
|
ros_ign_gazebo_demos package from ros_ign reporos_ign ros_ign_bridge ros_ign_gazebo ros_ign_gazebo_demos ros_ign_image ros_ign_point_cloud |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.111.2 |
| License | Apache 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ignitionrobotics/ros_ign.git |
| VCS Type | git |
| VCS Version | noetic |
| Last Updated | 2023-03-08 |
| Dev Status | DEVELOPED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Louise Poubel
Authors
ROS + Ignition Gazebo demos
This package contains demos showing how to use Ignition Gazebo with ROS.
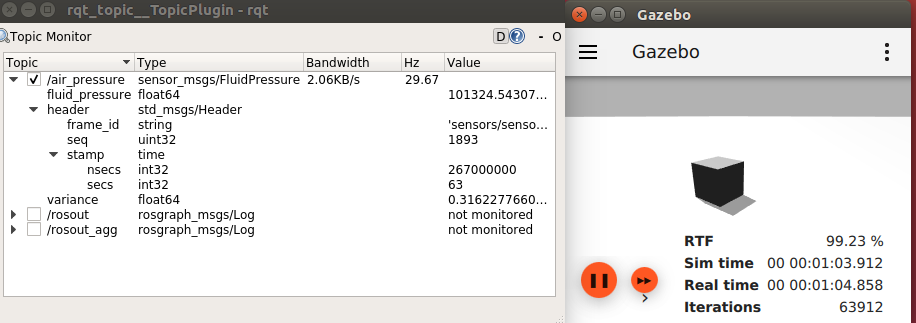
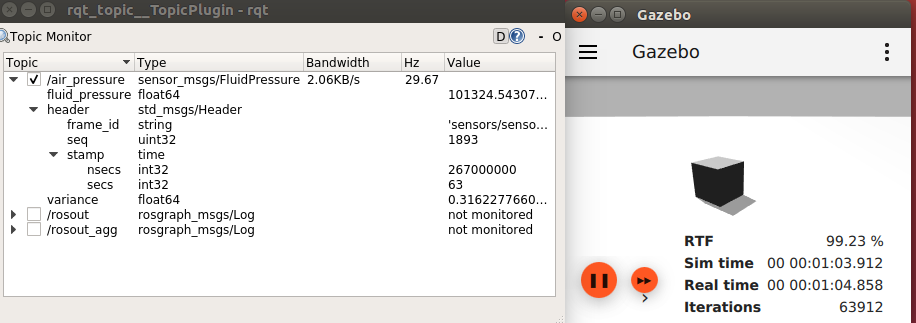
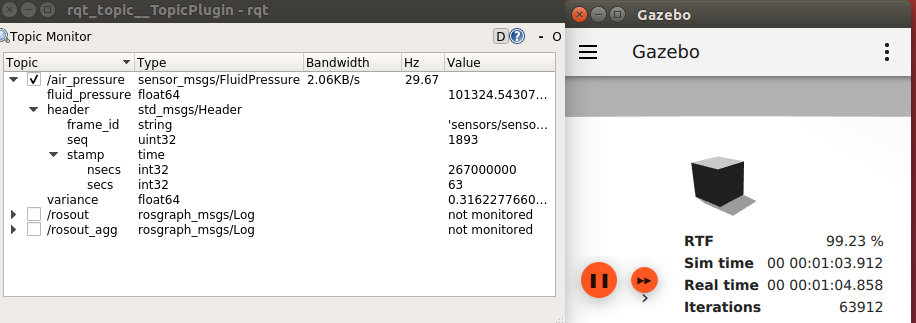
Air pressure
Publishes fluid pressure readings.
roslaunch ros_ign_gazebo_demos air_pressure.launch
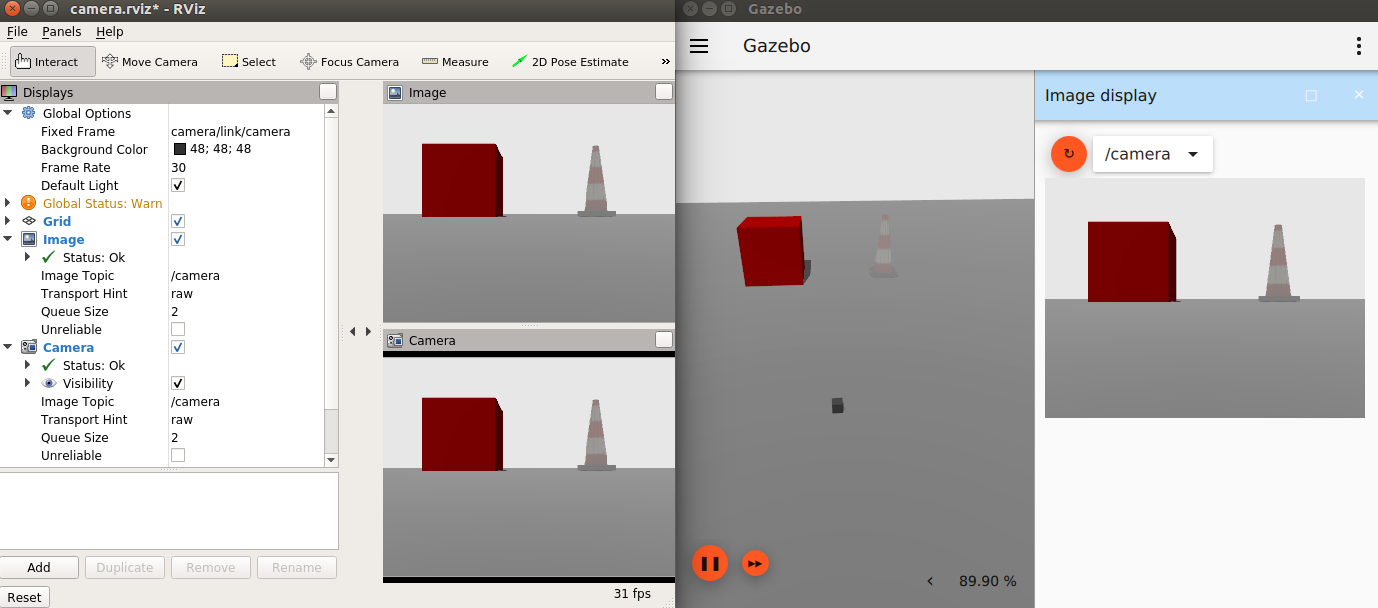
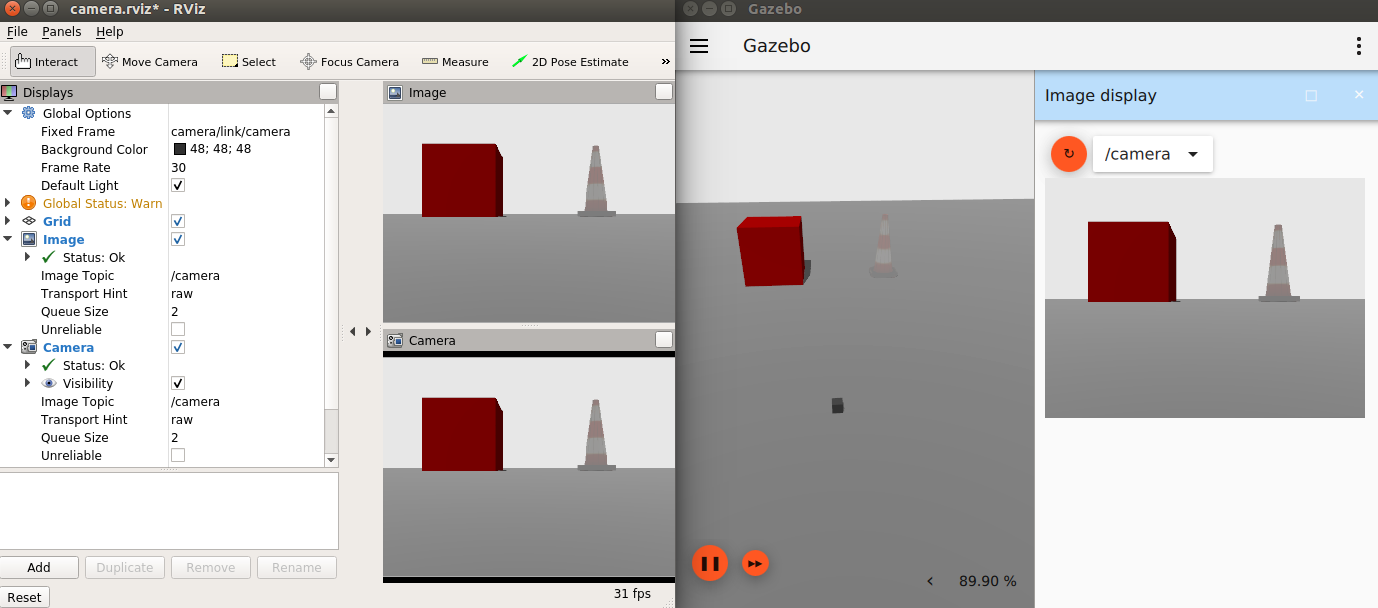
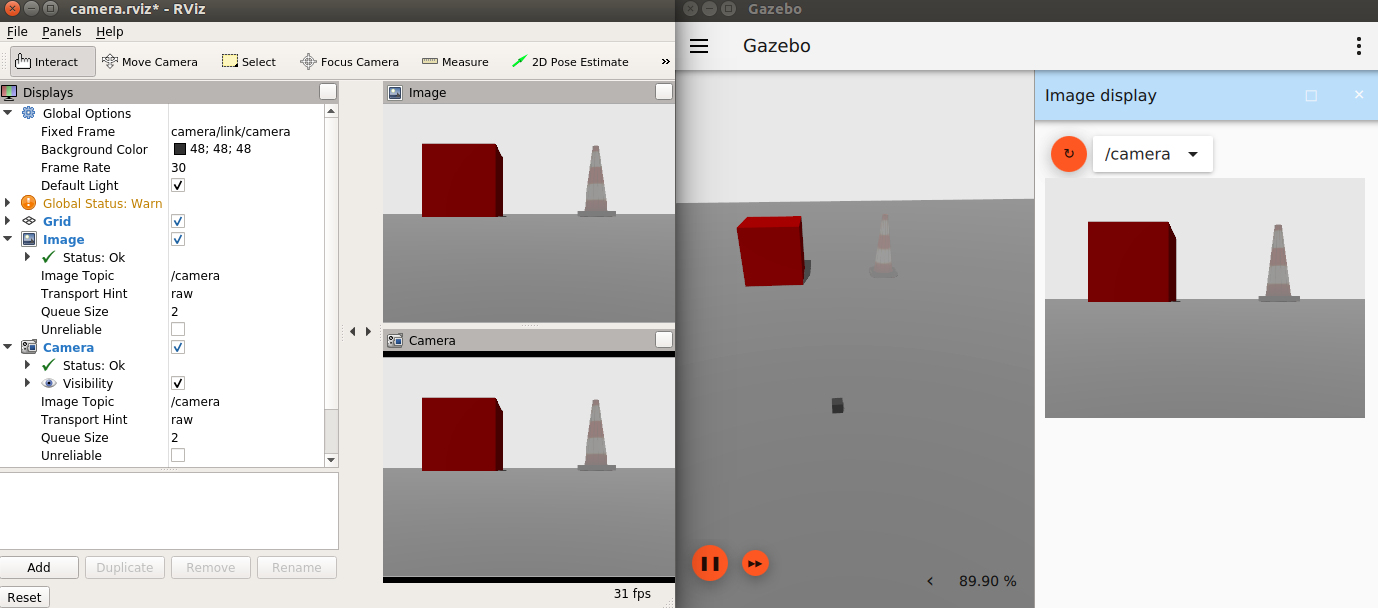
Camera
Publishes RGB camera image and info.
