one limitation is that the types of the fields should be another
ROS type such as sensor_msgs/Image, geometry_msgs/Pose and so on.
-
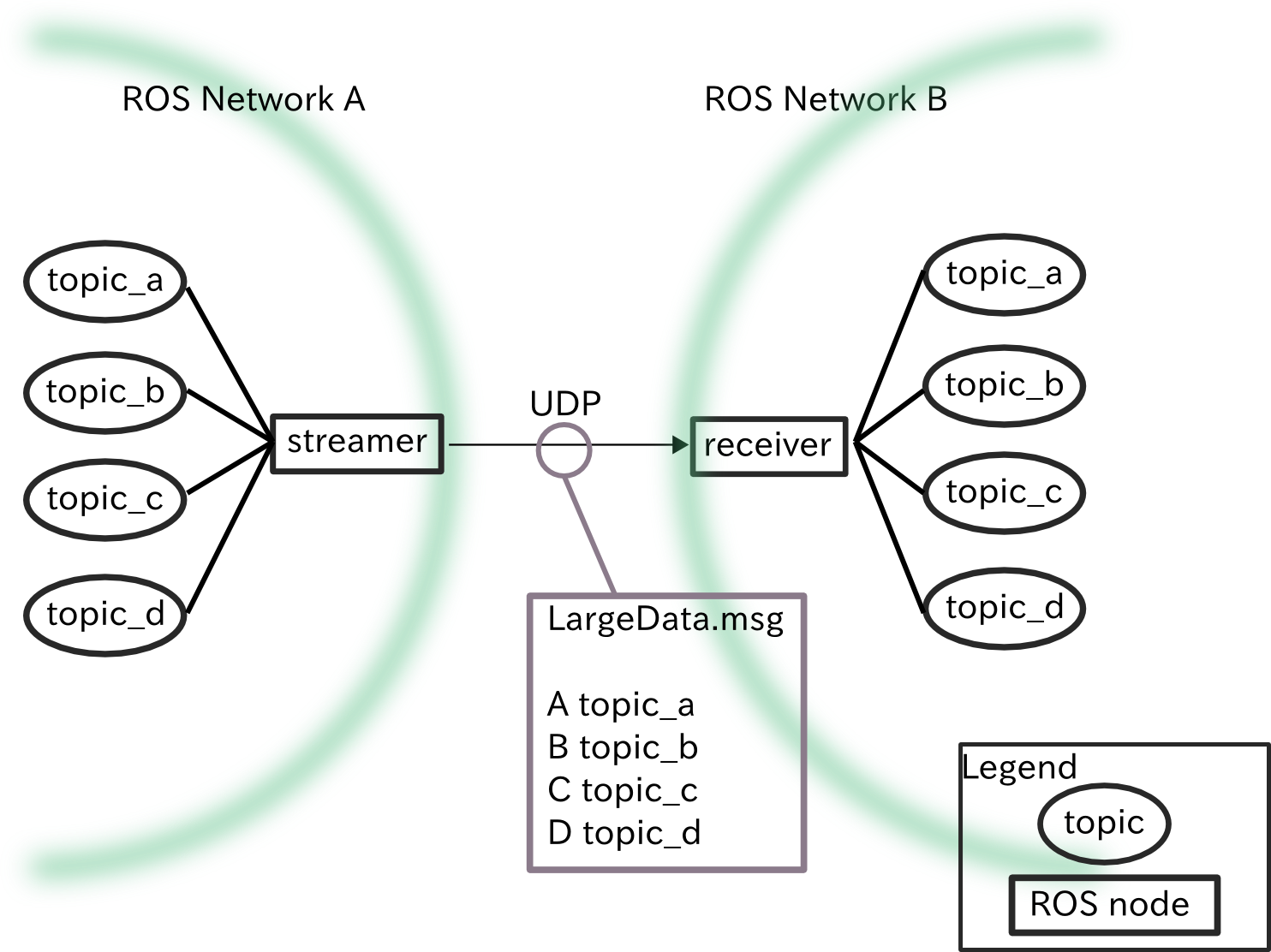
Split ROS message into small UDP packets and collect them into ROS message.
-
Input and output are multiple-topics.
The topics which streamer subscribes and receiver publishes are automatically decided according to definition of FC2OCSLargeData.msg.
The rule is simple:
Each field name represents topic name and
__(double under scores) is replaced by/.
For example, you want to tranfer /camera/rgb/image_rect topic, your message should have
following field definition.
sensor_msgs/Image camera__rgb__image_rect
Streamer automatically split one big data into small UDP packets. Receiver collects the packets and re-publish the messages to the topics.
Format of the UDP packet is:
+--------+-----------+------------+-----------------+
| Seq Id | Packet Id | Packet Num | Data ... |
+--------+-----------+------------+-----------------+
| 4B | 4B | 4B | |
|<-------------------Staic Size--------------------->
-
Seq Id
Sequence Id. This is incremented when streamer sends new ROS message.
-
Packet Id
It is incremented when streamer sends new packet.
-
Packet Num
The number of the packets for receiver to decode packets.
Software manual
silverhammer_lowspeed_streamer.py
Subscribing Topics
-
~inputType of
~inputtopic is specified by~messageparameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCS)ROS message type to send over UDP. It should follow limitation of message definition described above.
-
~to_port(default:1024) -
~to_ip(default:127.0.0.1)Port number and hostname to send message.
-
~send_rate(default:1)Fixed rate in Hz to send message.
-
~event_driven(default:False)Streamer sends UDP packet immediately
~inputtopic is published.silverhammer_lowspeed_receiver.pyPublishing Topics
-
~outputType of
~outputtopic is specified by~messageparameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCS)ROS message type to receive over UDP. It should follow limitation of message definition described above.
-
~receive_port(default:1024) -
~receive_ip(default:127.0.0.1)Port number and hostname to receive message.
-
~receive_buffer_sizeBuffer size to receive UDP packet.
silverhammer_highspeed_streamer.py
Subscribing Topics
Input topics are automatically determined by message definition specified
by ~message parameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCSLargeData)ROS message type to send over UDP. It should follow limitation of message definition described above.
-
~to_port(default:16484) -
~to_ip(default:localhost)Port number and hostname to send message.
-
~send_rate(default:2)Fixed rate in Hz to send message.
-
~packet_size(default:12000)Packet size of UDP. ROS message will be splitted into the packets of
~packet_size. Unit is byte. -
~packet_interval(default:0.001)Interval between sending each packet to avoid consume large amount of bandwidth.
silverhammer_highspeed_receiver.py
Publishing Topics
output topics are automatically determined by message definition specified
by ~message parameter and ~topic_prefix parameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCSLargeData)ROS message type to receive over UDP. It should follow limitation of message definition described above.
-
~receive_port(default:16484) -
~receive_ip(default:localhost)Port number and hostname to receive message.
-
~packet_size(default:1000)Packet size of UDP.
-
~topic_prefix(default:/from_fc)Prefix added in front of output topics.
-
~pesimistic(dfeault:False)Do not concatenate packets with 0 filling if this parameter is True.
Changelog for package jsk_network_tools
2.2.16 (2025-01-06)
2.2.15 (2024-12-13)
2.2.14 (2024-12-12)
- remove use_source_permissions to fix build error
(#1805)
- use catkin_install_python to install python scripts
- Contributors: Yoshiki Obinata
2.2.13 (2023-11-09)
- add test to compile on 22.04, see
#1770
(#1773)
- use setuptools setup from distutils is deprecated and will be removed eventually.
- Fixed typo of Software License Agreement. and/o2r to and/or (#1764) Fixed typo of Software License Agreement. and/o2r to and/or
- Contributors: Kei Okada, Shingo Kitagawa, Iory Yanokura, v4hn
2.2.12 (2022-06-07)
- add skip_interfaces param in network_status.py (#1664)
- Contributors: Shingo Kitagawa
2.2.11 (2020-07-10)
- Fix for noetic buid
(#1648)
- fix jsk_network_tools for python3
- jsk_network_tools: set queue_size=1
- fix for python3, except, print .…
- upgrade package.xml to format=3
- [network_status.py] add queue_size (#1642)
- Contributors: Kei Okada, Naoki Hiraoka, Shingo Kitagawa
2.2.10 (2018-11-03)
2.2.9 (2018-11-02)
2.2.8 (2018-11-01)
- Install missing launch/ and test/ as well (#1604)
- Contributors: Yuto Uchimi
2.2.7 (2018-06-27)
2.2.6 (2018-01-05)
- Fix warning about %d vs %lu in silverhammer_highspeed_internal_receiver (#1537)
- Contributors: Kentaro Wada
2.2.5 (2017-06-19)
2.2.4 (2017-06-14)
2.2.3 (2017-03-23)
2.2.2 (2016-12-30)
2.2.1 (2016-12-13)
2.2.0 (2016-10-28)
2.1.2 (2016-09-14)
2.1.1 (2016-09-07)
2.1.0 (2016-09-06)
- [jsk_network_tools] add wifi_status.py (https://github.com/jsk-ros-pkg/jsk_common/pull/1448)
- Contributors: Yuki Furuta
2.0.17 (2016-07-21)
2.0.16 (2016-06-19)
2.0.15 (2016-06-13)
2.0.14 (2016-05-14)
2.0.13 (2016-04-29)
2.0.12 (2016-04-18)
2.0.11 (2016-03-20)
- remove dynamic_reconfigure.parameter_generator, which only used for rosbuild
- Contributors: Kei Okada
2.0.10 (2016-02-13)
- Update maintainer of jsk_network_tools and jsk_topic_tools
- Contributors: Ryohei Ueda
2.0.9 (2015-12-14)
2.0.8 (2015-12-07)
2.0.7 (2015-12-05)
2.0.6 (2015-12-02)
2.0.5 (2015-11-30)
2.0.4 (2015-11-25)
- [jsk_network_tools] Disable test
- [jsk_network_tools] Do not run rostest unless CATKIN_ENABLE_TESTING is false
- [jsk_topic_tools] Add name attribute to test node
- [jsk_network_tools] Depends on roscpp and rospy
- [jsk_network_tools/silverhammer_highspeed_internal_receiver] Chop msg.data length to actual received size
- [jsk_network_tools] Update last_received_seq_id correctly at first time
- [jsk_network_tools] Add kbps and mbps unit to network_status
- [jsk_network_tools] Add ${hostname}/nonlocal/{receive, transmit} topics to accumurate all the communication amount except for localhost
- [jsk_network_tools] Add C++ implementation of silverhammer_highspeed_receiver. It cooperates with python thin wrapper and bridged via ros between them.
