
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
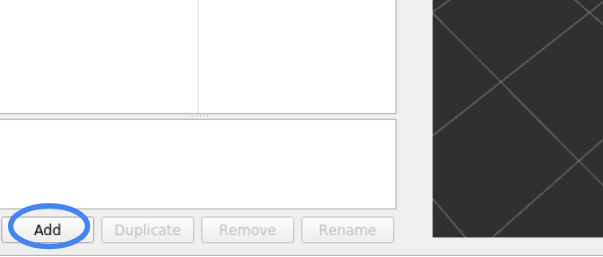
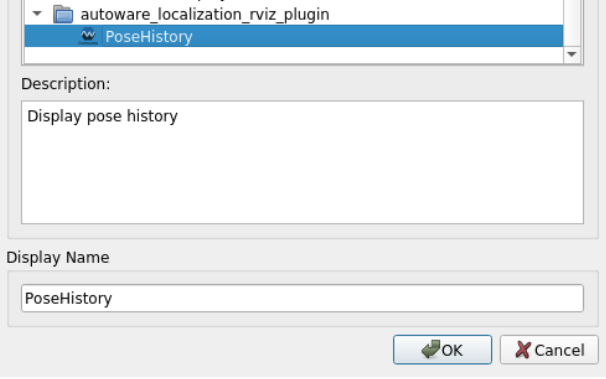
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
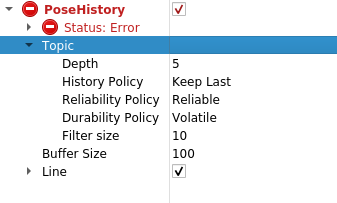
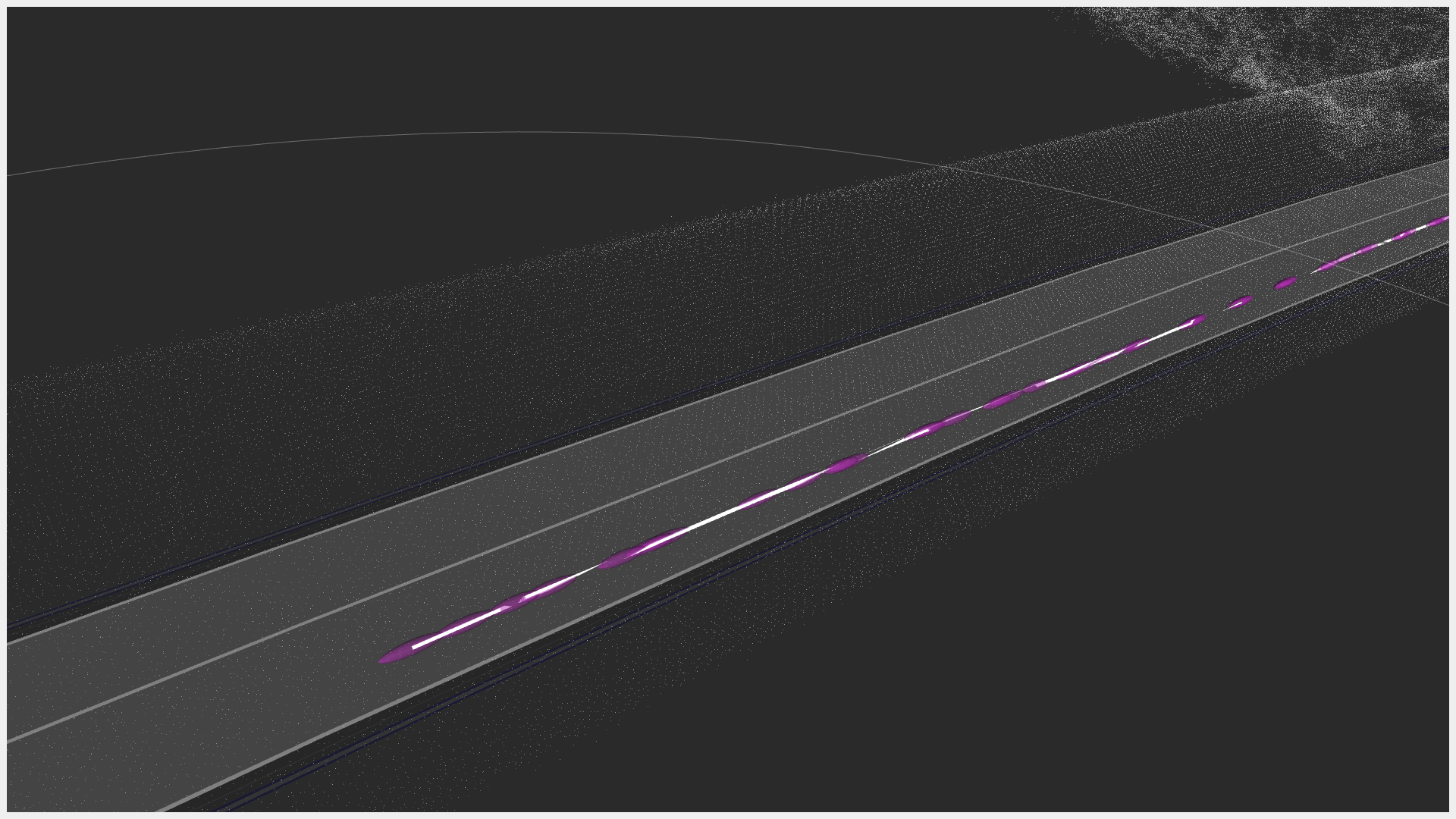
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged autoware_localization_rviz_plugin at Robotics Stack Exchange
|
|
autoware_localization_rviz_plugin package from autoware_rviz_plugins repoautoware_localization_rviz_plugin autoware_mission_details_overlay_rviz_plugin autoware_overlay_rviz_plugin autoware_string_stamped_rviz_plugin autoware_perception_rviz_plugin autoware_planning_rviz_plugin |
ROS Distro
|
Package Summary
| Version | 0.4.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/autowarefoundation/autoware_rviz_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-02-14 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takagi, Isamu
- Takamasa Horibe
- Yamato Ando
Authors
- Takagi, Isamu
- Takamasa Horibe
- Yuhei Oshikubo
- Kazusa Hashimoto
autoware_localization_rviz_plugin
Purpose
This plugin can display the localization history obtained by ekf_localizer, ndt_scan_matching, and GNSS. If the uncertainty of the estimated pose is given, it can also be displayed.
Inputs / Outputs
Input
Pose History
| Name | Type | Description |
|---|---|---|
input/pose |
geometry_msgs::msg::PoseStamped |
In input/pose, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Pose With Covariance History
| Name | Type | Description |
|---|---|---|
input/pose_with_covariance |
geometry_msgs::msg::PoseWithCovarianceStamped |
In input/pose_with_covariance, put the result of localization calculated by ekf_localizer, ndt_scan_matching, or GNSS |
Parameters
Core Parameters
Pose History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_line_view_ |
bool | true | Use Line property or not |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
Pose With Covariance History
