
|
rclc package from rclc reporclc rclc_examples rclc_lifecycle rclc_parameter |
|
|
Package Summary
| Tags | No category tags. |
| Version | 4.0.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/rclc.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2023-12-15 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Jan Staschulat
- Pablo Garrido
Authors
- Jan Staschulat
- William Woodall
The rclc package
Table of contents
Introduction
Predictable execution under given real-time constraints is a crucial requirement for many robotic applications. While the service-based paradigm of ROS allows a fast integration of many different functionalities, it does not provide sufficient control over the execution management. For example, there are no mechanisms to enforce a certain execution order of callbacks within a node. Also the execution order of multiple nodes is essential for control applications in mobile robotics. Cause-effect-chains comprising of sensor acquisition, evaluation of data and actuation control should be mapped to ROS nodes executed in this order, however there are no explicit mechanisms to enforce it. Furthermore, when data recordings collected in field tests as ROS-bags are re-played, then the results are often surprisingly different due to non-determinism of process scheduling.
Manually setting up a particular execution order of subscriptions and publishing topics as well as defining use-case specific priorities of the corresponding Linux processes is always possible. However, this approach is error-prone, difficult to extend and requires an in-depth knowledge of the deployed ROS 2 packages in the system.
Therefore the goal of the Executor in micro-ROS is to support roboticists with practical and easy-to-use real-time mechanisms which provide solutions for: - Deterministic execution - Real-time guarantees - Integration of real-time and non real-time functionalities on one platform - Specific support for RTOS and microcontrollers
In ROS 1 a network thread is responsible for receiving all messages and putting them into a FIFO queue (in roscpp). That is, all callbacks were called in a FIFO manner, without any execution management. With the introduction of DDS (data distribution service) in ROS 2, the messages are buffered in DDS. In ROS 2, an Executor concept was introduced to support execution management. At the rcl-layer, a wait-set is configured with handles to be received and in a second step, the handles are taken from the DDS-queue. A handle is a generic term defined in rcl-layer for timers, subscriptions, services, clients and guard conditions.
The standard implementation of the ROS 2 Executor for the C++ API (rclcpp) has, however, certain unusual features, like precedence of timers over all other DDS handles, non-preemptive round-robin scheduling for non-timer handles and considering only one input data for each handle (even if multiple could be available). These features have the consequence, that in certain situations the standard rclcpp Executor is not deterministic and it makes guaranteeing real-time requirements very hard [CB2019]. We have not looked at the ROS 2 Executor implementation for Python Frontend (rclpy) because we consider a micro-controllers platform, on which typically C or C++ appliations will run.
Given the goals for a Real-Time Executor and the limitations of the ROS 2 standard rclcpp Executor, the challenges are: - to develop an adequate and well-defined scheduling mechanisms for the ROS 2 framework and the real-time operating system (RTOS) - to define an easy-to-use interface for ROS developers - to model requirements (like latencies, determinism in subsystems) - mapping of ROS 2 framework and operating system schedulers (semi-automated and optimized mapping is desired as well as generic, well-understood framework mechanisms)
Our approach is to provide a real-time-capable Executor for the rcl+rclc layer (as described in section Introduction to Client Library.) in the C programming language .
As the first step, we propose the rclc Executor for the rcl-layer in C programming language with several new features to support real-time and deterministic execution: It supports 1.) user-defined static sequential execution, 2) conditional execution semantics, 3) multi-threaded execution with scheduling configuration, and 4) logical execution semantics (LET). Sequential execution refers to the runtime behavior, that all callbacks are executed in a pre-defined order independent of the arrival time of messages. Conditional execution is available with a trigger condition which enables typical processing patterns in robotics (which are analyzed in detail in section Analysis of processing patterns. Configuration of scheduling parameters for multi-threaded application accomplishes prioritized execution. The logical execution time concept (LET) provides data synchronization for fixed periodic task scheduling of embedded applications.
Beyond the advanced execution management mechanisms for micro-ROS, we also contributed to improving and extending the Executor concept in rclcpp for standard ROS 2: the callback group-level Executor. It is not a new Executor but rather a refinement of the ROS 2 Executor API allowing to prioritize a group of callbacks which is not possible with the ROS 2 default Executor in its current Galactic release.
Analysis of rclcpp standard Executor
ROS 2 allows to bundle multiple nodes in one operating system process. To coordinate the execution of the callbacks of the nodes of a process, the Executor concept was introduced in rclcpp (and also in rclpy).
The ROS 2 design defines one Executor (instance of rclcpp::executor::Executor) per process, which is typically created either in a custom main function or by the launch system. The Executor coordinates the execution of all callbacks issued by these nodes by checking for available work (timers, services, messages, subscriptions, etc.) from the DDS queue and dispatching it to one or more threads, implemented in SingleThreadedExecutor and MultiThreadedExecutor, respectively.
The dispatching mechanism resembles the ROS 1 spin thread behavior: the Executor looks up the wait sets, which notifies it of any pending callback in the DDS queue. If there are multiple pending callbacks, the ROS 2 Executor executes them in an in the order as they were registered at the Executor.
Architecture
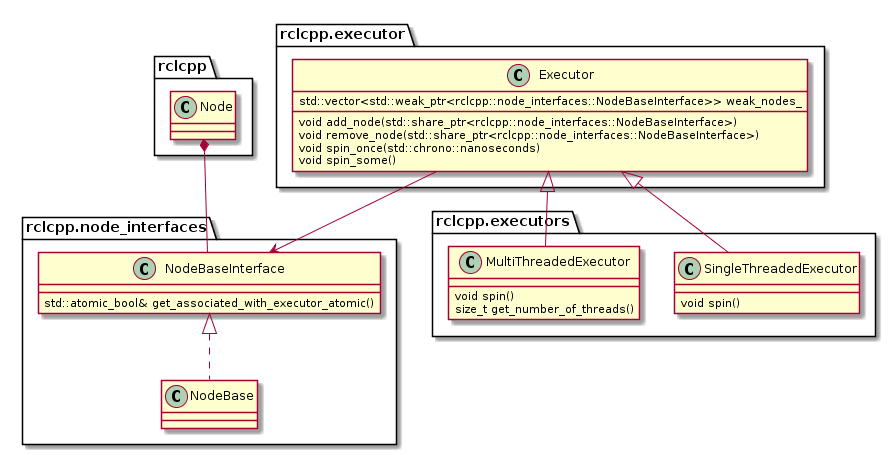
The following diagram depicts the relevant classes of the standard ROS 2 Executor implementation:
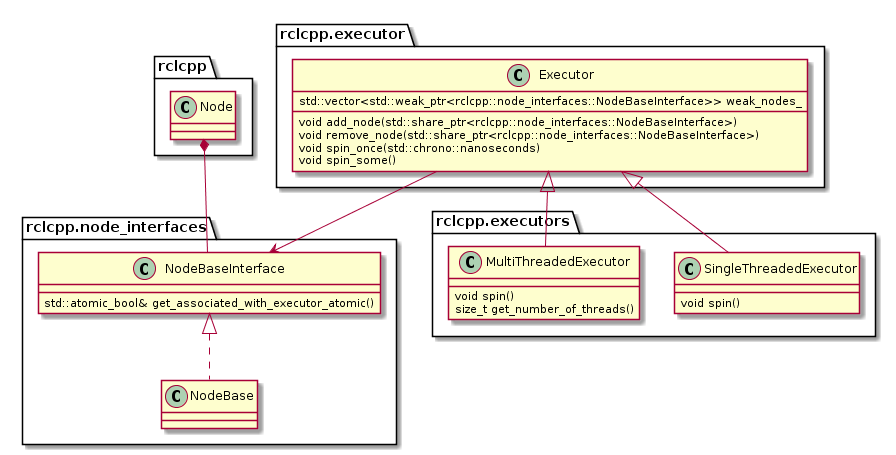
Note that an Executor instance maintains weak pointers to the NodeBaseInterfaces of the nodes only. Therefore, nodes can be destroyed safely, without notifying the Executor.
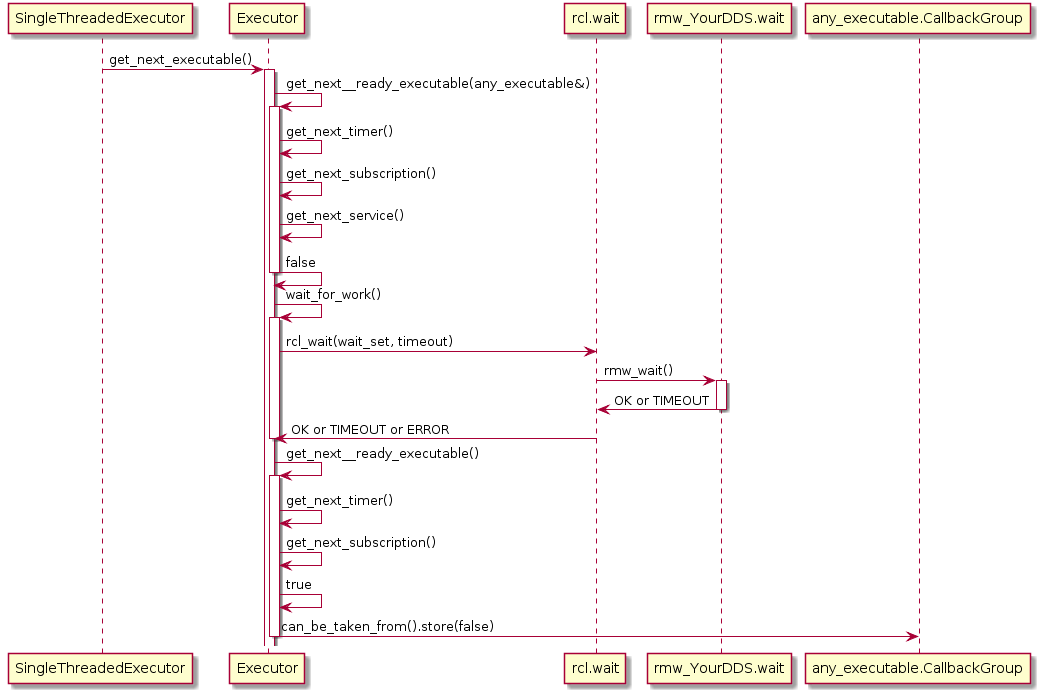
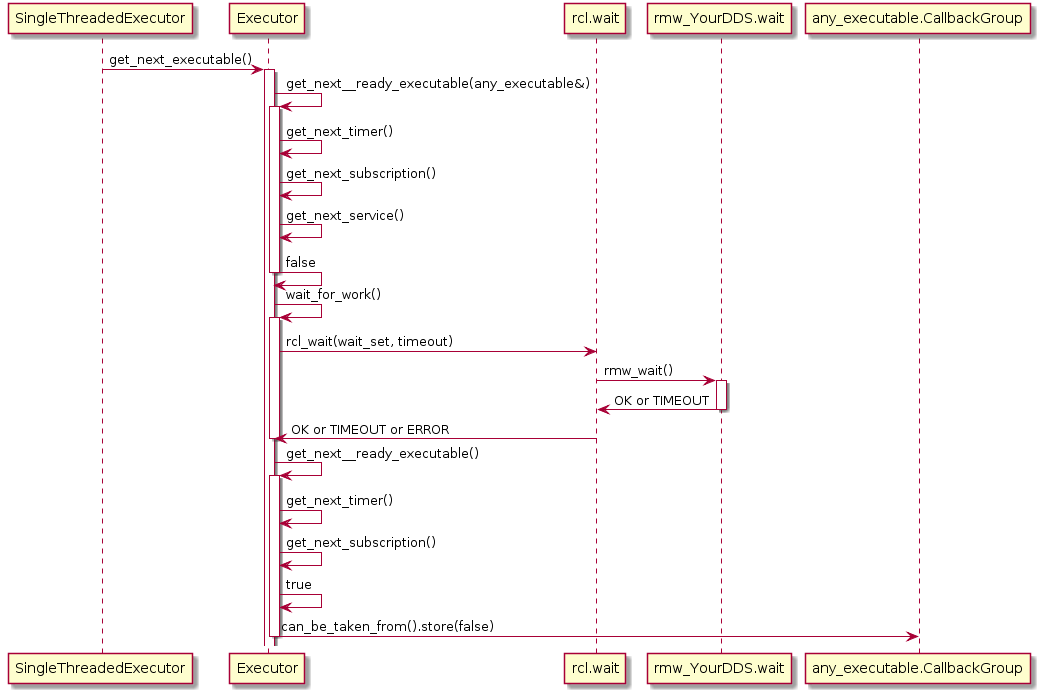
Also, the Executor does not maintain an explicit callback queue, but relies on the queue mechanism of the underlying DDS implementation as illustrated in the following sequence diagram:
The Executor concept, however, does not provide means for prioritization or categorization of the incoming callback calls. Moreover, it does not leverage the real-time characteristics of the underlying operating-system scheduler to have finer control on the order of executions. The overall implication of this behavior is that time-critical callbacks could suffer possible deadline misses and a degraded performance since they are serviced later than non-critical callbacks. Additionally, due to the FIFO mechanism, it is difficult to determine usable bounds on the worst-case latency that each callback execution may incur.
Scheduling Semantics
In a recent paper [CB2019], the rclcpp Executor has been analyzed in detail and a response time analysis of cause-effect chains has been proposed under reservation-based scheduling. The Executor distinguishes four categories of callbacks: timers, which are triggered by system-level timers, subscribers, which are triggered by new messages on a subscribed topic, services, which are triggered by service requests, and clients, which are triggered by responses to service requests. The Executor is responsible for taking messages from the input queues of the DDS layer and executing the corresponding callback. Since it executes callbacks to completion, it is a non-preemptive scheduler, However it does not consider all ready tasks for execution, but only a snapshot, called readySet. This readySet is updated when the Executor is idle and in this step it interacts with the DDS layer updating the set of ready tasks. Then for every type of task, there are dedicated queues (timers, subscriptions, services, clients) which are processed sequentially. The following undesired properties were pointed out:
- Timers have the highest priority. The Executor processes timers always first. This can lead to the intrinsic effect, that in overload situations messages from the DDS queue are not processed.
- Non-preemptive round-robin scheduling of non-timer handles. Messages arriving during the processing of the readySet are not considered until the next update, which depends on the execution time of all remaining callbacks. This leads to priority inversion, as lower-priority callbacks may implicitly block higher-priority callbacks by prolonging the current processing of the readySet.
- Only one message per handle is considered. The readySet contains only one task instance, For example, even if multiple messages of the same topic are available, only one instance is processed until the Executor is idle again and the readySet is updated from the DDS layer. This aggravates priority inversion, as a backlogged callback might have to wait for multiple processing of readySets until it is considered for scheduling. This means that non-timer callback instances might be blocked by multiple instances of the same lower-priority callback.
Due to these findings, the authors present an alternative approach to provide determinism and to apply well-known schedulability analyses to a ROS 2 systems. A response time analysis is described under reservation-based scheduling.
Analysis of processing patterns
The development of an execution management mechanism for micro-ROS is based on an analysis of processing patterns commonly used in robotics and embedded systems. First, typical processing patterns in mobile robotics are presented which are used to implement deterministic behavior. Then, the processing patterns in the real-time embedded systems are analyzed, in which, as a main difference, the time-triggered paradigm is applied to accomplish real-time behavior.
Sense-plan-act pipeline in robotics
Now we describe common software design patterns which are used in mobile robotics to achieve deterministic behavior. For each design pattern we describe the concept and the derived requirements for a deterministic Executor.
Concept:
A common design paradigm in mobile robotics is a control loop, consisting of several phases: A sensing phase to aquire sensor data, a plan phase for localization and path planning and an actuation-phase to steer the mobile robot. Of course, more phases are possible, here these three phases shall serve as an example. Such a processing pipeline is shown in Figure 1.

Typically multiple sensors are used to perceive the environment. For example an IMU and a laser scanner. The quality of localization algorithms highly depend on how old such sensor data is when it is processed. Ideally the latest data of all sensors should be processed. One way to achive this is to execute first all sensor drivers in the sense-phase and then process all algorithms in the plan-phase.
Currently, such a processing order cannot be defined with the default Executor of rclcpp. One could in principle design a data-driven pipeline, however if e.g. the Laser scan is needed by some other callback in the sense-phase as well as in the plan-phase, the processing order of these subscribers is arbitrary.
For this sense-plan-act pattern, we could define one executor for each phase. The plan-phase would be triggered only when all callbacks in the sense-phase have finished.
Derived requirements: - triggered execution
Synchronization of multiple rates
Concept:
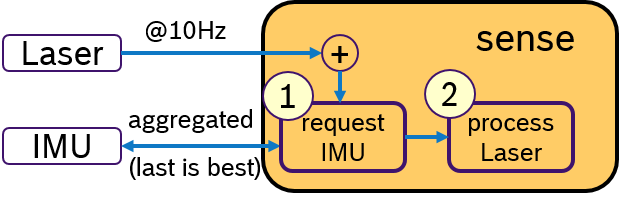
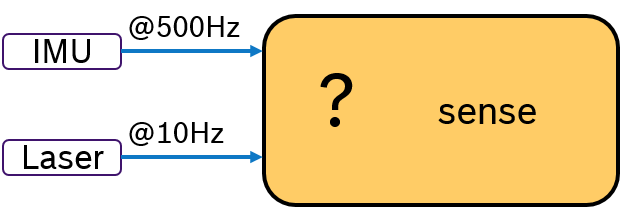
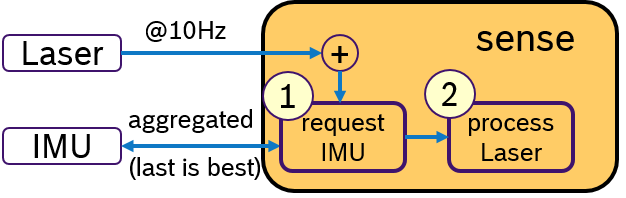
Often multiple sensors are being used to sense the environment for mobile robotics. While an IMU sensor provides data samples at a very high rate (e.g., 500 Hz), laser scans are availabe at a much slower frequency (e.g. 10Hz) determined by the revolution time. Then the challenge is, how to deterministically fuse sensor data with different frequencies. This problem is depicted in Figure 2.
