Package Summary
| Version | 0.20.9 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-05-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Audrow Nash
- Michael Jeronimo
Authors
- Karsten Knese
- Mabel Zhang
Changelog for package dummy_map_server
0.20.9 (2026-03-24)
0.20.8 (2026-01-09)
0.20.7 (2025-11-12)
0.20.6 (2025-09-17)
0.20.5 (2024-07-26)
0.20.4 (2024-05-15)
0.20.3 (2023-01-10)
0.20.2 (2022-05-10)
0.20.1 (2022-04-08)
0.20.0 (2022-03-01)
0.19.0 (2022-01-14)
0.18.0 (2021-12-17)
- Update maintainers to Audrow Nash and Michael Jeronimo (#543)
- Contributors: Audrow Nash
0.17.0 (2021-10-18)
0.16.0 (2021-08-11)
0.15.0 (2021-05-14)
0.14.2 (2021-04-26)
0.14.1 (2021-04-19)
0.14.0 (2021-04-06)
0.13.0 (2021-03-25)
0.12.1 (2021-03-18)
0.12.0 (2021-01-25)
0.11.0 (2020-12-10)
- Update the package.xml files with the latest Open Robotics maintainers (#466)
- Contributors: Michael Jeronimo
0.10.1 (2020-09-21)
0.10.0 (2020-06-17)
0.9.3 (2020-06-01)
0.9.2 (2020-05-26)
0.9.1 (2020-05-12)
0.9.0 (2020-4-30)
0.8.4 (2019-11-19)
0.8.3 (2019-11-11)
0.8.2 (2019-11-08)
0.8.1 (2019-10-23)
0.8.0 (2019-09-26)
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples (#361)
- Contributors: Chris Lalancette
0.7.5 (2019-05-29)
0.7.4 (2019-05-20)
0.7.3 (2019-05-10)
0.7.2 (2019-05-08)
- changes to avoid deprecated API's (#332)
- Corrected publish calls with shared_ptr signature (#327)
- Contributors: William Woodall, ivanpauno
0.7.1 (2019-04-26)
0.7.0 (2019-04-14)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.33.11 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2026-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Aditya Pande
- Audrow Nash
Authors
- Karsten Knese
- Mabel Zhang
What Is This?
This demo creates and runs a ROS 2 node, dummy_map_server, that publishes nav_msgs::msg::OccupancyGrid on a ROS 2 publisher topic, /map.
dummy_map_server is also a dependency of dummy_robot_bringup.
Please refer to dummy_robot_bringup.
What Is An Occupancy Grid?
An occupancy grid can be thought of as a map of an environment that has been divided into grid cells, where each grid cell is either occupied or unoccupied (in advanced applications, they can have other states, too).
This map of occupied and unoccupied grid cells can be used to help a robot navigate a space, for example to drive through a room with furniture.
If a robot is navigating a new room, however, there may also be grid cells that are marked as unknown, until that area is explored.
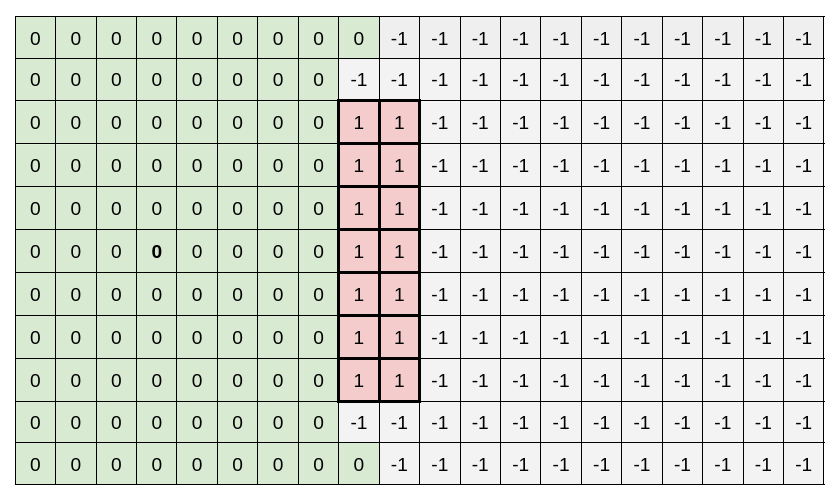
These different states are often stored in the occupancy grid as integers, for example:
:warning: Note that the integer within a cell is application-specific and can go beyond -1 and 1.
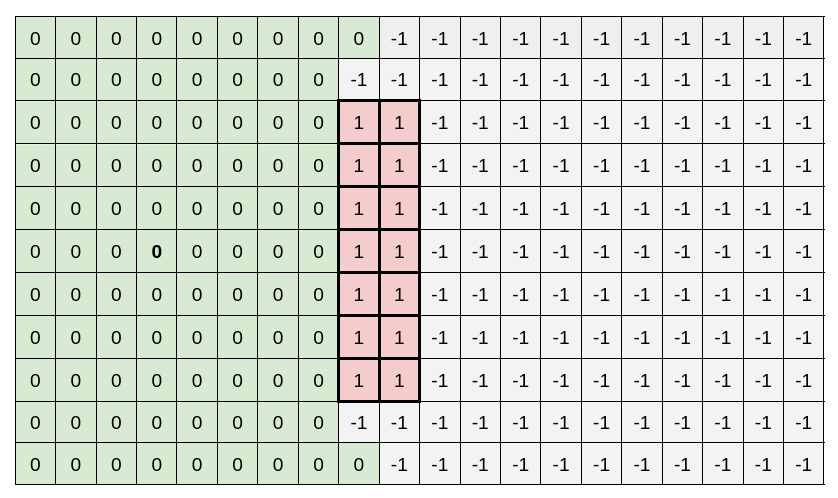
-1 represents unknown spaces.
0 represents unoccupied spaces.
1 represents occupied spaces.
The illustration above shows an example of an occupancy grid where the bolded integer indicates the position of a robot with a lidar sensor mounted on top of it and the red-colored grid cells indicate an obstacle such as a wall.
Build
colcon build --packages-up-to dummy_map_server
Run
ros2 run dummy_map_server dummy_map_server
Verify
A similar terminal output should be seen after running ros2 run dummy_map_server and the following commands:
ros2 topic echo /map
# Terminal Output
header:
stamp:
sec: 1658559453
nanosec: 308405010
frame_id: world
info:
map_load_time:
sec: 0
nanosec: 0
resolution: 0.10000000149011612
width: 100
height: 100
origin:
position:
x: -5.0
y: -5.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
data:
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- '...'