Images can be exposed to ROS through ros_ign_bridge or ros_ign_image.
Using the image bridge (unidirectional, uses image_transport):
roslaunch ros_ign_gazebo_demos image_bridge.launch
Using the regular bridge:
roslaunch ros_ign_gazebo_demos camera.launch
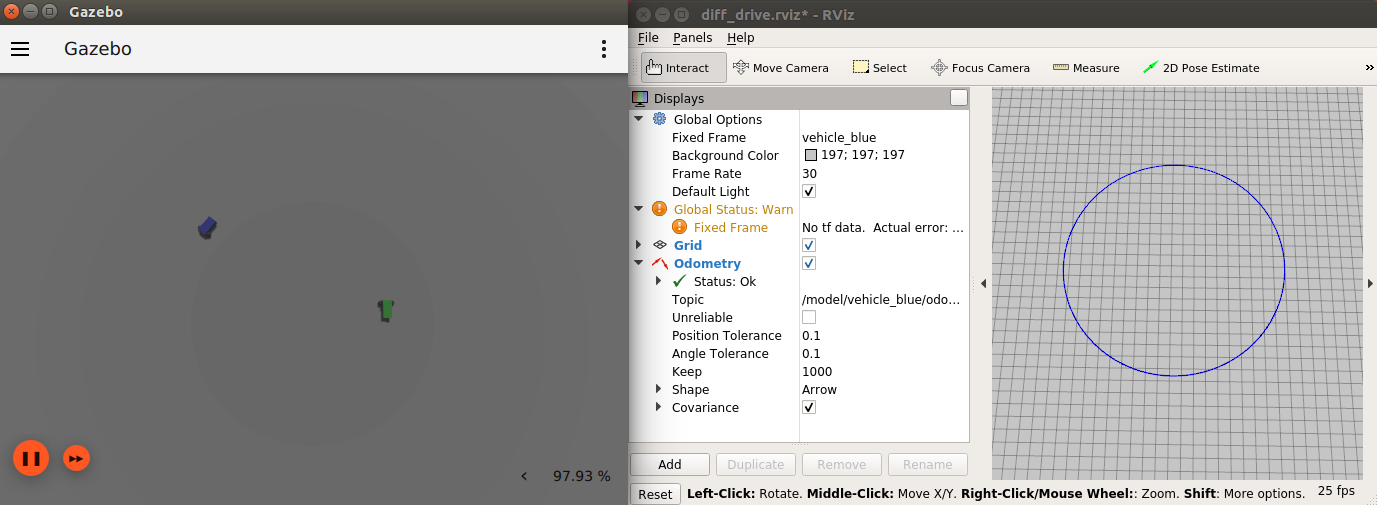
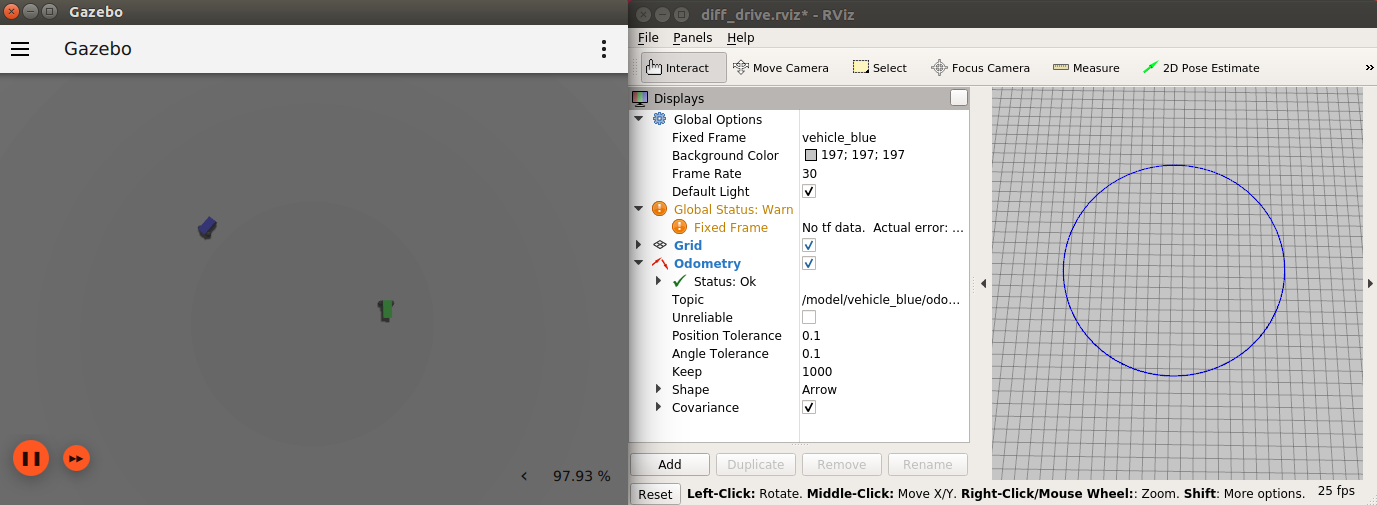
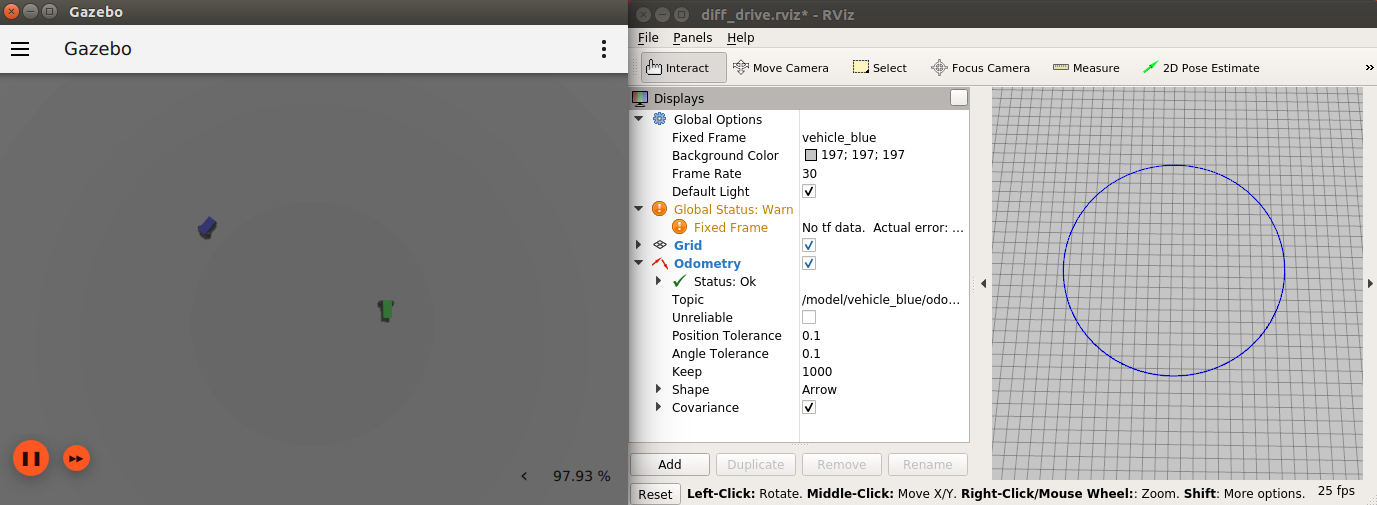
Diff drive
Send commands to a differential drive vehicle and listen to its odometry.