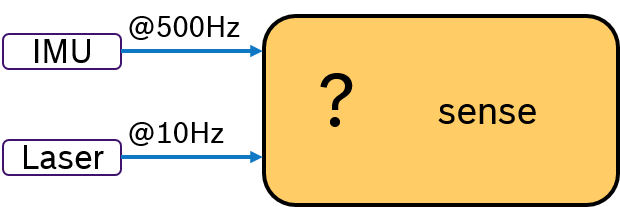
Due to scheduling effects, the callback for evaluating the laser scan might be called just before or just after an IMU data is received. One way to tackle this is to write additional synchronization code inside the application. Obviously, this is a cumbersome and not-portable solution.
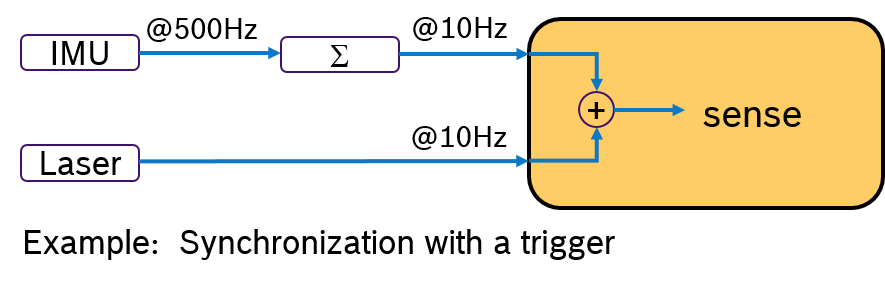
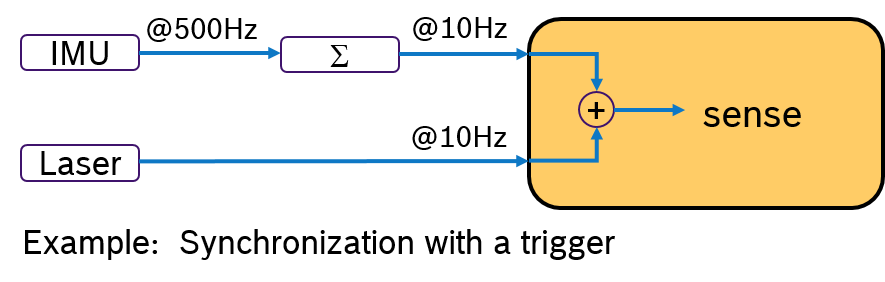
An Alternative would be to evalute the IMU sample and the laser scan by synchronizing their frequency. For example by processing always 50 IMU samples with one laser scan. This approach is shown in Figure 3. A pre-processing callback aggregates the IMU samples and sends an aggregated message with 50 samples at 10Hz rate. Now both messages have the same frequency. With a trigger condition, which fires when both messages are available, the sensor fusion algorithm can expect always synchronized input data.
In ROS 2, this is currently not possible to be modeled because of the lack of a trigger concept in the Executors of rclcpp and rclpy. Message filters could be used to synchronize input data based on the timestamp in the header, but this is only available in rclcpp (and not in rcl). Further more, it would be more efficient to have such a trigger concept directly in the Executor.
Another idea would be to activly request for IMU data only when a laser scan is received. This concept is shown in Figure 4. Upon arrival of a laser scan mesage, first, a message with aggregated IMU samples is requested. Then, the laser scan is processed and later the sensor fusion algorithm. An Executor, which would support sequential execution of callbacks, could realize this idea.
Derived requirements: - triggered execution - sequential procesing of callbacks
High-priority processing path
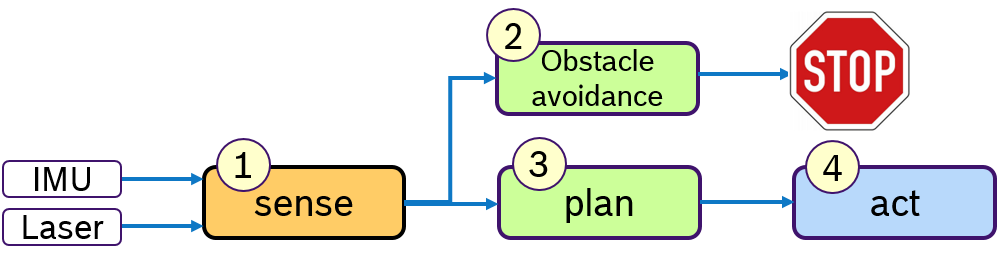
Concept Often a robot has to fullfill several activities at the same time. For example following a path and avoiding obstacles. While path following is a permanent activity, obstacle avoidance is trigged by the environment and should be immediately reacted upon. Therefore one would like to specify priorities to activities. This is depicted in Figure 5:
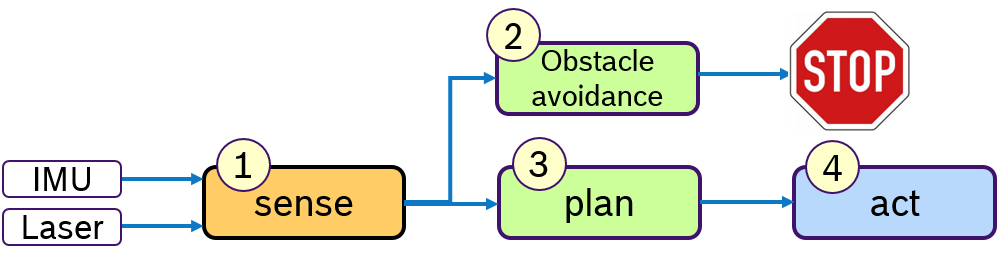
Assuming a simplified control loop with the activities sense-plan-act, the obstacle avoidance, which might temporarily stop the robot, should be processed before the planning phase. In this example we assume that these activites are processed in one thread.
Derived requirements: - sequential processing of callbacks
Real-time embedded applications
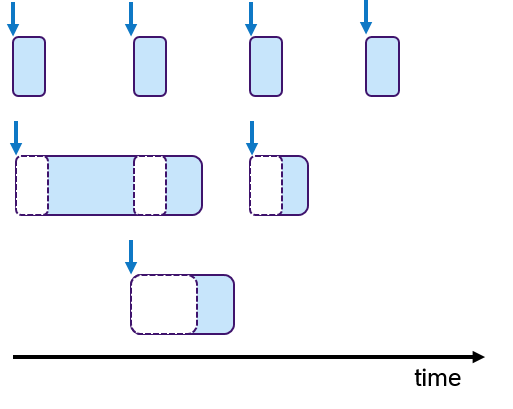
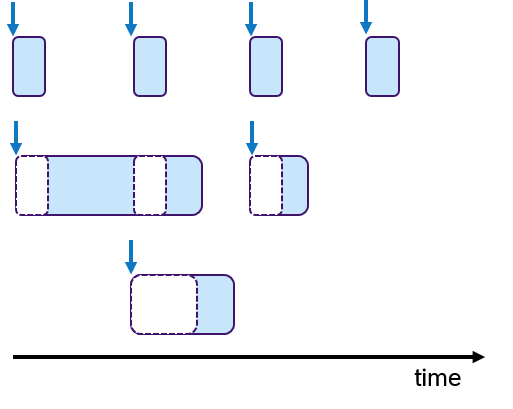
In embedded systems, real-time behavior is approached by using the time-triggered paradigm, which means that the processes are periodically activated. Processes can be assigned priorities to allow pre-emptions. Figure 6 shows an example, in which three processes with fixed periods are shown. The middle and lower process are preempted multiple times depicted with empty dashed boxes.
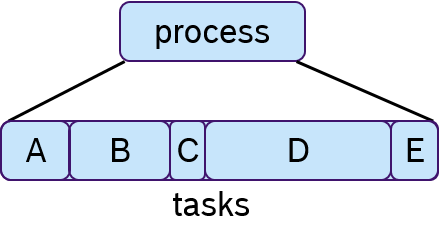
To each process one or multiple tasks can be assigned, as shown in Figure 7. These tasks are executed sequentially, which is often called cooperative scheduling.
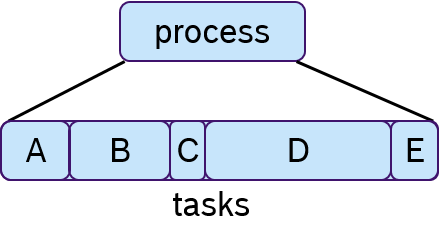
While there are different ways to assign priorities to a given number of processes, the rate-monotonic scheduling assignment, in which processes with a shorter period have a higher priority, has been shown optimal if the processor utilization is less than 69% [LL1973].
In the last decades many different scheduling approaches have been presented, however fixed-periodic preemptive scheduling is still widely used in embedded real-time systems [KZH2015]. This becomes also obvious, when looking at the features of current operating systems. Like Linux, real-time operating systems, such as NuttX, Zephyr, FreeRTOS, QNX etc., support fixed-periodic preemptive scheduling and the assignment of priorities, which makes the time-triggered paradigm the dominant design principle in this domain.
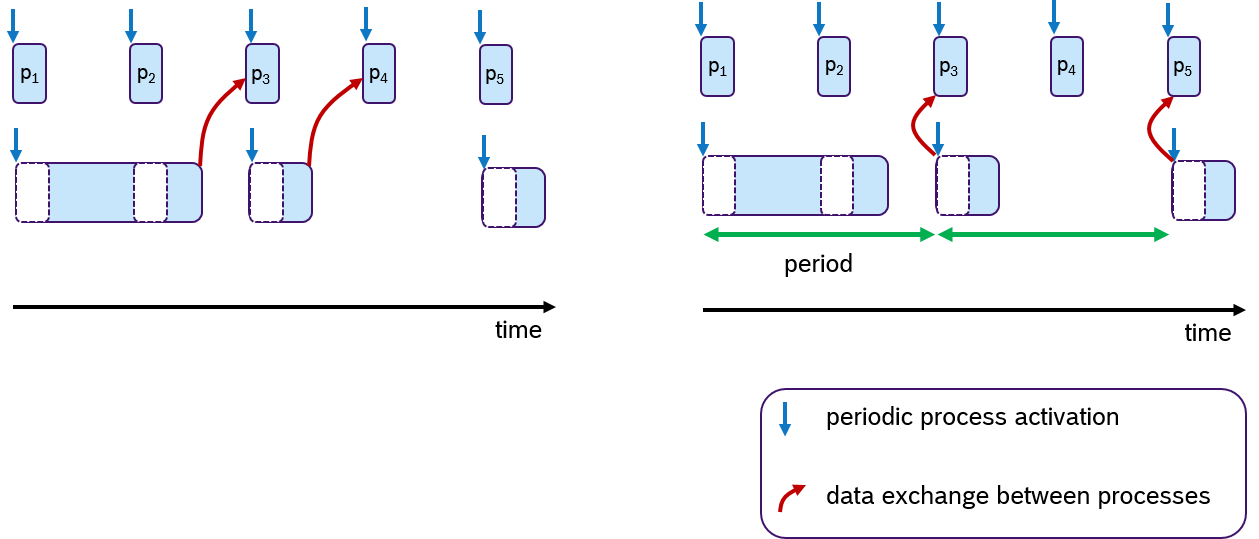
However, data consistency is often an issue when preemptive scheduling is used and if data is being shared across multiple processes via global variables. Due to scheduling effects and varying execution times of processes, writing and reading these variables could occur sometimes sooner or later. This results in an latency jitter of update times (the timepoint at which a variable change becomes visible to other processes). Race conditions can occur when multiple processes access a variable at the same time. So solve this problem, the concept of logical-execution time (LET) was introduced in [HHK2001], in which communication of data occurs only at pre-defined periodic time instances: Reading data only at the beginning of the period and writing data only at the end of the period. The cost of an additional latency delay is traded for data consistency and reduced jitter. This concept has also recently been applied to automotive applications[NSP2018].
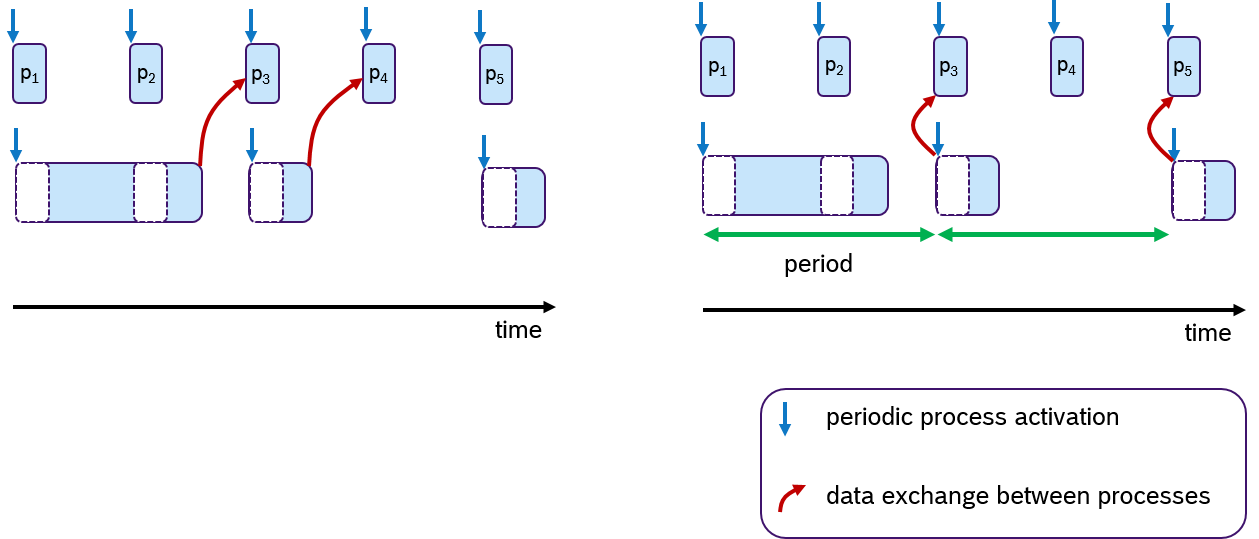
An Example of the LET concept is shown in Figure 8. Assume that two processes are communicating data via one global variable. The timepoint when this data is written is at the end of the processing time. In the default case (left side), the process p3 and p4 receive the update. At the right side of Figure 8, the same scenario is shown with LET semantics. Here, the data is communicated only at period boundaries. In this case, the lower process communicates at the end of the period, so that always process p3 and p5 receive the new data.
Concept: - periodic execution of processes - assignment of fixed priorities to processes - preemptive scheduling of processes - co-operative scheduling of tasks within a process (sequential execution) - data synchronization with LET-semantics
While periodic activation is possible in ROS 2 by using timers, preemptive scheduling is supported by the operating system and assigning priorities on the granularity of threads/processes that correspond to the ROS nodes; it is not possible to sequentially execute callbacks, which have no data-dependency. Furthermore data is read from the DDS queue just before the callback is executed and data is written sometime during the time the application is executed. While the spin_period function of the rclcpp Executor allows to check for data at a fixed period and executing those callbacks for which data is available, however, with this spin-function does not execute all callbacks irrespective wheter data is available or not. So spin_period is not helpful to periodically execute a number of callbacks (aka tasks within a process). So we need a mechanism that triggers the execution of multiple callbacks (aka tasks) based on a timer. Data transmission is achieved via DDS which does not allow to implement a LET-semantics. To summarize, we derive the following requirements.
Derived requirements: - trigger the execution - sequential processing of callbacks - data synchronization with LET semantics
rclc Executor
The rclc Executor is a ROS 2 Executor based on the rcl-layer in C programming language. As discussed above, the default rclcpp Executor is not suitable to implement real-time applications because of three main reasons: timers are preferred over all other handles, no priorization of callback execution and the round-robin to completion execution of callbacks. On the other hand, several processing patterns have been developed as best practices to achieve non-functional requirements, such as bounded end-to-end latencies, low jitter of response times of cause-effect chains, deterministic processing and short response times even in overload situations. These processing patterns are difficult to implement with the concepts availabe in the default ROS 2 Executor, therefore we have developed a flexible Executor: the rclc Executor.
Features
The rclc Executor is feature-complete, i.e. it supports all event types as the default ROS 2 Executor, which are: - subscriptions - timers - services - clients - guard conditions - actions - lifecycle
The flexible rclc Executor provides on top the following new features: - triggered execution - user-defined sequential execution - multi-threading and scheduling configuration (WIP) - LET-semantics for data synchronization of periodic process scheduling
First, a trigger condition allows to define when the processing of a callback shall start. This is useful to implement sense-plan-act control loops or more complex processing structures with directed acyclic graphs. Second, a user can specify the processing order in which these callbacks will be executed. With this feature, the pattern of sensor fusion with multiple rates, in which data is requested from a sensor based on the arrival of some other sensor, can be easily implemented. Third, the assignment of scheduling parameters (e.g., priorities) of the underlying operating system. With this feature, prioritized processing can be implemented. Finally, for periodic applications, the LET Semantics has been implemented to support data consistency for periodic process scheduling. These features are now described in more detail.