---
References
-
nav_msgs::msg::OccupancyGridMessage Format: https://github.com/ros2/common_interfaces/blob/rolling/nav_msgs/msg/OccupancyGrid.msg
Changelog for package dummy_map_server
0.33.11 (2026-06-02)
0.33.10 (2026-03-24)
0.33.9 (2026-01-09)
0.33.8 (2025-11-12)
0.33.7 (2025-09-17)
0.33.6 (2025-08-06)
0.33.5 (2024-09-06)
0.33.4 (2024-06-27)
0.33.3 (2024-05-13)
0.33.2 (2024-03-28)
- Update maintainer list in package.xml files (#665)
- Contributors: Michael Jeronimo
0.33.1 (2024-02-07)
0.33.0 (2024-01-24)
0.32.1 (2023-12-26)
0.32.0 (2023-11-06)
0.31.1 (2023-09-07)
0.31.0 (2023-08-21)
0.30.1 (2023-07-11)
0.30.0 (2023-06-12)
0.29.0 (2023-06-07)
0.28.1 (2023-05-11)
0.28.0 (2023-04-27)
0.27.0 (2023-04-13)
- Change all ROS2 -> ROS 2. (#610)
- Contributors: Chris Lalancette
0.26.0 (2023-04-11)
0.25.0 (2023-03-01)
0.24.1 (2023-02-24)
0.24.0 (2023-02-14)
- Update the demos to C++17. (#594)
- [rolling] Update maintainers - 2022-11-07 (#589)
- Contributors: Audrow Nash, Chris Lalancette
0.23.0 (2022-11-02)
0.22.0 (2022-09-13)
- Added README.md for dummy_map_server (#572)
- Contributors: Gary Bey
0.21.0 (2022-04-29)
0.20.1 (2022-04-08)
0.20.0 (2022-03-01)
0.19.0 (2022-01-14)
0.18.0 (2021-12-17)
- Update maintainers to Audrow Nash and Michael Jeronimo (#543)
- Contributors: Audrow Nash
0.17.0 (2021-10-18)
0.16.0 (2021-08-11)
0.15.0 (2021-05-14)
0.14.2 (2021-04-26)
0.14.1 (2021-04-19)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.36.5 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | kilted |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Aditya Pande
- Audrow Nash
Authors
- Karsten Knese
- Mabel Zhang
What Is This?
This demo creates and runs a ROS 2 node, dummy_map_server, that publishes nav_msgs::msg::OccupancyGrid on a ROS 2 publisher topic, /map.
dummy_map_server is also a dependency of dummy_robot_bringup.
Please refer to dummy_robot_bringup.
What Is An Occupancy Grid?
An occupancy grid can be thought of as a map of an environment that has been divided into grid cells, where each grid cell is either occupied or unoccupied (in advanced applications, they can have other states, too).
This map of occupied and unoccupied grid cells can be used to help a robot navigate a space, for example to drive through a room with furniture.
If a robot is navigating a new room, however, there may also be grid cells that are marked as unknown, until that area is explored.
These different states are often stored in the occupancy grid as integers, for example:
:warning: Note that the integer within a cell is application-specific and can go beyond -1 and 1.
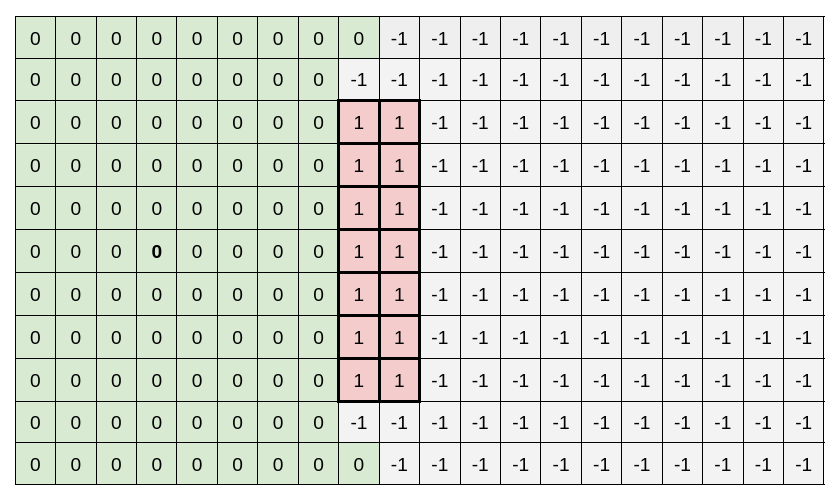
-1 represents unknown spaces.
0 represents unoccupied spaces.
1 represents occupied spaces.
The illustration above shows an example of an occupancy grid where the bolded integer indicates the position of a robot with a lidar sensor mounted on top of it and the red-colored grid cells indicate an obstacle such as a wall.
Build
colcon build --packages-up-to dummy_map_server
Run
ros2 run dummy_map_server dummy_map_server
Verify
A similar terminal output should be seen after running ros2 run dummy_map_server and the following commands:
ros2 topic echo /map
# Terminal Output
header:
stamp:
sec: 1658559453
nanosec: 308405010
frame_id: world
info:
map_load_time:
sec: 0
nanosec: 0
resolution: 0.10000000149011612
width: 100
height: 100
origin:
position:
x: -5.0
y: -5.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
data:
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- '...'
