
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.

Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI |  |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
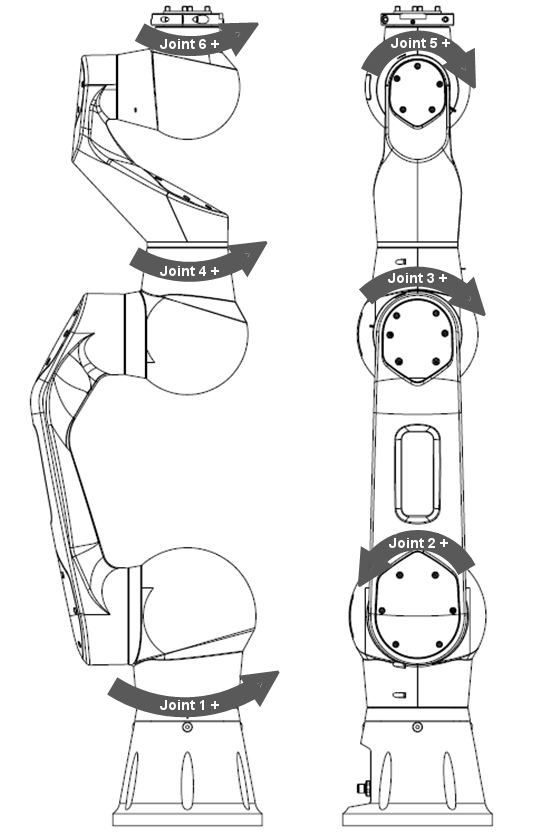
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt pilz_utils prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.4.12 |
| pilz_robots | 0.4.12 |
| pilz_status_indicator_rqt | 0.4.12 |
| pilz_utils | 0.4.12 |
| prbt_gazebo | 0.4.12 |
| prbt_hardware_support | 0.4.12 |
| prbt_ikfast_manipulator_plugin | 0.4.12 |
| prbt_moveit_config | 0.4.12 |
| prbt_support | 0.4.12 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.
Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-kinetic-pilz-robots
or
sudo apt install ros-melodic-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
``` auto can0 iface can0 can static
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | melodic-devel |
| Last Updated | 2023-11-22 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.5.23 |
| pilz_robots | 0.5.23 |
| pilz_status_indicator_rqt | 0.5.23 |
| prbt_gazebo | 0.5.23 |
| prbt_hardware_support | 0.5.23 |
| prbt_ikfast_manipulator_plugin | 0.5.23 |
| prbt_moveit_config | 0.5.23 |
| prbt_support | 0.5.23 |
README
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.

Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-$ROS_DISTRO-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | coming soon | ||
| Buildfarm bin | coming soon |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Supported hardware versions
PRBT firmware version 1.1.0
If you want to update your PRBT firmware please contact our repair center.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
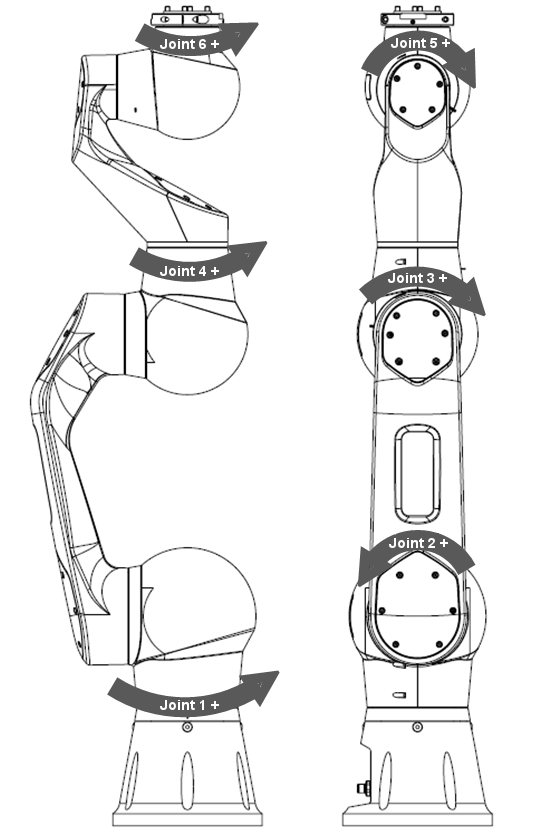
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal. Only relevant forsim:=Falseto issue a Safe stop 1. See prbt_hardware_support package.
Running the simulation
- Run
roslaunch prbt_moveit_config moveit_planning_execution.launch sim:=true pipeline:=ompl - Use the moveit Motion Planning rviz plugin to plan and execute (see e.g. ROS-I training exercise 3.4)
Running on the real robot
- Activate can interface:
sudo ip link set can0 up type can bitrate 1000000(after every reboot or reconnect of the CAN hardware). For persistent configuration append the following to the file/etc/network/interfaces
File truncated at 100 lines see the full file
CONTRIBUTING
|
|
pilz_robots repositorypilz_control pilz_robots pilz_status_indicator_rqt prbt_gazebo prbt_hardware_support prbt_ikfast_manipulator_plugin prbt_moveit_config prbt_support |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/PilzDE/pilz_robots.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2026-07-07 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pilz_control | 0.6.0 |
| pilz_robots | 0.6.0 |
| pilz_status_indicator_rqt | 0.6.0 |
| prbt_gazebo | 0.6.0 |
| prbt_hardware_support | 0.6.0 |
| prbt_ikfast_manipulator_plugin | 0.6.0 |
| prbt_moveit_config | 0.6.0 |
| prbt_support | 0.6.0 |
README
⚠️ End of Life (EOL) Notice
ROS 1 has reached End of Life (EOL). This repository is no longer maintained.