- Contributors: Ryohei Ueda
2.0.3 (2015-07-24)
2.0.2 (2015-07-07)
- [jsk_topic_tools] Check ROS original message size in silverhammer_lowspeed_check_size
- [jsk_network_tools] Remove euslisp code from jsk_network_tools to resolve distorted dependency
- [jsk_network_tools] Publish under hostname prefix in network_status.py
- Contributors: Ryohei Ueda
2.0.1 (2015-06-28)
2.0.0 (2015-06-19)
1.0.72 (2015-06-07)
- [jsk_network_tools] add bandwidth/rate checker for lowspeed
- [jsk_network_tools] add pub_rate param for test
- [jsk_network_tools] use service request instead of reloading param to set send_rate
- [jsk_network_tools] use float to avoid zero-division error instead of int
- [jsk_network_tools] add SetSendRate.srv
- [jsk_network_tools/silverhammer_lowspeed_streamer.py] add service for setting send_rate
- [jsk_network_tools] bugfix: fix rmem_max value; set bash option to check command executed successfly
- [jsk_network_tools] Use loginfo instead of logwarn in silverhammre highspeed receiver
- [jsk_network_tools] Update for synchronized topic
- [jsk_network_tools] Add jaxon_red to joint-states-compressor.l
- [jsk_network_tools] Synchronize timestamp
- [jsk_network_tools/silverhammer_highspeed_receiver.py] ensure terminate multiprocess
- [jsk_network_tools] Update timestamp in highspeed receiver if specified
- [jsk_network_tools] publish time information from silverhammer streamers
- [jsk_network_tools] check/fix udp buffer size when launches silverhammer_highspeed_receiver.py
- [jsk_network_tools] add shell script to expand udp receive buffer
- Contributors: Yuki Furuta, Ryohei Ueda
1.0.71 (2015-05-17)
- [jsk_network_tools] use multiprocess on silverhammer receiver
- [jsk_network_tools/silverhammer_lowspeed_receiver] Force to disable timeout
- [jsk_network_tools] add wireshark plugin for silverhammer udp protocol
- Contributors: Yuki Furuta, Ryohei Ueda
1.0.70 (2015-05-08)
- [jsk_network_tools] Fix bytes/bits conversions
- Contributors: Ryohei Ueda
1.0.69 (2015-05-05)
1.0.68 (2015-05-05)
- [jsk_network_tools] Use 1500*8 bits as default packet_size for MTU:=1500 environment in silverhammer_highspeed communication
- Contributors: Ryohei Ueda
1.0.67 (2015-05-03)
- [angle-vector-compress.l] 360-mode input of 0 will return 0
- [angle-vector-compress.l] add debug code (but commented out for now)
- [jsk_network_tools] Use ~robot parameter and it's initialized to ROBOT environment variable
- [jsk_network_tools/test/launch_joint_state_compressor.xml] set ROBOT environment for test (and this should be removed), see https://github.com/jsk-ros-pkg/jsk_common/commit/39089ecfc793ac655d45552545ddc13c1fe87b09#commitcomment-10899961
- load environment variable for setting robot in joint-state-compressor.l
- [jsk_network_tools] add test for angle-vector/JointStates compress
- [jsk_network_tools] Including pr2_description/upload_pr2.launch in order to set /robot_description
- [jsk_network_tools] Support jaxon in compressing/decompressing angle-vector
- Contributors: Yuki Furuta, Kei Okada, Masaki Murooka, Ryohei Ueda
1.0.66 (2015-04-03)
1.0.65 (2015-04-02)
- [jsk_network_tools] Support effort in joint state compressor/decompressor
- [jsk_network_tools] Latch output topic of highspeed receiver
- [jsk_network_tools] More readable warning about packet miss
- [jsk_network_tools] Add new parameter ~packet_sleep_sum not to sleep per one packet but several packets
- Contributors: Ryohei Ueda
1.0.64 (2015-03-29)
- [jsk_network_tools] Fix typos
- [jsk_network_tools] Add dynamic_reconfigure interface to specify bandwidth of highspeed streamer
- [jsk_network_tools] Defaults to 280 Mbps
- [jsk_network_tools] Decide interval between sending packets based on bandwidth
- [jsk_network_tools] Do not load unused robot models when compress/decompress joint_states
- [jsk_network_tools] Publish the last received time as std_msgs/Time from silverhammer receivers
- [jsk_network_tools] Force to be within 0-255 when compressing joint angles
- [jsk_network_tools] Add diagnostics information to lowspeed streamer and receiver
- [jsk_network_tools] Add diagnostics information to highspeed streamer/receiver
- [jsk_network_tools] Add event_driven mode to lowspeed streamer
- [jsk_network_tools] Add event-driven mode to lowspeed streamer
- Contributors: Ryohei Ueda
1.0.63 (2015-02-19)
1.0.62 (2015-02-17)
- [jsk_network_tools] Add ~packet_interval to highspeed streamer to avoid consuming too much bandwidth
- [jsk_network_tools] latch output of joint-state-decompressor.l
- [jsk_network_tools] Support messages which has longer joints than robot model
- [jsk_network_tools] Publish the last time to send/receive messages
- Contributors: Ryohei Ueda
1.0.61 (2015-02-11)
- [jsk_network_tools] Enable unit test
- [jsk_network_tools] Add unittest about ROS<-->UDP message conversion
- [jsk_network_tools] Fix for uint32 data
- [jsk_network_tools] Fix how to resolve uint8 array
- [jsk_network_tools] Update sample of joint states compressor
- [jsk_network_tools] Fix compressing joint-angles of infinite joint
- Contributors: Ryohei Ueda
1.0.60 (2015-02-03)
1.0.59 (2015-02-03)
- [jsk_network_tools] Add euslisp script to compress/decompres joint states. Originally implemented in jsk_pr2_startup by Y.Furuta
- [jsk_topic_tools] Add pesimistic mode for highspeed receiver
- add param to set rate
- [jsk_network_tools] Support run silverhammer_highspeed_receiver.py without topic_prefix
- [jsk_network_tools] Add script to check size in lowspeed network
- [jsk_network_tools] Add openni2 sample for highspeed streaming using silverhammer toolkit and recover message if possible of missing packets
- [jsk_network_tools] use png images for documentation
- [jsk_network_tools] Simpler implementation of lowspeed communication and update document. Bang Bang!
- [jsk_network_tools] Add documentation about limited network communication
- [jsk_network_tools] Script for DRC-highspeed-link communication
- [jsk_network_tools] Fix typo: OSC -> OCS
- [jsk_network_tools] for Low-bandwidth environment, add silverhammer toolset. You can communicate between two ROS-neworks over low-bandwidth network like DRC final.
- Contributors: Ryohei Ueda, Yusuke Furuta
1.0.58 (2015-01-07)
1.0.57 (2014-12-23)
1.0.56 (2014-12-17)
- plot multiple lines
- add network plot
- Contributors: Yusuke Furuta
1.0.55 (2014-12-09)
- fix msg error in heartbeat
- add description
- add parameter to set hz
- Contributors: Yusuke Furuta
1.0.54 (2014-11-15)
1.0.53 (2014-11-01)
1.0.52 (2014-10-23)
1.0.51 (2014-10-20)
1.0.50 (2014-10-20)
1.0.49 (2014-10-13)
1.0.48 (2014-10-12)
1.0.47 (2014-10-08)
- Contributors: Yusuke Furuta
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| std_msgs | |
| message_generation | |
| sensor_msgs | |
| rostest | |
| diagnostic_msgs | |
| diagnostic_updater | |
| dynamic_reconfigure | |
| roscpp | |
| rospy | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_common | |
| jsk_tools |
Launch files
- test/silverhammer_lowspeed_load_test_fc.launch
- test/silverhammer_lowspeed_load_test_ocs.launch
- launch/simple_silverhammer_openni_sample.launch
- launch/simple_silverhammer_internal_buffer_openni_sample.launch
- launch/joint_state_compress_sample.launch
-
- Y_DIFF [default: 0]
- launch/wifi_status.launch
-
- network_interface [default: wlan0]
- warning_quality [default: 0.4]
- update_rate [default: 1.0]
- launch/simple_silverhammer_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_network_tools at Robotics Stack Exchange
|
|
jsk_network_tools package from jsk_common repoaudio_video_recorder jsk_common dynamic_tf_publisher jsk_data jsk_network_tools image_view2 multi_map_server jsk_rosbag_tools jsk_tilt_laser jsk_tools jsk_topic_tools virtual_force_publisher |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.16 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_common.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Yusuke Furuta
jsk_network_tools
Limited Network Communication.
The goal of silverhammer is to provide communication between two different ROS networks over limited network.
Currently jsk_network_tools supports two types of limited network model:
- Unidirectional and narrow network.
- Unidirectional and broad but intermittent network.
These two models are strongly inspired by DRC-final.
Problem of communication over limited network
The problems of ‘limited network’ are:
- narrow bandwidth
- intermittent connection
There problems cause following issues:
-
Hand-shaking is high cost.
Any kind of hand-shaking takes much time for example TCP hand-shaking and ROS node hand-shaking.
-
Re-sending is high cost.
Any kind of re-sending packets takes much time and consumes bandwidth for example TCP re-sending.
-
Re-connection is high cost.
Over intermittent connection, we need to re-connect over and over times. If bandwidth is narrow, hand-shaking is high cost mentioned above and re-connection is much high cost.
Because of these problems, we cannot use rich and well-designed communication tool such as ROS and ZMQ.
Approach towards communication over limited network
jsk_network_tools’ approach for the problems is quite simple.
- Use USP with fixed and periodic rate to remove hand-shaking of connection.
- For narrow band network, compress message as small as possible
- For broad band network, support rich and large message and separate them into smaller UDP packets.
- Our network model is streaming. jsk_network_tools provides
streamerandreceiver. - jsk_network_tools is designed to cooperate with ROS communication suite.
narrow network
jsk_network_tools provides silverhammer_lowspeed_streamer.py and silverhammer_lowspeed_receiver.py, which is
a gateway between two different ROS network over narrow network.
Features of silverhammer_lowspeed_{streamer,receiver}.py are:
- Use UDP prevent hand-shaking and re-sending.
Simply use UDP protocol with fixed rate.
- Serialize data into small binary format.
Automatically generate serialization format from definition of ROS message. However, this serialization only supports the simplest message definition. Limitation of the serialization are:
- No nested field is allowed. Only built-in types are supported.
- No variable length array and
stringare allowed. -
int8,durationandtimeare not supported.
silverhammer_lowspeed_gateway.py uses python struct module to serialize/deserialize messages.
- Input is one topic and output is also one topic.
In order to tucke against narrow bandwidth, we need to chose and compress transferred data. Therefore, input and output of streamer and receiver are limited to only one topic.
broad network
jsk_network_tools provides silverhammer_highspeed_streamer.py and
silverhammer_highspeed_receiver.py to achieve high-throughput over broadband network.
Features of silverhammer_lowspeed_{streamer,receiver}.py are:
- Use UDP prevent hand-shaking and re-sending.
Simply use UDP protocol with fixed rate.
- Serialize/Deserialize data using ROS serialization.
On this model, jsk_network_tools utilizes ROS serialization.
Only one limitation is that the types of the fields should be another
ROS type such as sensor_msgs/Image, geometry_msgs/Pose and so on.
-
Split ROS message into small UDP packets and collect them into ROS message.
-
Input and output are multiple-topics.
The topics which streamer subscribes and receiver publishes are automatically decided according to definition of FC2OCSLargeData.msg.
The rule is simple:
Each field name represents topic name and
__(double under scores) is replaced by/.
For example, you want to tranfer /camera/rgb/image_rect topic, your message should have
following field definition.
sensor_msgs/Image camera__rgb__image_rect
Streamer automatically split one big data into small UDP packets. Receiver collects the packets and re-publish the messages to the topics.
Format of the UDP packet is:
+--------+-----------+------------+-----------------+
| Seq Id | Packet Id | Packet Num | Data ... |
+--------+-----------+------------+-----------------+
| 4B | 4B | 4B | |
|<-------------------Staic Size--------------------->
-
Seq Id
Sequence Id. This is incremented when streamer sends new ROS message.
-
Packet Id
It is incremented when streamer sends new packet.
-
Packet Num
The number of the packets for receiver to decode packets.
Software manual
silverhammer_lowspeed_streamer.py
Subscribing Topics
-
~inputType of
~inputtopic is specified by~messageparameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCS)ROS message type to send over UDP. It should follow limitation of message definition described above.
-
~to_port(default:1024) -
~to_ip(default:127.0.0.1)Port number and hostname to send message.
-
~send_rate(default:1)Fixed rate in Hz to send message.
-
~event_driven(default:False)Streamer sends UDP packet immediately
~inputtopic is published.silverhammer_lowspeed_receiver.pyPublishing Topics
-
~outputType of
~outputtopic is specified by~messageparameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCS)ROS message type to receive over UDP. It should follow limitation of message definition described above.
-
~receive_port(default:1024) -
~receive_ip(default:127.0.0.1)Port number and hostname to receive message.
-
~receive_buffer_sizeBuffer size to receive UDP packet.
silverhammer_highspeed_streamer.py
Subscribing Topics
Input topics are automatically determined by message definition specified
by ~message parameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCSLargeData)ROS message type to send over UDP. It should follow limitation of message definition described above.
-
~to_port(default:16484) -
~to_ip(default:localhost)Port number and hostname to send message.
-
~send_rate(default:2)Fixed rate in Hz to send message.
-
~packet_size(default:12000)Packet size of UDP. ROS message will be splitted into the packets of
~packet_size. Unit is byte. -
~packet_interval(default:0.001)Interval between sending each packet to avoid consume large amount of bandwidth.
silverhammer_highspeed_receiver.py
Publishing Topics
output topics are automatically determined by message definition specified
by ~message parameter and ~topic_prefix parameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCSLargeData)ROS message type to receive over UDP. It should follow limitation of message definition described above.
-
~receive_port(default:16484) -
~receive_ip(default:localhost)Port number and hostname to receive message.
-
~packet_size(default:1000)Packet size of UDP.
-
~topic_prefix(default:/from_fc)Prefix added in front of output topics.
-
~pesimistic(dfeault:False)Do not concatenate packets with 0 filling if this parameter is True.
Changelog for package jsk_network_tools
2.2.16 (2025-01-06)
2.2.15 (2024-12-13)
2.2.14 (2024-12-12)
- remove use_source_permissions to fix build error
(#1805)
- use catkin_install_python to install python scripts
- Contributors: Yoshiki Obinata
2.2.13 (2023-11-09)
- add test to compile on 22.04, see
#1770
(#1773)
- use setuptools setup from distutils is deprecated and will be removed eventually.
- Fixed typo of Software License Agreement. and/o2r to and/or (#1764) Fixed typo of Software License Agreement. and/o2r to and/or
- Contributors: Kei Okada, Shingo Kitagawa, Iory Yanokura, v4hn
2.2.12 (2022-06-07)
- add skip_interfaces param in network_status.py (#1664)
- Contributors: Shingo Kitagawa
2.2.11 (2020-07-10)
- Fix for noetic buid
(#1648)
- fix jsk_network_tools for python3
- jsk_network_tools: set queue_size=1
- fix for python3, except, print .…
- upgrade package.xml to format=3
- [network_status.py] add queue_size (#1642)
- Contributors: Kei Okada, Naoki Hiraoka, Shingo Kitagawa
2.2.10 (2018-11-03)
2.2.9 (2018-11-02)
2.2.8 (2018-11-01)
- Install missing launch/ and test/ as well (#1604)
- Contributors: Yuto Uchimi
2.2.7 (2018-06-27)
2.2.6 (2018-01-05)
- Fix warning about %d vs %lu in silverhammer_highspeed_internal_receiver (#1537)
- Contributors: Kentaro Wada
2.2.5 (2017-06-19)
2.2.4 (2017-06-14)
2.2.3 (2017-03-23)
2.2.2 (2016-12-30)
2.2.1 (2016-12-13)
2.2.0 (2016-10-28)
2.1.2 (2016-09-14)
2.1.1 (2016-09-07)
2.1.0 (2016-09-06)
- [jsk_network_tools] add wifi_status.py (https://github.com/jsk-ros-pkg/jsk_common/pull/1448)
- Contributors: Yuki Furuta
2.0.17 (2016-07-21)
2.0.16 (2016-06-19)
2.0.15 (2016-06-13)
2.0.14 (2016-05-14)
2.0.13 (2016-04-29)
2.0.12 (2016-04-18)
2.0.11 (2016-03-20)
- remove dynamic_reconfigure.parameter_generator, which only used for rosbuild
- Contributors: Kei Okada
2.0.10 (2016-02-13)
- Update maintainer of jsk_network_tools and jsk_topic_tools
- Contributors: Ryohei Ueda
2.0.9 (2015-12-14)
2.0.8 (2015-12-07)
2.0.7 (2015-12-05)
2.0.6 (2015-12-02)
2.0.5 (2015-11-30)
2.0.4 (2015-11-25)
- [jsk_network_tools] Disable test
- [jsk_network_tools] Do not run rostest unless CATKIN_ENABLE_TESTING is false
- [jsk_topic_tools] Add name attribute to test node
- [jsk_network_tools] Depends on roscpp and rospy
- [jsk_network_tools/silverhammer_highspeed_internal_receiver] Chop msg.data length to actual received size
- [jsk_network_tools] Update last_received_seq_id correctly at first time
- [jsk_network_tools] Add kbps and mbps unit to network_status
- [jsk_network_tools] Add ${hostname}/nonlocal/{receive, transmit} topics to accumurate all the communication amount except for localhost
- [jsk_network_tools] Add C++ implementation of silverhammer_highspeed_receiver. It cooperates with python thin wrapper and bridged via ros between them.