---
References
-
nav_msgs::msg::OccupancyGridMessage Format: https://github.com/ros2/common_interfaces/blob/rolling/nav_msgs/msg/OccupancyGrid.msg
Changelog for package dummy_map_server
0.36.5 (2026-03-24)
0.36.4 (2026-01-09)
0.36.3 (2025-11-12)
0.36.2 (2025-09-17)
0.36.1 (2025-06-23)
0.36.0 (2025-04-25)
- Uniform CMAKE min VERSION (#714) demo_nodes_cpp/CMakeLists.txt require cmake min version 3.12 other modules cmake 3.5. It is proposed to standardize with version 3.12. This also fixes cmake <3.10 deprecation warnings
- Use target_link_libraries instead of ament_target_dependencies (#707)
- Contributors: Shane Loretz, mosfet80
0.35.1 (2024-11-20)
0.35.0 (2024-10-03)
0.34.2 (2024-07-29)
0.34.1 (2024-06-17)
0.34.0 (2024-04-26)
0.33.2 (2024-03-28)
- Update maintainer list in package.xml files (#665)
- Contributors: Michael Jeronimo
0.33.1 (2024-02-07)
0.33.0 (2024-01-24)
0.32.1 (2023-12-26)
0.32.0 (2023-11-06)
0.31.1 (2023-09-07)
0.31.0 (2023-08-21)
0.30.1 (2023-07-11)
0.30.0 (2023-06-12)
0.29.0 (2023-06-07)
0.28.1 (2023-05-11)
0.28.0 (2023-04-27)
0.27.0 (2023-04-13)
- Change all ROS2 -> ROS 2. (#610)
- Contributors: Chris Lalancette
0.26.0 (2023-04-11)
0.25.0 (2023-03-01)
0.24.1 (2023-02-24)
0.24.0 (2023-02-14)
- Update the demos to C++17. (#594)
- [rolling] Update maintainers - 2022-11-07 (#589)
- Contributors: Audrow Nash, Chris Lalancette
0.23.0 (2022-11-02)
0.22.0 (2022-09-13)
- Added README.md for dummy_map_server (#572)
- Contributors: Gary Bey
0.21.0 (2022-04-29)
0.20.1 (2022-04-08)
0.20.0 (2022-03-01)
0.19.0 (2022-01-14)
0.18.0 (2021-12-17)
- Update maintainers to Audrow Nash and Michael Jeronimo
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.37.9 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | lyrical |
| Last Updated | 2026-07-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Aditya Pande
- Audrow Nash
Authors
- Karsten Knese
- Mabel Zhang
What Is This?
This demo creates and runs a ROS 2 node, dummy_map_server, that publishes nav_msgs::msg::OccupancyGrid on a ROS 2 publisher topic, /map.
dummy_map_server is also a dependency of dummy_robot_bringup.
Please refer to dummy_robot_bringup.
What Is An Occupancy Grid?
An occupancy grid can be thought of as a map of an environment that has been divided into grid cells, where each grid cell is either occupied or unoccupied (in advanced applications, they can have other states, too).
This map of occupied and unoccupied grid cells can be used to help a robot navigate a space, for example to drive through a room with furniture.
If a robot is navigating a new room, however, there may also be grid cells that are marked as unknown, until that area is explored.
These different states are often stored in the occupancy grid as integers, for example:
:warning: Note that the integer within a cell is application-specific and can go beyond -1 and 1.
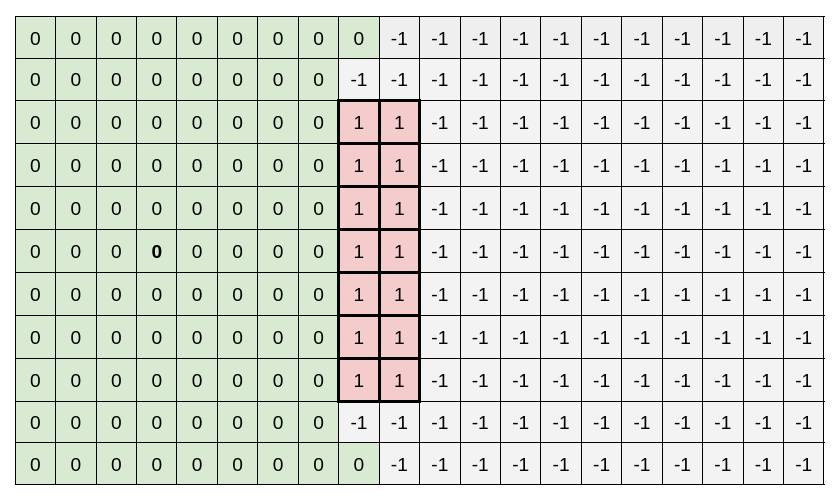
-1 represents unknown spaces.
0 represents unoccupied spaces.
1 represents occupied spaces.
The illustration above shows an example of an occupancy grid where the bolded integer indicates the position of a robot with a lidar sensor mounted on top of it and the red-colored grid cells indicate an obstacle such as a wall.
Build
colcon build --packages-up-to dummy_map_server
Run
ros2 run dummy_map_server dummy_map_server
Verify
A similar terminal output should be seen after running ros2 run dummy_map_server and the following commands:
ros2 topic echo /map
# Terminal Output
header:
stamp:
sec: 1658559453
nanosec: 308405010
frame_id: world
info:
map_load_time:
sec: 0
nanosec: 0
resolution: 0.10000000149011612
width: 100
height: 100
origin:
position:
x: -5.0
y: -5.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
data:
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- '...'
---
References
-
nav_msgs::msg::OccupancyGridMessage Format: https://github.com/ros2/common_interfaces/blob/rolling/nav_msgs/msg/OccupancyGrid.msg
Changelog for package dummy_map_server
0.37.9 (2026-07-06)
0.37.7 (2026-03-24)
- Use new ROSIDL aggregate CMake target (#781)
- Contributors: Emerson Knapp
0.37.6 (2026-02-16)
0.37.5 (2026-01-09)
0.37.4 (2025-11-12)
0.37.3 (2025-09-17)
- get rid of deprecated rclcpp::spin_some(). (#734)
- Contributors: Tomoya Fujita
0.37.2 (2025-07-29)
0.37.1 (2025-06-23)
0.37.0 (2025-04-25)
0.36.0 (2025-04-25)
- Uniform CMAKE min VERSION (#714) demo_nodes_cpp/CMakeLists.txt require cmake min version 3.12 other modules cmake 3.5. It is proposed to standardize with version 3.12. This also fixes cmake <3.10 deprecation warnings
- Use target_link_libraries instead of ament_target_dependencies (#707)
- Contributors: Shane Loretz, mosfet80
0.35.1 (2024-11-20)
0.35.0 (2024-10-03)
0.34.2 (2024-07-29)
0.34.1 (2024-06-17)
0.34.0 (2024-04-26)
0.33.2 (2024-03-28)
- Update maintainer list in package.xml files (#665)
- Contributors: Michael Jeronimo
0.33.1 (2024-02-07)
0.33.0 (2024-01-24)
0.32.1 (2023-12-26)
0.32.0 (2023-11-06)
0.31.1 (2023-09-07)
0.31.0 (2023-08-21)
0.30.1 (2023-07-11)
0.30.0 (2023-06-12)
0.29.0 (2023-06-07)
0.28.1 (2023-05-11)
0.28.0 (2023-04-27)
0.27.0 (2023-04-13)
- Change all ROS2 -> ROS 2. (#610)
- Contributors: Chris Lalancette
0.26.0 (2023-04-11)
0.25.0 (2023-03-01)
0.24.1 (2023-02-24)
0.24.0 (2023-02-14)
- Update the demos to C++17. (#594)
- [rolling] Update maintainers - 2022-11-07 (#589)
- Contributors: Audrow Nash, Chris Lalancette
0.23.0 (2022-11-02)
0.22.0 (2022-09-13)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.38.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2026-07-23 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Aditya Pande
- Audrow Nash
Authors
- Karsten Knese
- Mabel Zhang
What Is This?