roslaunch ros_ign_gazebo_demos diff_drive.launch
Then send a command
rostopic pub /model/vehicle_blue/cmd_vel geometry_msgs/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"
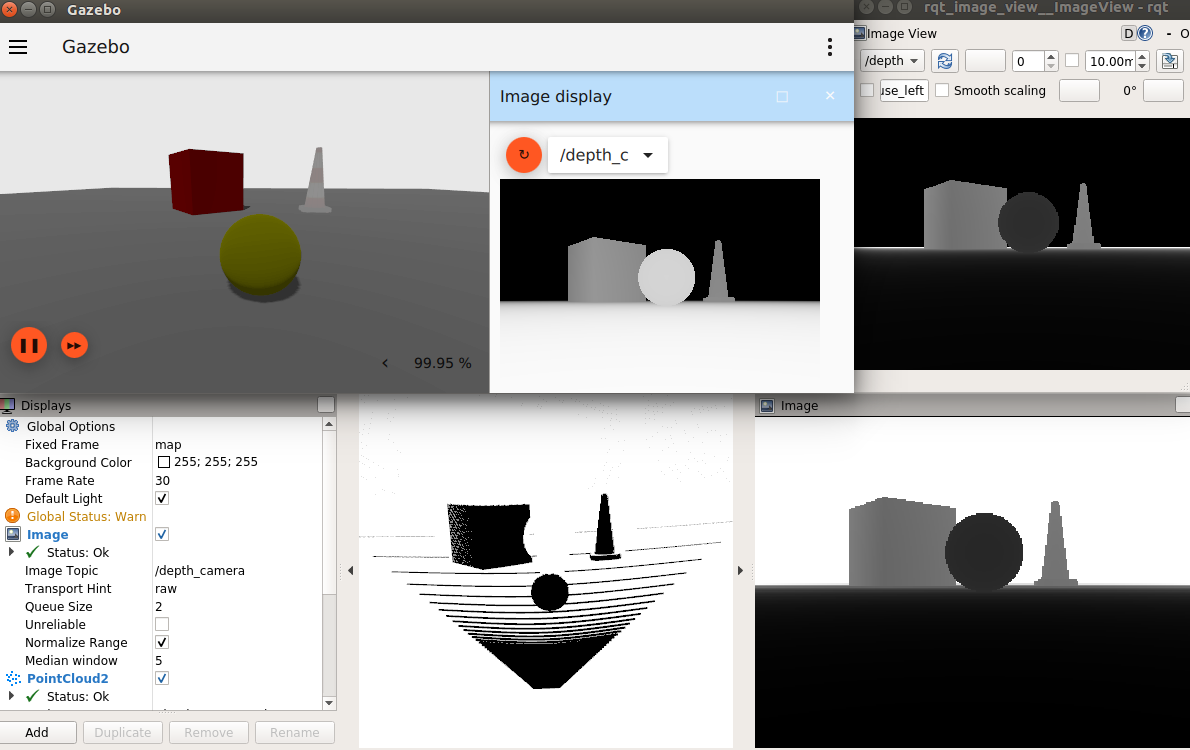
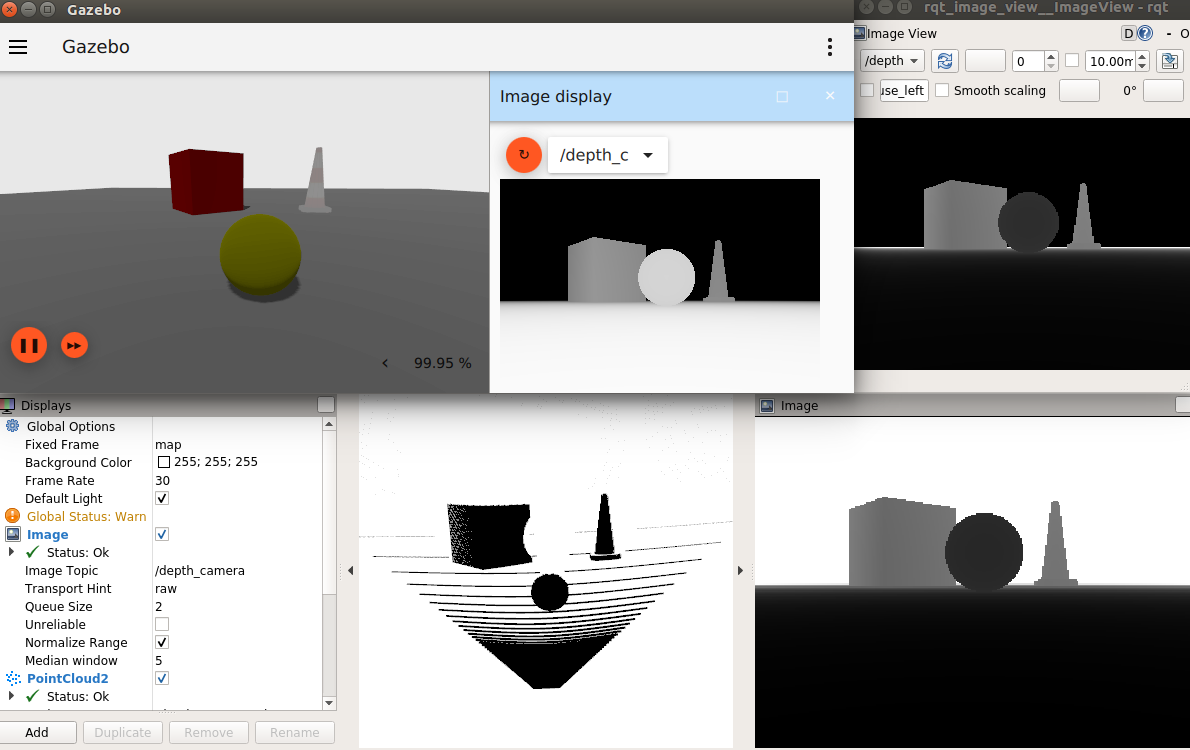
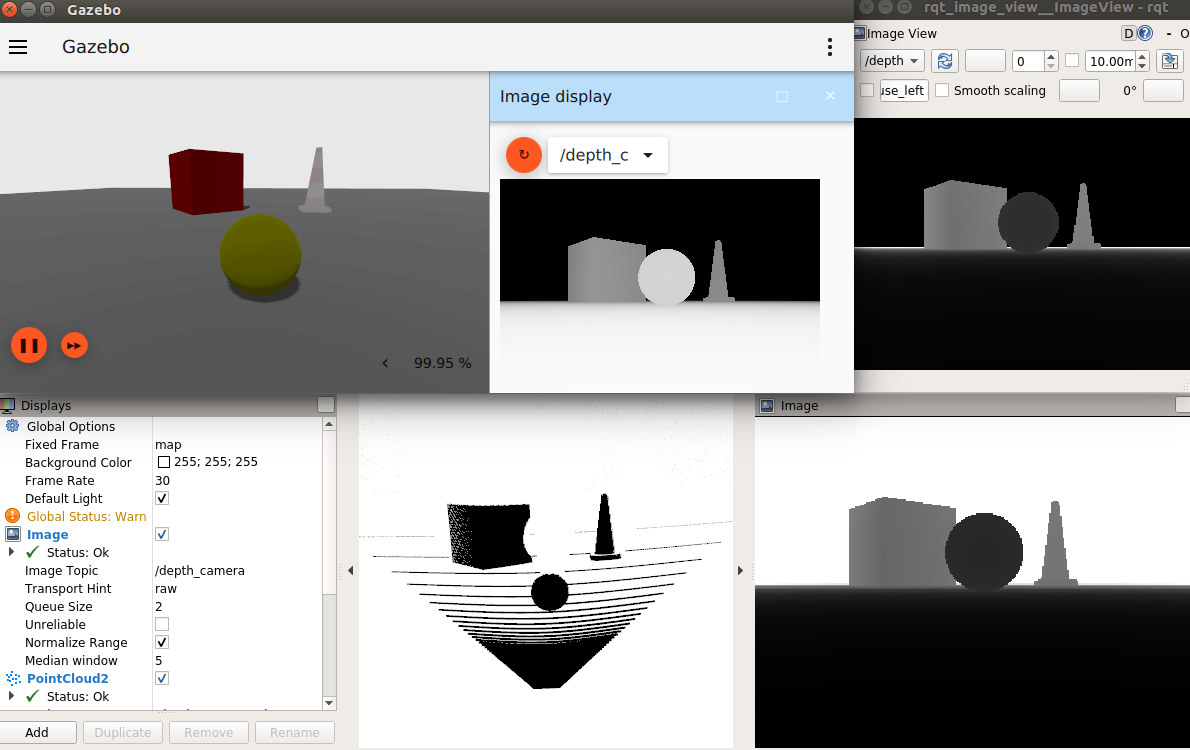
Depth camera
Depth camera data can be obtained as:
-
sensor_msgs/Image, throughros_ign_bridgeorros_ign_image -
sensor_msgs/PointCloud2, throughros_ign_bridgeorros_ign_point_cloud(See issue #40)
Using the image bridge (unidirectional, uses image_transport):
roslaunch ros_ign_gazebo_demos image_bridge.launch
Using the bridge:
roslaunch ros_ign_gazebo_demos depth_camera_bridge.launch
Using Ignition Gazebo plugin:
roslaunch ros_ign_gazebo_demos depth_camera.launch
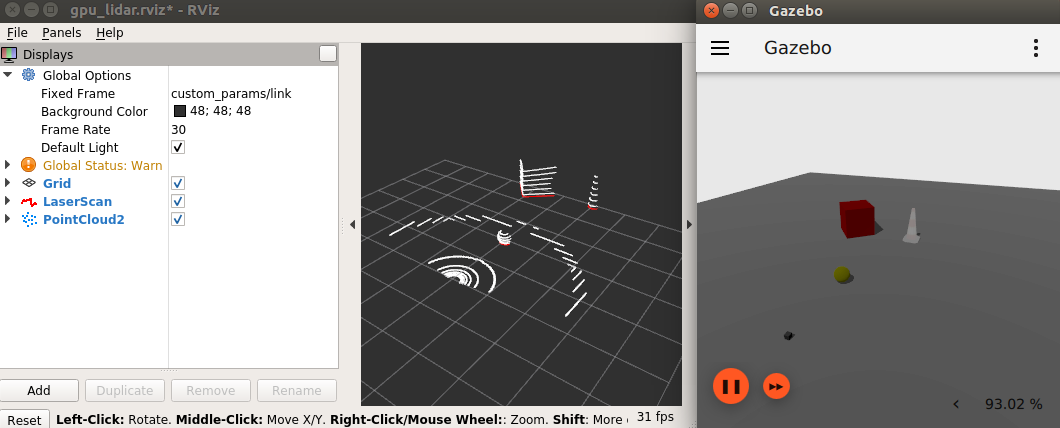
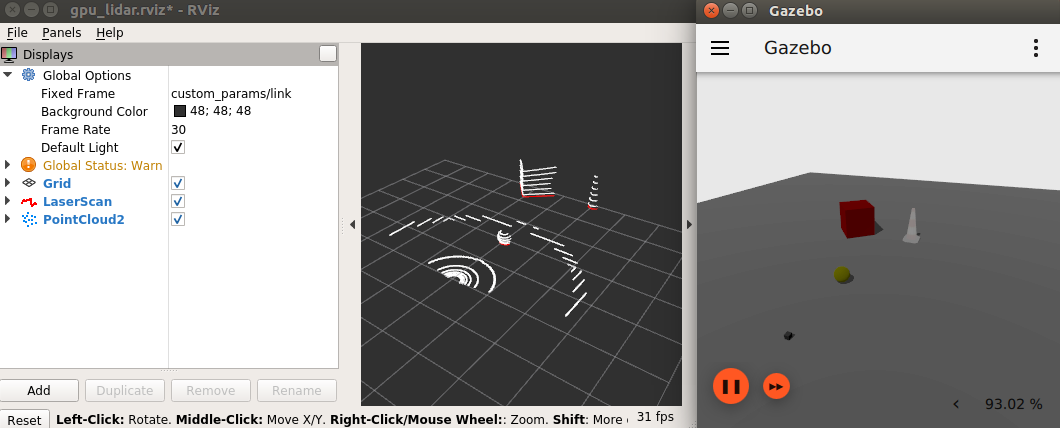
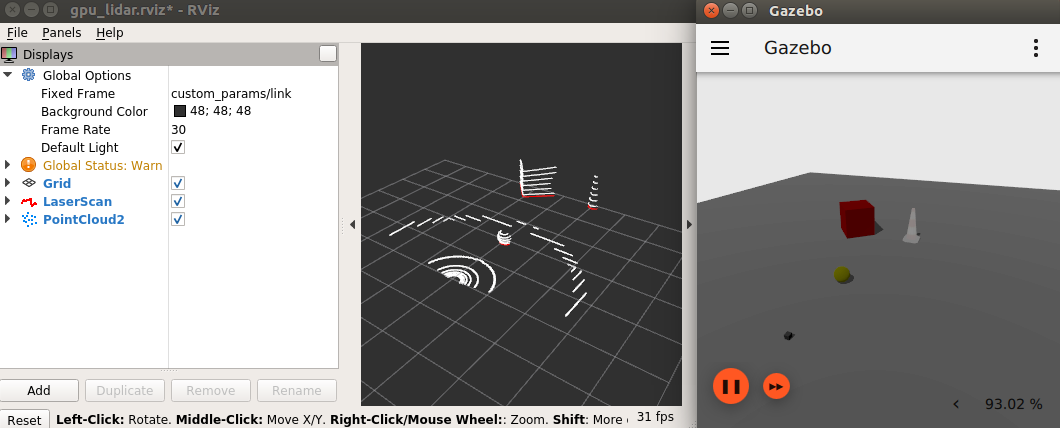
GPU lidar
