
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library




![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
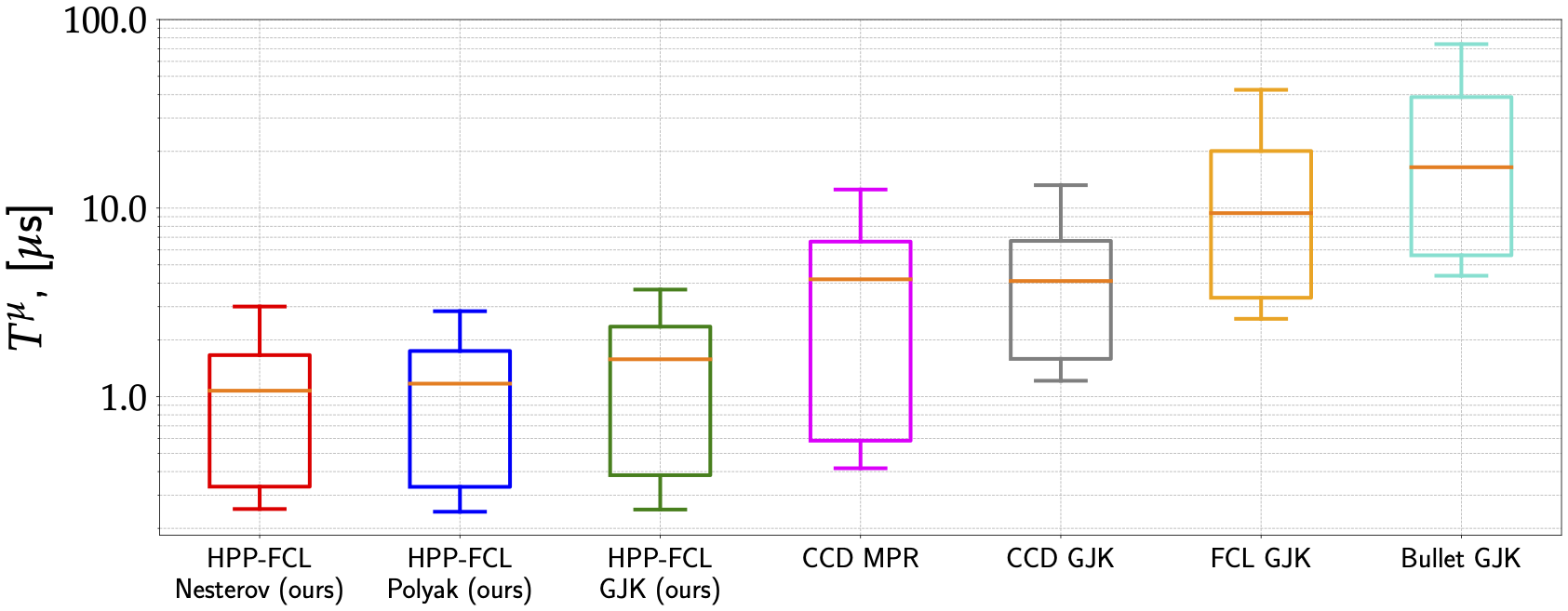
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.