This demo creates and runs a ROS 2 node, dummy_map_server, that publishes nav_msgs::msg::OccupancyGrid on a ROS 2 publisher topic, /map.
dummy_map_server is also a dependency of dummy_robot_bringup.
Please refer to dummy_robot_bringup.
What Is An Occupancy Grid?
An occupancy grid can be thought of as a map of an environment that has been divided into grid cells, where each grid cell is either occupied or unoccupied (in advanced applications, they can have other states, too).
This map of occupied and unoccupied grid cells can be used to help a robot navigate a space, for example to drive through a room with furniture.
If a robot is navigating a new room, however, there may also be grid cells that are marked as unknown, until that area is explored.
These different states are often stored in the occupancy grid as integers, for example:
:warning: Note that the integer within a cell is application-specific and can go beyond -1 and 1.
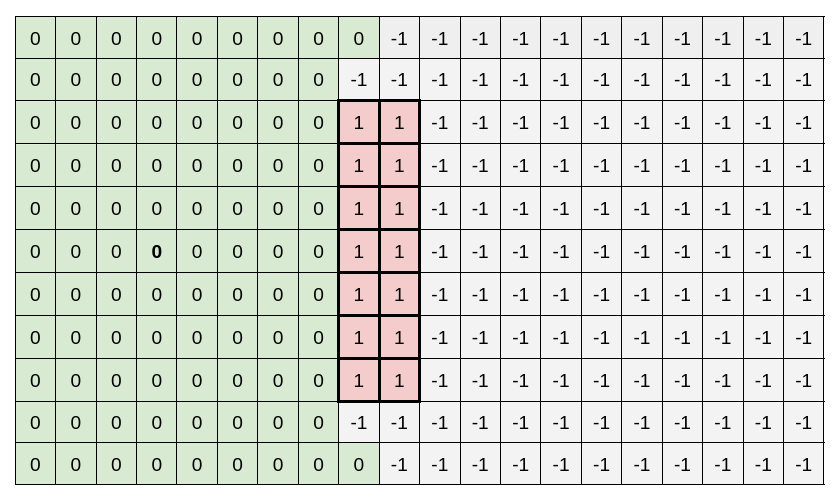
-1 represents unknown spaces.
0 represents unoccupied spaces.
1 represents occupied spaces.
The illustration above shows an example of an occupancy grid where the bolded integer indicates the position of a robot with a lidar sensor mounted on top of it and the red-colored grid cells indicate an obstacle such as a wall.
Build
colcon build --packages-up-to dummy_map_server
Run
ros2 run dummy_map_server dummy_map_server
Verify
A similar terminal output should be seen after running ros2 run dummy_map_server and the following commands:
ros2 topic echo /map
# Terminal Output
header:
stamp:
sec: 1658559453
nanosec: 308405010
frame_id: world
info:
map_load_time:
sec: 0
nanosec: 0
resolution: 0.10000000149011612
width: 100
height: 100
origin:
position:
x: -5.0
y: -5.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
data:
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- '...'
---
References
-
nav_msgs::msg::OccupancyGridMessage Format: https://github.com/ros2/common_interfaces/blob/rolling/nav_msgs/msg/OccupancyGrid.msg
Changelog for package dummy_map_server
0.38.0 (2026-05-07)
0.37.7 (2026-03-24)
- Use new ROSIDL aggregate CMake target (#781)
- Contributors: Emerson Knapp
0.37.6 (2026-02-16)
0.37.5 (2026-01-09)
0.37.4 (2025-11-12)
0.37.3 (2025-09-17)
- get rid of deprecated rclcpp::spin_some(). (#734)
- Contributors: Tomoya Fujita
0.37.2 (2025-07-29)
0.37.1 (2025-06-23)
0.37.0 (2025-04-25)
0.36.0 (2025-04-25)
- Uniform CMAKE min VERSION (#714) demo_nodes_cpp/CMakeLists.txt require cmake min version 3.12 other modules cmake 3.5. It is proposed to standardize with version 3.12. This also fixes cmake <3.10 deprecation warnings
- Use target_link_libraries instead of ament_target_dependencies (#707)
- Contributors: Shane Loretz, mosfet80
0.35.1 (2024-11-20)
0.35.0 (2024-10-03)
0.34.2 (2024-07-29)
0.34.1 (2024-06-17)
0.34.0 (2024-04-26)
0.33.2 (2024-03-28)
- Update maintainer list in package.xml files (#665)
- Contributors: Michael Jeronimo
0.33.1 (2024-02-07)
0.33.0 (2024-01-24)
0.32.1 (2023-12-26)
0.32.0 (2023-11-06)
0.31.1 (2023-09-07)
0.31.0 (2023-08-21)
0.30.1 (2023-07-11)
0.30.0 (2023-06-12)
0.29.0 (2023-06-07)
0.28.1 (2023-05-11)
0.28.0 (2023-04-27)
0.27.0 (2023-04-13)
- Change all ROS2 -> ROS 2. (#610)
- Contributors: Chris Lalancette
0.26.0 (2023-04-11)
0.25.0 (2023-03-01)
0.24.1 (2023-02-24)
0.24.0 (2023-02-14)
- Update the demos to C++17. (#594)
- [rolling] Update maintainers - 2022-11-07 (#589)
- Contributors: Audrow Nash, Chris Lalancette
0.23.0 (2022-11-02)
0.22.0 (2022-09-13)
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| nav_msgs | |
| rclcpp | |
| ament_cmake | |
| ament_cmake_ros_core | |
| ament_cmake_gtest | |
| ament_lint_auto | |
| ament_lint_common |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange

|
dummy_map_server package from demos repocomposition demo_nodes_cpp demo_nodes_cpp_native demo_nodes_py dummy_map_server dummy_robot_bringup dummy_sensors image_tools intra_process_demo lifecycle logging_demo pendulum_control pendulum_msgs topic_monitor |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | ardent |
| Last Updated | 2017-12-09 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Karsten Knese
Authors
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
|
|
dummy_map_server package from demos repocomposition demo_nodes_cpp demo_nodes_cpp_native demo_nodes_py dummy_map_server dummy_robot_bringup dummy_sensors image_tools intra_process_demo lifecycle logging_demo pendulum_control pendulum_msgs topic_monitor |
ROS Distro
|
Package Summary
| Version | 0.5.1 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | bouncy |
| Last Updated | 2018-10-30 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Karsten Knese
Authors
Changelog for package dummy_map_server
0.5.1 (2018-06-28)
0.5.0 (2018-06-27)
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
|
|