- Contributors: Ryohei Ueda
2.0.3 (2015-07-24)
2.0.2 (2015-07-07)
- [jsk_topic_tools] Check ROS original message size in silverhammer_lowspeed_check_size
- [jsk_network_tools] Remove euslisp code from jsk_network_tools to resolve distorted dependency
- [jsk_network_tools] Publish under hostname prefix in network_status.py
- Contributors: Ryohei Ueda
2.0.1 (2015-06-28)
2.0.0 (2015-06-19)
1.0.72 (2015-06-07)
- [jsk_network_tools] add bandwidth/rate checker for lowspeed
- [jsk_network_tools] add pub_rate param for test
- [jsk_network_tools] use service request instead of reloading param to set send_rate
- [jsk_network_tools] use float to avoid zero-division error instead of int
- [jsk_network_tools] add SetSendRate.srv
- [jsk_network_tools/silverhammer_lowspeed_streamer.py] add service for setting send_rate
- [jsk_network_tools] bugfix: fix rmem_max value; set bash option to check command executed successfly
- [jsk_network_tools] Use loginfo instead of logwarn in silverhammre highspeed receiver
- [jsk_network_tools] Update for synchronized topic
- [jsk_network_tools] Add jaxon_red to joint-states-compressor.l
- [jsk_network_tools] Synchronize timestamp
- [jsk_network_tools/silverhammer_highspeed_receiver.py] ensure terminate multiprocess
- [jsk_network_tools] Update timestamp in highspeed receiver if specified
- [jsk_network_tools] publish time information from silverhammer streamers
- [jsk_network_tools] check/fix udp buffer size when launches silverhammer_highspeed_receiver.py
- [jsk_network_tools] add shell script to expand udp receive buffer
- Contributors: Yuki Furuta, Ryohei Ueda
1.0.71 (2015-05-17)
- [jsk_network_tools] use multiprocess on silverhammer receiver
- [jsk_network_tools/silverhammer_lowspeed_receiver] Force to disable timeout
- [jsk_network_tools] add wireshark plugin for silverhammer udp protocol
- Contributors: Yuki Furuta, Ryohei Ueda
1.0.70 (2015-05-08)
- [jsk_network_tools] Fix bytes/bits conversions
- Contributors: Ryohei Ueda
1.0.69 (2015-05-05)
1.0.68 (2015-05-05)
- [jsk_network_tools] Use 1500*8 bits as default packet_size for MTU:=1500 environment in silverhammer_highspeed communication
- Contributors: Ryohei Ueda
1.0.67 (2015-05-03)
- [angle-vector-compress.l] 360-mode input of 0 will return 0
- [angle-vector-compress.l] add debug code (but commented out for now)
- [jsk_network_tools] Use ~robot parameter and it's initialized to ROBOT environment variable
- [jsk_network_tools/test/launch_joint_state_compressor.xml] set ROBOT environment for test (and this should be removed), see https://github.com/jsk-ros-pkg/jsk_common/commit/39089ecfc793ac655d45552545ddc13c1fe87b09#commitcomment-10899961
- load environment variable for setting robot in joint-state-compressor.l
- [jsk_network_tools] add test for angle-vector/JointStates compress
- [jsk_network_tools] Including pr2_description/upload_pr2.launch in order to set /robot_description
- [jsk_network_tools] Support jaxon in compressing/decompressing angle-vector
- Contributors: Yuki Furuta, Kei Okada, Masaki Murooka, Ryohei Ueda
1.0.66 (2015-04-03)
1.0.65 (2015-04-02)
- [jsk_network_tools] Support effort in joint state compressor/decompressor
- [jsk_network_tools] Latch output topic of highspeed receiver
- [jsk_network_tools] More readable warning about packet miss
- [jsk_network_tools] Add new parameter ~packet_sleep_sum not to sleep per one packet but several packets
- Contributors: Ryohei Ueda
1.0.64 (2015-03-29)
- [jsk_network_tools] Fix typos
- [jsk_network_tools] Add dynamic_reconfigure interface to specify bandwidth of highspeed streamer
- [jsk_network_tools] Defaults to 280 Mbps
- [jsk_network_tools] Decide interval between sending packets based on bandwidth
- [jsk_network_tools] Do not load unused robot models when compress/decompress joint_states
- [jsk_network_tools] Publish the last received time as std_msgs/Time from silverhammer receivers
- [jsk_network_tools] Force to be within 0-255 when compressing joint angles
- [jsk_network_tools] Add diagnostics information to lowspeed streamer and receiver
- [jsk_network_tools] Add diagnostics information to highspeed streamer/receiver
- [jsk_network_tools] Add event_driven mode to lowspeed streamer
- [jsk_network_tools] Add event-driven mode to lowspeed streamer
- Contributors: Ryohei Ueda
1.0.63 (2015-02-19)
1.0.62 (2015-02-17)
- [jsk_network_tools] Add ~packet_interval to highspeed streamer to avoid consuming too much bandwidth
- [jsk_network_tools] latch output of joint-state-decompressor.l
- [jsk_network_tools] Support messages which has longer joints than robot model
- [jsk_network_tools] Publish the last time to send/receive messages
- Contributors: Ryohei Ueda
1.0.61 (2015-02-11)
- [jsk_network_tools] Enable unit test
- [jsk_network_tools] Add unittest about ROS<-->UDP message conversion
- [jsk_network_tools] Fix for uint32 data
- [jsk_network_tools] Fix how to resolve uint8 array
- [jsk_network_tools] Update sample of joint states compressor
- [jsk_network_tools] Fix compressing joint-angles of infinite joint
- Contributors: Ryohei Ueda
1.0.60 (2015-02-03)
1.0.59 (2015-02-03)
- [jsk_network_tools] Add euslisp script to compress/decompres joint states. Originally implemented in jsk_pr2_startup by Y.Furuta
- [jsk_topic_tools] Add pesimistic mode for highspeed receiver
- add param to set rate
- [jsk_network_tools] Support run silverhammer_highspeed_receiver.py without topic_prefix
- [jsk_network_tools] Add script to check size in lowspeed network
- [jsk_network_tools] Add openni2 sample for highspeed streaming using silverhammer toolkit and recover message if possible of missing packets
- [jsk_network_tools] use png images for documentation
- [jsk_network_tools] Simpler implementation of lowspeed communication and update document. Bang Bang!
- [jsk_network_tools] Add documentation about limited network communication
- [jsk_network_tools] Script for DRC-highspeed-link communication
- [jsk_network_tools] Fix typo: OSC -> OCS
- [jsk_network_tools] for Low-bandwidth environment, add silverhammer toolset. You can communicate between two ROS-neworks over low-bandwidth network like DRC final.
- Contributors: Ryohei Ueda, Yusuke Furuta
1.0.58 (2015-01-07)
1.0.57 (2014-12-23)
1.0.56 (2014-12-17)
- plot multiple lines
- add network plot
- Contributors: Yusuke Furuta
1.0.55 (2014-12-09)
- fix msg error in heartbeat
- add description
- add parameter to set hz
- Contributors: Yusuke Furuta
1.0.54 (2014-11-15)
1.0.53 (2014-11-01)
1.0.52 (2014-10-23)
1.0.51 (2014-10-20)
1.0.50 (2014-10-20)
1.0.49 (2014-10-13)
1.0.48 (2014-10-12)
1.0.47 (2014-10-08)
- Contributors: Yusuke Furuta
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| std_msgs | |
| message_generation | |
| sensor_msgs | |
| rostest | |
| diagnostic_msgs | |
| diagnostic_updater | |
| dynamic_reconfigure | |
| roscpp | |
| rospy | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_common | |
| jsk_tools |
Launch files
- test/silverhammer_lowspeed_load_test_fc.launch
- test/silverhammer_lowspeed_load_test_ocs.launch
- launch/simple_silverhammer_openni_sample.launch
- launch/simple_silverhammer_internal_buffer_openni_sample.launch
- launch/joint_state_compress_sample.launch
-
- Y_DIFF [default: 0]
- launch/wifi_status.launch
-
- network_interface [default: wlan0]
- warning_quality [default: 0.4]
- update_rate [default: 1.0]
- launch/simple_silverhammer_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_network_tools at Robotics Stack Exchange
|
|
jsk_network_tools package from jsk_common repoaudio_video_recorder jsk_common dynamic_tf_publisher jsk_data jsk_network_tools image_view2 multi_map_server jsk_rosbag_tools jsk_tilt_laser jsk_tools jsk_topic_tools virtual_force_publisher |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.16 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_common.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-06 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Yusuke Furuta
jsk_network_tools
Limited Network Communication.
The goal of silverhammer is to provide communication between two different ROS networks over limited network.
Currently jsk_network_tools supports two types of limited network model:
- Unidirectional and narrow network.
- Unidirectional and broad but intermittent network.
These two models are strongly inspired by DRC-final.
Problem of communication over limited network
The problems of ‘limited network’ are:
- narrow bandwidth
- intermittent connection
There problems cause following issues:
-
Hand-shaking is high cost.
Any kind of hand-shaking takes much time for example TCP hand-shaking and ROS node hand-shaking.
-
Re-sending is high cost.
Any kind of re-sending packets takes much time and consumes bandwidth for example TCP re-sending.
-
Re-connection is high cost.
Over intermittent connection, we need to re-connect over and over times. If bandwidth is narrow, hand-shaking is high cost mentioned above and re-connection is much high cost.
Because of these problems, we cannot use rich and well-designed communication tool such as ROS and ZMQ.
Approach towards communication over limited network
jsk_network_tools’ approach for the problems is quite simple.
- Use USP with fixed and periodic rate to remove hand-shaking of connection.
- For narrow band network, compress message as small as possible
- For broad band network, support rich and large message and separate them into smaller UDP packets.
- Our network model is streaming. jsk_network_tools provides
streamerandreceiver. - jsk_network_tools is designed to cooperate with ROS communication suite.
narrow network
jsk_network_tools provides silverhammer_lowspeed_streamer.py and silverhammer_lowspeed_receiver.py, which is
a gateway between two different ROS network over narrow network.
Features of silverhammer_lowspeed_{streamer,receiver}.py are:
- Use UDP prevent hand-shaking and re-sending.
Simply use UDP protocol with fixed rate.
- Serialize data into small binary format.
Automatically generate serialization format from definition of ROS message. However, this serialization only supports the simplest message definition. Limitation of the serialization are:
- No nested field is allowed. Only built-in types are supported.
- No variable length array and
stringare allowed. -
int8,durationandtimeare not supported.
silverhammer_lowspeed_gateway.py uses python struct module to serialize/deserialize messages.
- Input is one topic and output is also one topic.
In order to tucke against narrow bandwidth, we need to chose and compress transferred data. Therefore, input and output of streamer and receiver are limited to only one topic.
broad network
jsk_network_tools provides silverhammer_highspeed_streamer.py and
silverhammer_highspeed_receiver.py to achieve high-throughput over broadband network.
Features of silverhammer_lowspeed_{streamer,receiver}.py are:
- Use UDP prevent hand-shaking and re-sending.
Simply use UDP protocol with fixed rate.
- Serialize/Deserialize data using ROS serialization.
On this model, jsk_network_tools utilizes ROS serialization.
Only one limitation is that the types of the fields should be another
ROS type such as sensor_msgs/Image, geometry_msgs/Pose and so on.
-
Split ROS message into small UDP packets and collect them into ROS message.
-
Input and output are multiple-topics.
The topics which streamer subscribes and receiver publishes are automatically decided according to definition of FC2OCSLargeData.msg.
The rule is simple:
Each field name represents topic name and
__(double under scores) is replaced by/.
For example, you want to tranfer /camera/rgb/image_rect topic, your message should have
following field definition.
sensor_msgs/Image camera__rgb__image_rect
Streamer automatically split one big data into small UDP packets. Receiver collects the packets and re-publish the messages to the topics.
Format of the UDP packet is:
+--------+-----------+------------+-----------------+
| Seq Id | Packet Id | Packet Num | Data ... |
+--------+-----------+------------+-----------------+
| 4B | 4B | 4B | |
|<-------------------Staic Size--------------------->
-
Seq Id
Sequence Id. This is incremented when streamer sends new ROS message.