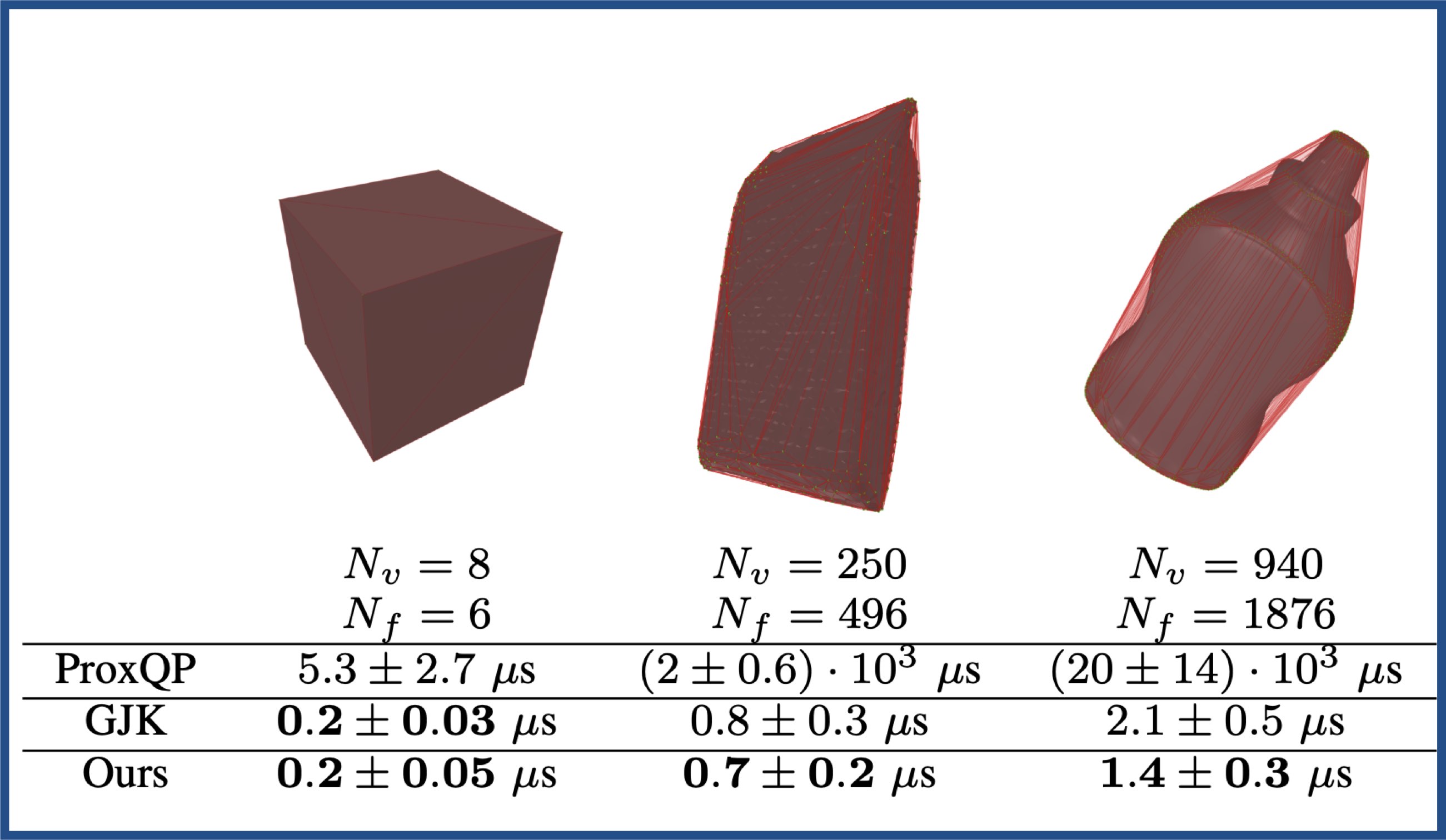
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:

One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio | |
| potential_fields_library |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/coal-library/coal.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/coal-library/coal.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |
Launch files
Messages
Services
Plugins
Recent questions tagged coal at Robotics Stack Exchange
Package Summary
| Version | 3.0.4 |
| License | BSD-3-Clause |
| Build type | CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/humanoid-path-planner/hpp-fcl.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2026-07-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Joseph Mirabel
- Justin Carpentier
- Louis Montaut
- Wolfgang Merkt
- Guilhem Saurel
Authors
Coal — An extension of the Flexible Collision Library
![]()
![]()
FCL was forked in 2015, creating a new project called HPP-FCL. Since then, a large part of the code has been rewritten or removed (unused and untested code), and new features have been introduced (see below). Due to these major changes, it was decided in 2024 to rename the HPP-FCL project to Coal.
If you use Coal in your projects and research papers, we would appreciate it if you would cite it.
New features
Compared to the original FCL library, the main new features are:
- dedicated and efficient implementations of the GJK and the EPA algorithms (we do not rely on libccd)
- the support of safety margins for collision detection
- an accelerated version of collision detection à la Nesterov, which leads to increased performance (up to a factor of 2). More details are available in this paper
- the computation of a lower bound of the distance between two objects when collision checking is performed, and no collision is found
- the implementation of Python bindings for easy code prototyping
- the support of new geometries such as height fields, capsules, ellipsoids, etc.