Sequential execution
- At configuration, the user defines the order of handles.
- At configuration, the user defines whether the handle shall be called only when new data is available (ON_NEW_DATA) or whether the callback shall always be called (ALWAYS).
- At runtime, all handles are processed in the user-defined order
- if the configuration of handle is ON_NEW_DATA, then the corresponding callback is only called if new data is available
- if the configuration of the handle is ALWAYS, then the corresponding callback is always. If no data is available, then the callback is called with no data (e.g. NULL pointer).
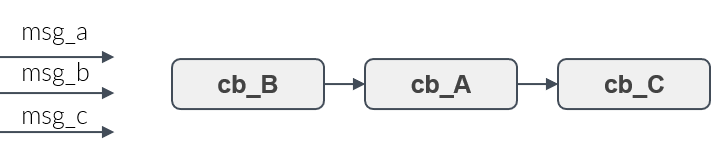
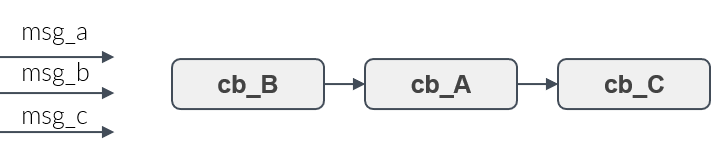
Figure 9 shows three callbacks, A, B and C. Assume, they shall be executed in the order B,A,C. Then the user adds the callbacks to the rclc Executor in this order. Whenever new messages have arrived then the callbacks for which a new message is availabe will be always executed in the user-defined processing order.
Trigger condition
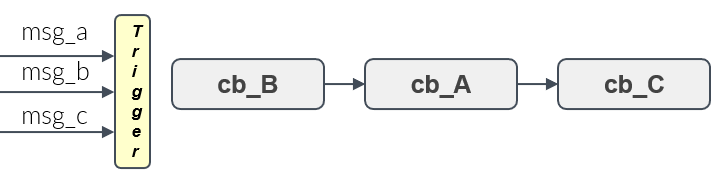
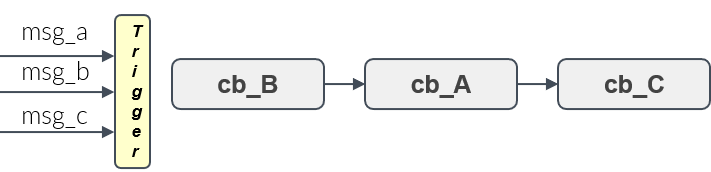
- Given a set of handles, a trigger condition, which is based on the availability of input data of these handles, decides when the processing of all callbacks starts. This is shown in Figure 10.
- Available options:
- ALL operation: fires when input data is available for all handles
- ANY operation: fires when input data is available for at least one handle (OR semantics)
- ONE: fires when input data for a user-specified handle is available
- User-defined function: user can implement custom logic
Figure 11 shows an example of the ALL semantics. Only if all messages msg_A, msg_B, msg_C were received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order.
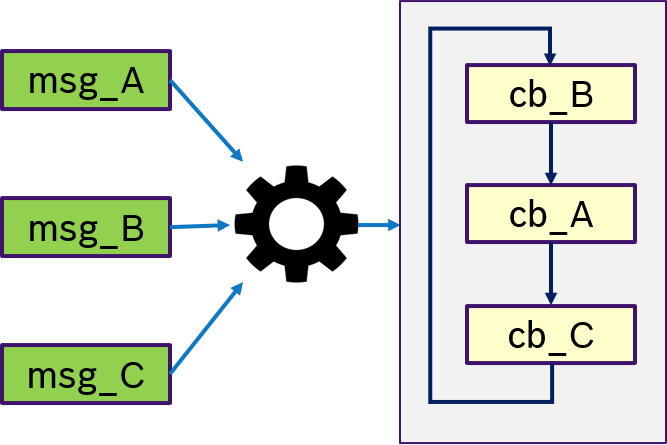
Figure 12 shows an example of the ANY semantics. Thas is, if any messages msg_A, msg_B, msg_C was received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order. This is equivalent to OR semantics.
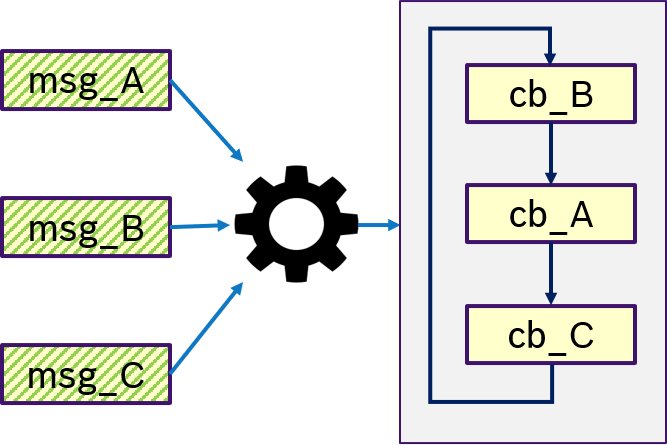
Figure 13 shows an example of the ONE semantics. Thas is, only if message msg_B was received, the trigger condition is fullfilled and (potentially all) callbacks are processed in a user-defined order.
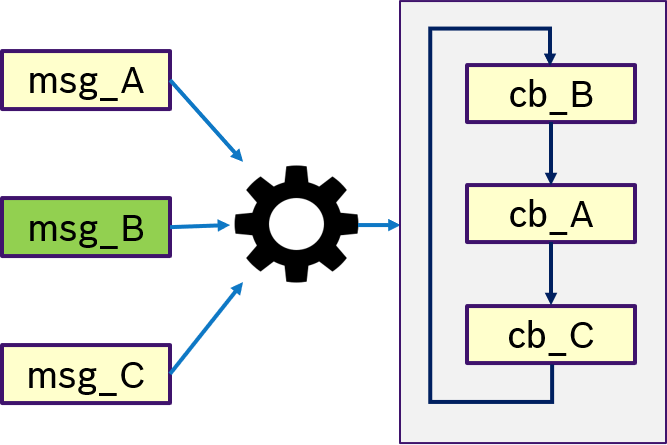
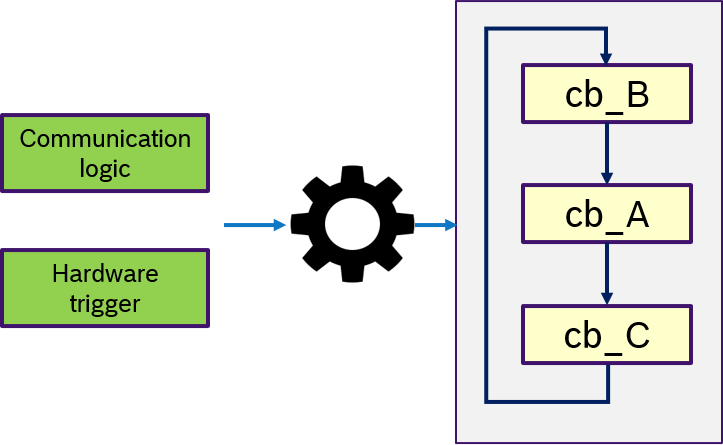
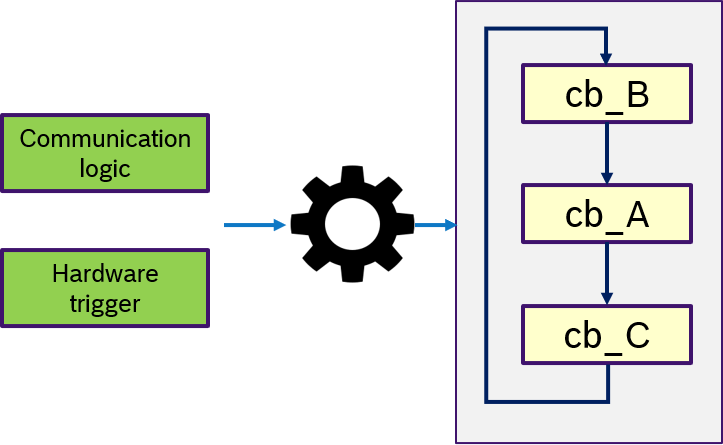
Figure 14 describes the custom semantics. A custom trigger condition with could be a more complex logic of multiple messages, can be passed to the executor. This might also include hardware triggers, like interrupts.
LET-Semantics
- Assumption: time-triggered system, the executor is activated periodically
- When the trigger fires, reads all input data and makes a local copy
- Processes all callbacks in sequential order
- Write output data at the end of the executor's period (Note: this is not implemented yet)
Additionally we have implemented the current rclcpp Executor semantics ("RCLCPP"): - waiting for new data for all handles (rcl_wait) - using trigger condition ANY - if trigger fires, start processing handles in pre-defined sequential order - request from DDS-queue the new data just before the handle is executed (rcl_take)
The selection of the Executor semantics is optional. The default semantics is "RCLCPP".
Multi-threading and scheduling configuration
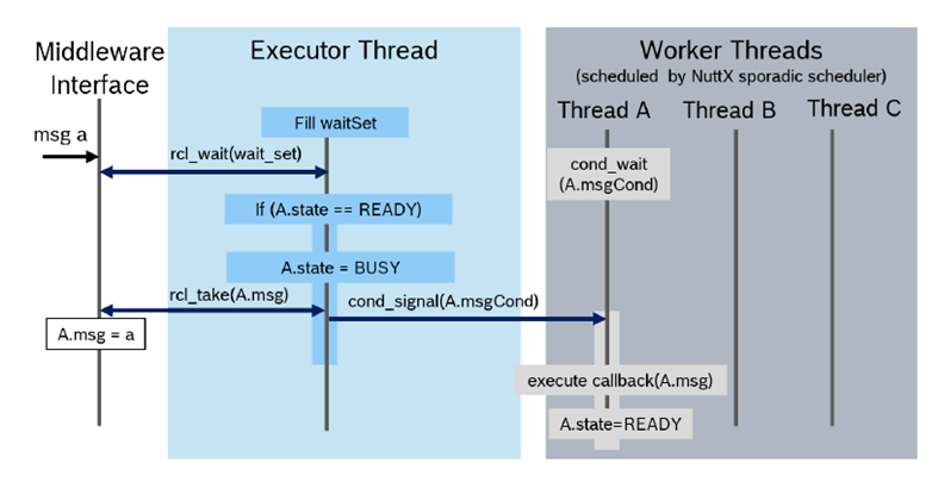
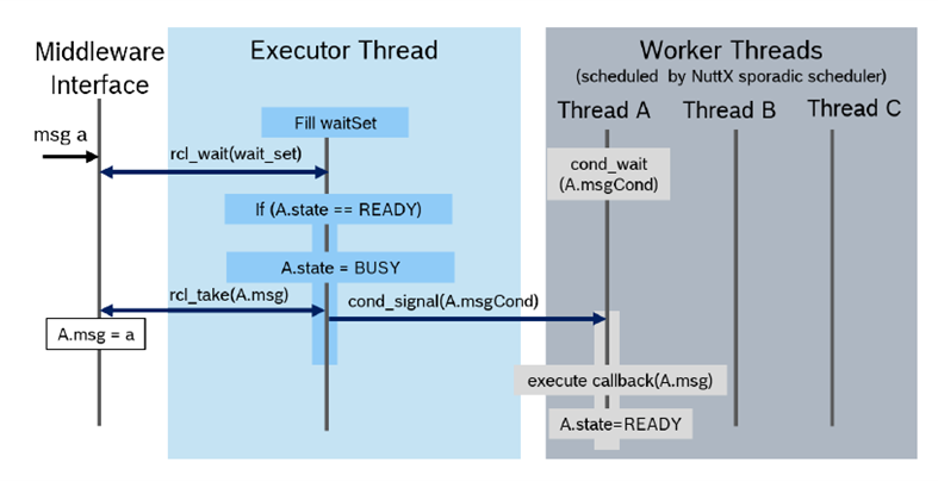
The rclc Executor has been extended for multi-threading. It supports the assignment of scheduling policies, like priorities or more advanced scheduling algorithms as reservation-based scheduling, to subscription callbacks. [Pull Request, Pre-print SLD2021]. The overall architecture is shown in Figure 15. One Executor thread is responsible for checking for new data from the DDS queue. For every callback, a thread is spawned with the dedicted scheduling policy provided by the operating system. The Executor then dispatches new data of a subscription to it's corresponding callback function, which is then executed in its own thread by operating system.
Executor API
The API of the rclc Executor can be divided in two phases: Configuration and Running.
Configuration phase
During the configuration phase, the user shall define: - the total number of callbacks - the sequence of the callbacks - trigger condition (optional, default: ANY) - data communcation semantics (optional, default ROS2)
As the Executor is intended for embedded controllers, dynamic memory management is crucial. Therefore at initialization of the rclc Executor, the user defines the total number of callbacks. The necessary dynamic memory will be allocated only in this phase and no more memory in the running phase. This makes this Executor static in the sense, that during runtime no additional callbacks can be added.
Also in the XRCE-DDS middleware the maximum number of handles need to be configured. See Memory Management Tutorial for the defaults and configuration of the colcon.meta configuration file. To make sure that the changes were applied, you can check the defined values in the following library include file: build/rmw_microxrcedds/include/rmw_microxrcedds_c/config.h.
Then, the user adds handles and the corresponding callbacks (e.g. for subscriptions and timers) to the Executor. The order in which this takes place, defines later the sequential processing order during runtime.
For each handle the user can specify, if the callback shall be executed only if new data is available (ON_NEW_DATA) or if the callback shall always be executed (ALWAYS). The second option is useful when the callback is expected to be called at a fixed rate.
The trigger condition defines when the processing of these callbacks shall start. For convenience some default conditions have been defined:
- trigger_any(default) : start executing if any callback has new data
- trigger_all : start executing if all callbacks have new data
- trigger_one(&data) : start executing if data has been received
- user_defined_function: the user can also define its own function with more complex logic
With 'trigger_any' being the default, the current semantics of the rclcpp Executor is selected.
The data communication semantics can be - ROS2 (default) - LET
To be compatible with ROS2 rclcpp Executor, the existing rclcpp semantics is implemented as 'ROS2'. That is, with the spin-function the DDS-queue is constantly monitored for new data (rcl_wait). If new data becomes available, then is fetched from DDS (rcl_take) immediately before the callback is executed. All callbacks are processed in the user-defined order, this is the only difference to the rclcpp Executor, in which no order can be specified.
Secondly, the LET semantics is implemented such that at the beginning of processing all available data is fetched (rcl_take) and buffered and then the callbacks are processed in the pre-defined operating on the buffered copy.
Running phase
As the main functionality, the Executor has a spin-function which constantly checks for new data at the DDS-queue, like the rclcpp Executor in ROS2. If the trigger condition is satisfied then all available data from the DDS queue is processed according to the specified semantics (ROS or LET) in the user-defined sequential order. After all callbacks have been processed the DDS is checked for new data again.
Available spin functions are
- spin_some - spin one time
- spin_period - spin with a period
- spin - spin indefinitly
Examples
We provide the relevant code snippets how to setup the rclc Executor for the processing patterns as described above.
Sense-plan-act pipeline in robotics example
In this example we want to realise a sense-plan-act pipeline in a single thread. The trigger condition is demonstrated by activating
the sense-phase when both data for the Laser and IMU are available. Three executors are necessary exe_sense, exe_plan and exe_act. The two sensor acquisition callbacks sense_Laser and sense_IMU are registered in the Executor exe_sense.
The trigger condition ALL is responsible to activate the sense-phase only when all data for these two callbacks are available. Finally all three Executors are spinning using a while-loop and the spin_some function.
The definitions of callbacks are omitted.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act;
rcle_let_executor_t exe_sense, exe_plan, exe_act;
// initialize executors
rclc_executor_init(&exe_sense, &context, 2, ...);
rclc_executor_init(&exe_plan, &context, 1, ...);
rclc_executor_init(&exe_act, &context, 1, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb1, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb2, ON_NEW_DATA);
rclc_let_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// executor for plan-phase
rclc_executor_add_subscription(&exe_plan, &plan, &my_sub_cb3, ON_NEW_DATA);
// executor for act-phase
rclc_executor_add_subscription(&exe_act, &act, &my_sub_cb4, ON_NEW_DATA);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_sense);
rclc_executor_spin_some(&exe_plan);
rclc_executor_spin_some(&exe_act);
}
Synchronization of multiple rates example
The sensor fusion synchronizing the multiple rates with a trigger is shown below.
...
rcl_subscription_t aggr_IMU, sense_Laser, sense_IMU;
rcle_let_executor_t exe_aggr, exe_sense;
// initialize executors
rclc_executor_init(&exe_aggr, &context, 1, ...);
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for aggregate IMU data
rclc_executor_add_subscription(&exe_aggr, &aggr_IMU, &my_sub_cb1, ON_NEW_DATA);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb3, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_aggr);
rclc_executor_spin_some(&exe_sense);
}
The setup for the sensor fusion using sequential execution is shown below.
Note that the sequetial order is sense_IMU, which will request the aggregated IMU message, and then sense_Laser
while the trigger will fire, when a laser message is received.