GPU lidar data can be obtained as:
-
sensor_msgs/LaserScan, throughros_ign_bridge -
sensor_msgs/PointCloud2, throughros_ign_bridgeorros_ign_point_cloud(See issue #40)
Using the bridge:
roslaunch ros_ign_gazebo_demos gpu_lidar_bridge.launch
Using Ignition Gazebo plugin:
roslaunch ros_ign_gazebo_demos gpu_lidar.launch
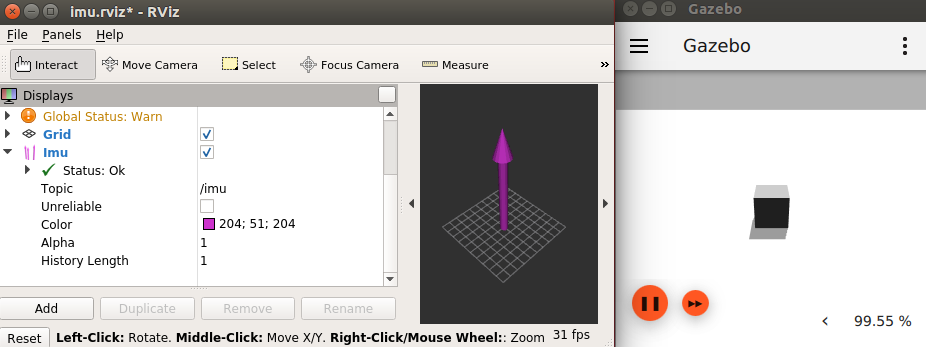
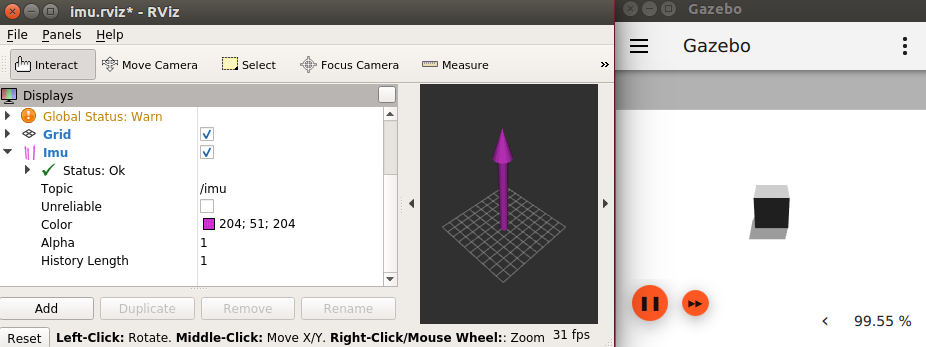
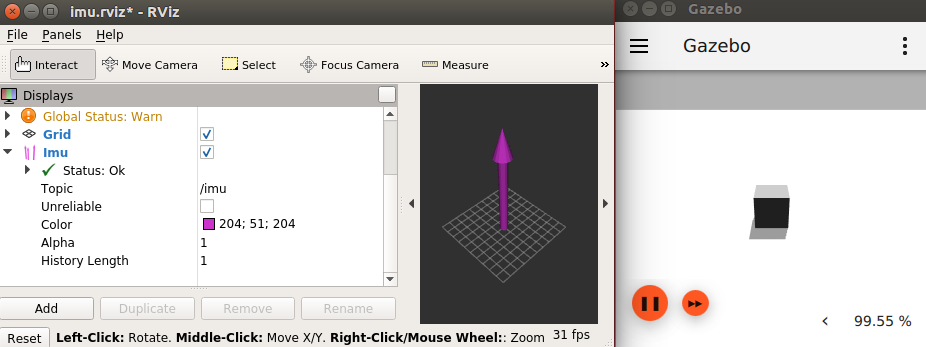
IMU
Publishes IMU readings.
roslaunch ros_ign_gazebo_demos imu.launch
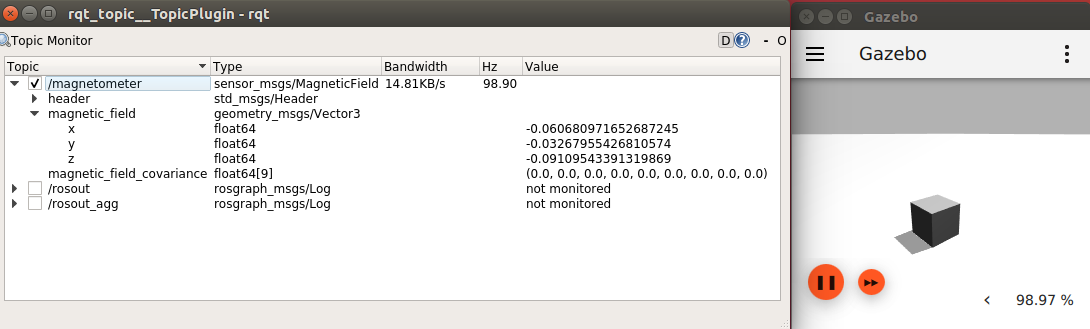
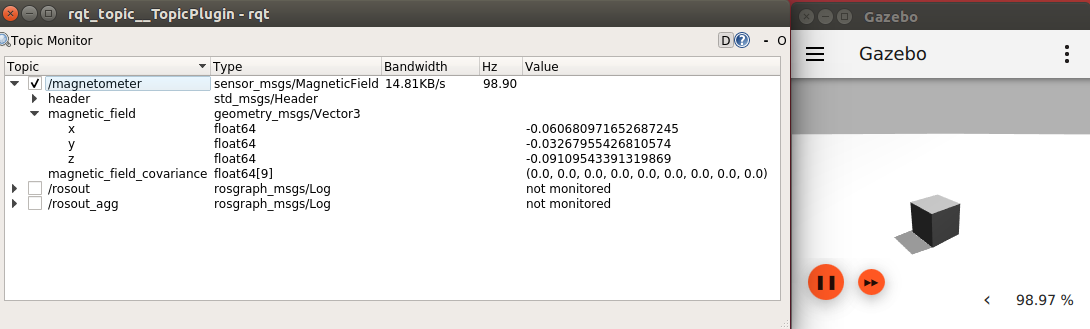
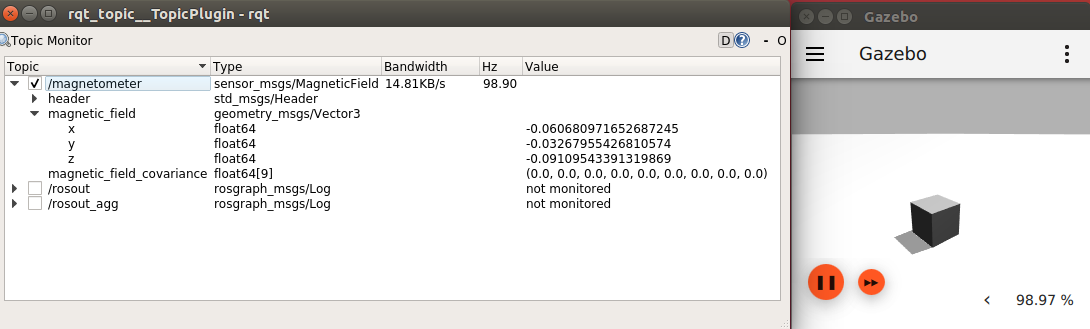
Magnetometer
Publishes magnetic field readings.
roslaunch ros_ign_gazebo_demos magnetometer.launch
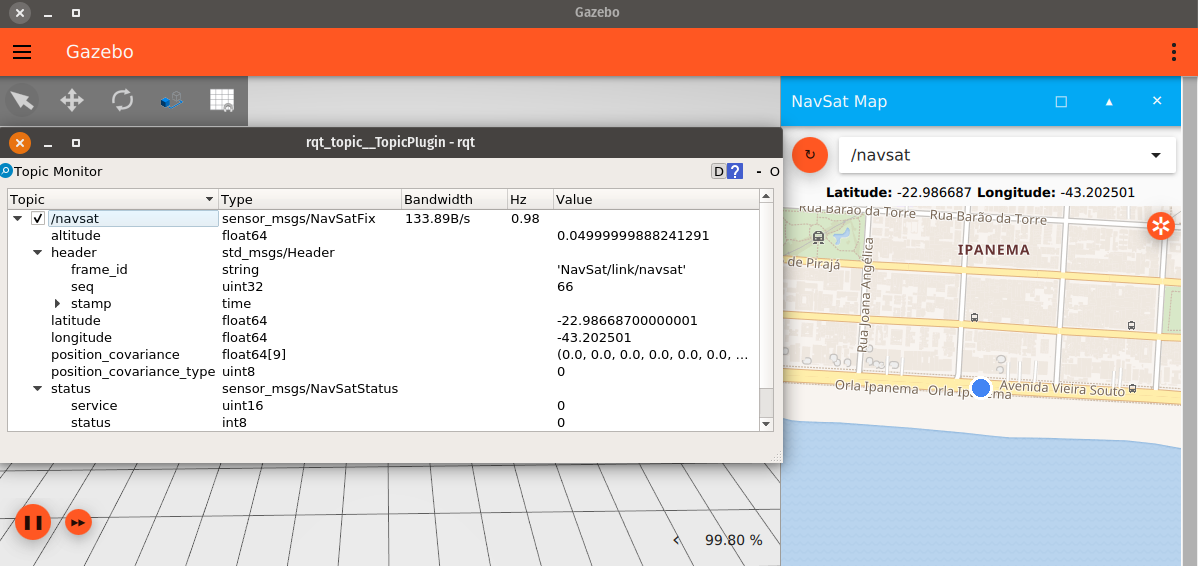
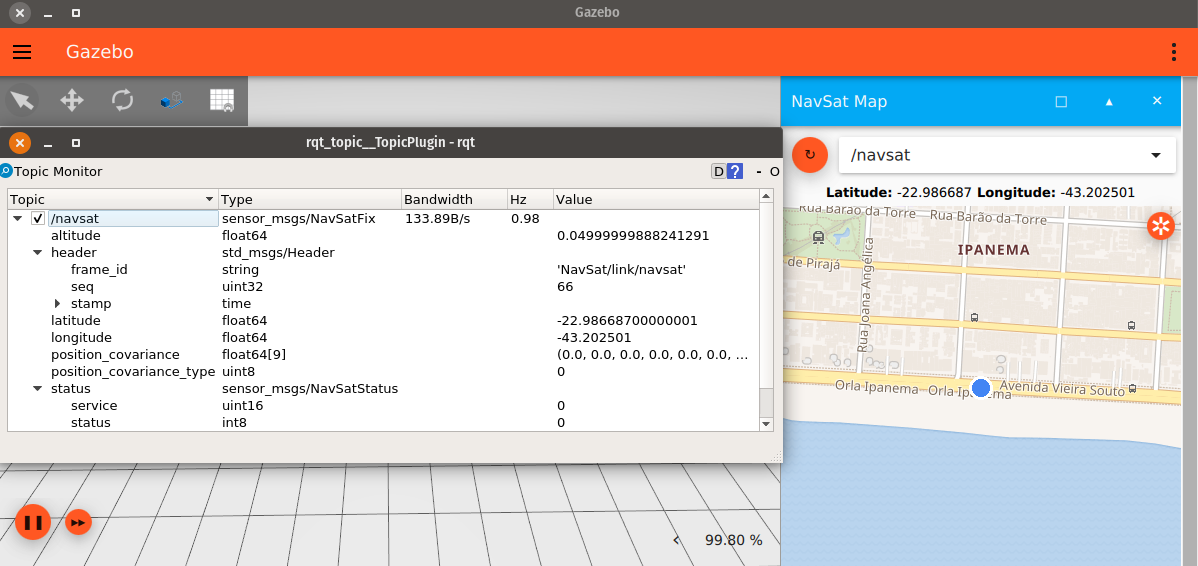
GNSS
Publishes satellite navigation readings, only available in Ignition releases from Fortress on.