-
Packet Id
It is incremented when streamer sends new packet.
-
Packet Num
The number of the packets for receiver to decode packets.
Software manual
silverhammer_lowspeed_streamer.py
Subscribing Topics
-
~inputType of
~inputtopic is specified by~messageparameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCS)ROS message type to send over UDP. It should follow limitation of message definition described above.
-
~to_port(default:1024) -
~to_ip(default:127.0.0.1)Port number and hostname to send message.
-
~send_rate(default:1)Fixed rate in Hz to send message.
-
~event_driven(default:False)Streamer sends UDP packet immediately
~inputtopic is published.silverhammer_lowspeed_receiver.pyPublishing Topics
-
~outputType of
~outputtopic is specified by~messageparameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCS)ROS message type to receive over UDP. It should follow limitation of message definition described above.
-
~receive_port(default:1024) -
~receive_ip(default:127.0.0.1)Port number and hostname to receive message.
-
~receive_buffer_sizeBuffer size to receive UDP packet.
silverhammer_highspeed_streamer.py
Subscribing Topics
Input topics are automatically determined by message definition specified
by ~message parameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCSLargeData)ROS message type to send over UDP. It should follow limitation of message definition described above.
-
~to_port(default:16484) -
~to_ip(default:localhost)Port number and hostname to send message.
-
~send_rate(default:2)Fixed rate in Hz to send message.
-
~packet_size(default:12000)Packet size of UDP. ROS message will be splitted into the packets of
~packet_size. Unit is byte. -
~packet_interval(default:0.001)Interval between sending each packet to avoid consume large amount of bandwidth.
silverhammer_highspeed_receiver.py
Publishing Topics
output topics are automatically determined by message definition specified
by ~message parameter and ~topic_prefix parameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCSLargeData)ROS message type to receive over UDP. It should follow limitation of message definition described above.
-
~receive_port(default:16484) -
~receive_ip(default:localhost)Port number and hostname to receive message.
-
~packet_size(default:1000)Packet size of UDP.
-
~topic_prefix(default:/from_fc)Prefix added in front of output topics.
-
~pesimistic(dfeault:False)Do not concatenate packets with 0 filling if this parameter is True.
Changelog for package jsk_network_tools
2.2.16 (2025-01-06)
2.2.15 (2024-12-13)
2.2.14 (2024-12-12)
- remove use_source_permissions to fix build error
(#1805)
- use catkin_install_python to install python scripts
- Contributors: Yoshiki Obinata
2.2.13 (2023-11-09)
- add test to compile on 22.04, see
#1770
(#1773)
- use setuptools setup from distutils is deprecated and will be removed eventually.
- Fixed typo of Software License Agreement. and/o2r to and/or (#1764) Fixed typo of Software License Agreement. and/o2r to and/or
- Contributors: Kei Okada, Shingo Kitagawa, Iory Yanokura, v4hn
2.2.12 (2022-06-07)
- add skip_interfaces param in network_status.py (#1664)
- Contributors: Shingo Kitagawa
2.2.11 (2020-07-10)
- Fix for noetic buid
(#1648)
- fix jsk_network_tools for python3
- jsk_network_tools: set queue_size=1
- fix for python3, except, print .…
- upgrade package.xml to format=3
- [network_status.py] add queue_size (#1642)
- Contributors: Kei Okada, Naoki Hiraoka, Shingo Kitagawa
2.2.10 (2018-11-03)
2.2.9 (2018-11-02)
2.2.8 (2018-11-01)
- Install missing launch/ and test/ as well (#1604)
- Contributors: Yuto Uchimi
2.2.7 (2018-06-27)
2.2.6 (2018-01-05)
- Fix warning about %d vs %lu in silverhammer_highspeed_internal_receiver (#1537)
- Contributors: Kentaro Wada
2.2.5 (2017-06-19)
2.2.4 (2017-06-14)
2.2.3 (2017-03-23)
2.2.2 (2016-12-30)
2.2.1 (2016-12-13)
2.2.0 (2016-10-28)
2.1.2 (2016-09-14)
2.1.1 (2016-09-07)
2.1.0 (2016-09-06)
- [jsk_network_tools] add wifi_status.py (https://github.com/jsk-ros-pkg/jsk_common/pull/1448)
- Contributors: Yuki Furuta
2.0.17 (2016-07-21)
2.0.16 (2016-06-19)
2.0.15 (2016-06-13)
2.0.14 (2016-05-14)
2.0.13 (2016-04-29)
2.0.12 (2016-04-18)
2.0.11 (2016-03-20)
- remove dynamic_reconfigure.parameter_generator, which only used for rosbuild
- Contributors: Kei Okada
2.0.10 (2016-02-13)
- Update maintainer of jsk_network_tools and jsk_topic_tools
- Contributors: Ryohei Ueda
2.0.9 (2015-12-14)
2.0.8 (2015-12-07)
2.0.7 (2015-12-05)
2.0.6 (2015-12-02)
2.0.5 (2015-11-30)
2.0.4 (2015-11-25)
- [jsk_network_tools] Disable test
- [jsk_network_tools] Do not run rostest unless CATKIN_ENABLE_TESTING is false
- [jsk_topic_tools] Add name attribute to test node
- [jsk_network_tools] Depends on roscpp and rospy
- [jsk_network_tools/silverhammer_highspeed_internal_receiver] Chop msg.data length to actual received size
- [jsk_network_tools] Update last_received_seq_id correctly at first time
- [jsk_network_tools] Add kbps and mbps unit to network_status
- [jsk_network_tools] Add ${hostname}/nonlocal/{receive, transmit} topics to accumurate all the communication amount except for localhost
- [jsk_network_tools] Add C++ implementation of silverhammer_highspeed_receiver. It cooperates with python thin wrapper and bridged via ros between them.
- Contributors: Ryohei Ueda
2.0.3 (2015-07-24)
2.0.2 (2015-07-07)
- [jsk_topic_tools] Check ROS original message size in silverhammer_lowspeed_check_size
- [jsk_network_tools] Remove euslisp code from jsk_network_tools to resolve distorted dependency
- [jsk_network_tools] Publish under hostname prefix in network_status.py
- Contributors: Ryohei Ueda
2.0.1 (2015-06-28)
2.0.0 (2015-06-19)
1.0.72 (2015-06-07)
- [jsk_network_tools] add bandwidth/rate checker for lowspeed
- [jsk_network_tools] add pub_rate param for test
- [jsk_network_tools] use service request instead of reloading param to set send_rate
- [jsk_network_tools] use float to avoid zero-division error instead of int
- [jsk_network_tools] add SetSendRate.srv
- [jsk_network_tools/silverhammer_lowspeed_streamer.py] add service for setting send_rate
- [jsk_network_tools] bugfix: fix rmem_max value; set bash option to check command executed successfly
- [jsk_network_tools] Use loginfo instead of logwarn in silverhammre highspeed receiver
- [jsk_network_tools] Update for synchronized topic
- [jsk_network_tools] Add jaxon_red to joint-states-compressor.l
- [jsk_network_tools] Synchronize timestamp
- [jsk_network_tools/silverhammer_highspeed_receiver.py] ensure terminate multiprocess
- [jsk_network_tools] Update timestamp in highspeed receiver if specified
- [jsk_network_tools] publish time information from silverhammer streamers
- [jsk_network_tools] check/fix udp buffer size when launches silverhammer_highspeed_receiver.py
- [jsk_network_tools] add shell script to expand udp receive buffer
- Contributors: Yuki Furuta, Ryohei Ueda
1.0.71 (2015-05-17)
- [jsk_network_tools] use multiprocess on silverhammer receiver
- [jsk_network_tools/silverhammer_lowspeed_receiver] Force to disable timeout
- [jsk_network_tools] add wireshark plugin for silverhammer udp protocol
- Contributors: Yuki Furuta, Ryohei Ueda
1.0.70 (2015-05-08)
- [jsk_network_tools] Fix bytes/bits conversions
- Contributors: Ryohei Ueda
1.0.69 (2015-05-05)
1.0.68 (2015-05-05)
- [jsk_network_tools] Use 1500*8 bits as default packet_size for MTU:=1500 environment in silverhammer_highspeed communication
- Contributors: Ryohei Ueda
1.0.67 (2015-05-03)
- [angle-vector-compress.l] 360-mode input of 0 will return 0
- [angle-vector-compress.l] add debug code (but commented out for now)
- [jsk_network_tools] Use ~robot parameter and it's initialized to ROBOT environment variable
- [jsk_network_tools/test/launch_joint_state_compressor.xml] set ROBOT environment for test (and this should be removed), see https://github.com/jsk-ros-pkg/jsk_common/commit/39089ecfc793ac655d45552545ddc13c1fe87b09#commitcomment-10899961
- load environment variable for setting robot in joint-state-compressor.l
- [jsk_network_tools] add test for angle-vector/JointStates compress
- [jsk_network_tools] Including pr2_description/upload_pr2.launch in order to set /robot_description
- [jsk_network_tools] Support jaxon in compressing/decompressing angle-vector
- Contributors: Yuki Furuta, Kei Okada, Masaki Murooka, Ryohei Ueda
1.0.66 (2015-04-03)
1.0.65 (2015-04-02)
- [jsk_network_tools] Support effort in joint state compressor/decompressor
- [jsk_network_tools] Latch output topic of highspeed receiver
- [jsk_network_tools] More readable warning about packet miss
- [jsk_network_tools] Add new parameter ~packet_sleep_sum not to sleep per one packet but several packets
- Contributors: Ryohei Ueda
1.0.64 (2015-03-29)
- [jsk_network_tools] Fix typos
- [jsk_network_tools] Add dynamic_reconfigure interface to specify bandwidth of highspeed streamer
- [jsk_network_tools] Defaults to 280 Mbps
- [jsk_network_tools] Decide interval between sending packets based on bandwidth
- [jsk_network_tools] Do not load unused robot models when compress/decompress joint_states
- [jsk_network_tools] Publish the last received time as std_msgs/Time from silverhammer receivers
- [jsk_network_tools] Force to be within 0-255 when compressing joint angles
- [jsk_network_tools] Add diagnostics information to lowspeed streamer and receiver
- [jsk_network_tools] Add diagnostics information to highspeed streamer/receiver
- [jsk_network_tools] Add event_driven mode to lowspeed streamer
- [jsk_network_tools] Add event-driven mode to lowspeed streamer
- Contributors: Ryohei Ueda
1.0.63 (2015-02-19)
1.0.62 (2015-02-17)
- [jsk_network_tools] Add ~packet_interval to highspeed streamer to avoid consuming too much bandwidth
- [jsk_network_tools] latch output of joint-state-decompressor.l
- [jsk_network_tools] Support messages which has longer joints than robot model
- [jsk_network_tools] Publish the last time to send/receive messages
- Contributors: Ryohei Ueda
1.0.61 (2015-02-11)
- [jsk_network_tools] Enable unit test
- [jsk_network_tools] Add unittest about ROS<-->UDP message conversion
- [jsk_network_tools] Fix for uint32 data
- [jsk_network_tools] Fix how to resolve uint8 array
- [jsk_network_tools] Update sample of joint states compressor
- [jsk_network_tools] Fix compressing joint-angles of infinite joint
- Contributors: Ryohei Ueda
1.0.60 (2015-02-03)
1.0.59 (2015-02-03)
- [jsk_network_tools] Add euslisp script to compress/decompres joint states. Originally implemented in jsk_pr2_startup by Y.Furuta
- [jsk_topic_tools] Add pesimistic mode for highspeed receiver
- add param to set rate
- [jsk_network_tools] Support run silverhammer_highspeed_receiver.py without topic_prefix
- [jsk_network_tools] Add script to check size in lowspeed network
- [jsk_network_tools] Add openni2 sample for highspeed streaming using silverhammer toolkit and recover message if possible of missing packets
- [jsk_network_tools] use png images for documentation
- [jsk_network_tools] Simpler implementation of lowspeed communication and update document. Bang Bang!
- [jsk_network_tools] Add documentation about limited network communication
- [jsk_network_tools] Script for DRC-highspeed-link communication
- [jsk_network_tools] Fix typo: OSC -> OCS
- [jsk_network_tools] for Low-bandwidth environment, add silverhammer toolset. You can communicate between two ROS-neworks over low-bandwidth network like DRC final.
- Contributors: Ryohei Ueda, Yusuke Furuta
1.0.58 (2015-01-07)
1.0.57 (2014-12-23)
1.0.56 (2014-12-17)
- plot multiple lines
- add network plot
- Contributors: Yusuke Furuta
1.0.55 (2014-12-09)
- fix msg error in heartbeat
- add description
- add parameter to set hz
- Contributors: Yusuke Furuta
1.0.54 (2014-11-15)
1.0.53 (2014-11-01)
1.0.52 (2014-10-23)
1.0.51 (2014-10-20)
1.0.50 (2014-10-20)
1.0.49 (2014-10-13)
1.0.48 (2014-10-12)
1.0.47 (2014-10-08)
- Contributors: Yusuke Furuta
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| std_msgs | |
| message_generation | |
| sensor_msgs | |
| rostest | |
| diagnostic_msgs | |
| diagnostic_updater | |
| dynamic_reconfigure | |
| roscpp | |
| rospy | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Launch files
- test/silverhammer_lowspeed_load_test_fc.launch
- test/silverhammer_lowspeed_load_test_ocs.launch
- launch/simple_silverhammer_openni_sample.launch
- launch/simple_silverhammer_internal_buffer_openni_sample.launch
- launch/joint_state_compress_sample.launch
-
- Y_DIFF [default: 0]
- launch/wifi_status.launch
-
- network_interface [default: wlan0]
- warning_quality [default: 0.4]
- update_rate [default: 1.0]
- launch/simple_silverhammer_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_network_tools at Robotics Stack Exchange
|
|
jsk_network_tools package from jsk_common repoaudio_video_recorder jsk_common dynamic_tf_publisher jsk_data jsk_network_tools image_view2 multi_map_server jsk_rosbag_tools jsk_tilt_laser jsk_tools jsk_topic_tools virtual_force_publisher |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.16 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_common.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-06 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Yusuke Furuta
jsk_network_tools
Limited Network Communication.