...
rcl_subscription_t sense_Laser, sense_IMU;
rcle_let_executor_t exe_sense;
// initialize executor
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe_sense);
High priority processing path example
This example shows the sequential processing order to execute the obstacle avoidance obst_avoid
after the callbacks of the sense-phase and before the callback of the planning phase plan.
The control loop is started when a laser message is received. Then an aggregated IMU message is requested,
like in the example above. Then all the other callbacks are always executed. This assumes that these callbacks
communicate via a global data structure. Race conditions cannot occur, because the callbacks
run all in one thread.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act, obst_avoid;
rcle_let_executor_t exe;
// initialize executors
rclc_executor_init(&exe, &context, 5, ...);
// define processing order
rclc_executor_add_subscription(&exe, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe, &obst_avoid, &my_sub_cb3, ALWAYS);
rclc_executor_add_subscription(&exe, &plan, &my_sub_cb4, ALWAYS);
rclc_executor_add_subscription(&exe, &act, &my_sub_cb5, ALWAYS);
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe);
Real-time embedded applications example
With seqential execution the co-operative scheduling of tasks within a process can be modeled. The trigger condition is used to periodically activate the process which will then execute all callbacks in a pre-defined order. Data will be communicated using the LET-semantics. Every Executor is executed in its own tread, to which an appropriate priority can be assigned.
In the following example, the Executor is setup with 4 handles. We assume a process has three subscriptions sub1, sub2, sub3. The sequential processing order is given by the order as they are added to the Executor. A timer timer defines the period. The trigger_one with the paramter timer is used, so that whenever the timer is ready, all callbacks are processed. Finally the data communication semantics LET is defined.
#include "rcl_executor/let_executor.h"
// define subscription callback
void my_sub_cb1(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb2(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb3(const void * msgin)
{
// ...
}
// define timer callback
void my_timer_cb(rcl_timer_t * timer, int64_t last_call_time)
{
// ...
}
// necessary ROS 2 objects
rcl_context_t context;
rcl_node_t node;
rcl_subscription_t sub1, sub2, sub3;
rcl_timer_t timer;
rcle_let_executor_t exe;
// define ROS context
context = rcl_get_zero_initialized_context();
// initialize ROS node
rcl_node_init(&node, &context,...);
// create subscriptions
rcl_subscription_init(&sub1, &node, ...);
rcl_subscription_init(&sub2, &node, ...);
rcl_subscription_init(&sub3, &node, ...);
// create a timer
rcl_timer_init(&timer, &my_timer_cb, ... );
// initialize executor with four handles
rclc_executor_init(&exe, &context, 4, ...);
// define static execution order of handles
rclc_executor_add_subscription(&exe, &sub1, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sub2, &my_sub_cb2, ALWAYS);
rclc_executor_add_subscription(&exe, &sub3, &my_sub_cb3, ALWAYS);
rclc_executor_add_timer(&exe, &timer);
// trigger when handle 'timer' is ready
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &timer);
// select LET-semantics
rclc_executor_data_comm_semantics(&exe, LET);
// spin forever
rclc_executor_spin(&exe);
ROS 2 Executor Workshop Reference System
The rclc Executor has been presented at the workshop 'ROS 2 Executor: How to make it efficient, real-time and deterministic?' at ROS World 2021 (i.e. the online version of ROSCon)[S2021]. A Reference System for testing and benchmarking ROS Executors has been developed for this workshop. The application of the rclc Executor on the reference system with the trigger condition can be found in the rclc-executor branch of the Reference System.
The slides can be downloaded here. All information and the videos and slides of the other talks of the workshop can be found at www.apex.ai/roscon-21.
Future work
- Full LET semantics (writing data at the end of the period)
- one publisher that periodically publishes
- if Executors are running in multiple threads, publishing needs to be atomic
- Multi-threaded executor with assignment of scheduling policies of unerlying operating system. [Pull Request, pre-print SLD2021].
Download
The rclc Executor can be downloaded from the ros2/rclc repository. It is available for the ROS 2 versions Foxy, Galactic and Rolling. The repository provides several packages including the rclc Executor and an rclc_examples package with several application examples.
Callback-group-level Executor
The Callback-group-level Executor was an early prototype for a refined rclcpp Executor API developed in micro-ROS. It has been derived from the default rclcpp Executor and addresses some of the aforementioned deficits. Most important, it was used to validate that the underlying layers (rcl, rmw, rmw_adapter, DDS) allow for multiple Executor instances without any negative interferences.
As the default rclcpp Executor works at a node-level granularity – which is a limitation given that a node may issue different callbacks needing different real-time guarantees - we decided to refine the API for more fine-grained control over the scheduling of callbacks on the granularity of callback groups using. We leverage the callback-group concept existing in rclcpp by introducing real-time profiles such as RT-CRITICAL and BEST-EFFORT in the callback-group API (i.e. rclcpp/callback_group.hpp). Each callback needing specific real-time guarantees, when created, may therefore be associated with a dedicated callback group. With this in place, we enhanced the Executor and depending classes (e.g., for memory allocation) to operate at a finer callback-group granularity. This allows a single node to have callbacks with different real-time profiles assigned to different Executor instances - within one process.
Thus, an Executor instance can be dedicated to specific callback group(s) and the Executor’s thread(s) can be prioritized according to the real-time requirements of these groups. For example, all time-critical callbacks are handled by an "RT-CRITICAL" Executor instance running at the highest scheduler priority.
The following Figure illustrates this approach with two nodes served by three Callback-group-level Executors in one process:
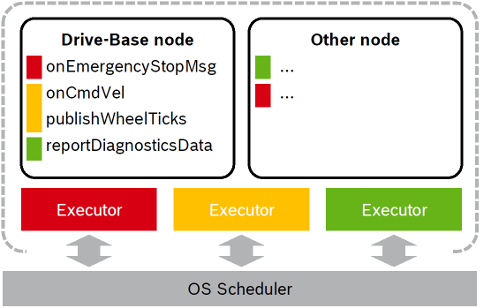
The different callbacks of the Drive-Base node are distributed to different Executors (visualized by the color red, yellow and green). For example the onCmdVel and publishWheelTicks callback are scheduled by the same Executor (yellow). Callbacks from different nodes can be serviced by the same Executor.
API Changes
In this section, we describe the necessary changes to the Executor API: * include/rclcpp/callback_group.hpp:
* Introduced an enum to distinguish up to three real-time classes (requirements) per node (RealTimeCritical, SoftRealTime, BestEffort)
* Changed association with Executor instance from nodes to callback groups.
-
- Added functions to add and remove individual callback groups in addition to whole nodes.
- Replaced private vector of nodes with a map from callback groups to nodes.
-
include/rclcpp/memory_strategy.hpp
- Changed all functions that expect a vector of nodes to the just mentioned map.
-
include/rclcpp/node.hpp and include/rclcpp/node_interfaces/node_base.hpp
- Extended arguments of create_callback_group function for the real-time class.
- Removed the get_associated_with_executor_atomic function.
The callback-group-level executor has been merged into ROS 2 rclcpp in pull request 1218.
Test Bench
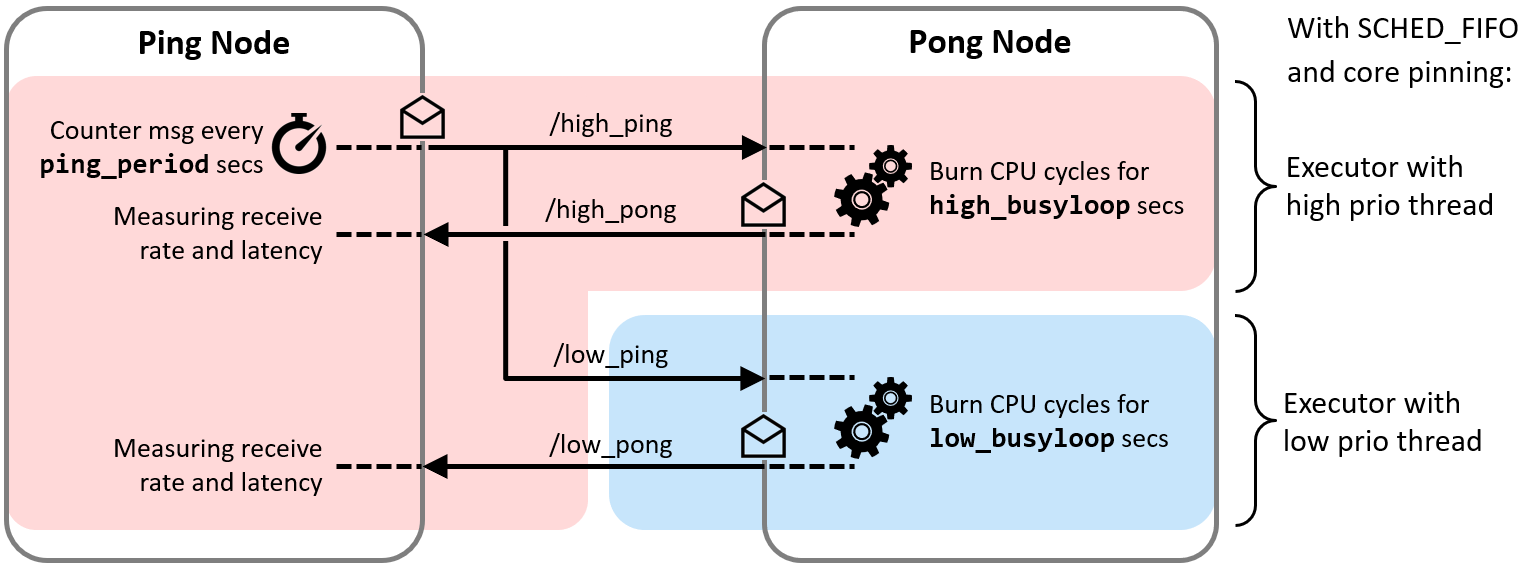
As a proof of concept, we implemented a small test bench in the present package cbg-executor_ping-pong_cpp. The test bench comprises a Ping node and a Pong node which exchange real-time and best-effort messages simultaneously with each other. Each class of messages is handled with a dedicated Executor, as illustrated in the following Figure.
With the test bench, we validated the functioning of the approach.
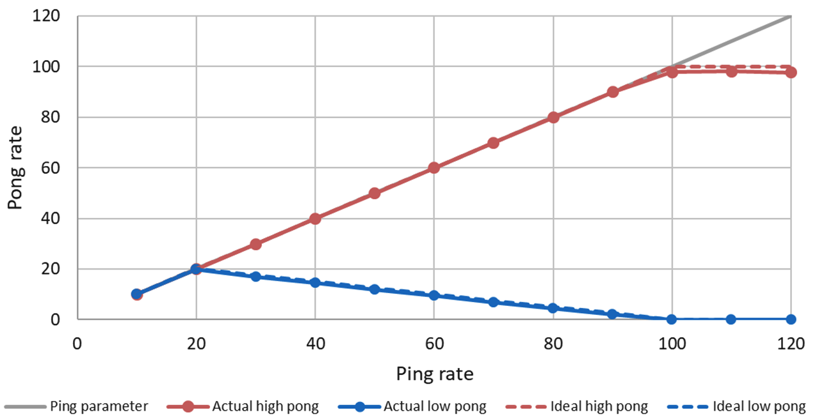
In this example, the callback for the high priority task (red line) consumes 10ms and the low priority task (blue line) 40ms in the Pong Node. With a ping rate of 20 Hz, the CPU saturates (10ms*20+40ms*20=1000ms). With higher frequencies the high priorty task can continue to send its pong message, while the low priority pong task degrades. With a frequency of 100Hz the high priority task requires 100% CPU utilization. With higher ping rates it keeps sending pong messages with 100Hz, while the low priority task does not get any CPU ressources any more and cannot send any messages.
The test bench is provided in the cbg_executor_demo.
Related Work
In this section, we provide an overview to related approaches and link to the corresponding APIs.
Fawkes Framework
Fawkes is a robotic software framework, which supports synchronization points for sense-plan-act like execution. It has been developed by RWTH Aachen since 2006. Source code is available at github.com/fawkesrobotics.
Synchronization
Fawkes provides developers different synchronization points, which are very useful for defining an execution order of a typical sense-plan-act application. These ten synchronization points (wake-up hooks) are the following (cf. libs/aspect/blocked_timing.h):
- WAKEUP_HOOK_PRE_LOOP
- WAKEUP_HOOK_SENSOR_ACQUIRE
- WAKEUP_HOOK_SENSOR_PREPARE
- WAKEUP_HOOK_SENSOR_PROCESS
- WAKEUP_HOOK_WORLDSTATE
- WAKEUP_HOOK_THINK
- WAKEUP_HOOK_SKILL
- WAKEUP_HOOK_ACT
- WAKEUP_HOOK_ACT_EXEC
- WAKEUP_HOOK_POST_LOOP
Configuration at compile time
At compile time, a desired synchronization point is defined as a constructor parameter for a module. For example, assuming that mapLaserGenThread shall be executed in SENSOR_ACQUIRE, the constructor is implemented as:
MapLaserGenThread::MapLaserGenThread()
:: Thread("MapLaserGenThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_ACQUIRE),
TransformAspect(TransformAspect::BOTH_DEFER_PUBLISHER, "Map Laser Odometry")
Similarly, if NaoQiButtonThread shall be executed in the SENSOR_PROCESS hook, the constructor is:
NaoQiButtonThread::NaoQiButtonThread()
:: Thread("NaoQiButtonThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_PROCESS)
Runtime execution
At runtime, the Executor iterates through the list of synchronization points and executes all registered threads until completion. Then, the threads of the next synchronization point are called.
A module (thread) can be configured independent of these sense-plan-act synchronization points. This has the effect, that this thread is executed in parallel to this chain.
The high level overview of the Fawkes framework is shown in the next figure. At compile-time the configuration of the sense-plan act wakeup hook is done (upper part), while at run-time the scheduler iterates through this list of wakeup-hooks (lower part):
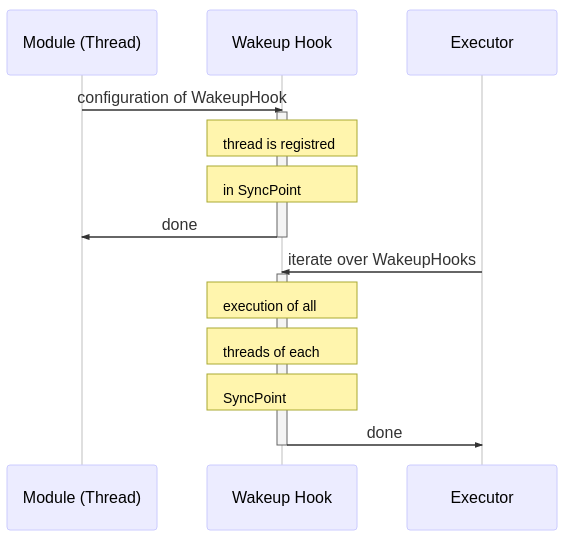
Hence, at run-time, the hooks are executed as a fixed static schedule without preemption. Multiple threads registered in the same hook are executed in parallel.
Orthogonal to the sequential execution of sense-plan-act like applications, it is possible to define further constraints on the execution order by means of a Barrier. A barrier defines a number of threads, which need to have finished before the thread can start, which owns the barrier.
These concepts are implemented by the following main classes:
-
Wakeup hook by
SyncPointandSyncPointManager, which manages a list of synchronization points. -
Executor by the class
FawkesMainThread, which is the scheduler, responsible for calling the user threads. -
ThreadManager, which is derived fromBlockedTimingExecutor, provides the necessary API to add and remove threads to wakeup hooks as well as for sequential execution of the wakeup-hooks. -
Barrieris an object similar tocondition_variablein C++.
Discussion
All threads are executed with the same priority. If multiple sense-plan-act chains shall be executed with different priorities, e.g. to prefer execution of emergency-stop over normal operation, then this framework reaches its limits.
Also, different execution frequencies cannot be modeled by a single instance of this sense-plan-act chain. However, in robotics the fastest sensor will drive the chain and all other hooks are executed with the same frequency.
The option to execute threads independent of the predefined wakeup-hooks is very useful, e.g. for diagnostics. The concept of the Barrier is useful for satisfying functional dependencies which need to be considered in the execution order.
References
[S2021] J. Staschulat, "Micro-ROS: The rclc Executor", in Workshop ROS 2 Executor: How to make it efficient, real-time and deterministic? at ROS World, Oct. 2021, [slides] [Video]
[SLD2021] J. Staschulat, R. Lange and D. N. Dasari, "Budget-based real-time Executor for Micro-ROS", arXiv Pre-Print, May 2021. [paper]
[L2020] Ralph Lange: Advanced Execution Management with ROS 2, ROS-Industrial Conference, Dec 2020 [Slides]
[SLL2020] J. Staschulat, I. Lütkebohle and R. Lange, "The rclc Executor: Domain-specific deterministic scheduling mechanisms for ROS applications on microcontrollers: work-in-progress," 2020 International Conference on Embedded Software (EMSOFT), Singapore, Singapore, 2020, pp. 18-19. [Paper] [Video]
[CB2019] D. Casini, T. Blaß, I. Lütkebohle, B. Brandenburg: Response-Time Analysis of ROS 2 Processing Chains under Reservation-Based Scheduling, in Euromicro-Conference on Real-Time Systems 2019. [Paper] [slides]
[L2018] Ralph Lange: Callback-group-level Executor for ROS 2. Lightning talk at ROSCon 2018. Madrid, Spain. Sep 2018. [Slides] [Video]
[EK2018] R. Ernst, S. Kuntz, S. Quinton, M. Simons: The Logical Execution Time Paradigm: New Perspectives for Multicore Systems, February 25-28 2018 (Dagstuhl Seminar 18092). [Paper]
[NSP2018] A. Naderlinger, S. Resmerita, and W. Pree: LET for Legacy and Model-based Applications, Proceedings of The Logical Execution Time Paradigm: New Perspectives for Multicore Systems (Dagstuhl Seminar 18092), Wadern, Germany, February 2018.