roslaunch ros_ign_gazebo_demos navsat.launch
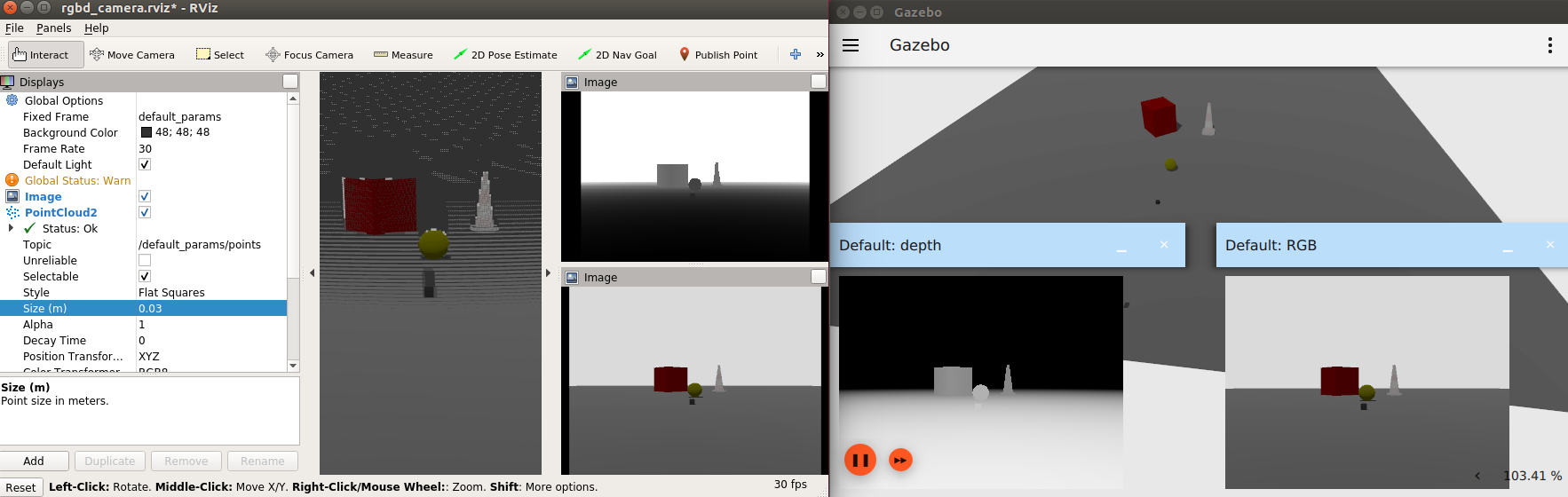
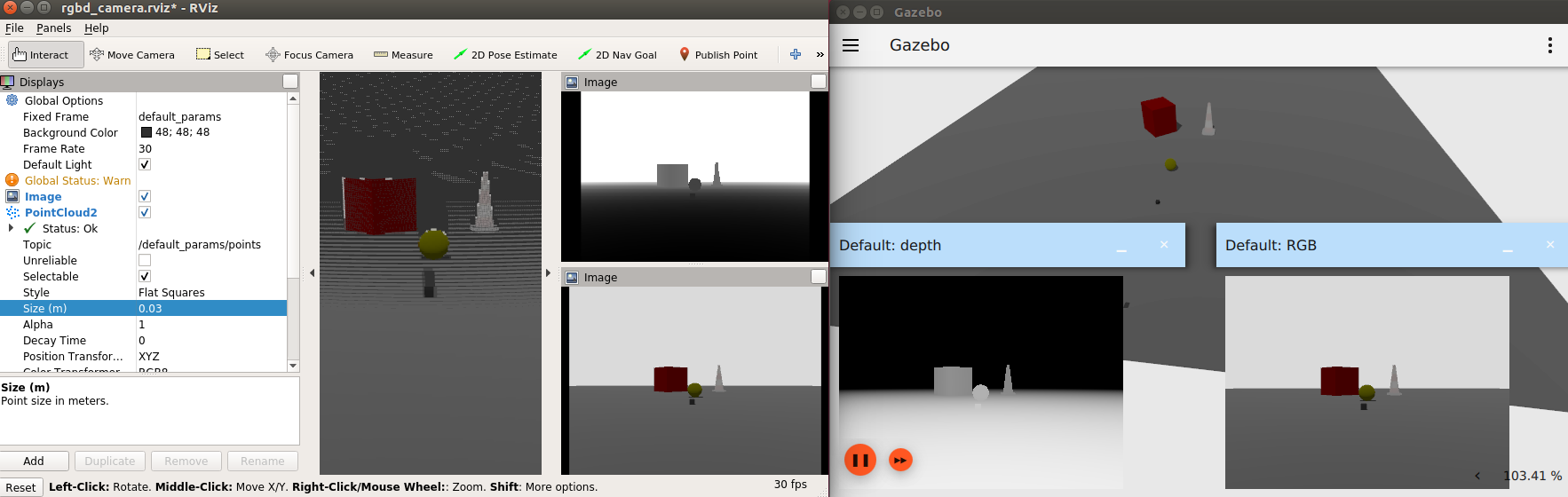
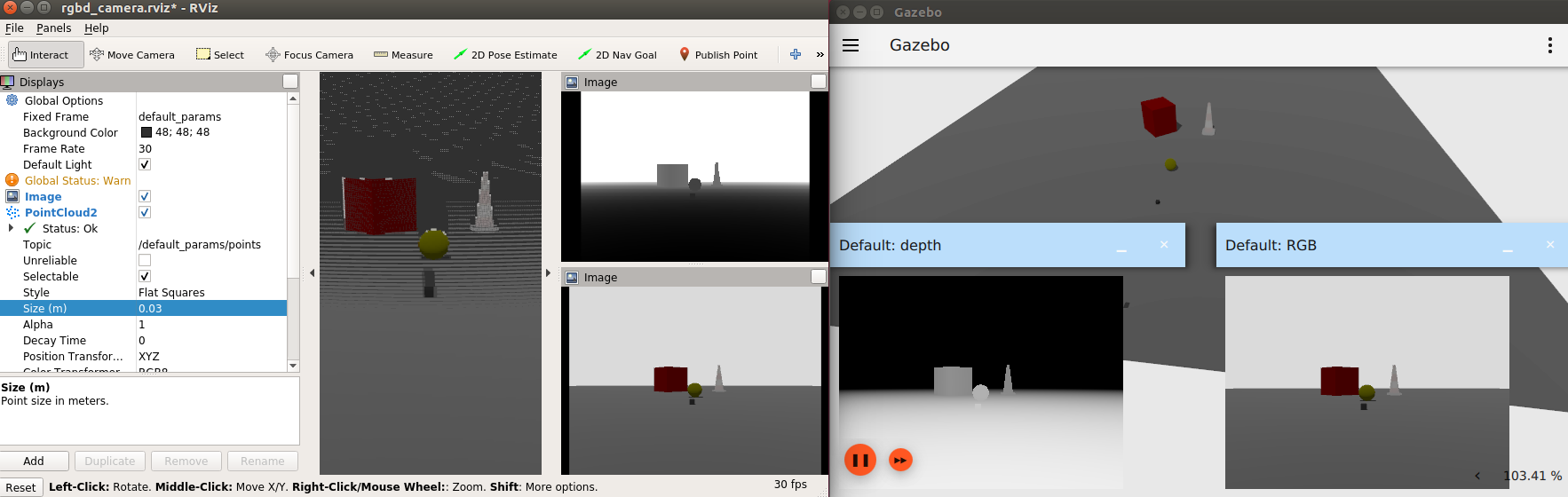
RGBD camera
RGBD camera data can be obtained as:
-
sensor_msgs/Image, throughros_ign_bridgeorros_ign_image -
sensor_msgs/PointCloud2, throughros_ign_bridgeorros_ign_point_cloud(See issue #40)
Using the image bridge (unidirectional, uses image_transport):
roslaunch ros_ign_gazebo_demos image_bridge.launch
Using the regular bridge:
roslaunch ros_ign_gazebo_demos rgbd_camera_bridge.launch
Using Ignition Gazebo plugin:
roslaunch ros_ign_gazebo_demos rgbd_camera.launch
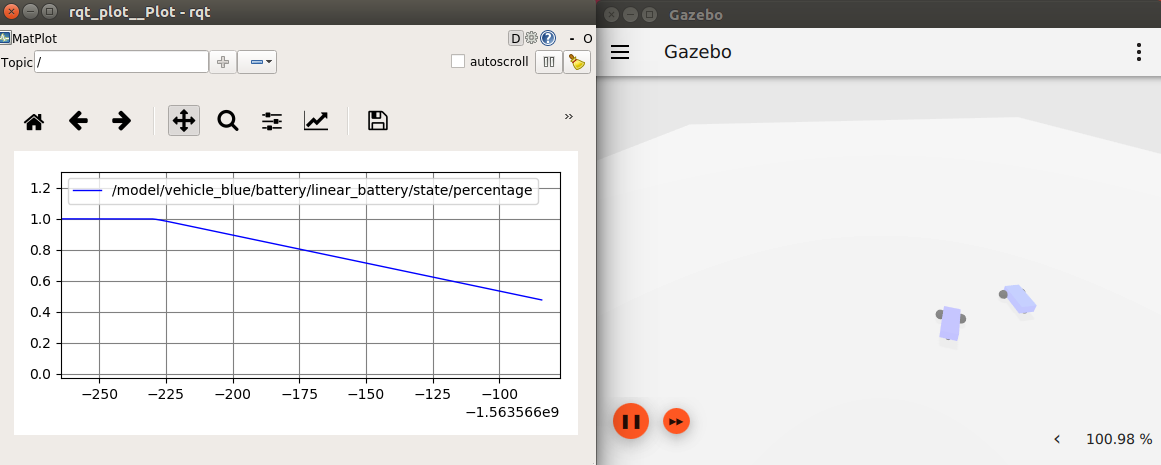
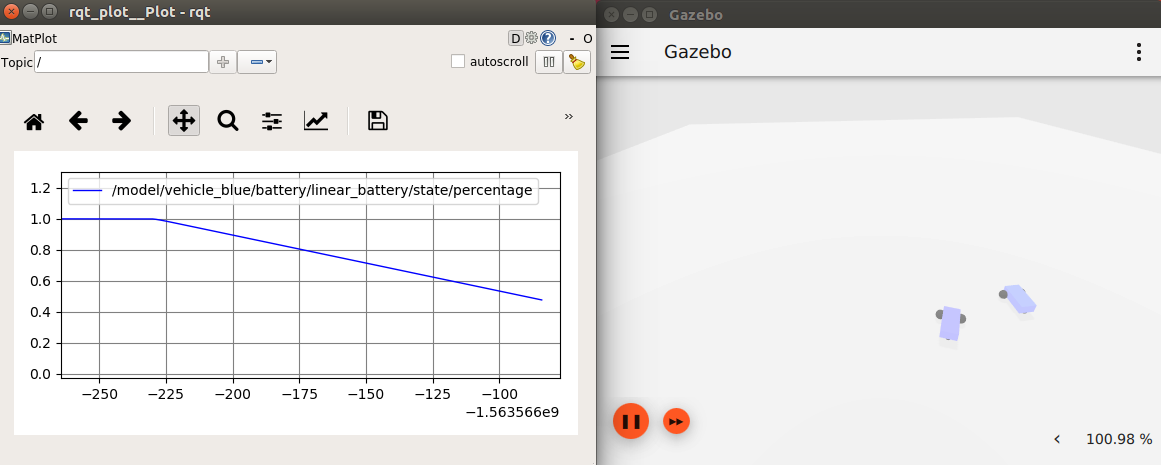
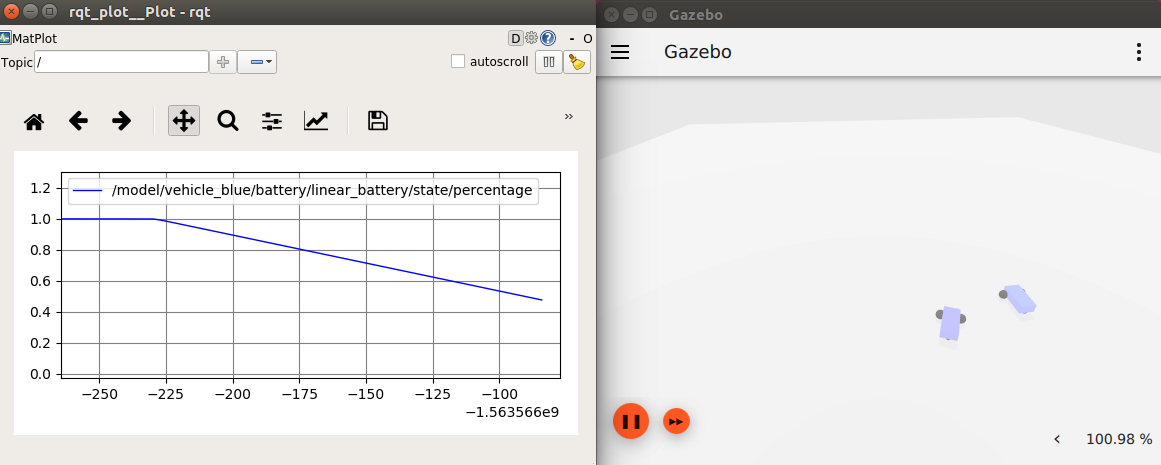
Battery
Get the current state of a battery.
roslaunch ros_ign_gazebo_demos battery.launch
Then send a command so the vehicle moves and drains the battery
rostopic pub /model/vehicle_blue/cmd_vel geometry_msgs/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"
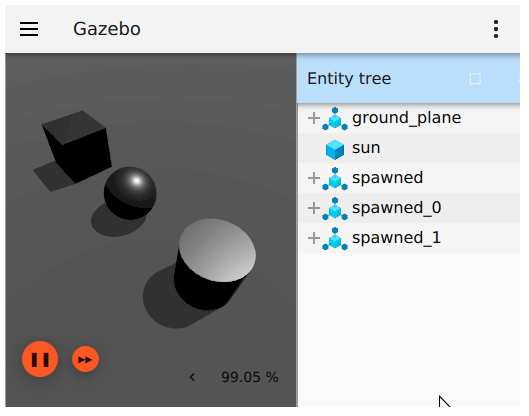
Create entity
Launch simulation and spawn entities:
- Sphere from URDF loaded into ROS param
- Box from SDF file on Ignition Fuel
- Cylinder from SDF file
roslaunch ros_ign_gazebo_demos create.launch
Changelog for package ros_ign_gazebo_demos
0.111.2 (2021-12-30)
- [noetic]
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | catkin | |
| 1 | image_transport_plugins | |
| 2 | ros_ign_bridge | |
| 2 | ros_ign_gazebo | |
| 2 | ros_ign_image | |
| 1 | rqt_image_view | |
| 1 | rqt_plot | |
| 1 | rqt_topic | |
| 1 | rviz |
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| ros_ign | github-ignitionrobotics-ros_ign |
Launch files
- launch/rgbd_camera_bridge.launch
- launch/create.launch
-
- world [default: empty]
- ign_args [default: ]
- launch/rgbd_camera.launch
- launch/depth_camera.launch
- launch/battery.launch
- launch/diff_drive.launch
- launch/gpu_lidar.launch
- launch/air_pressure.launch
- launch/gpu_lidar_bridge.launch
- launch/depth_camera_bridge.launch
- launch/camera.launch
- launch/navsat.launch
- launch/imu.launch
- launch/magnetometer.launch
- launch/image_bridge.launch
Messages
Services
Plugins
Recent questions tagged ros_ign_gazebo_demos at Robotics Stack Exchange
|
|
ros_ign_gazebo_demos package from ros_ign reporos_ign ros_ign_bridge ros_ign_gazebo ros_ign_gazebo_demos ros_ign_image ros_ign_interfaces ros_ign_point_cloud |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.233.4 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ignitionrobotics/ros_ign.git |