The goal of silverhammer is to provide communication between two different ROS networks over limited network.
Currently jsk_network_tools supports two types of limited network model:
- Unidirectional and narrow network.
- Unidirectional and broad but intermittent network.
These two models are strongly inspired by DRC-final.
Problem of communication over limited network
The problems of ‘limited network’ are:
- narrow bandwidth
- intermittent connection
There problems cause following issues:
-
Hand-shaking is high cost.
Any kind of hand-shaking takes much time for example TCP hand-shaking and ROS node hand-shaking.
-
Re-sending is high cost.
Any kind of re-sending packets takes much time and consumes bandwidth for example TCP re-sending.
-
Re-connection is high cost.
Over intermittent connection, we need to re-connect over and over times. If bandwidth is narrow, hand-shaking is high cost mentioned above and re-connection is much high cost.
Because of these problems, we cannot use rich and well-designed communication tool such as ROS and ZMQ.
Approach towards communication over limited network
jsk_network_tools’ approach for the problems is quite simple.
- Use USP with fixed and periodic rate to remove hand-shaking of connection.
- For narrow band network, compress message as small as possible
- For broad band network, support rich and large message and separate them into smaller UDP packets.
- Our network model is streaming. jsk_network_tools provides
streamerandreceiver. - jsk_network_tools is designed to cooperate with ROS communication suite.
narrow network
jsk_network_tools provides silverhammer_lowspeed_streamer.py and silverhammer_lowspeed_receiver.py, which is
a gateway between two different ROS network over narrow network.
Features of silverhammer_lowspeed_{streamer,receiver}.py are:
- Use UDP prevent hand-shaking and re-sending.
Simply use UDP protocol with fixed rate.
- Serialize data into small binary format.
Automatically generate serialization format from definition of ROS message. However, this serialization only supports the simplest message definition. Limitation of the serialization are:
- No nested field is allowed. Only built-in types are supported.
- No variable length array and
stringare allowed. -
int8,durationandtimeare not supported.
silverhammer_lowspeed_gateway.py uses python struct module to serialize/deserialize messages.
- Input is one topic and output is also one topic.
In order to tucke against narrow bandwidth, we need to chose and compress transferred data. Therefore, input and output of streamer and receiver are limited to only one topic.
broad network
jsk_network_tools provides silverhammer_highspeed_streamer.py and
silverhammer_highspeed_receiver.py to achieve high-throughput over broadband network.
Features of silverhammer_lowspeed_{streamer,receiver}.py are:
- Use UDP prevent hand-shaking and re-sending.
Simply use UDP protocol with fixed rate.
- Serialize/Deserialize data using ROS serialization.
On this model, jsk_network_tools utilizes ROS serialization.
Only one limitation is that the types of the fields should be another
ROS type such as sensor_msgs/Image, geometry_msgs/Pose and so on.
-
Split ROS message into small UDP packets and collect them into ROS message.
-
Input and output are multiple-topics.
The topics which streamer subscribes and receiver publishes are automatically decided according to definition of FC2OCSLargeData.msg.
The rule is simple:
Each field name represents topic name and
__(double under scores) is replaced by/.
For example, you want to tranfer /camera/rgb/image_rect topic, your message should have
following field definition.
sensor_msgs/Image camera__rgb__image_rect
Streamer automatically split one big data into small UDP packets. Receiver collects the packets and re-publish the messages to the topics.
Format of the UDP packet is:
+--------+-----------+------------+-----------------+
| Seq Id | Packet Id | Packet Num | Data ... |
+--------+-----------+------------+-----------------+
| 4B | 4B | 4B | |
|<-------------------Staic Size--------------------->
-
Seq Id
Sequence Id. This is incremented when streamer sends new ROS message.
-
Packet Id
It is incremented when streamer sends new packet.
-
Packet Num
The number of the packets for receiver to decode packets.
Software manual
silverhammer_lowspeed_streamer.py
Subscribing Topics
-
~inputType of
~inputtopic is specified by~messageparameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCS)ROS message type to send over UDP. It should follow limitation of message definition described above.
-
~to_port(default:1024) -
~to_ip(default:127.0.0.1)Port number and hostname to send message.
-
~send_rate(default:1)Fixed rate in Hz to send message.
-
~event_driven(default:False)Streamer sends UDP packet immediately
~inputtopic is published.silverhammer_lowspeed_receiver.pyPublishing Topics
-
~outputType of
~outputtopic is specified by~messageparameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCS)ROS message type to receive over UDP. It should follow limitation of message definition described above.
-
~receive_port(default:1024) -
~receive_ip(default:127.0.0.1)Port number and hostname to receive message.
-
~receive_buffer_sizeBuffer size to receive UDP packet.
silverhammer_highspeed_streamer.py
Subscribing Topics
Input topics are automatically determined by message definition specified
by ~message parameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCSLargeData)ROS message type to send over UDP. It should follow limitation of message definition described above.
-
~to_port(default:16484) -
~to_ip(default:localhost)Port number and hostname to send message.
-
~send_rate(default:2)Fixed rate in Hz to send message.
-
~packet_size(default:12000)Packet size of UDP. ROS message will be splitted into the packets of
~packet_size. Unit is byte. -
~packet_interval(default:0.001)Interval between sending each packet to avoid consume large amount of bandwidth.
silverhammer_highspeed_receiver.py
Publishing Topics
output topics are automatically determined by message definition specified
by ~message parameter and ~topic_prefix parameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCSLargeData)ROS message type to receive over UDP. It should follow limitation of message definition described above.
-
~receive_port(default:16484) -
~receive_ip(default:localhost)Port number and hostname to receive message.
-
~packet_size(default:1000)Packet size of UDP.
-
~topic_prefix(default:/from_fc)Prefix added in front of output topics.
-
~pesimistic(dfeault:False)Do not concatenate packets with 0 filling if this parameter is True.
Changelog for package jsk_network_tools
2.2.16 (2025-01-06)
2.2.15 (2024-12-13)
2.2.14 (2024-12-12)
- remove use_source_permissions to fix build error
(#1805)
- use catkin_install_python to install python scripts
- Contributors: Yoshiki Obinata
2.2.13 (2023-11-09)
- add test to compile on 22.04, see
#1770
(#1773)
- use setuptools setup from distutils is deprecated and will be removed eventually.
- Fixed typo of Software License Agreement. and/o2r to and/or (#1764) Fixed typo of Software License Agreement. and/o2r to and/or
- Contributors: Kei Okada, Shingo Kitagawa, Iory Yanokura, v4hn
2.2.12 (2022-06-07)
- add skip_interfaces param in network_status.py (#1664)
- Contributors: Shingo Kitagawa
2.2.11 (2020-07-10)
- Fix for noetic buid
(#1648)
- fix jsk_network_tools for python3
- jsk_network_tools: set queue_size=1
- fix for python3, except, print .…
- upgrade package.xml to format=3
- [network_status.py] add queue_size (#1642)
- Contributors: Kei Okada, Naoki Hiraoka, Shingo Kitagawa
2.2.10 (2018-11-03)
2.2.9 (2018-11-02)
2.2.8 (2018-11-01)
- Install missing launch/ and test/ as well (#1604)
- Contributors: Yuto Uchimi
2.2.7 (2018-06-27)
2.2.6 (2018-01-05)
- Fix warning about %d vs %lu in silverhammer_highspeed_internal_receiver (#1537)
- Contributors: Kentaro Wada
2.2.5 (2017-06-19)
2.2.4 (2017-06-14)
2.2.3 (2017-03-23)
2.2.2 (2016-12-30)
2.2.1 (2016-12-13)
2.2.0 (2016-10-28)
2.1.2 (2016-09-14)
2.1.1 (2016-09-07)
2.1.0 (2016-09-06)
- [jsk_network_tools] add wifi_status.py (https://github.com/jsk-ros-pkg/jsk_common/pull/1448)
- Contributors: Yuki Furuta
2.0.17 (2016-07-21)
2.0.16 (2016-06-19)
2.0.15 (2016-06-13)
2.0.14 (2016-05-14)
2.0.13 (2016-04-29)
2.0.12 (2016-04-18)
2.0.11 (2016-03-20)
- remove dynamic_reconfigure.parameter_generator, which only used for rosbuild
- Contributors: Kei Okada
2.0.10 (2016-02-13)
- Update maintainer of jsk_network_tools and jsk_topic_tools
- Contributors: Ryohei Ueda
2.0.9 (2015-12-14)
2.0.8 (2015-12-07)
2.0.7 (2015-12-05)
2.0.6 (2015-12-02)
2.0.5 (2015-11-30)
2.0.4 (2015-11-25)
- [jsk_network_tools] Disable test
- [jsk_network_tools] Do not run rostest unless CATKIN_ENABLE_TESTING is false
- [jsk_topic_tools] Add name attribute to test node
- [jsk_network_tools] Depends on roscpp and rospy
- [jsk_network_tools/silverhammer_highspeed_internal_receiver] Chop msg.data length to actual received size
- [jsk_network_tools] Update last_received_seq_id correctly at first time
- [jsk_network_tools] Add kbps and mbps unit to network_status
- [jsk_network_tools] Add ${hostname}/nonlocal/{receive, transmit} topics to accumurate all the communication amount except for localhost
- [jsk_network_tools] Add C++ implementation of silverhammer_highspeed_receiver. It cooperates with python thin wrapper and bridged via ros between them.
- Contributors: Ryohei Ueda
2.0.3 (2015-07-24)
2.0.2 (2015-07-07)
- [jsk_topic_tools] Check ROS original message size in silverhammer_lowspeed_check_size
- [jsk_network_tools] Remove euslisp code from jsk_network_tools to resolve distorted dependency
- [jsk_network_tools] Publish under hostname prefix in network_status.py
- Contributors: Ryohei Ueda
2.0.1 (2015-06-28)
2.0.0 (2015-06-19)
1.0.72 (2015-06-07)
- [jsk_network_tools] add bandwidth/rate checker for lowspeed
- [jsk_network_tools] add pub_rate param for test
- [jsk_network_tools] use service request instead of reloading param to set send_rate
- [jsk_network_tools] use float to avoid zero-division error instead of int
- [jsk_network_tools] add SetSendRate.srv
- [jsk_network_tools/silverhammer_lowspeed_streamer.py] add service for setting send_rate
- [jsk_network_tools] bugfix: fix rmem_max value; set bash option to check command executed successfly
- [jsk_network_tools] Use loginfo instead of logwarn in silverhammre highspeed receiver
- [jsk_network_tools] Update for synchronized topic
- [jsk_network_tools] Add jaxon_red to joint-states-compressor.l
- [jsk_network_tools] Synchronize timestamp
- [jsk_network_tools/silverhammer_highspeed_receiver.py] ensure terminate multiprocess
- [jsk_network_tools] Update timestamp in highspeed receiver if specified
- [jsk_network_tools] publish time information from silverhammer streamers
- [jsk_network_tools] check/fix udp buffer size when launches silverhammer_highspeed_receiver.py
- [jsk_network_tools] add shell script to expand udp receive buffer
- Contributors: Yuki Furuta, Ryohei Ueda
1.0.71 (2015-05-17)
- [jsk_network_tools] use multiprocess on silverhammer receiver
- [jsk_network_tools/silverhammer_lowspeed_receiver] Force to disable timeout
- [jsk_network_tools] add wireshark plugin for silverhammer udp protocol
- Contributors: Yuki Furuta, Ryohei Ueda
1.0.70 (2015-05-08)
- [jsk_network_tools] Fix bytes/bits conversions
- Contributors: Ryohei Ueda
1.0.69 (2015-05-05)
1.0.68 (2015-05-05)
- [jsk_network_tools] Use 1500*8 bits as default packet_size for MTU:=1500 environment in silverhammer_highspeed communication
- Contributors: Ryohei Ueda
1.0.67 (2015-05-03)
- [angle-vector-compress.l] 360-mode input of 0 will return 0
- [angle-vector-compress.l] add debug code (but commented out for now)
- [jsk_network_tools] Use ~robot parameter and it's initialized to ROBOT environment variable
- [jsk_network_tools/test/launch_joint_state_compressor.xml] set ROBOT environment for test (and this should be removed), see https://github.com/jsk-ros-pkg/jsk_common/commit/39089ecfc793ac655d45552545ddc13c1fe87b09#commitcomment-10899961
- load environment variable for setting robot in joint-state-compressor.l
- [jsk_network_tools] add test for angle-vector/JointStates compress
- [jsk_network_tools] Including pr2_description/upload_pr2.launch in order to set /robot_description
- [jsk_network_tools] Support jaxon in compressing/decompressing angle-vector
- Contributors: Yuki Furuta, Kei Okada, Masaki Murooka, Ryohei Ueda
1.0.66 (2015-04-03)
1.0.65 (2015-04-02)
- [jsk_network_tools] Support effort in joint state compressor/decompressor
- [jsk_network_tools] Latch output topic of highspeed receiver
- [jsk_network_tools] More readable warning about packet miss
- [jsk_network_tools] Add new parameter ~packet_sleep_sum not to sleep per one packet but several packets
- Contributors: Ryohei Ueda
1.0.64 (2015-03-29)
- [jsk_network_tools] Fix typos
- [jsk_network_tools] Add dynamic_reconfigure interface to specify bandwidth of highspeed streamer
- [jsk_network_tools] Defaults to 280 Mbps
- [jsk_network_tools] Decide interval between sending packets based on bandwidth
- [jsk_network_tools] Do not load unused robot models when compress/decompress joint_states
- [jsk_network_tools] Publish the last received time as std_msgs/Time from silverhammer receivers
- [jsk_network_tools] Force to be within 0-255 when compressing joint angles
- [jsk_network_tools] Add diagnostics information to lowspeed streamer and receiver
- [jsk_network_tools] Add diagnostics information to highspeed streamer/receiver
- [jsk_network_tools] Add event_driven mode to lowspeed streamer
- [jsk_network_tools] Add event-driven mode to lowspeed streamer
- Contributors: Ryohei Ueda
1.0.63 (2015-02-19)
1.0.62 (2015-02-17)
- [jsk_network_tools] Add ~packet_interval to highspeed streamer to avoid consuming too much bandwidth
- [jsk_network_tools] latch output of joint-state-decompressor.l
- [jsk_network_tools] Support messages which has longer joints than robot model
- [jsk_network_tools] Publish the last time to send/receive messages
- Contributors: Ryohei Ueda
1.0.61 (2015-02-11)
- [jsk_network_tools] Enable unit test
- [jsk_network_tools] Add unittest about ROS<-->UDP message conversion
- [jsk_network_tools] Fix for uint32 data
- [jsk_network_tools] Fix how to resolve uint8 array
- [jsk_network_tools] Update sample of joint states compressor
- [jsk_network_tools] Fix compressing joint-angles of infinite joint
- Contributors: Ryohei Ueda
1.0.60 (2015-02-03)
1.0.59 (2015-02-03)
- [jsk_network_tools] Add euslisp script to compress/decompres joint states. Originally implemented in jsk_pr2_startup by Y.Furuta
- [jsk_topic_tools] Add pesimistic mode for highspeed receiver
- add param to set rate
- [jsk_network_tools] Support run silverhammer_highspeed_receiver.py without topic_prefix
- [jsk_network_tools] Add script to check size in lowspeed network
- [jsk_network_tools] Add openni2 sample for highspeed streaming using silverhammer toolkit and recover message if possible of missing packets
- [jsk_network_tools] use png images for documentation
- [jsk_network_tools] Simpler implementation of lowspeed communication and update document. Bang Bang!