[BP2017] A. Biondi, P. Pazzaglia, A. Balsini, M. D. Natale: Logical Execution Time Implementation and Memory Optimization Issues in AUTOSAR Applications for Multicores, International Worshop on Analysis Tools and Methodologies for Embedded and Real-Time Systems (WATERS2017), Dubrovnik, Croatia.[Paper]
[KZH2015] S. Kramer, D. Ziegenbein, and A. Hamann: Real World Automotive Benchmarks For Free, International Workshop on Analysis Tools and Methodologies for Embedded adn Real-Time Sysems (WATERS), 2015.
[HHK2001] Henzinger T.A., Horowitz B., Kirsch C.M. (2001) Giotto: A Time-Triggered Language for Embedded Programming. In: Henzinger T.A., Kirsch C.M. (eds) Embedded Software. EMSOFT 2001. Lecture Notes in Computer Science, vol 2211. Springer, Berlin, Heidelberg
[LL1973] Liu, C. L.; Layland, J.:Scheduling algorithms for multiprogramming in a hard real-time environment, Journal of the ACM, 20 (1): 46–61, 1973.
Changelog for package rclc
4.0.2 (2023-03-22)
- Drop build dependency on std_msgs (backport #314) (#315)
- Updated
and (#318) (#320) - Removed build status for Galactic in README (EOL November 2022) (#321) (#322)
- Update documentation about number_of_handles (#326) (#327)
4.0.1 (2022-07-20)
- updated documentation bloom build status table (#291) (#292)
- updated os-version to ubuntu-22.04 (#295)
- [rolling] updated ros-tooling versions (backport #289) (#297)
- improved doxygen-generated API documentation (#301) (#302)
4.0.0 (2022-04-28)
- updated version for Humble release
3.0.8 (2022-04-14)
- Remove duplicate typedefs. (#249)
- Add rmw dependencies due to EventsExecutor PR in rcl (#255)
- Fix action client & server deallocation (#257)
- updated documentation: build status for Rolling (#266)
- Update action client goal callback signature (#282)
- Upgrade parameters (#274)
3.0.7 (2022-02-17)
- Fix enum naming for avoid collision (#242)
- Added dependency for package performance-test-fixture (#245)
3.0.6 (2022-01-25)
- executor ignore canceled timers (#220)
- uddated documentation README.md (#229)
- resolved error in unit test see issue #230 (#231)
- Add thread dependency to examples (Rolling) (#237) (resolves in this package only cpplint errors)
3.0.5 (2021-11-23)
- Fix data_available reset for timer (backport #215) (#217)
3.0.4 (2021-11-17)
- Ignoring unsuccessful SERVICE_TAKE (#175)
- Add rclc_parameter Quality Declaration (#144)
- use-ros2-testing (#185)
- Fix: printf in executor spin (#195)
- Fix init options handling (#202) (#205)
- Remove init options from support (#203)
- RCLC Actions Implementation (#170)
- Add rcl_action as build export dependency (#211)
3.0.3 (2021-07-28)
- Checking for valid ROS context in spin_some
- Refactoring executor (removing callback_type)
- Fixing codecov config
3.0.2 (2021-07-26)
- Updated codecov to ignore test folders
- Updated bloom release status table
3.0.1 (2021-07-17)
- Added rclc_parameter package
- Added quality of service entity creation API
- Added executor prepare API
- Added support for removing subscription from executor
- Added support for subscription with context
- Added quality declaration statement
- Updated compatability function for sleep
- Removed duplicate NOTICE files
2.0.0 (2021-04-23)
- Added codecov support
- New API of rcl_lifecycle in Rolling required major version bump
1.0.1 (2021-03-29)
- Windows port
- Compatibility sleep function (Windows, POSIX-OS)
- Fixed RCL lifecycle API change for Rolling
1.0.0 (2021-03-04)
- Service callbacks with context
- Fixed minor issues unit tests
- Upgraded setup_ros action (ci jobs)
- Removed Eloquent from ci jobs
0.1.7 (2021-01-20)
- Corrected corrupted changelog
0.1.6 (2021-01-20)
- Fixed issues due to Github Action timing delays on cloud build
- Fixed missing package dependency in Github Action for Eloquent
0.1.5 (2020-12-11)
- Added support for services,clients and guard_conditions to rclc executor
- Added table for bloom release status in README file
0.1.4 (2020-11-25)
- Fixed error in bloom release
0.1.3 (2020-11-23)
- Added rclc_lifecycle package
- Change maintainer information
- Minor fixes, updated unit tests
0.1.2 (2020-05-19)
- Fixed compiler errors for bloom release
0.1.1 (2020-05-14)
- Initial release
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Launch files
Messages
Services
Plugins
Recent questions tagged rclc at Robotics Stack Exchange
|
|
rclc package from rclc reporclc rclc_examples rclc_lifecycle rclc_parameter |
|
|
Package Summary
| Tags | No category tags. |
| Version | 5.0.1 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/rclc.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2023-12-14 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Jan Staschulat
- Pablo Garrido
Authors
- Jan Staschulat
- William Woodall
The rclc package
Table of contents
Introduction
Predictable execution under given real-time constraints is a crucial requirement for many robotic applications. While the service-based paradigm of ROS allows a fast integration of many different functionalities, it does not provide sufficient control over the execution management. For example, there are no mechanisms to enforce a certain execution order of callbacks within a node. Also the execution order of multiple nodes is essential for control applications in mobile robotics. Cause-effect-chains comprising of sensor acquisition, evaluation of data and actuation control should be mapped to ROS nodes executed in this order, however there are no explicit mechanisms to enforce it. Furthermore, when data recordings collected in field tests as ROS-bags are re-played, then the results are often surprisingly different due to non-determinism of process scheduling.
Manually setting up a particular execution order of subscriptions and publishing topics as well as defining use-case specific priorities of the corresponding Linux processes is always possible. However, this approach is error-prone, difficult to extend and requires an in-depth knowledge of the deployed ROS 2 packages in the system.
Therefore the goal of the Executor in micro-ROS is to support roboticists with practical and easy-to-use real-time mechanisms which provide solutions for: - Deterministic execution - Real-time guarantees - Integration of real-time and non real-time functionalities on one platform - Specific support for RTOS and microcontrollers
In ROS 1 a network thread is responsible for receiving all messages and putting them into a FIFO queue (in roscpp). That is, all callbacks were called in a FIFO manner, without any execution management. With the introduction of DDS (data distribution service) in ROS 2, the messages are buffered in DDS. In ROS 2, an Executor concept was introduced to support execution management. At the rcl-layer, a wait-set is configured with handles to be received and in a second step, the handles are taken from the DDS-queue. A handle is a generic term defined in rcl-layer for timers, subscriptions, services, clients and guard conditions.
The standard implementation of the ROS 2 Executor for the C++ API (rclcpp) has, however, certain unusual features, like precedence of timers over all other DDS handles, non-preemptive round-robin scheduling for non-timer handles and considering only one input data for each handle (even if multiple could be available). These features have the consequence, that in certain situations the standard rclcpp Executor is not deterministic and it makes guaranteeing real-time requirements very hard [CB2019]. We have not looked at the ROS 2 Executor implementation for Python Frontend (rclpy) because we consider a micro-controllers platform, on which typically C or C++ appliations will run.
Given the goals for a Real-Time Executor and the limitations of the ROS 2 standard rclcpp Executor, the challenges are: - to develop an adequate and well-defined scheduling mechanisms for the ROS 2 framework and the real-time operating system (RTOS) - to define an easy-to-use interface for ROS developers - to model requirements (like latencies, determinism in subsystems) - mapping of ROS 2 framework and operating system schedulers (semi-automated and optimized mapping is desired as well as generic, well-understood framework mechanisms)
Our approach is to provide a real-time-capable Executor for the rcl+rclc layer (as described in section Introduction to Client Library.) in the C programming language .
As the first step, we propose the rclc Executor for the rcl-layer in C programming language with several new features to support real-time and deterministic execution: It supports 1.) user-defined static sequential execution, 2) conditional execution semantics, 3) multi-threaded execution with scheduling configuration, and 4) logical execution semantics (LET). Sequential execution refers to the runtime behavior, that all callbacks are executed in a pre-defined order independent of the arrival time of messages. Conditional execution is available with a trigger condition which enables typical processing patterns in robotics (which are analyzed in detail in section Analysis of processing patterns. Configuration of scheduling parameters for multi-threaded application accomplishes prioritized execution. The logical execution time concept (LET) provides data synchronization for fixed periodic task scheduling of embedded applications.
Beyond the advanced execution management mechanisms for micro-ROS, we also contributed to improving and extending the Executor concept in rclcpp for standard ROS 2: the callback group-level Executor. It is not a new Executor but rather a refinement of the ROS 2 Executor API allowing to prioritize a group of callbacks which is not possible with the ROS 2 default Executor in its current Galactic release.
Analysis of rclcpp standard Executor
ROS 2 allows to bundle multiple nodes in one operating system process. To coordinate the execution of the callbacks of the nodes of a process, the Executor concept was introduced in rclcpp (and also in rclpy).
The ROS 2 design defines one Executor (instance of rclcpp::executor::Executor) per process, which is typically created either in a custom main function or by the launch system. The Executor coordinates the execution of all callbacks issued by these nodes by checking for available work (timers, services, messages, subscriptions, etc.) from the DDS queue and dispatching it to one or more threads, implemented in SingleThreadedExecutor and MultiThreadedExecutor, respectively.
The dispatching mechanism resembles the ROS 1 spin thread behavior: the Executor looks up the wait sets, which notifies it of any pending callback in the DDS queue. If there are multiple pending callbacks, the ROS 2 Executor executes them in an in the order as they were registered at the Executor.
Architecture
The following diagram depicts the relevant classes of the standard ROS 2 Executor implementation:
Note that an Executor instance maintains weak pointers to the NodeBaseInterfaces of the nodes only. Therefore, nodes can be destroyed safely, without notifying the Executor.
Also, the Executor does not maintain an explicit callback queue, but relies on the queue mechanism of the underlying DDS implementation as illustrated in the following sequence diagram:
The Executor concept, however, does not provide means for prioritization or categorization of the incoming callback calls. Moreover, it does not leverage the real-time characteristics of the underlying operating-system scheduler to have finer control on the order of executions. The overall implication of this behavior is that time-critical callbacks could suffer possible deadline misses and a degraded performance since they are serviced later than non-critical callbacks. Additionally, due to the FIFO mechanism, it is difficult to determine usable bounds on the worst-case latency that each callback execution may incur.
Scheduling Semantics
In a recent paper [CB2019], the rclcpp Executor has been analyzed in detail and a response time analysis of cause-effect chains has been proposed under reservation-based scheduling. The Executor distinguishes four categories of callbacks: timers, which are triggered by system-level timers, subscribers, which are triggered by new messages on a subscribed topic, services, which are triggered by service requests, and clients, which are triggered by responses to service requests. The Executor is responsible for taking messages from the input queues of the DDS layer and executing the corresponding callback. Since it executes callbacks to completion, it is a non-preemptive scheduler, However it does not consider all ready tasks for execution, but only a snapshot, called readySet. This readySet is updated when the Executor is idle and in this step it interacts with the DDS layer updating the set of ready tasks. Then for every type of task, there are dedicated queues (timers, subscriptions, services, clients) which are processed sequentially. The following undesired properties were pointed out:
- Timers have the highest priority. The Executor processes timers always first. This can lead to the intrinsic effect, that in overload situations messages from the DDS queue are not processed.
- Non-preemptive round-robin scheduling of non-timer handles. Messages arriving during the processing of the readySet are not considered until the next update, which depends on the execution time of all remaining callbacks. This leads to priority inversion, as lower-priority callbacks may implicitly block higher-priority callbacks by prolonging the current processing of the readySet.
- Only one message per handle is considered. The readySet contains only one task instance, For example, even if multiple messages of the same topic are available, only one instance is processed until the Executor is idle again and the readySet is updated from the DDS layer. This aggravates priority inversion, as a backlogged callback might have to wait for multiple processing of readySets until it is considered for scheduling. This means that non-timer callback instances might be blocked by multiple instances of the same lower-priority callback.
Due to these findings, the authors present an alternative approach to provide determinism and to apply well-known schedulability analyses to a ROS 2 systems. A response time analysis is described under reservation-based scheduling.
Analysis of processing patterns
The development of an execution management mechanism for micro-ROS is based on an analysis of processing patterns commonly used in robotics and embedded systems. First, typical processing patterns in mobile robotics are presented which are used to implement deterministic behavior. Then, the processing patterns in the real-time embedded systems are analyzed, in which, as a main difference, the time-triggered paradigm is applied to accomplish real-time behavior.
Sense-plan-act pipeline in robotics
Now we describe common software design patterns which are used in mobile robotics to achieve deterministic behavior. For each design pattern we describe the concept and the derived requirements for a deterministic Executor.
Concept:
A common design paradigm in mobile robotics is a control loop, consisting of several phases: A sensing phase to aquire sensor data, a plan phase for localization and path planning and an actuation-phase to steer the mobile robot. Of course, more phases are possible, here these three phases shall serve as an example. Such a processing pipeline is shown in Figure 1.

Typically multiple sensors are used to perceive the environment. For example an IMU and a laser scanner. The quality of localization algorithms highly depend on how old such sensor data is when it is processed. Ideally the latest data of all sensors should be processed. One way to achive this is to execute first all sensor drivers in the sense-phase and then process all algorithms in the plan-phase.
Currently, such a processing order cannot be defined with the default Executor of rclcpp. One could in principle design a data-driven pipeline, however if e.g. the Laser scan is needed by some other callback in the sense-phase as well as in the plan-phase, the processing order of these subscribers is arbitrary.
For this sense-plan-act pattern, we could define one executor for each phase. The plan-phase would be triggered only when all callbacks in the sense-phase have finished.
Derived requirements: - triggered execution
Synchronization of multiple rates
Concept:
Often multiple sensors are being used to sense the environment for mobile robotics. While an IMU sensor provides data samples at a very high rate (e.g., 500 Hz), laser scans are availabe at a much slower frequency (e.g. 10Hz) determined by the revolution time. Then the challenge is, how to deterministically fuse sensor data with different frequencies. This problem is depicted in Figure 2.
Due to scheduling effects, the callback for evaluating the laser scan might be called just before or just after an IMU data is received. One way to tackle this is to write additional synchronization code inside the application. Obviously, this is a cumbersome and not-portable solution.
An Alternative would be to evalute the IMU sample and the laser scan by synchronizing their frequency. For example by processing always 50 IMU samples with one laser scan. This approach is shown in Figure 3. A pre-processing callback aggregates the IMU samples and sends an aggregated message with 50 samples at 10Hz rate. Now both messages have the same frequency. With a trigger condition, which fires when both messages are available, the sensor fusion algorithm can expect always synchronized input data.
In ROS 2, this is currently not possible to be modeled because of the lack of a trigger concept in the Executors of rclcpp and rclpy. Message filters could be used to synchronize input data based on the timestamp in the header, but this is only available in rclcpp (and not in rcl). Further more, it would be more efficient to have such a trigger concept directly in the Executor.
Another idea would be to activly request for IMU data only when a laser scan is received. This concept is shown in Figure 4. Upon arrival of a laser scan mesage, first, a message with aggregated IMU samples is requested. Then, the laser scan is processed and later the sensor fusion algorithm. An Executor, which would support sequential execution of callbacks, could realize this idea.
Derived requirements: - triggered execution - sequential procesing of callbacks
High-priority processing path
Concept Often a robot has to fullfill several activities at the same time. For example following a path and avoiding obstacles. While path following is a permanent activity, obstacle avoidance is trigged by the environment and should be immediately reacted upon. Therefore one would like to specify priorities to activities. This is depicted in Figure 5:
Assuming a simplified control loop with the activities sense-plan-act, the obstacle avoidance, which might temporarily stop the robot, should be processed before the planning phase. In this example we assume that these activites are processed in one thread.
Derived requirements: - sequential processing of callbacks
Real-time embedded applications
In embedded systems, real-time behavior is approached by using the time-triggered paradigm, which means that the processes are periodically activated. Processes can be assigned priorities to allow pre-emptions. Figure 6 shows an example, in which three processes with fixed periods are shown. The middle and lower process are preempted multiple times depicted with empty dashed boxes.
To each process one or multiple tasks can be assigned, as shown in Figure 7. These tasks are executed sequentially, which is often called cooperative scheduling.
While there are different ways to assign priorities to a given number of processes, the rate-monotonic scheduling assignment, in which processes with a shorter period have a higher priority, has been shown optimal if the processor utilization is less than 69% [LL1973].
In the last decades many different scheduling approaches have been presented, however fixed-periodic preemptive scheduling is still widely used in embedded real-time systems [KZH2015]. This becomes also obvious, when looking at the features of current operating systems. Like Linux, real-time operating systems, such as NuttX, Zephyr, FreeRTOS, QNX etc., support fixed-periodic preemptive scheduling and the assignment of priorities, which makes the time-triggered paradigm the dominant design principle in this domain.