| VCS Type | git |
| VCS Version | galactic |
| Last Updated | 2022-09-23 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Louise Poubel
Authors
ROS + Ignition Gazebo demos
This package contains demos showing how to use Ignition Gazebo with ROS.
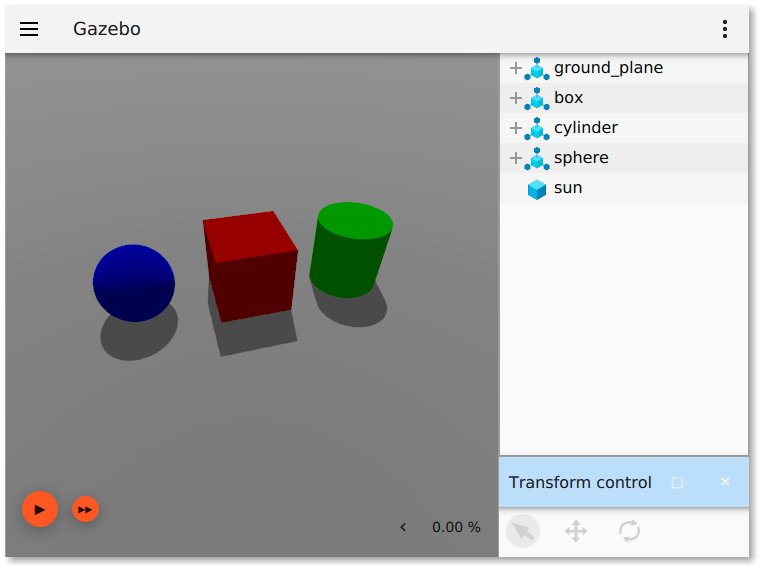
Run Ignition Gazebo
There's a convenient launch file, try for example:
ros2 launch ros_ign_gazebo ign_gazebo.launch.py ign_args:="shapes.sdf"
Air pressure
Publishes fluid pressure readings.
ros2 launch ros_ign_gazebo_demos air_pressure.launch.py
This demo also shows the use of custom QoS parameters. The sensor data is published as as "best-effort", so trying to subscribe to "reliable" data won't work. See the difference between:
ros2 topic echo /air_pressure --qos-reliability best_effort
And
ros2 topic echo /air_pressure --qos-reliability reliable
Camera
Publishes RGB camera image and info.
Images can be exposed to ROS through ros_ign_bridge or ros_ign_image.
Using the image bridge (unidirectional, uses image_transport):
ros2 launch ros_ign_gazebo_demos image_bridge.launch.py
Using the regular bridge:
ros2 launch ros_ign_gazebo_demos camera.launch.py
Diff drive
Send commands to a differential drive vehicle and listen to its odometry.
ros2 launch ros_ign_gazebo_demos diff_drive.launch.py
Then unpause and send a command
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"
This demo also shows the use of custom QoS parameters. The commands are subscribed to as "reliable", so trying to publish "best-effort" commands won't work. See the difference between:
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.0}}" --qos-reliability reliable
And
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.0}}" --qos-reliability best_effort
Depth camera
Depth camera data can be obtained as:
-
sensor_msgs/msg/Image, throughros_ign_bridgeorros_ign_image -
sensor_msgs/msg/PointCloud2, throughros_ign_point_cloud
Using the image bridge (unidirectional, uses image_transport):
ros2 launch ros_ign_gazebo_demos image_bridge.launch.py image_topic:=/depth_camera
TODO: Blocked by ros_ign_point_cloud issue.
Using Ignition Gazebo plugin:
ros2 launch ros_ign_gazebo_demos depth_camera.launch.py
GPU lidar
GPU lidar data can be obtained as:
-
sensor_msgs/msg/LaserScan, through theros_ign_bridge -
sensor_msgs/msg/PointCloud2, through theros_ign_bridgeorros_ign_point_cloud
Using the bridge:
ros2 launch ros_ign_gazebo_demos gpu_lidar_bridge.launch.py
TODO: Blocked by ros_ign_point_cloud issue.