- enhance reliability with the fix of a myriad of bugs
- efficient computation of contact points and contact patches between objects
- full support of object serialization via Boost.Serialization
Note: the broad phase was reintroduced by Justin Carpentier in 2022, based on the FCL version 0.7.0.
This project is now used in several robotics frameworks such as Pinocchio, an open-source library which implements efficient and versatile rigid-body dynamics algorithms, the Humanoid Path Planner, an open-source library for Motion and Manipulation Planning. Coal has recently also been used to develop Simple, a new (differentiable) and efficient simulator for robotics and beyond.
A high-performance library
Unlike the original FCL library, Coal implements the well-established GJK algorithm and its variants for collision detection and distance computation. These implementations lead to state-of-the-art performance, as shown in the figures below.
On the one hand, we have benchmarked Coal against major state-of-the-art software alternatives:
- the Bullet simulator,
- the original FCL library (used in the Drake framework),
- the libccd library (used in MuJoCo).
The results are depicted in the following figure, which notably shows that the accelerated variants of GJK largely outperform by a large margin (from 5x up to 15x times faster). Please notice that the y-axis is in log scale.
On the other hand, why do we care about dedicated collision detection solvers like GJK for the narrow phase? Why can’t we simply formulate the collision detection problem as a quadratic problem and call an off-the-shelf optimization solver like ProxQP)? Here is why:
One can observe that GJK-based approaches largely outperform solutions based on classic optimization solvers (e.g., QP solver like ProxQP), notably for large geometries composed of tens or hundreds of vertices.
Open-source projects relying on Coal
- Pinocchio A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives.
- IfcOpenShell Open source IFC library and geometry engine.
- Crocoddyl A software to realize model predictive control for complex robotics platforms.
- TSID A software that implements a Task Space Inverse Dynamics QP.
- HPP A SDK that implements motion planners for humanoids and other robots.
- Jiminy A simulator based on Pinocchio.
- ocs2 A toolbox for Optimal Control for Switched Systems (OCS2)
Installation
Conda
Coal can be installed from the conda-forge channel:
conda install coal -c conda-forge
Docker
docker run --rm -it ghcr.io/coal-library/coal:devel
Build
You can find build instruction here.
C++ example
Both the C++ library and the python bindings can be installed as simply as conda -c conda-forge install coal.
The .so library, include files and python bindings will then be installed under $CONDA_PREFIX/lib, $CONDA_PREFIX/include and $CONDA_PREFIX/lib/python3.XX/site-packages.
Here is an example of using Coal in C++:
```cpp #include “coal/math/transform.h” #include “coal/mesh_loader/loader.h” #include “coal/BVH/BVH_model.h”
File truncated at 100 lines see the full file
Changelog
All notable changes to this project will be documented in this file.
The format is based on Keep a Changelog.
[Unreleased]
Added
- broadphase: add functional API for collision and distance callbacks (#724)
- Added a second set of Python bindings based on nanobind (#659)
- ROS: jrl_cmakemodules dependency + kilted CI (#769)
- Added
SUFFIX_SO_VERSIONCMake option, defaultOFF(#770) - Add pixi-build support (#774)
- contact patches: add helpers to reduce the size of a contact patch by keeping points that minimize the difference between the area of the original patch and the area of the new patch
- timings: + and += operators (805)
- Add print methods for collision data (
Contact,CollisionRequest,CollisionResult,DistanceRequest,DistanceResult,ContactPatch,ContactPatchRequestandContactPatchResult) (854).- One can now do
std::cout << contactfor example. - Added the
PrintableVisitorin python bindings so thatprint(contact)works in python as well
- One can now do
- Added
resolveReferencesmethod toContactandDistanceResultto remap theo1/o2pointers (typically after serialization/deserialization) (855). - Added copy constructors to