However, data consistency is often an issue when preemptive scheduling is used and if data is being shared across multiple processes via global variables. Due to scheduling effects and varying execution times of processes, writing and reading these variables could occur sometimes sooner or later. This results in an latency jitter of update times (the timepoint at which a variable change becomes visible to other processes). Race conditions can occur when multiple processes access a variable at the same time. So solve this problem, the concept of logical-execution time (LET) was introduced in [HHK2001], in which communication of data occurs only at pre-defined periodic time instances: Reading data only at the beginning of the period and writing data only at the end of the period. The cost of an additional latency delay is traded for data consistency and reduced jitter. This concept has also recently been applied to automotive applications[NSP2018].
An Example of the LET concept is shown in Figure 8. Assume that two processes are communicating data via one global variable. The timepoint when this data is written is at the end of the processing time. In the default case (left side), the process p3 and p4 receive the update. At the right side of Figure 8, the same scenario is shown with LET semantics. Here, the data is communicated only at period boundaries. In this case, the lower process communicates at the end of the period, so that always process p3 and p5 receive the new data.
Concept: - periodic execution of processes - assignment of fixed priorities to processes - preemptive scheduling of processes - co-operative scheduling of tasks within a process (sequential execution) - data synchronization with LET-semantics
While periodic activation is possible in ROS 2 by using timers, preemptive scheduling is supported by the operating system and assigning priorities on the granularity of threads/processes that correspond to the ROS nodes; it is not possible to sequentially execute callbacks, which have no data-dependency. Furthermore data is read from the DDS queue just before the callback is executed and data is written sometime during the time the application is executed. While the spin_period function of the rclcpp Executor allows to check for data at a fixed period and executing those callbacks for which data is available, however, with this spin-function does not execute all callbacks irrespective wheter data is available or not. So spin_period is not helpful to periodically execute a number of callbacks (aka tasks within a process). So we need a mechanism that triggers the execution of multiple callbacks (aka tasks) based on a timer. Data transmission is achieved via DDS which does not allow to implement a LET-semantics. To summarize, we derive the following requirements.
Derived requirements: - trigger the execution - sequential processing of callbacks - data synchronization with LET semantics
rclc Executor
The rclc Executor is a ROS 2 Executor based on the rcl-layer in C programming language. As discussed above, the default rclcpp Executor is not suitable to implement real-time applications because of three main reasons: timers are preferred over all other handles, no priorization of callback execution and the round-robin to completion execution of callbacks. On the other hand, several processing patterns have been developed as best practices to achieve non-functional requirements, such as bounded end-to-end latencies, low jitter of response times of cause-effect chains, deterministic processing and short response times even in overload situations. These processing patterns are difficult to implement with the concepts availabe in the default ROS 2 Executor, therefore we have developed a flexible Executor: the rclc Executor.
Features
The rclc Executor is feature-complete, i.e. it supports all event types as the default ROS 2 Executor, which are: - subscriptions - timers - services - clients - guard conditions - actions - lifecycle
The flexible rclc Executor provides on top the following new features: - triggered execution - user-defined sequential execution - multi-threading and scheduling configuration (WIP) - LET-semantics for data synchronization of periodic process scheduling
First, a trigger condition allows to define when the processing of a callback shall start. This is useful to implement sense-plan-act control loops or more complex processing structures with directed acyclic graphs. Second, a user can specify the processing order in which these callbacks will be executed. With this feature, the pattern of sensor fusion with multiple rates, in which data is requested from a sensor based on the arrival of some other sensor, can be easily implemented. Third, the assignment of scheduling parameters (e.g., priorities) of the underlying operating system. With this feature, prioritized processing can be implemented. Finally, for periodic applications, the LET Semantics has been implemented to support data consistency for periodic process scheduling. These features are now described in more detail.
Sequential execution
- At configuration, the user defines the order of handles.
- At configuration, the user defines whether the handle shall be called only when new data is available (ON_NEW_DATA) or whether the callback shall always be called (ALWAYS).
- At runtime, all handles are processed in the user-defined order
- if the configuration of handle is ON_NEW_DATA, then the corresponding callback is only called if new data is available
- if the configuration of the handle is ALWAYS, then the corresponding callback is always. If no data is available, then the callback is called with no data (e.g. NULL pointer).
Figure 9 shows three callbacks, A, B and C. Assume, they shall be executed in the order B,A,C. Then the user adds the callbacks to the rclc Executor in this order. Whenever new messages have arrived then the callbacks for which a new message is availabe will be always executed in the user-defined processing order.
Trigger condition
- Given a set of handles, a trigger condition, which is based on the availability of input data of these handles, decides when the processing of all callbacks starts. This is shown in Figure 10.
- Available options:
- ALL operation: fires when input data is available for all handles
- ANY operation: fires when input data is available for at least one handle (OR semantics)
- ONE: fires when input data for a user-specified handle is available
- User-defined function: user can implement custom logic
Figure 11 shows an example of the ALL semantics. Only if all messages msg_A, msg_B, msg_C were received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order.
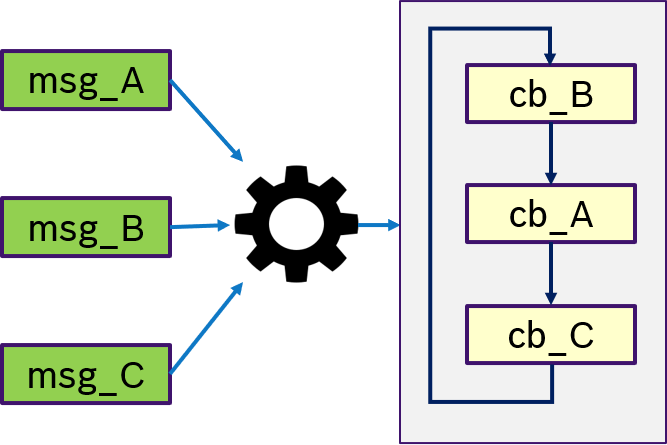
Figure 12 shows an example of the ANY semantics. Thas is, if any messages msg_A, msg_B, msg_C was received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order. This is equivalent to OR semantics.
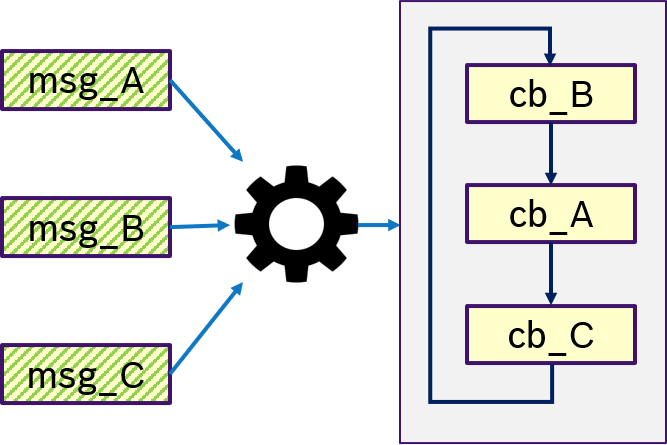
Figure 13 shows an example of the ONE semantics. Thas is, only if message msg_B was received, the trigger condition is fullfilled and (potentially all) callbacks are processed in a user-defined order.
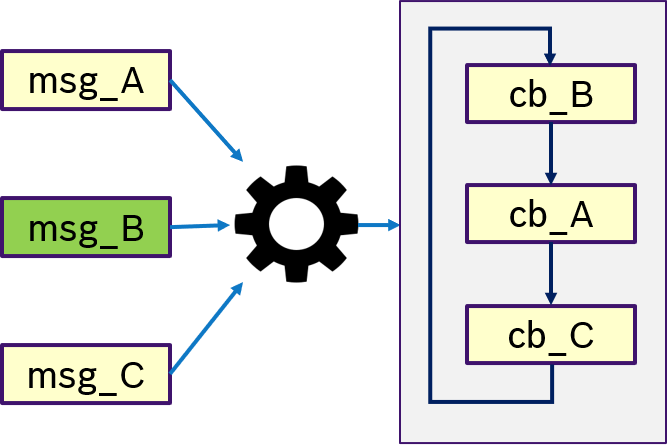
Figure 14 describes the custom semantics. A custom trigger condition with could be a more complex logic of multiple messages, can be passed to the executor. This might also include hardware triggers, like interrupts.
LET-Semantics
- Assumption: time-triggered system, the executor is activated periodically
- When the trigger fires, reads all input data and makes a local copy
- Processes all callbacks in sequential order
- Write output data at the end of the executor's period (Note: this is not implemented yet)
Additionally we have implemented the current rclcpp Executor semantics ("RCLCPP"): - waiting for new data for all handles (rcl_wait) - using trigger condition ANY - if trigger fires, start processing handles in pre-defined sequential order - request from DDS-queue the new data just before the handle is executed (rcl_take)
The selection of the Executor semantics is optional. The default semantics is "RCLCPP".
Multi-threading and scheduling configuration
The rclc Executor has been extended for multi-threading. It supports the assignment of scheduling policies, like priorities or more advanced scheduling algorithms as reservation-based scheduling, to subscription callbacks. [Pull Request, Pre-print SLD2021]. The overall architecture is shown in Figure 15. One Executor thread is responsible for checking for new data from the DDS queue. For every callback, a thread is spawned with the dedicted scheduling policy provided by the operating system. The Executor then dispatches new data of a subscription to it's corresponding callback function, which is then executed in its own thread by operating system.
Executor API
The API of the rclc Executor can be divided in two phases: Configuration and Running.
Configuration phase
During the configuration phase, the user shall define: - the total number of callbacks - the sequence of the callbacks - trigger condition (optional, default: ANY) - data communcation semantics (optional, default ROS2)
As the Executor is intended for embedded controllers, dynamic memory management is crucial. Therefore at initialization of the rclc Executor, the user defines the total number of callbacks. The necessary dynamic memory will be allocated only in this phase and no more memory in the running phase. This makes this Executor static in the sense, that during runtime no additional callbacks can be added.
Also in the XRCE-DDS middleware the maximum number of handles need to be configured. See Memory Management Tutorial for the defaults and configuration of the colcon.meta configuration file. To make sure that the changes were applied, you can check the defined values in the following library include file: build/rmw_microxrcedds/include/rmw_microxrcedds_c/config.h.
Then, the user adds handles and the corresponding callbacks (e.g. for subscriptions and timers) to the Executor. The order in which this takes place, defines later the sequential processing order during runtime.
For each handle the user can specify, if the callback shall be executed only if new data is available (ON_NEW_DATA) or if the callback shall always be executed (ALWAYS). The second option is useful when the callback is expected to be called at a fixed rate.
The trigger condition defines when the processing of these callbacks shall start. For convenience some default conditions have been defined:
- trigger_any(default) : start executing if any callback has new data
- trigger_all : start executing if all callbacks have new data
- trigger_one(&data) : start executing if data has been received
- user_defined_function: the user can also define its own function with more complex logic
With 'trigger_any' being the default, the current semantics of the rclcpp Executor is selected.
The data communication semantics can be - ROS2 (default) - LET
To be compatible with ROS2 rclcpp Executor, the existing rclcpp semantics is implemented as 'ROS2'. That is, with the spin-function the DDS-queue is constantly monitored for new data (rcl_wait). If new data becomes available, then is fetched from DDS (rcl_take) immediately before the callback is executed. All callbacks are processed in the user-defined order, this is the only difference to the rclcpp Executor, in which no order can be specified.
Secondly, the LET semantics is implemented such that at the beginning of processing all available data is fetched (rcl_take) and buffered and then the callbacks are processed in the pre-defined operating on the buffered copy.
Running phase
As the main functionality, the Executor has a spin-function which constantly checks for new data at the DDS-queue, like the rclcpp Executor in ROS2. If the trigger condition is satisfied then all available data from the DDS queue is processed according to the specified semantics (ROS or LET) in the user-defined sequential order. After all callbacks have been processed the DDS is checked for new data again.
Available spin functions are
- spin_some - spin one time
- spin_period - spin with a period
- spin - spin indefinitly
Examples
We provide the relevant code snippets how to setup the rclc Executor for the processing patterns as described above.
Sense-plan-act pipeline in robotics example
In this example we want to realise a sense-plan-act pipeline in a single thread. The trigger condition is demonstrated by activating
the sense-phase when both data for the Laser and IMU are available. Three executors are necessary exe_sense, exe_plan and exe_act. The two sensor acquisition callbacks sense_Laser and sense_IMU are registered in the Executor exe_sense.
The trigger condition ALL is responsible to activate the sense-phase only when all data for these two callbacks are available. Finally all three Executors are spinning using a while-loop and the spin_some function.
The definitions of callbacks are omitted.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act;
rcle_let_executor_t exe_sense, exe_plan, exe_act;
// initialize executors
rclc_executor_init(&exe_sense, &context, 2, ...);
rclc_executor_init(&exe_plan, &context, 1, ...);
rclc_executor_init(&exe_act, &context, 1, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb1, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb2, ON_NEW_DATA);
rclc_let_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// executor for plan-phase
rclc_executor_add_subscription(&exe_plan, &plan, &my_sub_cb3, ON_NEW_DATA);
// executor for act-phase
rclc_executor_add_subscription(&exe_act, &act, &my_sub_cb4, ON_NEW_DATA);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_sense);
rclc_executor_spin_some(&exe_plan);
rclc_executor_spin_some(&exe_act);
}
Synchronization of multiple rates example
The sensor fusion synchronizing the multiple rates with a trigger is shown below.
...
rcl_subscription_t aggr_IMU, sense_Laser, sense_IMU;
rcle_let_executor_t exe_aggr, exe_sense;
// initialize executors
rclc_executor_init(&exe_aggr, &context, 1, ...);
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for aggregate IMU data
rclc_executor_add_subscription(&exe_aggr, &aggr_IMU, &my_sub_cb1, ON_NEW_DATA);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb3, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_aggr);
rclc_executor_spin_some(&exe_sense);
}
The setup for the sensor fusion using sequential execution is shown below.
Note that the sequetial order is sense_IMU, which will request the aggregated IMU message, and then sense_Laser
while the trigger will fire, when a laser message is received.
...
rcl_subscription_t sense_Laser, sense_IMU;
rcle_let_executor_t exe_sense;
// initialize executor
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe_sense);
High priority processing path example
This example shows the sequential processing order to execute the obstacle avoidance obst_avoid
after the callbacks of the sense-phase and before the callback of the planning phase plan.
The control loop is started when a laser message is received. Then an aggregated IMU message is requested,
like in the example above. Then all the other callbacks are always executed. This assumes that these callbacks
communicate via a global data structure. Race conditions cannot occur, because the callbacks
run all in one thread.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act, obst_avoid;
rcle_let_executor_t exe;
// initialize executors
rclc_executor_init(&exe, &context, 5, ...);
// define processing order
rclc_executor_add_subscription(&exe, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe, &obst_avoid, &my_sub_cb3, ALWAYS);
rclc_executor_add_subscription(&exe, &plan, &my_sub_cb4, ALWAYS);
rclc_executor_add_subscription(&exe, &act, &my_sub_cb5, ALWAYS);
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe);
Real-time embedded applications example
With seqential execution the co-operative scheduling of tasks within a process can be modeled. The trigger condition is used to periodically activate the process which will then execute all callbacks in a pre-defined order. Data will be communicated using the LET-semantics. Every Executor is executed in its own tread, to which an appropriate priority can be assigned.
In the following example, the Executor is setup with 4 handles. We assume a process has three subscriptions sub1, sub2, sub3. The sequential processing order is given by the order as they are added to the Executor. A timer timer defines the period. The trigger_one with the paramter timer is used, so that whenever the timer is ready, all callbacks are processed. Finally the data communication semantics LET is defined.
#include "rcl_executor/let_executor.h"
// define subscription callback
void my_sub_cb1(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb2(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb3(const void * msgin)
{
// ...
}
// define timer callback
void my_timer_cb(rcl_timer_t * timer, int64_t last_call_time)
{
// ...
}
// necessary ROS 2 objects
rcl_context_t context;
rcl_node_t node;
rcl_subscription_t sub1, sub2, sub3;
rcl_timer_t timer;
rcle_let_executor_t exe;
// define ROS context
context = rcl_get_zero_initialized_context();
// initialize ROS node
rcl_node_init(&node, &context,...);
// create subscriptions
rcl_subscription_init(&sub1, &node, ...);
rcl_subscription_init(&sub2, &node, ...);
rcl_subscription_init(&sub3, &node, ...);
// create a timer
rcl_timer_init(&timer, &my_timer_cb, ... );
// initialize executor with four handles
rclc_executor_init(&exe, &context, 4, ...);
// define static execution order of handles
rclc_executor_add_subscription(&exe, &sub1, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sub2, &my_sub_cb2, ALWAYS);
rclc_executor_add_subscription(&exe, &sub3, &my_sub_cb3, ALWAYS);
rclc_executor_add_timer(&exe, &timer);
// trigger when handle 'timer' is ready
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &timer);
// select LET-semantics
rclc_executor_data_comm_semantics(&exe, LET);
// spin forever
rclc_executor_spin(&exe);
ROS 2 Executor Workshop Reference System
The rclc Executor has been presented at the workshop 'ROS 2 Executor: How to make it efficient, real-time and deterministic?' at ROS World 2021 (i.e. the online version of ROSCon)[S2021]. A Reference System for testing and benchmarking ROS Executors has been developed for this workshop. The application of the rclc Executor on the reference system with the trigger condition can be found in the rclc-executor branch of the Reference System.