Using Ignition Gazebo plugin:
ros2 launch ros_ign_gazebo_demos gpu_lidar.launch.py
IMU
Publishes IMU readings.
ros2 launch ros_ign_gazebo_demos imu.launch.py
TODO: IMU display missing for RViz2
Magnetometer
Publishes magnetic field readings.
ros2 launch ros_ign_gazebo_demos magnetometer.launch.py
GNSS
Publishes satellite navigation readings, only available in Fortress on.
ros2 launch ros_ign_gazebo_demos navsat.launch.py
RGBD camera
RGBD camera data can be obtained as:
-
sensor_msgs/msg/Image, throughros_ign_bridgeorros_ign_image -
sensor_msgs/msg/PointCloud2, throughros_ign_bridgeorros_ign_point_cloud
Using the image bridge (unidirectional, uses image_transport):
# RGB image
ros2 launch ros_ign_gazebo_demos image_bridge.launch.py image_topic:=/rgbd_camera/image
# Depth image
ros2 launch ros_ign_gazebo_demos image_bridge.launch.py image_topic:=/rgbd_camera/depth_image
Using the regular bridge:
ros2 launch ros_ign_gazebo_demos rgbd_camera_bridge.launch.py
TODO: Blocked by ros_ign_point_cloud issue.
Using Ignition Gazebo plugin:
ros2 launch ros_ign_gazebo_demos rgbd_camera.launch.py
Battery
Get the current state of a battery.
ros2 launch ros_ign_gazebo_demos battery.launch.py
Then send a command so the vehicle moves and drains the battery
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"
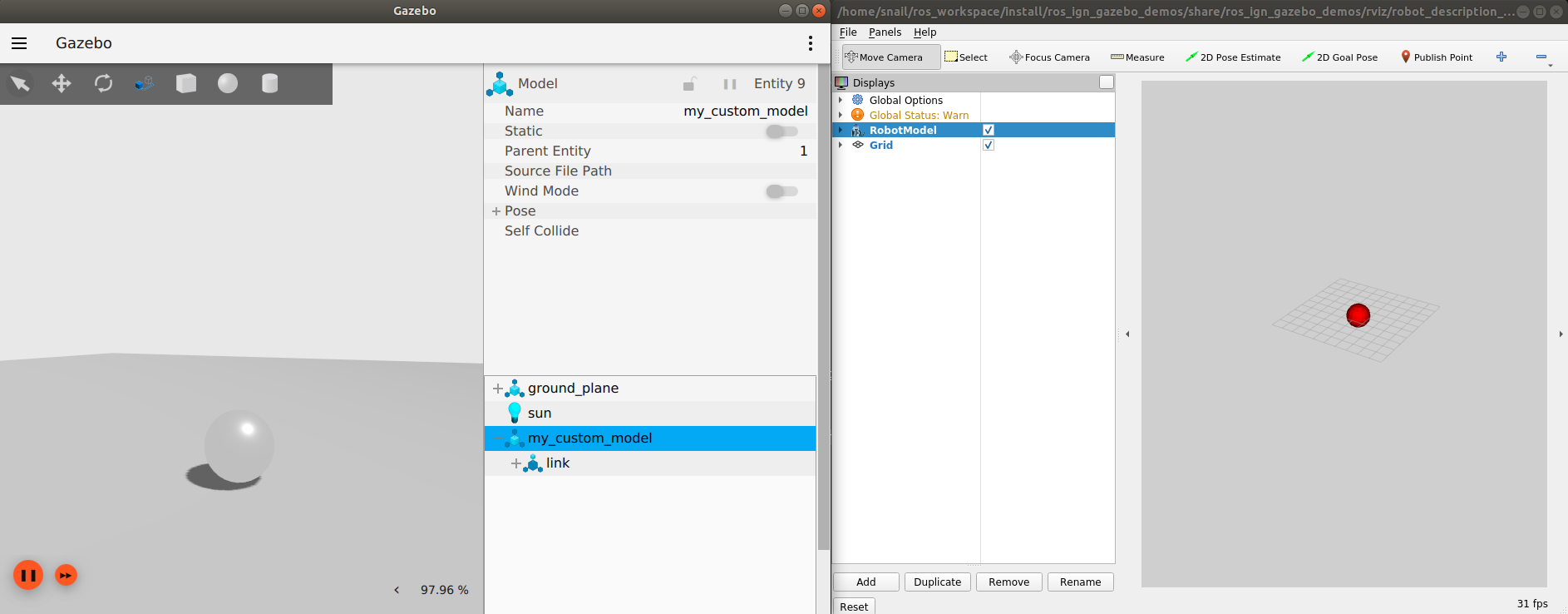
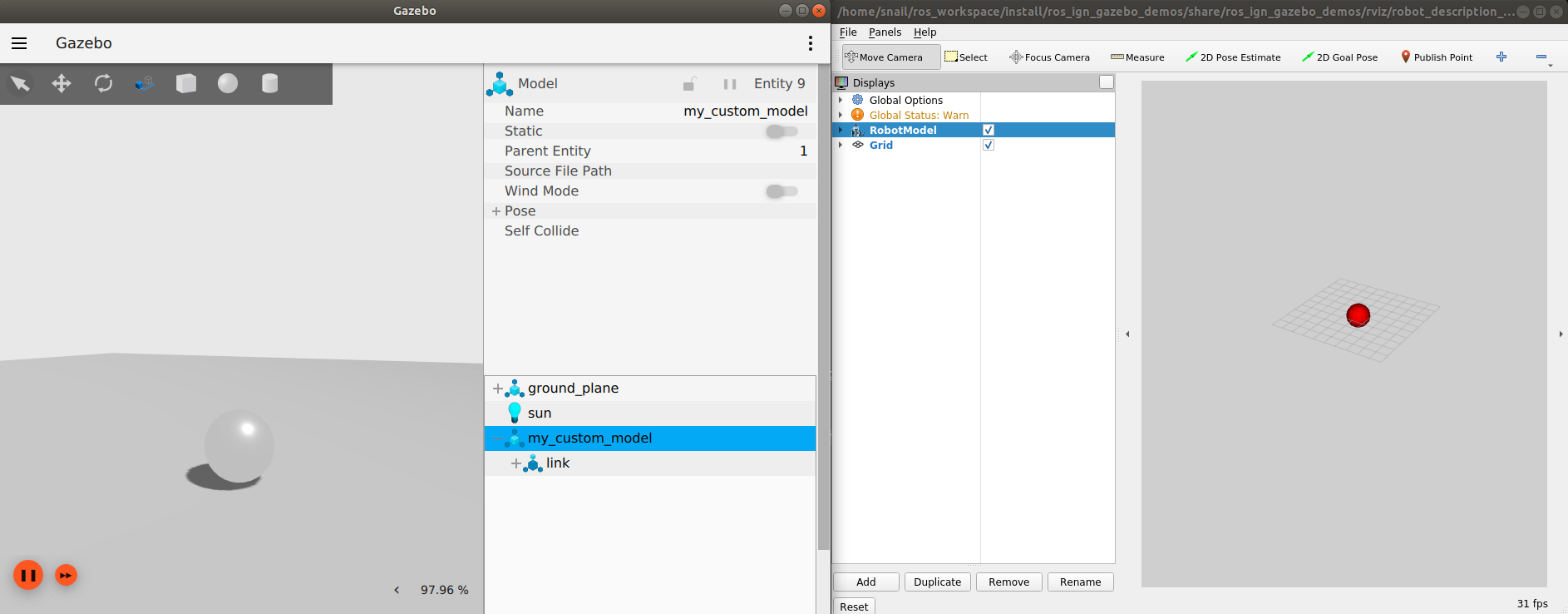
Robot description publisher
Leverage the robot description publisher to spawn a new urdf model in gazebo and show it in rviz2. To try the demo launch:
ros2 launch ros_ign_gazebo_demos robot_description_publisher.launch.py
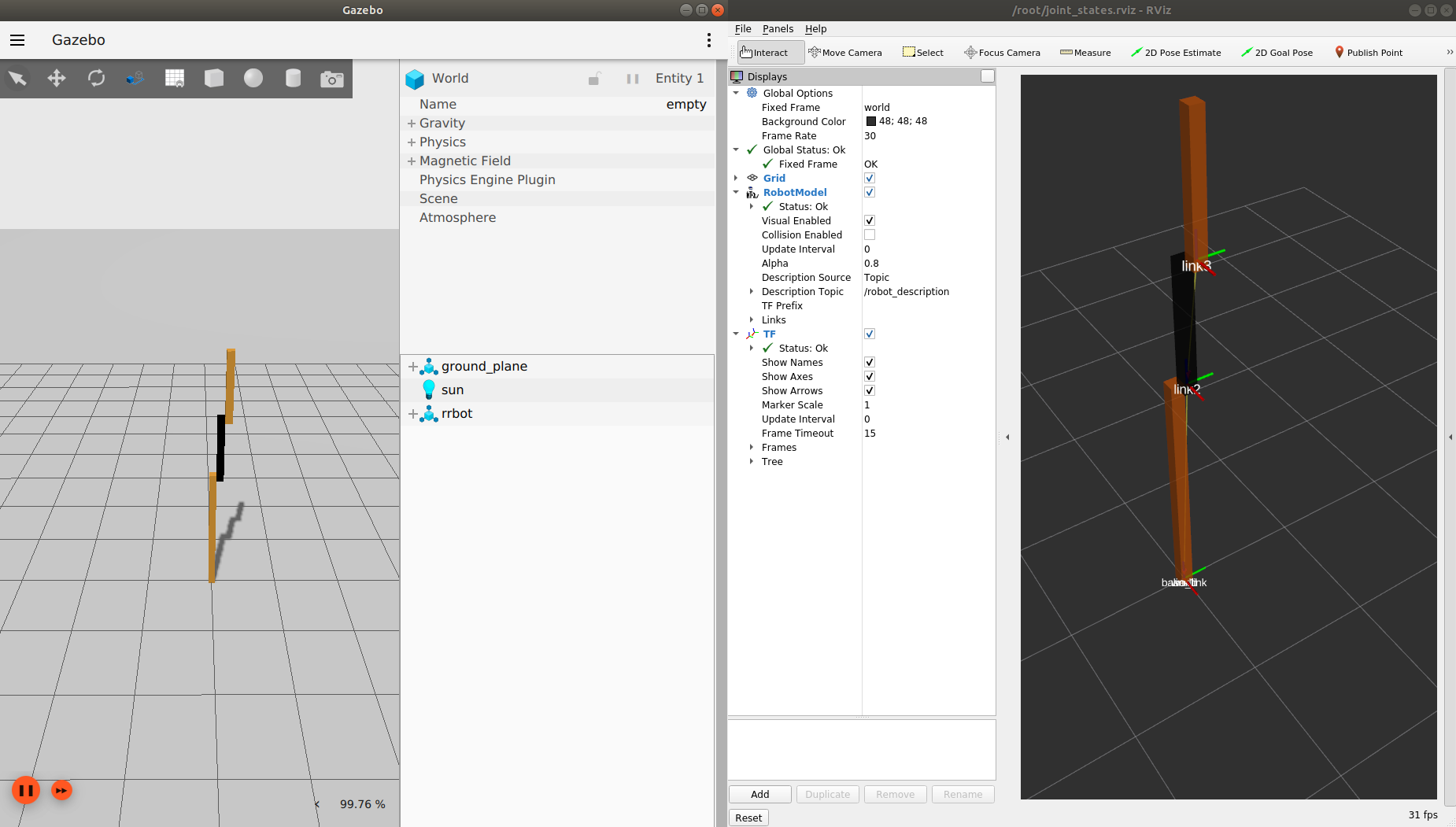
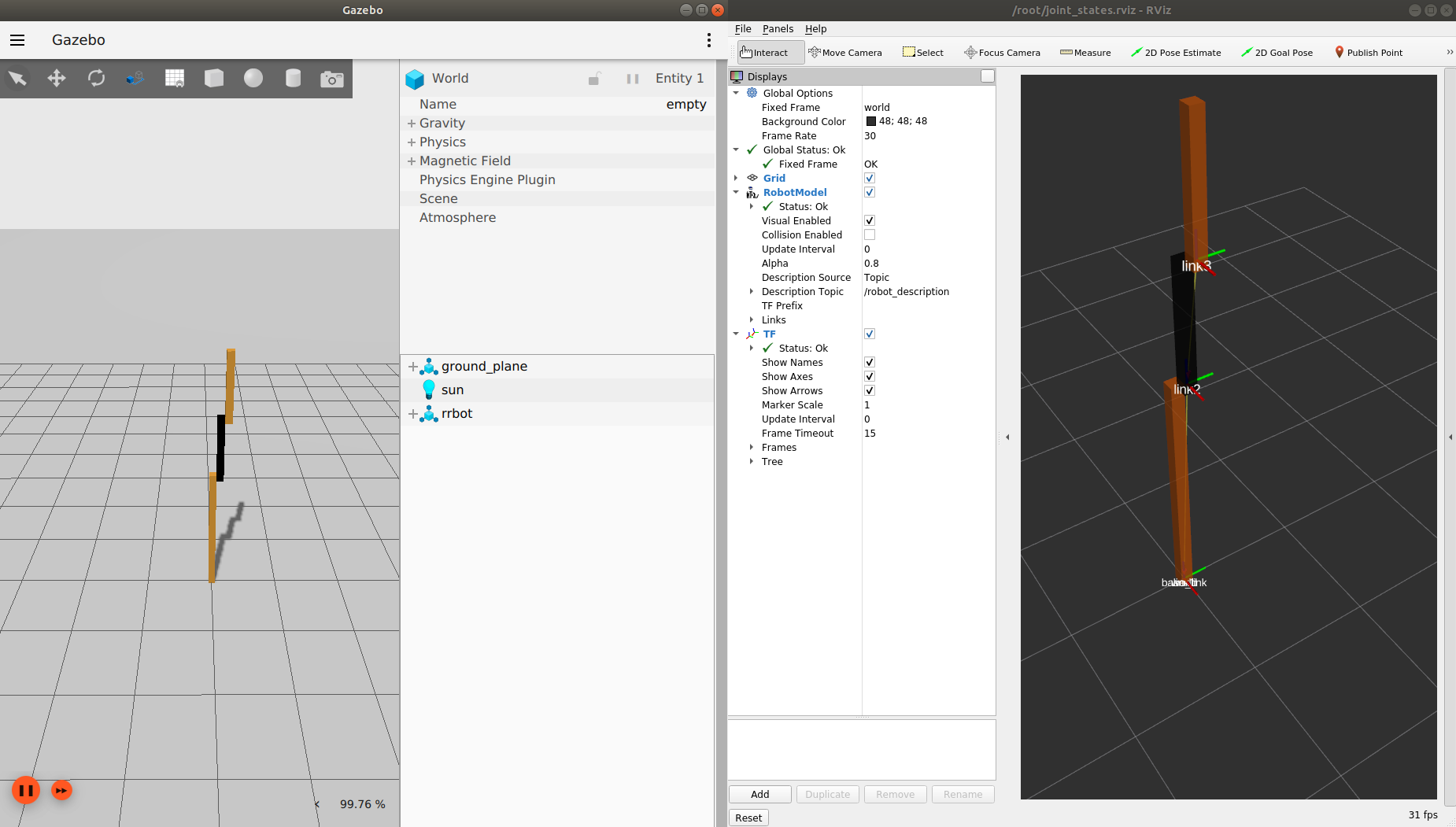
Joint States Publisher
Publishes joint states of the robot.
To try the demo launch:
ros2 launch ros_ign_gazebo_demos joint_states.launch.py
Changelog for package ros1_ign_gazebo_demos
0.233.4 (2022-02-07)
0.233.3 (2021-12-30)
- Separate galactic branch from ros2 branch (#201)
- [ros2]
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | ament_cmake | |
| 1 | image_transport_plugins | |
| 2 | robot_state_publisher | |
| 2 | ros_ign_bridge | |
| 2 | ros_ign_gazebo | |
| 2 | ros_ign_image | |
| 1 | rqt_image_view | |
| 1 | rqt_plot | |
| 1 | rqt_topic | |
| 1 | rviz2 | |
| 1 | xacro |
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| ros_ign | github-ignitionrobotics-ros_ign |
Launch files
Messages
Services
Plugins
Recent questions tagged ros_ign_gazebo_demos at Robotics Stack Exchange
|
|
ros_ign_gazebo_demos package from ros_ign reporos_ign ros_ign_bridge ros_ign_gazebo ros_ign_gazebo_demos ros_ign_image ros_ign_interfaces ros_ign_point_cloud |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.221.2 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ignitionrobotics/ros_ign.git |
| VCS Type | git |
| VCS Version | foxy |
| Last Updated | 2023-06-08 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Alejandro Hernandez Cordero
Authors
- Louise Poubel
ROS + Ignition Gazebo demos
This package contains demos showing how to use Ignition Gazebo with ROS.
Run Ignition Gazebo
There's a convenient launch file, try for example:
ros2 launch ros_ign_gazebo ign_gazebo.launch.py ign_args:="shapes.sdf"
Air pressure
Publishes fluid pressure readings.
ros2 launch ros_ign_gazebo_demos air_pressure.launch.py
Camera
Publishes RGB camera image and info.
Images can be exposed to ROS through ros_ign_bridge or ros_ign_image.
Using the image bridge (unidirectional, uses image_transport):
ros2 launch ros_ign_gazebo_demos image_bridge.launch.py
Using the regular bridge:
ros2 launch ros_ign_gazebo_demos camera.launch.py
Diff drive
Send commands to a differential drive vehicle and listen to its odometry.
ros2 launch ros_ign_gazebo_demos diff_drive.launch.py
Then unpause and send a command
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"
Depth camera
Depth camera data can be obtained as:
-