- [jsk_network_tools] Add documentation about limited network communication
- [jsk_network_tools] Script for DRC-highspeed-link communication
- [jsk_network_tools] Fix typo: OSC -> OCS
- [jsk_network_tools] for Low-bandwidth environment, add silverhammer toolset. You can communicate between two ROS-neworks over low-bandwidth network like DRC final.
- Contributors: Ryohei Ueda, Yusuke Furuta
1.0.58 (2015-01-07)
1.0.57 (2014-12-23)
1.0.56 (2014-12-17)
- plot multiple lines
- add network plot
- Contributors: Yusuke Furuta
1.0.55 (2014-12-09)
- fix msg error in heartbeat
- add description
- add parameter to set hz
- Contributors: Yusuke Furuta
1.0.54 (2014-11-15)
1.0.53 (2014-11-01)
1.0.52 (2014-10-23)
1.0.51 (2014-10-20)
1.0.50 (2014-10-20)
1.0.49 (2014-10-13)
1.0.48 (2014-10-12)
1.0.47 (2014-10-08)
- Contributors: Yusuke Furuta
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| std_msgs | |
| message_generation | |
| sensor_msgs | |
| rostest | |
| diagnostic_msgs | |
| diagnostic_updater | |
| dynamic_reconfigure | |
| roscpp | |
| rospy | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Launch files
- test/silverhammer_lowspeed_load_test_fc.launch
- test/silverhammer_lowspeed_load_test_ocs.launch
- launch/simple_silverhammer_openni_sample.launch
- launch/simple_silverhammer_internal_buffer_openni_sample.launch
- launch/joint_state_compress_sample.launch
-
- Y_DIFF [default: 0]
- launch/wifi_status.launch
-
- network_interface [default: wlan0]
- warning_quality [default: 0.4]
- update_rate [default: 1.0]
- launch/simple_silverhammer_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_network_tools at Robotics Stack Exchange
|
|
jsk_network_tools package from jsk_common repoaudio_video_recorder jsk_common dynamic_tf_publisher jsk_data jsk_network_tools image_view2 multi_map_server jsk_rosbag_tools jsk_tilt_laser jsk_tools jsk_topic_tools virtual_force_publisher |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.16 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_common.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-06 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Yusuke Furuta
jsk_network_tools
Limited Network Communication.
The goal of silverhammer is to provide communication between two different ROS networks over limited network.
Currently jsk_network_tools supports two types of limited network model:
- Unidirectional and narrow network.
- Unidirectional and broad but intermittent network.
These two models are strongly inspired by DRC-final.
Problem of communication over limited network
The problems of ‘limited network’ are:
- narrow bandwidth
- intermittent connection
There problems cause following issues:
-
Hand-shaking is high cost.
Any kind of hand-shaking takes much time for example TCP hand-shaking and ROS node hand-shaking.
-
Re-sending is high cost.
Any kind of re-sending packets takes much time and consumes bandwidth for example TCP re-sending.
-
Re-connection is high cost.
Over intermittent connection, we need to re-connect over and over times. If bandwidth is narrow, hand-shaking is high cost mentioned above and re-connection is much high cost.
Because of these problems, we cannot use rich and well-designed communication tool such as ROS and ZMQ.
Approach towards communication over limited network
jsk_network_tools’ approach for the problems is quite simple.
- Use USP with fixed and periodic rate to remove hand-shaking of connection.
- For narrow band network, compress message as small as possible
- For broad band network, support rich and large message and separate them into smaller UDP packets.
- Our network model is streaming. jsk_network_tools provides
streamerandreceiver. - jsk_network_tools is designed to cooperate with ROS communication suite.
narrow network
jsk_network_tools provides silverhammer_lowspeed_streamer.py and silverhammer_lowspeed_receiver.py, which is
a gateway between two different ROS network over narrow network.
Features of silverhammer_lowspeed_{streamer,receiver}.py are:
- Use UDP prevent hand-shaking and re-sending.
Simply use UDP protocol with fixed rate.
- Serialize data into small binary format.
Automatically generate serialization format from definition of ROS message. However, this serialization only supports the simplest message definition. Limitation of the serialization are:
- No nested field is allowed. Only built-in types are supported.
- No variable length array and
stringare allowed. -
int8,durationandtimeare not supported.
silverhammer_lowspeed_gateway.py uses python struct module to serialize/deserialize messages.
- Input is one topic and output is also one topic.
In order to tucke against narrow bandwidth, we need to chose and compress transferred data. Therefore, input and output of streamer and receiver are limited to only one topic.
broad network
jsk_network_tools provides silverhammer_highspeed_streamer.py and
silverhammer_highspeed_receiver.py to achieve high-throughput over broadband network.
Features of silverhammer_lowspeed_{streamer,receiver}.py are:
- Use UDP prevent hand-shaking and re-sending.
Simply use UDP protocol with fixed rate.
- Serialize/Deserialize data using ROS serialization.
On this model, jsk_network_tools utilizes ROS serialization.
Only one limitation is that the types of the fields should be another
ROS type such as sensor_msgs/Image, geometry_msgs/Pose and so on.
-
Split ROS message into small UDP packets and collect them into ROS message.
-
Input and output are multiple-topics.
The topics which streamer subscribes and receiver publishes are automatically decided according to definition of FC2OCSLargeData.msg.
The rule is simple:
Each field name represents topic name and
__(double under scores) is replaced by/.
For example, you want to tranfer /camera/rgb/image_rect topic, your message should have
following field definition.
sensor_msgs/Image camera__rgb__image_rect
Streamer automatically split one big data into small UDP packets. Receiver collects the packets and re-publish the messages to the topics.
Format of the UDP packet is:
+--------+-----------+------------+-----------------+
| Seq Id | Packet Id | Packet Num | Data ... |
+--------+-----------+------------+-----------------+
| 4B | 4B | 4B | |
|<-------------------Staic Size--------------------->
-
Seq Id
Sequence Id. This is incremented when streamer sends new ROS message.
-
Packet Id
It is incremented when streamer sends new packet.
-
Packet Num
The number of the packets for receiver to decode packets.
Software manual
silverhammer_lowspeed_streamer.py
Subscribing Topics
-
~inputType of
~inputtopic is specified by~messageparameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCS)ROS message type to send over UDP. It should follow limitation of message definition described above.
-
~to_port(default:1024) -
~to_ip(default:127.0.0.1)Port number and hostname to send message.
-
~send_rate(default:1)Fixed rate in Hz to send message.
-
~event_driven(default:False)Streamer sends UDP packet immediately
~inputtopic is published.silverhammer_lowspeed_receiver.pyPublishing Topics
-
~outputType of
~outputtopic is specified by~messageparameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCS)ROS message type to receive over UDP. It should follow limitation of message definition described above.
-
~receive_port(default:1024) -
~receive_ip(default:127.0.0.1)Port number and hostname to receive message.
-
~receive_buffer_sizeBuffer size to receive UDP packet.
silverhammer_highspeed_streamer.py
Subscribing Topics
Input topics are automatically determined by message definition specified
by ~message parameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCSLargeData)ROS message type to send over UDP. It should follow limitation of message definition described above.
-
~to_port(default:16484) -
~to_ip(default:localhost)Port number and hostname to send message.
-
~send_rate(default:2)Fixed rate in Hz to send message.
-
~packet_size(default:12000)Packet size of UDP. ROS message will be splitted into the packets of
~packet_size. Unit is byte. -
~packet_interval(default:0.001)Interval between sending each packet to avoid consume large amount of bandwidth.
silverhammer_highspeed_receiver.py
Publishing Topics
output topics are automatically determined by message definition specified
by ~message parameter and ~topic_prefix parameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCSLargeData)ROS message type to receive over UDP. It should follow limitation of message definition described above.
-
~receive_port(default:16484) -
~receive_ip(default:localhost)Port number and hostname to receive message.
-
~packet_size(default:1000)Packet size of UDP.
-
~topic_prefix(default:/from_fc)Prefix added in front of output topics.
-
~pesimistic(dfeault:False)Do not concatenate packets with 0 filling if this parameter is True.
Changelog for package jsk_network_tools
2.2.16 (2025-01-06)
2.2.15 (2024-12-13)
2.2.14 (2024-12-12)
- remove use_source_permissions to fix build error
(#1805)
- use catkin_install_python to install python scripts
- Contributors: Yoshiki Obinata
2.2.13 (2023-11-09)
- add test to compile on 22.04, see
#1770
(#1773)
- use setuptools setup from distutils is deprecated and will be removed eventually.
- Fixed typo of Software License Agreement. and/o2r to and/or (#1764) Fixed typo of Software License Agreement. and/o2r to and/or
- Contributors: Kei Okada, Shingo Kitagawa, Iory Yanokura, v4hn
2.2.12 (2022-06-07)
- add skip_interfaces param in network_status.py (#1664)
- Contributors: Shingo Kitagawa
2.2.11 (2020-07-10)
- Fix for noetic buid
(#1648)
- fix jsk_network_tools for python3
- jsk_network_tools: set queue_size=1
- fix for python3, except, print .…
- upgrade package.xml to format=3
- [network_status.py] add queue_size (#1642)
- Contributors: Kei Okada, Naoki Hiraoka, Shingo Kitagawa
2.2.10 (2018-11-03)
2.2.9 (2018-11-02)
2.2.8 (2018-11-01)
- Install missing launch/ and test/ as well (#1604)
- Contributors: Yuto Uchimi
2.2.7 (2018-06-27)
2.2.6 (2018-01-05)
- Fix warning about %d vs %lu in silverhammer_highspeed_internal_receiver (#1537)
- Contributors: Kentaro Wada
2.2.5 (2017-06-19)
2.2.4 (2017-06-14)
2.2.3 (2017-03-23)
2.2.2 (2016-12-30)
2.2.1 (2016-12-13)
2.2.0 (2016-10-28)
2.1.2 (2016-09-14)
2.1.1 (2016-09-07)
2.1.0 (2016-09-06)
- [jsk_network_tools] add wifi_status.py (https://github.com/jsk-ros-pkg/jsk_common/pull/1448)
- Contributors: Yuki Furuta
2.0.17 (2016-07-21)
2.0.16 (2016-06-19)
2.0.15 (2016-06-13)
2.0.14 (2016-05-14)
2.0.13 (2016-04-29)
2.0.12 (2016-04-18)
2.0.11 (2016-03-20)
- remove dynamic_reconfigure.parameter_generator, which only used for rosbuild
- Contributors: Kei Okada
2.0.10 (2016-02-13)
- Update maintainer of jsk_network_tools and jsk_topic_tools
- Contributors: Ryohei Ueda
2.0.9 (2015-12-14)
2.0.8 (2015-12-07)
2.0.7 (2015-12-05)
2.0.6 (2015-12-02)
2.0.5 (2015-11-30)
2.0.4 (2015-11-25)
- [jsk_network_tools] Disable test
- [jsk_network_tools] Do not run rostest unless CATKIN_ENABLE_TESTING is false
- [jsk_topic_tools] Add name attribute to test node
- [jsk_network_tools] Depends on roscpp and rospy
- [jsk_network_tools/silverhammer_highspeed_internal_receiver] Chop msg.data length to actual received size
- [jsk_network_tools] Update last_received_seq_id correctly at first time
- [jsk_network_tools] Add kbps and mbps unit to network_status
- [jsk_network_tools] Add ${hostname}/nonlocal/{receive, transmit} topics to accumurate all the communication amount except for localhost
- [jsk_network_tools] Add C++ implementation of silverhammer_highspeed_receiver. It cooperates with python thin wrapper and bridged via ros between them.