Contact::Contact(const Contact& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)andDistanceResult::DistanceResult(const DistanceResult& other, const CollisionGeometry* new_o1, const CollisionGeometry* new_o2)to allow copying aContactorDistanceResultwhile remapping theo1/o2pointers to new geometries. This is typically useful in the context of deep-copying (#856). - Added the
COAL_EQUAL_OPERATOR_CHECKmacro. This macro can be overridden at compile time, extremely practial for debugging serialization for example. (#859)
Removed
- Remove direct dependency to (#744):
- Boost::system
- Boost::chrono
- Boost::date_time
- Boost::thread
Fixed
- Fix doc parsing via doxygen scripts (#678 #699)
- Correctly calculate AABB for pruned octrees (#741)
- Fix contact counting in octree collision detection with ShapeShapeCollide (#746)
- Fix sqrDistLowerBound in octree traversal with height field (#753)
- Fix contact patch computation by enforcing CCW construction of support sets (#772)
- Remove pixi 0.57 warnings (#774)
- Fix nanobind bindings’ stub file (#781)
- Remove Windows warnings when building benchmakrs (789)
- convex: a point can have more than 256 neighbors now. In fact, a point can have
std::numeric_limits<IndexType>::max()number of neighbors, where IndexType is typically int16 or int32 (805) - Fix octree against octree collision check (#811)
- Fix condition for negative bounding volume check (#816)
- Add missing calls to computeLocalAABB for internal objects (#819)
- Add missing override specifiers (#820)
- Fix Python error when accessing
geometry.convexon BVH geometris (#833) - Fix
Contact,CollisionResultandDistanceResultoperator== (#856):- If the
o1/o2pointers are different, we check whether or not the underlying geometries are the same. This is typically important in the context of serialization. - Fix using NaN to initialize collision data (
Contact,CollisionResult,DistanceResult). This prevents the absurdContact contact; contact == contact; // falseproblem. - Fix NaNs coming from GJK/EPA when the algorithms (correctly) early stopped. NaNs indicate failure. In the case that GJK/EPA early stopped but ran fine, we set non-computed data to inf instead of NaN.
- If the
Changed
- Float precision (#665)
- Rename
CoalScalartoScalar - Add option to switch between (default) double precision and float precision
- Changed all the uses of
doubletoScalarin Coal - Fixed all the compilation warnings when compiling the library using float precision
- Rename
- Tracy profiling (#668)
- added cmake option
COAL_BUILD_WITH_TRACY - put tracy scoped zones in broadphase and primitive shapes collision/distance queries
- added cmake option
- Use double precision for GJK/EPA when coal is compiled in float (#674)
- Everything is in float in coal (including the support functions), except the computations inside GJK/EPA
- Allows GJK/EPA to avoid limitation of float precision
- Renamed PyPI package from coal-library to coal (#675)
- Fixed malloc in COAL_ASSERT (#687)
- Introducing
Convex16andConvex32to store neighbors and polygons indices asuint16oruint32(#682, #716).- Along with #665, this allows to divide by two the memory footprint of
Convex.
- Along with #665, this allows to divide by two the memory footprint of
- Fixed a bug in DynamicAABBTree broadphase that missed aabb overlaps when multiple planes/halfspaces are used in a scene.
- Python version update (#774):
- Project is now tested with Python 3.10 and 3.14
- Python 3.10 is the minimal supported Python version
- Nix: switch to flakoboros (#852)
- Allow to use Python variant in pixi build (#872)
[3.0.4] - 2026-06-29
-
coalConfig.cmakedeclare the right Boost component to search (#869)
[3.0.3] - 2026-05-05
- Backport removal of Boost::system
[3.0.2] - 2025-09-29
Added
- CMake: add COAL_DISABLE_HPP_FCL_WARNINGS option (#709)
- CMake: add support for BUILD_STANDALONE_PYTHON_INTERFACE (#658)
- Docker images
ghcr.io/coal-library/coal(#737)
Removed
- Remove constraints on supported doxygen version to generate the python documentation (#681)
- Remove useless COAL_WITH_CXX11_SUPPORT guard (#688)
- Remove qhull submodule, as ubuntu 20.04 is EoL (#704)
- Removed support for octomap < 1.8 (#727)
Changed
- Formatted all CMake listfiles using gersemi, add gersemi to pre-commit configuration (#657)
[3.0.1] - 2025-02-12
File truncated at 100 lines see the full file
Dependant Packages
| Name | Deps |
|---|---|
| pinocchio |