dummy_map_server package from demos repocomposition demo_nodes_cpp demo_nodes_cpp_native demo_nodes_py dummy_map_server dummy_robot_bringup dummy_sensors image_tools intra_process_demo lifecycle logging_demo pendulum_control pendulum_msgs topic_monitor |
ROS Distro
|
Package Summary
| Version | 0.6.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | crystal |
| Last Updated | 2019-01-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Karsten Knese
Authors
Changelog for package dummy_map_server
0.6.2 (2019-01-15)
0.6.1 (2018-12-13)
0.6.0 (2018-12-07)
0.5.1 (2018-06-28)
0.5.0 (2018-06-27)
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.8.4 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | eloquent |
| Last Updated | 2020-11-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Mabel Zhang
- Michael Jeronimo
Authors
- Karsten Knese
Changelog for package dummy_map_server
0.8.4 (2019-11-19)
0.8.3 (2019-11-11)
0.8.2 (2019-11-08)
0.8.1 (2019-10-23)
0.8.0 (2019-09-26)
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples (#361)
- Contributors: Chris Lalancette
0.7.5 (2019-05-29)
0.7.4 (2019-05-20)
0.7.3 (2019-05-10)
0.7.2 (2019-05-08)
- changes to avoid deprecated API's (#332)
- Corrected publish calls with shared_ptr signature (#327)
- Contributors: William Woodall, ivanpauno
0.7.1 (2019-04-26)
0.7.0 (2019-04-14)
0.6.2 (2019-01-15)
0.6.1 (2018-12-13)
0.6.0 (2018-12-07)
0.5.1 (2018-06-28)
0.5.0 (2018-06-27)
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
|
|
dummy_map_server package from demos repoaction_tutorials composition demo_nodes_cpp demo_nodes_cpp_native demo_nodes_py dummy_map_server dummy_robot_bringup dummy_sensors image_tools intra_process_demo lifecycle logging_demo pendulum_control pendulum_msgs quality_of_service_demo_cpp quality_of_service_demo_py topic_monitor |
ROS Distro
|
Package Summary
| Version | 0.7.9 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | dashing |
| Last Updated | 2020-10-28 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Mabel Zhang
- Michael Jeronimo
Authors
- Karsten Knese
Changelog for package dummy_map_server
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples. (#361)
- Contributors: Chris Lalancette
0.7.5 (2019-05-29)
0.7.4 (2019-05-20)
0.7.3 (2019-05-10)
0.7.2 (2019-05-08)
- changes to avoid deprecated API's (#332)
- Corrected publish calls with shared_ptr signature (#327)
- Contributors: William Woodall, ivanpauno
0.7.1 (2019-04-26)
0.7.0 (2019-04-14)
0.6.2 (2019-01-15)
0.6.1 (2018-12-13)
0.6.0 (2018-12-07)
0.5.1 (2018-06-28)
0.5.0 (2018-06-27)
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.14.4 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | galactic |
| Last Updated | 2022-12-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Mabel Zhang
- Michael Jeronimo
Authors
- Karsten Knese
Changelog for package dummy_map_server
0.14.4 (2022-12-06)
0.14.3 (2021-05-10)
0.14.2 (2021-04-26)
0.14.1 (2021-04-19)
0.14.0 (2021-04-06)
0.13.0 (2021-03-25)
0.12.1 (2021-03-18)
0.12.0 (2021-01-25)
0.11.0 (2020-12-10)
- Update the package.xml files with the latest Open Robotics maintainers (#466)
- Contributors: Michael Jeronimo
0.10.1 (2020-09-21)
0.10.0 (2020-06-17)
0.9.3 (2020-06-01)
0.9.2 (2020-05-26)
0.9.1 (2020-05-12)
0.9.0 (2020-4-30)
0.8.4 (2019-11-19)
0.8.3 (2019-11-11)
0.8.2 (2019-11-08)
0.8.1 (2019-10-23)
0.8.0 (2019-09-26)
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples (#361)
- Contributors: Chris Lalancette
0.7.5 (2019-05-29)
0.7.4 (2019-05-20)
0.7.3 (2019-05-10)
0.7.2 (2019-05-08)
- changes to avoid deprecated API's (#332)
- Corrected publish calls with shared_ptr signature (#327)
- Contributors: William Woodall, ivanpauno
0.7.1 (2019-04-26)
0.7.0 (2019-04-14)
0.6.2 (2019-01-15)
0.6.1 (2018-12-13)
0.6.0 (2018-12-07)
0.5.1 (2018-06-28)
0.5.0 (2018-06-27)
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.9.4 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | foxy |
| Last Updated | 2022-07-25 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Mabel Zhang
- Michael Jeronimo
Authors
- Karsten Knese
Changelog for package dummy_map_server
0.9.4 (2022-07-25)
- Update maintainer list for Foxy (#471)
- Contributors: Michael Jeronimo
0.9.3 (2020-06-01)
0.9.2 (2020-05-26)
0.9.1 (2020-05-12)
0.9.0 (2020-4-30)
0.8.4 (2019-11-19)
0.8.3 (2019-11-11)
0.8.2 (2019-11-08)
0.8.1 (2019-10-23)
0.8.0 (2019-09-26)
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples (#361)
- Contributors: Chris Lalancette
0.7.5 (2019-05-29)
0.7.4 (2019-05-20)
0.7.3 (2019-05-10)
0.7.2 (2019-05-08)
- changes to avoid deprecated API's (#332)
- Corrected publish calls with shared_ptr signature (#327)
- Contributors: William Woodall, ivanpauno
0.7.1 (2019-04-26)
0.7.0 (2019-04-14)
0.6.2 (2019-01-15)
0.6.1 (2018-12-13)
0.6.0 (2018-12-07)
0.5.1 (2018-06-28)
0.5.0 (2018-06-27)
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.27.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2024-07-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Aditya Pande
- Audrow Nash
- Michael Jeronimo
Authors
- Karsten Knese
- Mabel Zhang
What Is This?