sensor_msgs/msg/Image, throughros_ign_bridgeorros_ign_image -
sensor_msgs/msg/PointCloud2, throughros_ign_point_cloud
Using the image bridge (unidirectional, uses image_transport):
ros2 launch ros_ign_gazebo_demos image_bridge.launch.py image_topic:=/depth_camera
TODO: Blocked by ros_ign_point_cloud issue.
Using Ignition Gazebo plugin:
ros2 launch ros_ign_gazebo_demos depth_camera.launch.py
GPU lidar
GPU lidar data can be obtained as:
-
sensor_msgs/msg/LaserScan, through theros_ign_bridge -
sensor_msgs/msg/PointCloud2, through theros_ign_bridgeorros_ign_point_cloud
Using the bridge:
ros2 launch ros_ign_gazebo_demos gpu_lidar_bridge.launch.py
TODO: Blocked by ros_ign_point_cloud issue.
Using Ignition Gazebo plugin:
ros2 launch ros_ign_gazebo_demos gpu_lidar.launch.py
IMU
Publishes IMU readings.
ros2 launch ros_ign_gazebo_demos imu.launch.py
TODO: IMU display missing for RViz2
Magnetometer
Publishes magnetic field readings.
ros2 launch ros_ign_gazebo_demos magnetometer.launch.py
RGBD camera
RGBD camera data can be obtained as:
-
sensor_msgs/msg/Image, throughros_ign_bridgeorros_ign_image -
sensor_msgs/msg/PointCloud2, throughros_ign_bridgeorros_ign_point_cloud
Using the image bridge (unidirectional, uses image_transport):
# RGB image
ros2 launch ros_ign_gazebo_demos image_bridge.launch.py image_topic:=/rgbd_camera/image
# Depth image
ros2 launch ros_ign_gazebo_demos image_bridge.launch.py image_topic:=/rgbd_camera/depth_image
Using the regular bridge:
ros2 launch ros_ign_gazebo_demos rgbd_camera_bridge.launch.py
TODO: Blocked by ros_ign_point_cloud issue.
Using Ignition Gazebo plugin:
ros2 launch ros_ign_gazebo_demos rgbd_camera.launch.py
Battery
Get the current state of a battery.
ros2 launch ros_ign_gazebo_demos battery.launch.py
Then send a command so the vehicle moves and drains the battery
ros2 topic pub /model/vehicle_blue/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 5.0}, angular: {z: 0.5}}"
Robot description publisher
Leverage the robot description publisher to spawn a new urdf model in gazebo and show it in rviz2. To try the demo launch:
ros2 launch ros_ign_gazebo_demos robot_description_publisher.launch.py
Joint States Publisher
Publishes joint states of the robot.
To try the demo launch:
ros2 launch ros_ign_gazebo_demos joint_states.launch.py
Changelog for package ros1_ign_gazebo_demos
0.221.2 (2021-07-20)
- Joint states tutorial (#156) Adds an rrbot model to demos and shows the usage of joint_states plugin.
- [ros2] Minor updates for demos
(#144)
- Re-enable air pressure demo
- Resolves https://github.com/ignitionrobotics/ros_ign/issues/78
- Add RQt topic viewer to IMU demo
- Add image_topic argument for image_bridge demo
- Do not normalize depth image in RViz2
- [foxy] Edifice support (#140)
- Add topic flag to create robot (#128) Now it is possible to run ros_ign_gazebo create specifying a topic as source of the robot description Add a launch file starting a ignition gazebo world and spawn a sphere in it. Additionally a rviz2 interface is loaded to show that also Rviz can load the robot description The newly created demo introduce a dependency on the robot_state_publisher package
- [ros2] Update releases (#108)
- Contributors: Andrej Orsula, Louise Poubel, Valerio Magnago, Vatan Aksoy Tezer
0.221.1 (2020-08-19)
0.221.0 (2020-07-23)
- Updated launch file to use ros_ign_gazebo (#82) Co-authored-by: Louise Poubel <louise@openrobotics.org>
- Use new ros_ign_gazebo package on ROS 2 demos (#85) Co-authored-by: Alejandro Hern
Wiki Tutorials
Source Tutorials
Package Dependencies
| Deps | Name | |
|---|---|---|
| 1 | ament_cmake | |
| 1 | image_transport_plugins | |
| 2 | robot_state_publisher | |
| 2 | ros_ign_bridge | |
| 2 | ros_ign_gazebo | |
| 2 | ros_ign_image | |
| 1 | rqt_image_view | |
| 1 | rqt_plot | |
| 1 | rqt_topic | |
| 1 | rviz2 | |
| 1 | xacro |
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| ros_ign | github-ignitionrobotics-ros_ign |