The slides can be downloaded here. All information and the videos and slides of the other talks of the workshop can be found at www.apex.ai/roscon-21.
Future work
- Full LET semantics (writing data at the end of the period)
- one publisher that periodically publishes
- if Executors are running in multiple threads, publishing needs to be atomic
- Multi-threaded executor with assignment of scheduling policies of unerlying operating system. [Pull Request, pre-print SLD2021].
Download
The rclc Executor can be downloaded from the ros2/rclc repository. It is available for the ROS 2 versions Foxy, Galactic and Rolling. The repository provides several packages including the rclc Executor and an rclc_examples package with several application examples.
Callback-group-level Executor
The Callback-group-level Executor was an early prototype for a refined rclcpp Executor API developed in micro-ROS. It has been derived from the default rclcpp Executor and addresses some of the aforementioned deficits. Most important, it was used to validate that the underlying layers (rcl, rmw, rmw_adapter, DDS) allow for multiple Executor instances without any negative interferences.
As the default rclcpp Executor works at a node-level granularity – which is a limitation given that a node may issue different callbacks needing different real-time guarantees - we decided to refine the API for more fine-grained control over the scheduling of callbacks on the granularity of callback groups using. We leverage the callback-group concept existing in rclcpp by introducing real-time profiles such as RT-CRITICAL and BEST-EFFORT in the callback-group API (i.e. rclcpp/callback_group.hpp). Each callback needing specific real-time guarantees, when created, may therefore be associated with a dedicated callback group. With this in place, we enhanced the Executor and depending classes (e.g., for memory allocation) to operate at a finer callback-group granularity. This allows a single node to have callbacks with different real-time profiles assigned to different Executor instances - within one process.
Thus, an Executor instance can be dedicated to specific callback group(s) and the Executor’s thread(s) can be prioritized according to the real-time requirements of these groups. For example, all time-critical callbacks are handled by an "RT-CRITICAL" Executor instance running at the highest scheduler priority.
The following Figure illustrates this approach with two nodes served by three Callback-group-level Executors in one process:
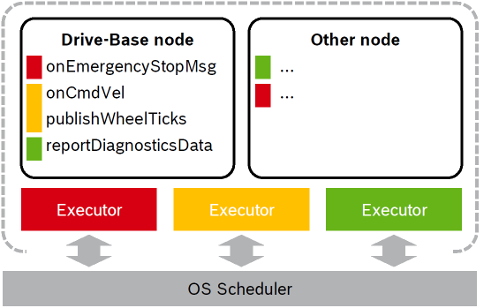
The different callbacks of the Drive-Base node are distributed to different Executors (visualized by the color red, yellow and green). For example the onCmdVel and publishWheelTicks callback are scheduled by the same Executor (yellow). Callbacks from different nodes can be serviced by the same Executor.
API Changes
In this section, we describe the necessary changes to the Executor API: * include/rclcpp/callback_group.hpp:
* Introduced an enum to distinguish up to three real-time classes (requirements) per node (RealTimeCritical, SoftRealTime, BestEffort)
* Changed association with Executor instance from nodes to callback groups.
-
- Added functions to add and remove individual callback groups in addition to whole nodes.
- Replaced private vector of nodes with a map from callback groups to nodes.
-
include/rclcpp/memory_strategy.hpp
- Changed all functions that expect a vector of nodes to the just mentioned map.
-
include/rclcpp/node.hpp and include/rclcpp/node_interfaces/node_base.hpp
- Extended arguments of create_callback_group function for the real-time class.
- Removed the get_associated_with_executor_atomic function.
The callback-group-level executor has been merged into ROS 2 rclcpp in pull request 1218.
Test Bench
As a proof of concept, we implemented a small test bench in the present package cbg-executor_ping-pong_cpp. The test bench comprises a Ping node and a Pong node which exchange real-time and best-effort messages simultaneously with each other. Each class of messages is handled with a dedicated Executor, as illustrated in the following Figure.
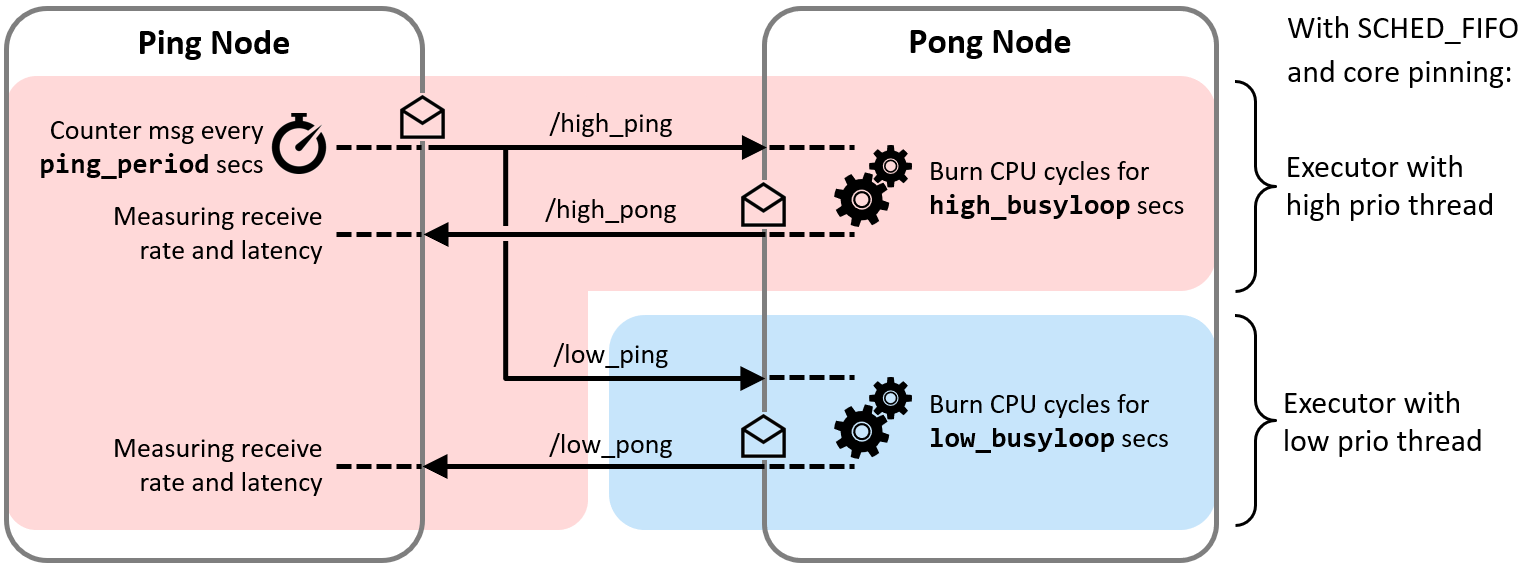
With the test bench, we validated the functioning of the approach.
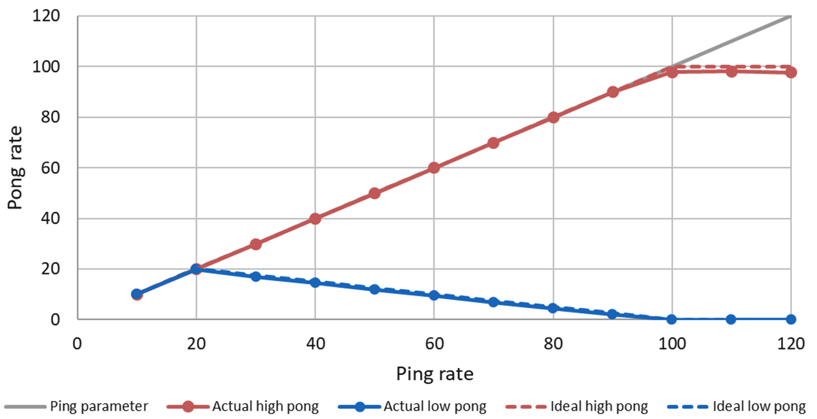
In this example, the callback for the high priority task (red line) consumes 10ms and the low priority task (blue line) 40ms in the Pong Node. With a ping rate of 20 Hz, the CPU saturates (10ms*20+40ms*20=1000ms). With higher frequencies the high priorty task can continue to send its pong message, while the low priority pong task degrades. With a frequency of 100Hz the high priority task requires 100% CPU utilization. With higher ping rates it keeps sending pong messages with 100Hz, while the low priority task does not get any CPU ressources any more and cannot send any messages.
The test bench is provided in the cbg_executor_demo.
Related Work
In this section, we provide an overview to related approaches and link to the corresponding APIs.
Fawkes Framework
Fawkes is a robotic software framework, which supports synchronization points for sense-plan-act like execution. It has been developed by RWTH Aachen since 2006. Source code is available at github.com/fawkesrobotics.
Synchronization
Fawkes provides developers different synchronization points, which are very useful for defining an execution order of a typical sense-plan-act application. These ten synchronization points (wake-up hooks) are the following (cf. libs/aspect/blocked_timing.h):
- WAKEUP_HOOK_PRE_LOOP
- WAKEUP_HOOK_SENSOR_ACQUIRE
- WAKEUP_HOOK_SENSOR_PREPARE
- WAKEUP_HOOK_SENSOR_PROCESS
- WAKEUP_HOOK_WORLDSTATE
- WAKEUP_HOOK_THINK
- WAKEUP_HOOK_SKILL
- WAKEUP_HOOK_ACT
- WAKEUP_HOOK_ACT_EXEC
- WAKEUP_HOOK_POST_LOOP
Configuration at compile time
At compile time, a desired synchronization point is defined as a constructor parameter for a module. For example, assuming that mapLaserGenThread shall be executed in SENSOR_ACQUIRE, the constructor is implemented as:
MapLaserGenThread::MapLaserGenThread()
:: Thread("MapLaserGenThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_ACQUIRE),
TransformAspect(TransformAspect::BOTH_DEFER_PUBLISHER, "Map Laser Odometry")
Similarly, if NaoQiButtonThread shall be executed in the SENSOR_PROCESS hook, the constructor is:
NaoQiButtonThread::NaoQiButtonThread()
:: Thread("NaoQiButtonThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_PROCESS)
Runtime execution
At runtime, the Executor iterates through the list of synchronization points and executes all registered threads until completion. Then, the threads of the next synchronization point are called.
A module (thread) can be configured independent of these sense-plan-act synchronization points. This has the effect, that this thread is executed in parallel to this chain.
The high level overview of the Fawkes framework is shown in the next figure. At compile-time the configuration of the sense-plan act wakeup hook is done (upper part), while at run-time the scheduler iterates through this list of wakeup-hooks (lower part):
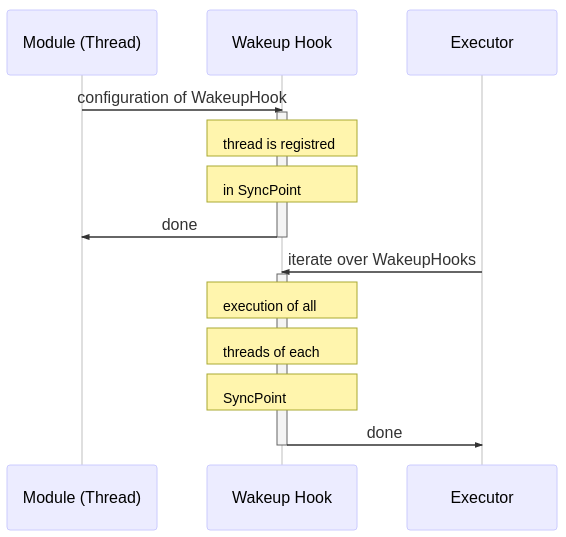
Hence, at run-time, the hooks are executed as a fixed static schedule without preemption. Multiple threads registered in the same hook are executed in parallel.
Orthogonal to the sequential execution of sense-plan-act like applications, it is possible to define further constraints on the execution order by means of a Barrier. A barrier defines a number of threads, which need to have finished before the thread can start, which owns the barrier.
These concepts are implemented by the following main classes:
-
Wakeup hook by
SyncPointandSyncPointManager, which manages a list of synchronization points. -
Executor by the class
FawkesMainThread, which is the scheduler, responsible for calling the user threads. -
ThreadManager, which is derived fromBlockedTimingExecutor, provides the necessary API to add and remove threads to wakeup hooks as well as for sequential execution of the wakeup-hooks. -
Barrieris an object similar tocondition_variablein C++.
Discussion
All threads are executed with the same priority. If multiple sense-plan-act chains shall be executed with different priorities, e.g. to prefer execution of emergency-stop over normal operation, then this framework reaches its limits.
Also, different execution frequencies cannot be modeled by a single instance of this sense-plan-act chain. However, in robotics the fastest sensor will drive the chain and all other hooks are executed with the same frequency.
The option to execute threads independent of the predefined wakeup-hooks is very useful, e.g. for diagnostics. The concept of the Barrier is useful for satisfying functional dependencies which need to be considered in the execution order.
References
[S2021] J. Staschulat, "Micro-ROS: The rclc Executor", in Workshop ROS 2 Executor: How to make it efficient, real-time and deterministic? at ROS World, Oct. 2021, [slides] [Video]
[SLD2021] J. Staschulat, R. Lange and D. N. Dasari, "Budget-based real-time Executor for Micro-ROS", arXiv Pre-Print, May 2021. [paper]
[L2020] Ralph Lange: Advanced Execution Management with ROS 2, ROS-Industrial Conference, Dec 2020 [Slides]
[SLL2020] J. Staschulat, I. Lütkebohle and R. Lange, "The rclc Executor: Domain-specific deterministic scheduling mechanisms for ROS applications on microcontrollers: work-in-progress," 2020 International Conference on Embedded Software (EMSOFT), Singapore, Singapore, 2020, pp. 18-19. [Paper] [Video]
[CB2019] D. Casini, T. Blaß, I. Lütkebohle, B. Brandenburg: Response-Time Analysis of ROS 2 Processing Chains under Reservation-Based Scheduling, in Euromicro-Conference on Real-Time Systems 2019. [Paper] [slides]
[L2018] Ralph Lange: Callback-group-level Executor for ROS 2. Lightning talk at ROSCon 2018. Madrid, Spain. Sep 2018. [Slides] [Video]
[EK2018] R. Ernst, S. Kuntz, S. Quinton, M. Simons: The Logical Execution Time Paradigm: New Perspectives for Multicore Systems, February 25-28 2018 (Dagstuhl Seminar 18092). [Paper]
[NSP2018] A. Naderlinger, S. Resmerita, and W. Pree: LET for Legacy and Model-based Applications, Proceedings of The Logical Execution Time Paradigm: New Perspectives for Multicore Systems (Dagstuhl Seminar 18092), Wadern, Germany, February 2018.
[BP2017] A. Biondi, P. Pazzaglia, A. Balsini, M. D. Natale: Logical Execution Time Implementation and Memory Optimization Issues in AUTOSAR Applications for Multicores, International Worshop on Analysis Tools and Methodologies for Embedded and Real-Time Systems (WATERS2017), Dubrovnik, Croatia.[Paper]
[KZH2015] S. Kramer, D. Ziegenbein, and A. Hamann: Real World Automotive Benchmarks For Free, International Workshop on Analysis Tools and Methodologies for Embedded adn Real-Time Sysems (WATERS), 2015.
[HHK2001] Henzinger T.A., Horowitz B., Kirsch C.M. (2001) Giotto: A Time-Triggered Language for Embedded Programming. In: Henzinger T.A., Kirsch C.M. (eds) Embedded Software. EMSOFT 2001. Lecture Notes in Computer Science, vol 2211. Springer, Berlin, Heidelberg
[LL1973] Liu, C. L.; Layland, J.:Scheduling algorithms for multiprogramming in a hard real-time environment, Journal of the ACM, 20 (1): 46–61, 1973.