| Name | Type | Default Value | Description |
|---|---|---|---|
property_buffer_size_ |
int | 100 | Buffer size of topic |
property_path_view_ |
bool | true | Use path property or not |
property_shape_type_ |
string | Line | Line or Arrow |
property_line_width_ |
float | 0.1 | Width of Line property [m] |
property_line_alpha_ |
float | 1.0 | Alpha of Line property |
property_line_color_ |
QColor | Qt::white | Color of Line property |
property_arrow_shaft_length |
float | 0.3 | Shaft length of Arrow property |
property_arrow_shaft_diameter |
float | 0.15 | Shaft diameter of Arrow property |
property_arrow_head_length |
float | 0.2 | Head length of Arrow property |
property_arrow_head_diameter |
float | 0.3 | Head diameter of Arrow property |
property_arrow_alpha_ |
float | 1.0 | Alpha of Arrow property |
property_arrow_color_ |
QColor | Qt::white | Color of Arrow property |
property_sphere_scale_ |
float | 1.0 | Scale of Sphere property |
property_sphere_alpha_ |
float | 0.5 | Alpha of Sphere property |
property_sphere_color_ |
QColor | (204, 51, 204) | Color of Sphere property |
Assumptions / Known limits
TBD.
Usage
- Start rviz and select Add under the Displays panel.
- Select autoware_localization_rviz_plugin/PoseHistory or PoseWithCovarianceHistory. Next, press OK.
- Enter the name of the topic where you want to view the trajectory and the covariance.
- You can view the trajectory and the covariance.
Changelog for package autoware_localization_rviz_plugin
0.4.0 (2026-02-14)
0.3.0 (2025-11-16)
0.2.0 (2025-08-14)
0.1.0 (2025-06-28)
-
feat: port tier4_localization_rviz_plugin from Autoware Universe (#5)
- feat: port localization_rviz_plugin from Autoware Universe
- rename package to autoware_localization_rviz_plugin
- style(pre-commit): autofix
* remove CHANGELOG.rst ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_internal_debug_msgs | |
| autoware_vehicle_info_utils | |
| geometry_msgs | |
| rclcpp | |
| rviz_common | |
| rviz_default_plugins | |
| tf2_ros |