This demo creates and runs a ROS 2 node, dummy_map_server, that publishes nav_msgs::msg::OccupancyGrid on a ROS 2 publisher topic, /map.
dummy_map_server is also a dependency of dummy_robot_bringup.
Please refer to dummy_robot_bringup.
What Is An Occupancy Grid?
An occupancy grid can be thought of as a map of an environment that has been divided into grid cells, where each grid cell is either occupied or unoccupied (in advanced applications, they can have other states, too).
This map of occupied and unoccupied grid cells can be used to help a robot navigate a space, for example to drive through a room with furniture.
If a robot is navigating a new room, however, there may also be grid cells that are marked as unknown, until that area is explored.
These different states are often stored in the occupancy grid as integers, for example:
:warning: Note that the integer within a cell is application-specific and can go beyond -1 and 1.
-1 represents unknown spaces.
0 represents unoccupied spaces.
1 represents occupied spaces.
The illustration above shows an example of an occupancy grid where the bolded integer indicates the position of a robot with a lidar sensor mounted on top of it and the red-colored grid cells indicate an obstacle such as a wall.
Build
colcon build --packages-up-to dummy_map_server
Run
ros2 run dummy_map_server dummy_map_server
Verify
A similar terminal output should be seen after running ros2 run dummy_map_server and the following commands:
ros2 topic echo /map
# Terminal Output
header:
stamp:
sec: 1658559453
nanosec: 308405010
frame_id: world
info:
map_load_time:
sec: 0
nanosec: 0
resolution: 0.10000000149011612
width: 100
height: 100
origin:
position:
x: -5.0
y: -5.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
data:
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- -1
- '...'
---
References
-
nav_msgs::msg::OccupancyGridMessage Format: https://github.com/ros2/common_interfaces/blob/rolling/nav_msgs/msg/OccupancyGrid.msg
Changelog for package dummy_map_server
0.27.2 (2024-07-10)
0.27.1 (2023-05-11)
0.27.0 (2023-04-13)
- Change all ROS2 -> ROS 2. (#610)
- Contributors: Chris Lalancette
0.26.0 (2023-04-11)
0.25.0 (2023-03-01)
0.24.1 (2023-02-24)
0.24.0 (2023-02-14)
- Update the demos to C++17. (#594)
- [rolling] Update maintainers - 2022-11-07 (#589)
- Contributors: Audrow Nash, Chris Lalancette
0.23.0 (2022-11-02)
0.22.0 (2022-09-13)
- Added README.md for dummy_map_server (#572)
- Contributors: Gary Bey
0.21.0 (2022-04-29)
0.20.1 (2022-04-08)
0.20.0 (2022-03-01)
0.19.0 (2022-01-14)
0.18.0 (2021-12-17)
- Update maintainers to Audrow Nash and Michael Jeronimo (#543)
- Contributors: Audrow Nash
0.17.0 (2021-10-18)
0.16.0 (2021-08-11)
0.15.0 (2021-05-14)
0.14.2 (2021-04-26)
0.14.1 (2021-04-19)
0.14.0 (2021-04-06)
0.13.0 (2021-03-25)
0.12.1 (2021-03-18)
0.12.0 (2021-01-25)
0.11.0 (2020-12-10)
- Update the package.xml files with the latest Open Robotics maintainers (#466)
- Contributors: Michael Jeronimo
0.10.1 (2020-09-21)
0.10.0 (2020-06-17)
0.9.3 (2020-06-01)
0.9.2 (2020-05-26)
0.9.1 (2020-05-12)
0.9.0 (2020-4-30)
0.8.4 (2019-11-19)
0.8.3 (2019-11-11)
0.8.2 (2019-11-08)
0.8.1 (2019-10-23)
0.8.0 (2019-09-26)
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples (#361)
- Contributors: Chris Lalancette
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.20.9 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-05-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Audrow Nash
- Michael Jeronimo
Authors
- Karsten Knese
- Mabel Zhang
Changelog for package dummy_map_server
0.20.9 (2026-03-24)
0.20.8 (2026-01-09)
0.20.7 (2025-11-12)
0.20.6 (2025-09-17)
0.20.5 (2024-07-26)
0.20.4 (2024-05-15)
0.20.3 (2023-01-10)
0.20.2 (2022-05-10)
0.20.1 (2022-04-08)
0.20.0 (2022-03-01)
0.19.0 (2022-01-14)
0.18.0 (2021-12-17)
- Update maintainers to Audrow Nash and Michael Jeronimo (#543)
- Contributors: Audrow Nash
0.17.0 (2021-10-18)
0.16.0 (2021-08-11)
0.15.0 (2021-05-14)
0.14.2 (2021-04-26)
0.14.1 (2021-04-19)
0.14.0 (2021-04-06)
0.13.0 (2021-03-25)
0.12.1 (2021-03-18)
0.12.0 (2021-01-25)
0.11.0 (2020-12-10)
- Update the package.xml files with the latest Open Robotics maintainers (#466)
- Contributors: Michael Jeronimo
0.10.1 (2020-09-21)
0.10.0 (2020-06-17)
0.9.3 (2020-06-01)
0.9.2 (2020-05-26)
0.9.1 (2020-05-12)
0.9.0 (2020-4-30)
0.8.4 (2019-11-19)
0.8.3 (2019-11-11)
0.8.2 (2019-11-08)
0.8.1 (2019-10-23)
0.8.0 (2019-09-26)
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples (#361)
- Contributors: Chris Lalancette
0.7.5 (2019-05-29)
0.7.4 (2019-05-20)
0.7.3 (2019-05-10)
0.7.2 (2019-05-08)
- changes to avoid deprecated API's (#332)
- Corrected publish calls with shared_ptr signature (#327)
