
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
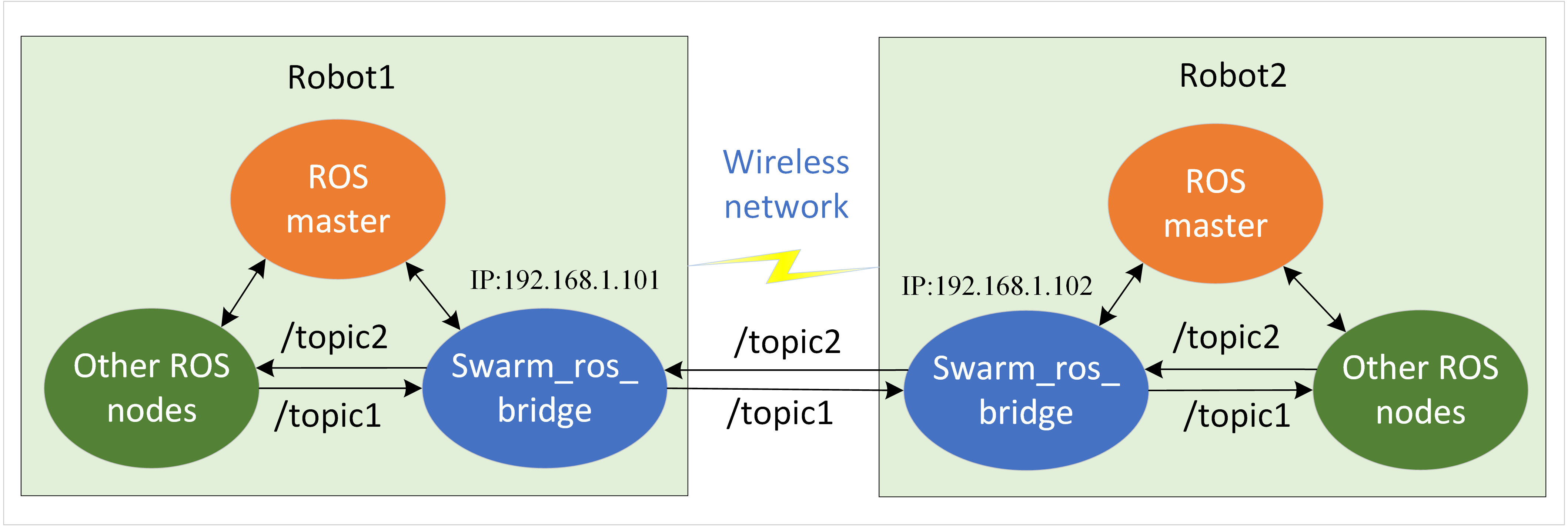
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |
Dependant Packages
Messages
Services
Plugins
Recent questions tagged swarm_ros_bridge at Robotics Stack Exchange
|
|
swarm_ros_bridge package from swarm_ros_bridge reposwarm_ros_bridge |
ROS Distro
|
Package Summary
| Version | 1.0.0 |
| License | BSD-3-Clause |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/shupx/swarm_ros_bridge.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-03-20 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- shupeixuan
Authors
swarm_ros_bridge
:heavy_exclamation_mark: (Updated on 2026.3.20) The author strongly recommend you to move to the zenoh ROS bridge, which has automatic ROS topic discovery mechanism and better port management. ROS1 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros1 ROS2 zenoh bridge: https://github.com/eclipse-zenoh/zenoh-plugin-ros2dds But the topic remapping and throttling is better in swarm_ros_bridge.
Introduction
A lightweight middle interface ROS package mainly based on ZeroMQ. It enables the specified ROS messages transmission among swarm robots through socket communication. The purpose of this package is to replace the traditional way of running ROS across multiple machines in ROS1, which has some drawbacks under swarm robots situation.
An example of two ROS robots communicating with each other through swarm_ros_bridge is shown below:
Compared with ROS1 multi-robot wireless communication, it has the following benefits:
-
Robust: No need for base station ROS master launching first. Support each robot launching in a random sequence and connecting each other autonomously.
-
Flexible: You can choose the sending/receiving ROS topics rather than transferring all topic (names) as ROS1 does.
-
Easy to use: Specify all the IP and ROS topics in one configuration file.
Compared with ROS2 DDS communication, it may have the following benefits:
- Lightweight: It is a small ROS bridge node subscribing and sending remote ROS topics, so connecting with other ROS nodes is easy.
- Reliable: It uses ZeroMQ socket communication based on TCP protocol while ROS2 is based on DDS, whose default protocol is UDP (unreliable). DDS is mainly designed for data exchange between native processes under wired communication rather than remote wireless communication.
ROS wiki page: https://wiki.ros.org/swarm_ros_bridge
source code: https://github.com/shupx/swarm_ros_bridge.git
csdn blog (in chinese): https://blog.csdn.net/benchuspx/article/details/128576723
Structure
└── swarm_ros_bridge
├── CMakeLists.txt
├── config
│ └── ros_topics.yaml # Config file to specify send/receive ROS topics
├── include
│ ├── bridge_node.hpp # Header file of bridge_node.cpp
│ ├── ros_sub_pub.hpp # Header file for different ROS message type.
├── launch
│ └── test.launch
├── package.xml
└── src
└── bridge_node.cpp # @brief Reliable TCP bridge for ros data transfer in unstable network.
# It will send/receive the specified ROS topics in ../config/ros_topics.yaml
# It uses zmq socket(PUB/SUB mode), which reconnects others autonomously and
# supports 1-N pub-sub connection even with TCP protocol.
Install
Supported platforms/releases:
| Platform | ROS Release |
|---|---|
| Ubuntu 16.04 Xenial | ROS Kinetic |
| Ubuntu 18.04 Bionic | ROS Melodic |
| Ubuntu 20.04 Focal | ROS Noetic |
Install process:
## clone this package
mkdir -p swarm_ros_bridge_ws/src # or your own ros workspace
cd swarm_ros_bridge_ws/src
git clone https://gitee.com/shu-peixuan/swarm_ros_bridge.git
# or 'git clone https://github.com/shupx/swarm_ros_bridge.git'
## install dependencies
sudo apt install libzmqpp-dev
# or 'rosdep install --from-path swarm_ros_bridge/'
## build
cd ../
catkin_make
source devel/setup.bash
Usage
- Specify the IP and ROS topic information in
config/ros_topics.yaml.
- For the sending topic, IP is self IP (* for example) and port should be different as it binds to the “tcp://*:port”.
-
For the receiving topic, IP and port should be the remote source IP and port as it connects to the “tcp://srcIP:srcPort”.
- The
max_freqwill limit the sending frequency once it exceedsmax_freq. Setmax_freqlarge enough if you do not want to decrease the sending frequency.
- Launch the bridge_node:
roslaunch swarm_ros_bridge test.launch # local machine test
- Publish messages into send_topics and check that remote recv_topics are receiving these messages. The console will also print INFO the first time recv_topics receive messages.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| std_msgs | |
| geometry_msgs | |
| sensor_msgs | |
| catkin |
System Dependencies
| Name |
|---|
| libzmqpp-dev |