What this means
- ❌ No new features will be developed.
- ❌ No bug fixes will be provided.
- ❌ No security updates will be released.
- ⚠️ Use at your own risk.
![]()
PILZ robot manipulator module PRBT 6 in ROS
Package: pilz_robots
The meta package for the PILZ manipulator PRBT 6. Here you can find documentation of the individual packages. For a general overview and link collection we refer to the wiki page.

Installation
To use the packages, you can install prebuilt packages with
sudo apt install ros-$ROS_DISTRO-pilz-robots
Build Status
| Kinetic | Melodic | Noetic | |
|---|---|---|---|
| Travis/Github CI | |
||
| Buildfarm src | |||
| Buildfarm bin |
Branching model
noetic-devel is considered to be the active development branch.
Relevant changes are cherry-picked into melodic-devel or kinetic-devel on a case-by-case basis.
Supported hardware versions
PRBT firmware version 1.1.0
If you want to update your PRBT firmware please contact our repair center.
Package: prbt_support
The package contains the robot description of the PRBT manipulator.
-
urdf/contains the xacros for generating the urdf descriptions of the PILZ robot PRBT. -
meshes/contains the stl files for visualization -
test/contains test files for urdf- build tests:
catkin_make tests - build and run tests:
catkin_make run_tests
- build tests:
-
config/defines the controllers and drivers. Loads the specializedPilzTrajectoryController.
Pilz Coordinate Frames
To see the robot in rviz you can use
roslaunch prbt_support test_urdf.launch
The joint directions are illustrated in the following image:
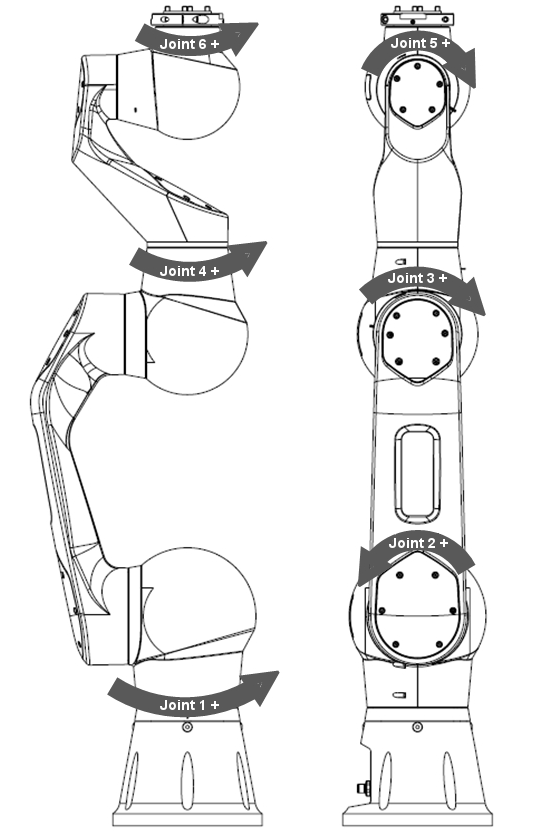
Configure the tcp
You can easily adjust the tool center point frame with an offset and rotation in the xacro file.
- Open prbt_support/urdf/prbt.xacro
- Edit the lines to your desired offset
<xacro:unless value="$(arg gripper)">
<xacro:arg name="tcp_offset_xyz" default="0 0 0"/>
<xacro:arg name="tcp_offset_rpy" default="0 0 0"/>
</xacro:unless>
Note: You can set a different default if you have a gripper attached.
Package: prbt_moveit_config
The package is generated by moveit setup assistant. It contains configuration files and launch files needed to start up the robot including planning and execution.
Configuring the robot
Use the launch file moveit_planning_execution.launch to bring up the robot controllers
with the complete moveit pipeline.
The launch file allows to set optional parameters
-
sim(default: True)
true: Use fake execution and display emulated robot position in RViz
false: connect to real robot usingros_canopen -
pipeline(default: ompl)
Planning pipeline to use with moveit -
load_robot_description(default: True)
Load robot description to parameter server. Can be set to false to let someone else load the model -
rviz_config(default: prbt_moveit_config/launch/moveit.rviz)
Start RViz with default configuration settings. Once you have changed the configuration and have saved it inside your package folder, set the path and file name here. -
gripper(default: None)
See Running the prbt with a gripper -
safety_hw(default: pss4000)
Connect to the safety controller that handles the safe-torque-off signal.
File truncated at 100 lines see the full file