- Contributors: William Woodall, ivanpauno
0.7.1 (2019-04-26)
0.7.0 (2019-04-14)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.20.9 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-05-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Audrow Nash
- Michael Jeronimo
Authors
- Karsten Knese
- Mabel Zhang
Changelog for package dummy_map_server
0.20.9 (2026-03-24)
0.20.8 (2026-01-09)
0.20.7 (2025-11-12)
0.20.6 (2025-09-17)
0.20.5 (2024-07-26)
0.20.4 (2024-05-15)
0.20.3 (2023-01-10)
0.20.2 (2022-05-10)
0.20.1 (2022-04-08)
0.20.0 (2022-03-01)
0.19.0 (2022-01-14)
0.18.0 (2021-12-17)
- Update maintainers to Audrow Nash and Michael Jeronimo (#543)
- Contributors: Audrow Nash
0.17.0 (2021-10-18)
0.16.0 (2021-08-11)
0.15.0 (2021-05-14)
0.14.2 (2021-04-26)
0.14.1 (2021-04-19)
0.14.0 (2021-04-06)
0.13.0 (2021-03-25)
0.12.1 (2021-03-18)
0.12.0 (2021-01-25)
0.11.0 (2020-12-10)
- Update the package.xml files with the latest Open Robotics maintainers (#466)
- Contributors: Michael Jeronimo
0.10.1 (2020-09-21)
0.10.0 (2020-06-17)
0.9.3 (2020-06-01)
0.9.2 (2020-05-26)
0.9.1 (2020-05-12)
0.9.0 (2020-4-30)
0.8.4 (2019-11-19)
0.8.3 (2019-11-11)
0.8.2 (2019-11-08)
0.8.1 (2019-10-23)
0.8.0 (2019-09-26)
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples (#361)
- Contributors: Chris Lalancette
0.7.5 (2019-05-29)
0.7.4 (2019-05-20)
0.7.3 (2019-05-10)
0.7.2 (2019-05-08)
- changes to avoid deprecated API's (#332)
- Corrected publish calls with shared_ptr signature (#327)
- Contributors: William Woodall, ivanpauno
0.7.1 (2019-04-26)
0.7.0 (2019-04-14)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.20.9 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-05-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Audrow Nash
- Michael Jeronimo
Authors
- Karsten Knese
- Mabel Zhang
Changelog for package dummy_map_server
0.20.9 (2026-03-24)
0.20.8 (2026-01-09)
0.20.7 (2025-11-12)
0.20.6 (2025-09-17)
0.20.5 (2024-07-26)
0.20.4 (2024-05-15)
0.20.3 (2023-01-10)
0.20.2 (2022-05-10)
0.20.1 (2022-04-08)
0.20.0 (2022-03-01)
0.19.0 (2022-01-14)
0.18.0 (2021-12-17)
- Update maintainers to Audrow Nash and Michael Jeronimo (#543)
- Contributors: Audrow Nash
0.17.0 (2021-10-18)
0.16.0 (2021-08-11)
0.15.0 (2021-05-14)
0.14.2 (2021-04-26)
0.14.1 (2021-04-19)
0.14.0 (2021-04-06)
0.13.0 (2021-03-25)
0.12.1 (2021-03-18)
0.12.0 (2021-01-25)
0.11.0 (2020-12-10)
- Update the package.xml files with the latest Open Robotics maintainers (#466)
- Contributors: Michael Jeronimo
0.10.1 (2020-09-21)
0.10.0 (2020-06-17)
0.9.3 (2020-06-01)
0.9.2 (2020-05-26)
0.9.1 (2020-05-12)
0.9.0 (2020-4-30)
0.8.4 (2019-11-19)
0.8.3 (2019-11-11)
0.8.2 (2019-11-08)
0.8.1 (2019-10-23)
0.8.0 (2019-09-26)
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples (#361)
- Contributors: Chris Lalancette
0.7.5 (2019-05-29)
0.7.4 (2019-05-20)
0.7.3 (2019-05-10)
0.7.2 (2019-05-08)
- changes to avoid deprecated API's (#332)
- Corrected publish calls with shared_ptr signature (#327)
- Contributors: William Woodall, ivanpauno
0.7.1 (2019-04-26)
0.7.0 (2019-04-14)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.20.9 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-05-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Audrow Nash
- Michael Jeronimo
Authors
- Karsten Knese
- Mabel Zhang
Changelog for package dummy_map_server
0.20.9 (2026-03-24)
0.20.8 (2026-01-09)
0.20.7 (2025-11-12)
0.20.6 (2025-09-17)
0.20.5 (2024-07-26)
0.20.4 (2024-05-15)
0.20.3 (2023-01-10)
0.20.2 (2022-05-10)
0.20.1 (2022-04-08)
0.20.0 (2022-03-01)
0.19.0 (2022-01-14)
0.18.0 (2021-12-17)
- Update maintainers to Audrow Nash and Michael Jeronimo (#543)
- Contributors: Audrow Nash
0.17.0 (2021-10-18)
0.16.0 (2021-08-11)
0.15.0 (2021-05-14)
0.14.2 (2021-04-26)
0.14.1 (2021-04-19)
0.14.0 (2021-04-06)
0.13.0 (2021-03-25)
0.12.1 (2021-03-18)
0.12.0 (2021-01-25)
0.11.0 (2020-12-10)
- Update the package.xml files with the latest Open Robotics maintainers (#466)
- Contributors: Michael Jeronimo
0.10.1 (2020-09-21)
0.10.0 (2020-06-17)
0.9.3 (2020-06-01)
0.9.2 (2020-05-26)
0.9.1 (2020-05-12)
0.9.0 (2020-4-30)
0.8.4 (2019-11-19)
0.8.3 (2019-11-11)
0.8.2 (2019-11-08)
0.8.1 (2019-10-23)
0.8.0 (2019-09-26)
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples (#361)
- Contributors: Chris Lalancette
0.7.5 (2019-05-29)
0.7.4 (2019-05-20)
0.7.3 (2019-05-10)
0.7.2 (2019-05-08)
- changes to avoid deprecated API's (#332)
- Corrected publish calls with shared_ptr signature (#327)
- Contributors: William Woodall, ivanpauno
0.7.1 (2019-04-26)
0.7.0 (2019-04-14)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.20.9 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-05-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Audrow Nash