- Contributors: Ryohei Ueda
2.0.3 (2015-07-24)
2.0.2 (2015-07-07)
- [jsk_topic_tools] Check ROS original message size in silverhammer_lowspeed_check_size
- [jsk_network_tools] Remove euslisp code from jsk_network_tools to resolve distorted dependency
- [jsk_network_tools] Publish under hostname prefix in network_status.py
- Contributors: Ryohei Ueda
2.0.1 (2015-06-28)
2.0.0 (2015-06-19)
1.0.72 (2015-06-07)
- [jsk_network_tools] add bandwidth/rate checker for lowspeed
- [jsk_network_tools] add pub_rate param for test
- [jsk_network_tools] use service request instead of reloading param to set send_rate
- [jsk_network_tools] use float to avoid zero-division error instead of int
- [jsk_network_tools] add SetSendRate.srv
- [jsk_network_tools/silverhammer_lowspeed_streamer.py] add service for setting send_rate
- [jsk_network_tools] bugfix: fix rmem_max value; set bash option to check command executed successfly
- [jsk_network_tools] Use loginfo instead of logwarn in silverhammre highspeed receiver
- [jsk_network_tools] Update for synchronized topic
- [jsk_network_tools] Add jaxon_red to joint-states-compressor.l
- [jsk_network_tools] Synchronize timestamp
- [jsk_network_tools/silverhammer_highspeed_receiver.py] ensure terminate multiprocess
- [jsk_network_tools] Update timestamp in highspeed receiver if specified
- [jsk_network_tools] publish time information from silverhammer streamers
- [jsk_network_tools] check/fix udp buffer size when launches silverhammer_highspeed_receiver.py
- [jsk_network_tools] add shell script to expand udp receive buffer
- Contributors: Yuki Furuta, Ryohei Ueda
1.0.71 (2015-05-17)
- [jsk_network_tools] use multiprocess on silverhammer receiver
- [jsk_network_tools/silverhammer_lowspeed_receiver] Force to disable timeout
- [jsk_network_tools] add wireshark plugin for silverhammer udp protocol
- Contributors: Yuki Furuta, Ryohei Ueda
1.0.70 (2015-05-08)
- [jsk_network_tools] Fix bytes/bits conversions
- Contributors: Ryohei Ueda
1.0.69 (2015-05-05)
1.0.68 (2015-05-05)
- [jsk_network_tools] Use 1500*8 bits as default packet_size for MTU:=1500 environment in silverhammer_highspeed communication
- Contributors: Ryohei Ueda
1.0.67 (2015-05-03)
- [angle-vector-compress.l] 360-mode input of 0 will return 0
- [angle-vector-compress.l] add debug code (but commented out for now)
- [jsk_network_tools] Use ~robot parameter and it's initialized to ROBOT environment variable
- [jsk_network_tools/test/launch_joint_state_compressor.xml] set ROBOT environment for test (and this should be removed), see https://github.com/jsk-ros-pkg/jsk_common/commit/39089ecfc793ac655d45552545ddc13c1fe87b09#commitcomment-10899961
- load environment variable for setting robot in joint-state-compressor.l
- [jsk_network_tools] add test for angle-vector/JointStates compress
- [jsk_network_tools] Including pr2_description/upload_pr2.launch in order to set /robot_description
- [jsk_network_tools] Support jaxon in compressing/decompressing angle-vector
- Contributors: Yuki Furuta, Kei Okada, Masaki Murooka, Ryohei Ueda
1.0.66 (2015-04-03)
1.0.65 (2015-04-02)
- [jsk_network_tools] Support effort in joint state compressor/decompressor
- [jsk_network_tools] Latch output topic of highspeed receiver
- [jsk_network_tools] More readable warning about packet miss
- [jsk_network_tools] Add new parameter ~packet_sleep_sum not to sleep per one packet but several packets
- Contributors: Ryohei Ueda
1.0.64 (2015-03-29)
- [jsk_network_tools] Fix typos
- [jsk_network_tools] Add dynamic_reconfigure interface to specify bandwidth of highspeed streamer
- [jsk_network_tools] Defaults to 280 Mbps
- [jsk_network_tools] Decide interval between sending packets based on bandwidth
- [jsk_network_tools] Do not load unused robot models when compress/decompress joint_states
- [jsk_network_tools] Publish the last received time as std_msgs/Time from silverhammer receivers
- [jsk_network_tools] Force to be within 0-255 when compressing joint angles
- [jsk_network_tools] Add diagnostics information to lowspeed streamer and receiver
- [jsk_network_tools] Add diagnostics information to highspeed streamer/receiver
- [jsk_network_tools] Add event_driven mode to lowspeed streamer
- [jsk_network_tools] Add event-driven mode to lowspeed streamer
- Contributors: Ryohei Ueda
1.0.63 (2015-02-19)
1.0.62 (2015-02-17)
- [jsk_network_tools] Add ~packet_interval to highspeed streamer to avoid consuming too much bandwidth
- [jsk_network_tools] latch output of joint-state-decompressor.l
- [jsk_network_tools] Support messages which has longer joints than robot model
- [jsk_network_tools] Publish the last time to send/receive messages
- Contributors: Ryohei Ueda
1.0.61 (2015-02-11)
- [jsk_network_tools] Enable unit test
- [jsk_network_tools] Add unittest about ROS<-->UDP message conversion
- [jsk_network_tools] Fix for uint32 data
- [jsk_network_tools] Fix how to resolve uint8 array
- [jsk_network_tools] Update sample of joint states compressor
- [jsk_network_tools] Fix compressing joint-angles of infinite joint
- Contributors: Ryohei Ueda
1.0.60 (2015-02-03)
1.0.59 (2015-02-03)
- [jsk_network_tools] Add euslisp script to compress/decompres joint states. Originally implemented in jsk_pr2_startup by Y.Furuta
- [jsk_topic_tools] Add pesimistic mode for highspeed receiver
- add param to set rate
- [jsk_network_tools] Support run silverhammer_highspeed_receiver.py without topic_prefix
- [jsk_network_tools] Add script to check size in lowspeed network
- [jsk_network_tools] Add openni2 sample for highspeed streaming using silverhammer toolkit and recover message if possible of missing packets
- [jsk_network_tools] use png images for documentation
- [jsk_network_tools] Simpler implementation of lowspeed communication and update document. Bang Bang!
- [jsk_network_tools] Add documentation about limited network communication
- [jsk_network_tools] Script for DRC-highspeed-link communication
- [jsk_network_tools] Fix typo: OSC -> OCS
- [jsk_network_tools] for Low-bandwidth environment, add silverhammer toolset. You can communicate between two ROS-neworks over low-bandwidth network like DRC final.
- Contributors: Ryohei Ueda, Yusuke Furuta
1.0.58 (2015-01-07)
1.0.57 (2014-12-23)
1.0.56 (2014-12-17)
- plot multiple lines
- add network plot
- Contributors: Yusuke Furuta
1.0.55 (2014-12-09)
- fix msg error in heartbeat
- add description
- add parameter to set hz
- Contributors: Yusuke Furuta
1.0.54 (2014-11-15)
1.0.53 (2014-11-01)
1.0.52 (2014-10-23)
1.0.51 (2014-10-20)
1.0.50 (2014-10-20)
1.0.49 (2014-10-13)
1.0.48 (2014-10-12)
1.0.47 (2014-10-08)
- Contributors: Yusuke Furuta
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| std_msgs | |
| message_generation | |
| sensor_msgs | |
| rostest | |
| diagnostic_msgs | |
| diagnostic_updater | |
| dynamic_reconfigure | |
| roscpp | |
| rospy | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_common | |
| jsk_tools |
Launch files
- test/silverhammer_lowspeed_load_test_fc.launch
- test/silverhammer_lowspeed_load_test_ocs.launch
- launch/simple_silverhammer_openni_sample.launch
- launch/simple_silverhammer_internal_buffer_openni_sample.launch
- launch/joint_state_compress_sample.launch
-
- Y_DIFF [default: 0]
- launch/wifi_status.launch
-
- network_interface [default: wlan0]
- warning_quality [default: 0.4]
- update_rate [default: 1.0]
- launch/simple_silverhammer_sample.launch
Messages
Services
Plugins
Recent questions tagged jsk_network_tools at Robotics Stack Exchange
|
|
jsk_network_tools package from jsk_common repoaudio_video_recorder jsk_common dynamic_tf_publisher jsk_data jsk_network_tools image_view2 multi_map_server jsk_rosbag_tools jsk_tilt_laser jsk_tools jsk_topic_tools virtual_force_publisher |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.2.16 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_common.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-01-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Ryohei Ueda
Authors
- Yusuke Furuta
jsk_network_tools
Limited Network Communication.
The goal of silverhammer is to provide communication between two different ROS networks over limited network.
Currently jsk_network_tools supports two types of limited network model:
- Unidirectional and narrow network.
- Unidirectional and broad but intermittent network.
These two models are strongly inspired by DRC-final.
Problem of communication over limited network
The problems of ‘limited network’ are:
- narrow bandwidth
- intermittent connection
There problems cause following issues:
-
Hand-shaking is high cost.
Any kind of hand-shaking takes much time for example TCP hand-shaking and ROS node hand-shaking.
-
Re-sending is high cost.
Any kind of re-sending packets takes much time and consumes bandwidth for example TCP re-sending.
-
Re-connection is high cost.
Over intermittent connection, we need to re-connect over and over times. If bandwidth is narrow, hand-shaking is high cost mentioned above and re-connection is much high cost.
Because of these problems, we cannot use rich and well-designed communication tool such as ROS and ZMQ.
Approach towards communication over limited network
jsk_network_tools’ approach for the problems is quite simple.
- Use USP with fixed and periodic rate to remove hand-shaking of connection.
- For narrow band network, compress message as small as possible
- For broad band network, support rich and large message and separate them into smaller UDP packets.
- Our network model is streaming. jsk_network_tools provides
streamerandreceiver. - jsk_network_tools is designed to cooperate with ROS communication suite.
narrow network
jsk_network_tools provides silverhammer_lowspeed_streamer.py and silverhammer_lowspeed_receiver.py, which is
a gateway between two different ROS network over narrow network.
Features of silverhammer_lowspeed_{streamer,receiver}.py are:
- Use UDP prevent hand-shaking and re-sending.
Simply use UDP protocol with fixed rate.
- Serialize data into small binary format.
Automatically generate serialization format from definition of ROS message. However, this serialization only supports the simplest message definition. Limitation of the serialization are:
- No nested field is allowed. Only built-in types are supported.
- No variable length array and
stringare allowed. -
int8,durationandtimeare not supported.
silverhammer_lowspeed_gateway.py uses python struct module to serialize/deserialize messages.
- Input is one topic and output is also one topic.
In order to tucke against narrow bandwidth, we need to chose and compress transferred data. Therefore, input and output of streamer and receiver are limited to only one topic.
broad network
jsk_network_tools provides silverhammer_highspeed_streamer.py and
silverhammer_highspeed_receiver.py to achieve high-throughput over broadband network.
Features of silverhammer_lowspeed_{streamer,receiver}.py are:
- Use UDP prevent hand-shaking and re-sending.
Simply use UDP protocol with fixed rate.
- Serialize/Deserialize data using ROS serialization.
On this model, jsk_network_tools utilizes ROS serialization.
Only one limitation is that the types of the fields should be another
ROS type such as sensor_msgs/Image, geometry_msgs/Pose and so on.
-
Split ROS message into small UDP packets and collect them into ROS message.
-
Input and output are multiple-topics.
The topics which streamer subscribes and receiver publishes are automatically decided according to definition of FC2OCSLargeData.msg.
The rule is simple:
Each field name represents topic name and
__(double under scores) is replaced by/.
For example, you want to tranfer /camera/rgb/image_rect topic, your message should have
following field definition.
sensor_msgs/Image camera__rgb__image_rect
Streamer automatically split one big data into small UDP packets. Receiver collects the packets and re-publish the messages to the topics.
Format of the UDP packet is:
+--------+-----------+------------+-----------------+
| Seq Id | Packet Id | Packet Num | Data ... |
+--------+-----------+------------+-----------------+
| 4B | 4B | 4B | |
|<-------------------Staic Size--------------------->
-
Seq Id
Sequence Id. This is incremented when streamer sends new ROS message.
-
Packet Id
It is incremented when streamer sends new packet.
-
Packet Num
The number of the packets for receiver to decode packets.
Software manual
silverhammer_lowspeed_streamer.py
Subscribing Topics
-
~inputType of
~inputtopic is specified by~messageparameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCS)ROS message type to send over UDP. It should follow limitation of message definition described above.