- Michael Jeronimo
Authors
- Karsten Knese
- Mabel Zhang
Changelog for package dummy_map_server
0.20.9 (2026-03-24)
0.20.8 (2026-01-09)
0.20.7 (2025-11-12)
0.20.6 (2025-09-17)
0.20.5 (2024-07-26)
0.20.4 (2024-05-15)
0.20.3 (2023-01-10)
0.20.2 (2022-05-10)
0.20.1 (2022-04-08)
0.20.0 (2022-03-01)
0.19.0 (2022-01-14)
0.18.0 (2021-12-17)
- Update maintainers to Audrow Nash and Michael Jeronimo (#543)
- Contributors: Audrow Nash
0.17.0 (2021-10-18)
0.16.0 (2021-08-11)
0.15.0 (2021-05-14)
0.14.2 (2021-04-26)
0.14.1 (2021-04-19)
0.14.0 (2021-04-06)
0.13.0 (2021-03-25)
0.12.1 (2021-03-18)
0.12.0 (2021-01-25)
0.11.0 (2020-12-10)
- Update the package.xml files with the latest Open Robotics maintainers (#466)
- Contributors: Michael Jeronimo
0.10.1 (2020-09-21)
0.10.0 (2020-06-17)
0.9.3 (2020-06-01)
0.9.2 (2020-05-26)
0.9.1 (2020-05-12)
0.9.0 (2020-4-30)
0.8.4 (2019-11-19)
0.8.3 (2019-11-11)
0.8.2 (2019-11-08)
0.8.1 (2019-10-23)
0.8.0 (2019-09-26)
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples (#361)
- Contributors: Chris Lalancette
0.7.5 (2019-05-29)
0.7.4 (2019-05-20)
0.7.3 (2019-05-10)
0.7.2 (2019-05-08)
- changes to avoid deprecated API's (#332)
- Corrected publish calls with shared_ptr signature (#327)
- Contributors: William Woodall, ivanpauno
0.7.1 (2019-04-26)
0.7.0 (2019-04-14)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.20.9 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-05-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Audrow Nash
- Michael Jeronimo
Authors
- Karsten Knese
- Mabel Zhang
Changelog for package dummy_map_server
0.20.9 (2026-03-24)
0.20.8 (2026-01-09)
0.20.7 (2025-11-12)
0.20.6 (2025-09-17)
0.20.5 (2024-07-26)
0.20.4 (2024-05-15)
0.20.3 (2023-01-10)
0.20.2 (2022-05-10)
0.20.1 (2022-04-08)
0.20.0 (2022-03-01)
0.19.0 (2022-01-14)
0.18.0 (2021-12-17)
- Update maintainers to Audrow Nash and Michael Jeronimo (#543)
- Contributors: Audrow Nash
0.17.0 (2021-10-18)
0.16.0 (2021-08-11)
0.15.0 (2021-05-14)
0.14.2 (2021-04-26)
0.14.1 (2021-04-19)
0.14.0 (2021-04-06)
0.13.0 (2021-03-25)
0.12.1 (2021-03-18)
0.12.0 (2021-01-25)
0.11.0 (2020-12-10)
- Update the package.xml files with the latest Open Robotics maintainers (#466)
- Contributors: Michael Jeronimo
0.10.1 (2020-09-21)
0.10.0 (2020-06-17)
0.9.3 (2020-06-01)
0.9.2 (2020-05-26)
0.9.1 (2020-05-12)
0.9.0 (2020-4-30)
0.8.4 (2019-11-19)
0.8.3 (2019-11-11)
0.8.2 (2019-11-08)
0.8.1 (2019-10-23)
0.8.0 (2019-09-26)
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples (#361)
- Contributors: Chris Lalancette
0.7.5 (2019-05-29)
0.7.4 (2019-05-20)
0.7.3 (2019-05-10)
0.7.2 (2019-05-08)
- changes to avoid deprecated API's (#332)
- Corrected publish calls with shared_ptr signature (#327)
- Contributors: William Woodall, ivanpauno
0.7.1 (2019-04-26)
0.7.0 (2019-04-14)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |
Launch files
Messages
Services
Plugins
Recent questions tagged dummy_map_server at Robotics Stack Exchange
Package Summary
| Version | 0.20.9 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/demos.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2026-05-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Audrow Nash
- Michael Jeronimo
Authors
- Karsten Knese
- Mabel Zhang
Changelog for package dummy_map_server
0.20.9 (2026-03-24)
0.20.8 (2026-01-09)
0.20.7 (2025-11-12)
0.20.6 (2025-09-17)
0.20.5 (2024-07-26)
0.20.4 (2024-05-15)
0.20.3 (2023-01-10)
0.20.2 (2022-05-10)
0.20.1 (2022-04-08)
0.20.0 (2022-03-01)
0.19.0 (2022-01-14)
0.18.0 (2021-12-17)
- Update maintainers to Audrow Nash and Michael Jeronimo (#543)
- Contributors: Audrow Nash
0.17.0 (2021-10-18)
0.16.0 (2021-08-11)
0.15.0 (2021-05-14)
0.14.2 (2021-04-26)
0.14.1 (2021-04-19)
0.14.0 (2021-04-06)
0.13.0 (2021-03-25)
0.12.1 (2021-03-18)
0.12.0 (2021-01-25)
0.11.0 (2020-12-10)
- Update the package.xml files with the latest Open Robotics maintainers (#466)
- Contributors: Michael Jeronimo
0.10.1 (2020-09-21)
0.10.0 (2020-06-17)
0.9.3 (2020-06-01)
0.9.2 (2020-05-26)
0.9.1 (2020-05-12)
0.9.0 (2020-4-30)
0.8.4 (2019-11-19)
0.8.3 (2019-11-11)
0.8.2 (2019-11-08)
0.8.1 (2019-10-23)
0.8.0 (2019-09-26)
0.7.6 (2019-05-30)
- Fix memory leak in the dummy robot examples (#361)
- Contributors: Chris Lalancette
0.7.5 (2019-05-29)
0.7.4 (2019-05-20)
0.7.3 (2019-05-10)
0.7.2 (2019-05-08)
- changes to avoid deprecated API's (#332)
- Corrected publish calls with shared_ptr signature (#327)
- Contributors: William Woodall, ivanpauno
0.7.1 (2019-04-26)
0.7.0 (2019-04-14)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| dummy_robot_bringup | |
| desktop |