-
~to_port(default:1024) -
~to_ip(default:127.0.0.1)Port number and hostname to send message.
-
~send_rate(default:1)Fixed rate in Hz to send message.
-
~event_driven(default:False)Streamer sends UDP packet immediately
~inputtopic is published.silverhammer_lowspeed_receiver.pyPublishing Topics
-
~outputType of
~outputtopic is specified by~messageparameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCS)ROS message type to receive over UDP. It should follow limitation of message definition described above.
-
~receive_port(default:1024) -
~receive_ip(default:127.0.0.1)Port number and hostname to receive message.
-
~receive_buffer_sizeBuffer size to receive UDP packet.
silverhammer_highspeed_streamer.py
Subscribing Topics
Input topics are automatically determined by message definition specified
by ~message parameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCSLargeData)ROS message type to send over UDP. It should follow limitation of message definition described above.
-
~to_port(default:16484) -
~to_ip(default:localhost)Port number and hostname to send message.
-
~send_rate(default:2)Fixed rate in Hz to send message.
-
~packet_size(default:12000)Packet size of UDP. ROS message will be splitted into the packets of
~packet_size. Unit is byte. -
~packet_interval(default:0.001)Interval between sending each packet to avoid consume large amount of bandwidth.
silverhammer_highspeed_receiver.py
Publishing Topics
output topics are automatically determined by message definition specified
by ~message parameter and ~topic_prefix parameter.
Parameters
-
~message(default:jsk_network_tools/FC2OCSLargeData)ROS message type to receive over UDP. It should follow limitation of message definition described above.
-
~receive_port(default:16484) -
~receive_ip(default:localhost)Port number and hostname to receive message.
-
~packet_size(default:1000)Packet size of UDP.
-
~topic_prefix(default:/from_fc)Prefix added in front of output topics.
-
~pesimistic(dfeault:False)Do not concatenate packets with 0 filling if this parameter is True.
Changelog for package jsk_network_tools
2.2.16 (2025-01-06)
2.2.15 (2024-12-13)
2.2.14 (2024-12-12)
- remove use_source_permissions to fix build error
(#1805)
- use catkin_install_python to install python scripts
- Contributors: Yoshiki Obinata
2.2.13 (2023-11-09)
- add test to compile on 22.04, see
#1770
(#1773)
- use setuptools setup from distutils is deprecated and will be removed eventually.
- Fixed typo of Software License Agreement. and/o2r to and/or (#1764) Fixed typo of Software License Agreement. and/o2r to and/or
- Contributors: Kei Okada, Shingo Kitagawa, Iory Yanokura, v4hn
2.2.12 (2022-06-07)
- add skip_interfaces param in network_status.py (#1664)
- Contributors: Shingo Kitagawa
2.2.11 (2020-07-10)
- Fix for noetic buid
(#1648)
- fix jsk_network_tools for python3
- jsk_network_tools: set queue_size=1
- fix for python3, except, print .…
- upgrade package.xml to format=3
- [network_status.py] add queue_size (#1642)
- Contributors: Kei Okada, Naoki Hiraoka, Shingo Kitagawa
2.2.10 (2018-11-03)
2.2.9 (2018-11-02)
2.2.8 (2018-11-01)
- Install missing launch/ and test/ as well (#1604)
- Contributors: Yuto Uchimi
2.2.7 (2018-06-27)
2.2.6 (2018-01-05)
- Fix warning about %d vs %lu in silverhammer_highspeed_internal_receiver (#1537)
- Contributors: Kentaro Wada
2.2.5 (2017-06-19)
2.2.4 (2017-06-14)
2.2.3 (2017-03-23)
2.2.2 (2016-12-30)
2.2.1 (2016-12-13)
2.2.0 (2016-10-28)
2.1.2 (2016-09-14)
2.1.1 (2016-09-07)
2.1.0 (2016-09-06)
- [jsk_network_tools] add wifi_status.py (https://github.com/jsk-ros-pkg/jsk_common/pull/1448)
- Contributors: Yuki Furuta
2.0.17 (2016-07-21)
2.0.16 (2016-06-19)
2.0.15 (2016-06-13)
2.0.14 (2016-05-14)
2.0.13 (2016-04-29)
2.0.12 (2016-04-18)
2.0.11 (2016-03-20)
- remove dynamic_reconfigure.parameter_generator, which only used for rosbuild
- Contributors: Kei Okada
2.0.10 (2016-02-13)
- Update maintainer of jsk_network_tools and jsk_topic_tools
- Contributors: Ryohei Ueda
2.0.9 (2015-12-14)
2.0.8 (2015-12-07)
2.0.7 (2015-12-05)
2.0.6 (2015-12-02)
2.0.5 (2015-11-30)
2.0.4 (2015-11-25)
- [jsk_network_tools] Disable test
- [jsk_network_tools] Do not run rostest unless CATKIN_ENABLE_TESTING is false
- [jsk_topic_tools] Add name attribute to test node
- [jsk_network_tools] Depends on roscpp and rospy
- [jsk_network_tools/silverhammer_highspeed_internal_receiver] Chop msg.data length to actual received size
- [jsk_network_tools] Update last_received_seq_id correctly at first time
- [jsk_network_tools] Add kbps and mbps unit to network_status
- [jsk_network_tools] Add ${hostname}/nonlocal/{receive, transmit} topics to accumurate all the communication amount except for localhost
- [jsk_network_tools] Add C++ implementation of silverhammer_highspeed_receiver. It cooperates with python thin wrapper and bridged via ros between them.
- Contributors: Ryohei Ueda
2.0.3 (2015-07-24)
2.0.2 (2015-07-07)
- [jsk_topic_tools] Check ROS original message size in silverhammer_lowspeed_check_size
- [jsk_network_tools] Remove euslisp code from jsk_network_tools to resolve distorted dependency
- [jsk_network_tools] Publish under hostname prefix in network_status.py
- Contributors: Ryohei Ueda
2.0.1 (2015-06-28)
2.0.0 (2015-06-19)
1.0.72 (2015-06-07)
- [jsk_network_tools] add bandwidth/rate checker for lowspeed
- [jsk_network_tools] add pub_rate param for test
- [jsk_network_tools] use service request instead of reloading param to set send_rate
- [jsk_network_tools] use float to avoid zero-division error instead of int
- [jsk_network_tools] add SetSendRate.srv
- [jsk_network_tools/silverhammer_lowspeed_streamer.py] add service for setting send_rate
- [jsk_network_tools] bugfix: fix rmem_max value; set bash option to check command executed successfly
- [jsk_network_tools] Use loginfo instead of logwarn in silverhammre highspeed receiver
- [jsk_network_tools] Update for synchronized topic
- [jsk_network_tools] Add jaxon_red to joint-states-compressor.l
- [jsk_network_tools] Synchronize timestamp
- [jsk_network_tools/silverhammer_highspeed_receiver.py] ensure terminate multiprocess
- [jsk_network_tools] Update timestamp in highspeed receiver if specified
- [jsk_network_tools] publish time information from silverhammer streamers
- [jsk_network_tools] check/fix udp buffer size when launches silverhammer_highspeed_receiver.py
- [jsk_network_tools] add shell script to expand udp receive buffer
- Contributors: Yuki Furuta, Ryohei Ueda
1.0.71 (2015-05-17)
- [jsk_network_tools] use multiprocess on silverhammer receiver
- [jsk_network_tools/silverhammer_lowspeed_receiver] Force to disable timeout
- [jsk_network_tools] add wireshark plugin for silverhammer udp protocol
- Contributors: Yuki Furuta, Ryohei Ueda
1.0.70 (2015-05-08)
- [jsk_network_tools] Fix bytes/bits conversions
- Contributors: Ryohei Ueda
1.0.69 (2015-05-05)
1.0.68 (2015-05-05)
- [jsk_network_tools] Use 1500*8 bits as default packet_size for MTU:=1500 environment in silverhammer_highspeed communication
- Contributors: Ryohei Ueda
1.0.67 (2015-05-03)
- [angle-vector-compress.l] 360-mode input of 0 will return 0
- [angle-vector-compress.l] add debug code (but commented out for now)
- [jsk_network_tools] Use ~robot parameter and it's initialized to ROBOT environment variable
- [jsk_network_tools/test/launch_joint_state_compressor.xml] set ROBOT environment for test (and this should be removed), see https://github.com/jsk-ros-pkg/jsk_common/commit/39089ecfc793ac655d45552545ddc13c1fe87b09#commitcomment-10899961
- load environment variable for setting robot in joint-state-compressor.l
- [jsk_network_tools] add test for angle-vector/JointStates compress
- [jsk_network_tools] Including pr2_description/upload_pr2.launch in order to set /robot_description
- [jsk_network_tools] Support jaxon in compressing/decompressing angle-vector
- Contributors: Yuki Furuta, Kei Okada, Masaki Murooka, Ryohei Ueda
1.0.66 (2015-04-03)
1.0.65 (2015-04-02)
- [jsk_network_tools] Support effort in joint state compressor/decompressor
- [jsk_network_tools] Latch output topic of highspeed receiver
- [jsk_network_tools] More readable warning about packet miss
- [jsk_network_tools] Add new parameter ~packet_sleep_sum not to sleep per one packet but several packets
- Contributors: Ryohei Ueda
1.0.64 (2015-03-29)
- [jsk_network_tools] Fix typos
- [jsk_network_tools] Add dynamic_reconfigure interface to specify bandwidth of highspeed streamer
- [jsk_network_tools] Defaults to 280 Mbps
- [jsk_network_tools] Decide interval between sending packets based on bandwidth
- [jsk_network_tools] Do not load unused robot models when compress/decompress joint_states
- [jsk_network_tools] Publish the last received time as std_msgs/Time from silverhammer receivers
- [jsk_network_tools] Force to be within 0-255 when compressing joint angles
- [jsk_network_tools] Add diagnostics information to lowspeed streamer and receiver
- [jsk_network_tools] Add diagnostics information to highspeed streamer/receiver
- [jsk_network_tools] Add event_driven mode to lowspeed streamer
- [jsk_network_tools] Add event-driven mode to lowspeed streamer
- Contributors: Ryohei Ueda
1.0.63 (2015-02-19)
1.0.62 (2015-02-17)
- [jsk_network_tools] Add ~packet_interval to highspeed streamer to avoid consuming too much bandwidth
- [jsk_network_tools] latch output of joint-state-decompressor.l
- [jsk_network_tools] Support messages which has longer joints than robot model
- [jsk_network_tools] Publish the last time to send/receive messages
- Contributors: Ryohei Ueda
1.0.61 (2015-02-11)
- [jsk_network_tools] Enable unit test
- [jsk_network_tools] Add unittest about ROS<-->UDP message conversion
- [jsk_network_tools] Fix for uint32 data
- [jsk_network_tools] Fix how to resolve uint8 array
- [jsk_network_tools] Update sample of joint states compressor
- [jsk_network_tools] Fix compressing joint-angles of infinite joint
- Contributors: Ryohei Ueda
1.0.60 (2015-02-03)
1.0.59 (2015-02-03)
- [jsk_network_tools] Add euslisp script to compress/decompres joint states. Originally implemented in jsk_pr2_startup by Y.Furuta
- [jsk_topic_tools] Add pesimistic mode for highspeed receiver
- add param to set rate
- [jsk_network_tools] Support run silverhammer_highspeed_receiver.py without topic_prefix
- [jsk_network_tools] Add script to check size in lowspeed network
- [jsk_network_tools] Add openni2 sample for highspeed streaming using silverhammer toolkit and recover message if possible of missing packets
- [jsk_network_tools] use png images for documentation
- [jsk_network_tools] Simpler implementation of lowspeed communication and update document. Bang Bang!
- [jsk_network_tools] Add documentation about limited network communication
- [jsk_network_tools] Script for DRC-highspeed-link communication
- [jsk_network_tools] Fix typo: OSC -> OCS
- [jsk_network_tools] for Low-bandwidth environment, add silverhammer toolset. You can communicate between two ROS-neworks over low-bandwidth network like DRC final.
- Contributors: Ryohei Ueda, Yusuke Furuta
1.0.58 (2015-01-07)
1.0.57 (2014-12-23)
1.0.56 (2014-12-17)
- plot multiple lines
- add network plot
- Contributors: Yusuke Furuta
1.0.55 (2014-12-09)
- fix msg error in heartbeat
- add description
- add parameter to set hz
- Contributors: Yusuke Furuta
1.0.54 (2014-11-15)
1.0.53 (2014-11-01)
1.0.52 (2014-10-23)
1.0.51 (2014-10-20)
1.0.50 (2014-10-20)
1.0.49 (2014-10-13)
1.0.48 (2014-10-12)
1.0.47 (2014-10-08)
- Contributors: Yusuke Furuta
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| std_msgs | |
| message_generation | |
| sensor_msgs | |
| rostest | |
| diagnostic_msgs | |
| diagnostic_updater | |
| dynamic_reconfigure | |
| roscpp | |
| rospy | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_common | |
| jsk_tools |
Launch files
- test/silverhammer_lowspeed_load_test_fc.launch
- test/silverhammer_lowspeed_load_test_ocs.launch
- launch/simple_silverhammer_openni_sample.launch
- launch/simple_silverhammer_internal_buffer_openni_sample.launch
- launch/joint_state_compress_sample.launch
-
- Y_DIFF [default: 0]
- launch/wifi_status.launch
-
- network_interface [default: wlan0]
- warning_quality [default: 0.4]
- update_rate [default: 1.0]
- launch/simple_silverhammer_sample.launch