Changelog for package rclc
5.0.1 (2023-06-15)
- Data structures interfaces for multi-threaded executor (#355)
- Updated ros-tooling versions (#361)
- Updated actions/checkout version (#367)
- Updated branch and distribution name to iron (#371)
3.0.9 (2023-03-22)
- Added build status of bloom-releases for Humble distribution (#291)
- [rolling] updated ros-tooling versions (#289)
- github action: updated os-version to ubuntu-22.04 (backport #295) (#296)
- Added documentation (#301)
- Drop build dependency on std_msgs (#314)
- Updated
and (#318) - Removed build status for Galactic in README (EOL November 2022) (#321)
- Update documentation about number_of_handles (#326)
- executor.h: Fix a few docs typos (#338)
3.0.8 (2022-04-14)
- Remove duplicate typedefs. (#249)
- Add rmw dependencies due to EventsExecutor PR in rcl (#255)
- Fix action client & server deallocation (#257)
- updated documentation: build status for Rolling (#266)
- Update action client goal callback signature (#282)
- Upgrade parameters (#274)
3.0.7 (2022-02-17)
- Fix enum naming for avoid collision (#242)
- Added dependency for package performance-test-fixture (#245)
3.0.6 (2022-01-25)
- executor ignore canceled timers (#220)
- uddated documentation README.md (#229)
- resolved error in unit test see issue #230 (#231)
- Add thread dependency to examples (Rolling) (#237) (resolves in this package only cpplint errors)
3.0.5 (2021-11-23)
- Fix data_available reset for timer (backport #215) (#217)
3.0.4 (2021-11-17)
- Ignoring unsuccessful SERVICE_TAKE (#175)
- Add rclc_parameter Quality Declaration (#144)
- use-ros2-testing (#185)
- Fix: printf in executor spin (#195)
- Fix init options handling (#202) (#205)
- Remove init options from support (#203)
- RCLC Actions Implementation (#170)
- Add rcl_action as build export dependency (#211)
3.0.3 (2021-07-28)
- Checking for valid ROS context in spin_some
- Refactoring executor (removing callback_type)
- Fixing codecov config
3.0.2 (2021-07-26)
- Updated codecov to ignore test folders
- Updated bloom release status table
3.0.1 (2021-07-17)
- Added rclc_parameter package
- Added quality of service entity creation API
- Added executor prepare API
- Added support for removing subscription from executor
- Added support for subscription with context
- Added quality declaration statement
- Updated compatability function for sleep
- Removed duplicate NOTICE files
2.0.0 (2021-04-23)
- Added codecov support
- New API of rcl_lifecycle in Rolling required major version bump
1.0.1 (2021-03-29)
- Windows port
- Compatibility sleep function (Windows, POSIX-OS)
- Fixed RCL lifecycle API change for Rolling
1.0.0 (2021-03-04)
- Service callbacks with context
- Fixed minor issues unit tests
- Upgraded setup_ros action (ci jobs)
- Removed Eloquent from ci jobs
0.1.7 (2021-01-20)
- Corrected corrupted changelog
0.1.6 (2021-01-20)
- Fixed issues due to Github Action timing delays on cloud build
- Fixed missing package dependency in Github Action for Eloquent
0.1.5 (2020-12-11)
- Added support for services,clients and guard_conditions to rclc executor
- Added table for bloom release status in README file
0.1.4 (2020-11-25)
- Fixed error in bloom release
0.1.3 (2020-11-23)
- Added rclc_lifecycle package
- Change maintainer information
- Minor fixes, updated unit tests
0.1.2 (2020-05-19)
- Fixed compiler errors for bloom release
0.1.1 (2020-05-14)
- Initial release
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Launch files
Messages
Services
Plugins
Recent questions tagged rclc at Robotics Stack Exchange
|
|
rclc package from rclc reporclc rclc_examples rclc_lifecycle rclc_parameter |
|
|
Package Summary
| Tags | No category tags. |
| Version | 6.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/rclc.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2024-04-05 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Jan Staschulat
- Pablo Garrido
Authors
- Jan Staschulat
- William Woodall
The rclc package
Table of contents
Introduction
Predictable execution under given real-time constraints is a crucial requirement for many robotic applications. While the service-based paradigm of ROS allows a fast integration of many different functionalities, it does not provide sufficient control over the execution management. For example, there are no mechanisms to enforce a certain execution order of callbacks within a node. Also the execution order of multiple nodes is essential for control applications in mobile robotics. Cause-effect-chains comprising of sensor acquisition, evaluation of data and actuation control should be mapped to ROS nodes executed in this order, however there are no explicit mechanisms to enforce it. Furthermore, when data recordings collected in field tests as ROS-bags are re-played, then the results are often surprisingly different due to non-determinism of process scheduling.
Manually setting up a particular execution order of subscriptions and publishing topics as well as defining use-case specific priorities of the corresponding Linux processes is always possible. However, this approach is error-prone, difficult to extend and requires an in-depth knowledge of the deployed ROS 2 packages in the system.
Therefore the goal of the Executor in micro-ROS is to support roboticists with practical and easy-to-use real-time mechanisms which provide solutions for: - Deterministic execution - Real-time guarantees - Integration of real-time and non real-time functionalities on one platform - Specific support for RTOS and microcontrollers
In ROS 1 a network thread is responsible for receiving all messages and putting them into a FIFO queue (in roscpp). That is, all callbacks were called in a FIFO manner, without any execution management. With the introduction of DDS (data distribution service) in ROS 2, the messages are buffered in DDS. In ROS 2, an Executor concept was introduced to support execution management. At the rcl-layer, a wait-set is configured with handles to be received and in a second step, the handles are taken from the DDS-queue. A handle is a generic term defined in rcl-layer for timers, subscriptions, services, clients and guard conditions.
The standard implementation of the ROS 2 Executor for the C++ API (rclcpp) has, however, certain unusual features, like precedence of timers over all other DDS handles, non-preemptive round-robin scheduling for non-timer handles and considering only one input data for each handle (even if multiple could be available). These features have the consequence, that in certain situations the standard rclcpp Executor is not deterministic and it makes guaranteeing real-time requirements very hard [CB2019]. We have not looked at the ROS 2 Executor implementation for Python Frontend (rclpy) because we consider a micro-controllers platform, on which typically C or C++ appliations will run.
Given the goals for a Real-Time Executor and the limitations of the ROS 2 standard rclcpp Executor, the challenges are: - to develop an adequate and well-defined scheduling mechanisms for the ROS 2 framework and the real-time operating system (RTOS) - to define an easy-to-use interface for ROS developers - to model requirements (like latencies, determinism in subsystems) - mapping of ROS 2 framework and operating system schedulers (semi-automated and optimized mapping is desired as well as generic, well-understood framework mechanisms)
Our approach is to provide a real-time-capable Executor for the rcl+rclc layer (as described in section Introduction to Client Library.) in the C programming language .
As the first step, we propose the rclc Executor for the rcl-layer in C programming language with several new features to support real-time and deterministic execution: It supports 1.) user-defined static sequential execution, 2) conditional execution semantics, 3) multi-threaded execution with scheduling configuration, and 4) logical execution semantics (LET). Sequential execution refers to the runtime behavior, that all callbacks are executed in a pre-defined order independent of the arrival time of messages. Conditional execution is available with a trigger condition which enables typical processing patterns in robotics (which are analyzed in detail in section Analysis of processing patterns. Configuration of scheduling parameters for multi-threaded application accomplishes prioritized execution. The logical execution time concept (LET) provides data synchronization for fixed periodic task scheduling of embedded applications.
Beyond the advanced execution management mechanisms for micro-ROS, we also contributed to improving and extending the Executor concept in rclcpp for standard ROS 2: the callback group-level Executor. It is not a new Executor but rather a refinement of the ROS 2 Executor API allowing to prioritize a group of callbacks which is not possible with the ROS 2 default Executor in its current Galactic release.
Analysis of rclcpp standard Executor
ROS 2 allows to bundle multiple nodes in one operating system process. To coordinate the execution of the callbacks of the nodes of a process, the Executor concept was introduced in rclcpp (and also in rclpy).
The ROS 2 design defines one Executor (instance of rclcpp::executor::Executor) per process, which is typically created either in a custom main function or by the launch system. The Executor coordinates the execution of all callbacks issued by these nodes by checking for available work (timers, services, messages, subscriptions, etc.) from the DDS queue and dispatching it to one or more threads, implemented in SingleThreadedExecutor and MultiThreadedExecutor, respectively.
The dispatching mechanism resembles the ROS 1 spin thread behavior: the Executor looks up the wait sets, which notifies it of any pending callback in the DDS queue. If there are multiple pending callbacks, the ROS 2 Executor executes them in an in the order as they were registered at the Executor.
Architecture
The following diagram depicts the relevant classes of the standard ROS 2 Executor implementation:
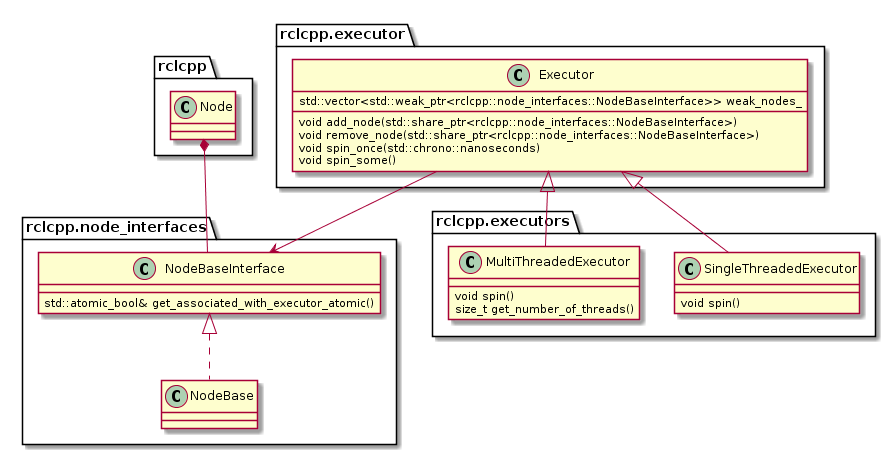
Note that an Executor instance maintains weak pointers to the NodeBaseInterfaces of the nodes only. Therefore, nodes can be destroyed safely, without notifying the Executor.
Also, the Executor does not maintain an explicit callback queue, but relies on the queue mechanism of the underlying DDS implementation as illustrated in the following sequence diagram:
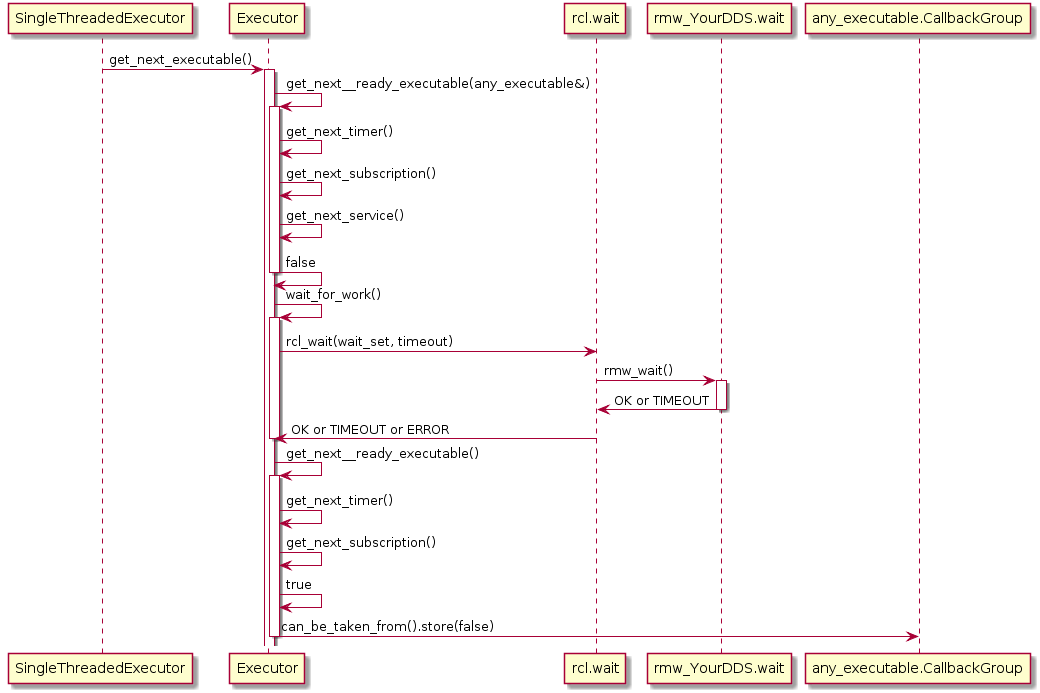
The Executor concept, however, does not provide means for prioritization or categorization of the incoming callback calls. Moreover, it does not leverage the real-time characteristics of the underlying operating-system scheduler to have finer control on the order of executions. The overall implication of this behavior is that time-critical callbacks could suffer possible deadline misses and a degraded performance since they are serviced later than non-critical callbacks. Additionally, due to the FIFO mechanism, it is difficult to determine usable bounds on the worst-case latency that each callback execution may incur.
Scheduling Semantics
In a recent paper [CB2019], the rclcpp Executor has been analyzed in detail and a response time analysis of cause-effect chains has been proposed under reservation-based scheduling. The Executor distinguishes four categories of callbacks: timers, which are triggered by system-level timers, subscribers, which are triggered by new messages on a subscribed topic, services, which are triggered by service requests, and clients, which are triggered by responses to service requests. The Executor is responsible for taking messages from the input queues of the DDS layer and executing the corresponding callback. Since it executes callbacks to completion, it is a non-preemptive scheduler, However it does not consider all ready tasks for execution, but only a snapshot, called readySet. This readySet is updated when the Executor is idle and in this step it interacts with the DDS layer updating the set of ready tasks. Then for every type of task, there are dedicated queues (timers, subscriptions, services, clients) which are processed sequentially. The following undesired properties were pointed out:
- Timers have the highest priority. The Executor processes timers always first. This can lead to the intrinsic effect, that in overload situations messages from the DDS queue are not processed.
- Non-preemptive round-robin scheduling of non-timer handles. Messages arriving during the processing of the readySet are not considered until the next update, which depends on the execution time of all remaining callbacks. This leads to priority inversion, as lower-priority callbacks may implicitly block higher-priority callbacks by prolonging the current processing of the readySet.
- Only one message per handle is considered. The readySet contains only one task instance, For example, even if multiple messages of the same topic are available, only one instance is processed until the Executor is idle again and the readySet is updated from the DDS layer. This aggravates priority inversion, as a backlogged callback might have to wait for multiple processing of readySets until it is considered for scheduling. This means that non-timer callback instances might be blocked by multiple instances of the same lower-priority callback.
Due to these findings, the authors present an alternative approach to provide determinism and to apply well-known schedulability analyses to a ROS 2 systems. A response time analysis is described under reservation-based scheduling.
Analysis of processing patterns
The development of an execution management mechanism for micro-ROS is based on an analysis of processing patterns commonly used in robotics and embedded systems. First, typical processing patterns in mobile robotics are presented which are used to implement deterministic behavior. Then, the processing patterns in the real-time embedded systems are analyzed, in which, as a main difference, the time-triggered paradigm is applied to accomplish real-time behavior.
Sense-plan-act pipeline in robotics
Now we describe common software design patterns which are used in mobile robotics to achieve deterministic behavior. For each design pattern we describe the concept and the derived requirements for a deterministic Executor.
Concept:
A common design paradigm in mobile robotics is a control loop, consisting of several phases: A sensing phase to aquire sensor data, a plan phase for localization and path planning and an actuation-phase to steer the mobile robot. Of course, more phases are possible, here these three phases shall serve as an example. Such a processing pipeline is shown in Figure 1.

Typically multiple sensors are used to perceive the environment. For example an IMU and a laser scanner. The quality of localization algorithms highly depend on how old such sensor data is when it is processed. Ideally the latest data of all sensors should be processed. One way to achive this is to execute first all sensor drivers in the sense-phase and then process all algorithms in the plan-phase.
Currently, such a processing order cannot be defined with the default Executor of rclcpp. One could in principle design a data-driven pipeline, however if e.g. the Laser scan is needed by some other callback in the sense-phase as well as in the plan-phase, the processing order of these subscribers is arbitrary.
For this sense-plan-act pattern, we could define one executor for each phase. The plan-phase would be triggered only when all callbacks in the sense-phase have finished.
Derived requirements: - triggered execution
Synchronization of multiple rates
Concept:
Often multiple sensors are being used to sense the environment for mobile robotics. While an IMU sensor provides data samples at a very high rate (e.g., 500 Hz), laser scans are availabe at a much slower frequency (e.g. 10Hz) determined by the revolution time. Then the challenge is, how to deterministically fuse sensor data with different frequencies. This problem is depicted in Figure 2.
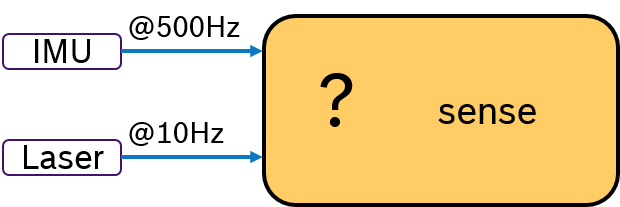
Due to scheduling effects, the callback for evaluating the laser scan might be called just before or just after an IMU data is received. One way to tackle this is to write additional synchronization code inside the application. Obviously, this is a cumbersome and not-portable solution.
An Alternative would be to evalute the IMU sample and the laser scan by synchronizing their frequency. For example by processing always 50 IMU samples with one laser scan. This approach is shown in Figure 3. A pre-processing callback aggregates the IMU samples and sends an aggregated message with 50 samples at 10Hz rate. Now both messages have the same frequency. With a trigger condition, which fires when both messages are available, the sensor fusion algorithm can expect always synchronized input data.
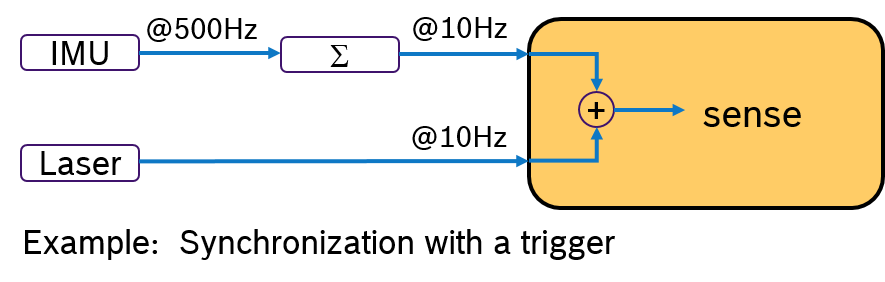
In ROS 2, this is currently not possible to be modeled because of the lack of a trigger concept in the Executors of rclcpp and rclpy. Message filters could be used to synchronize input data based on the timestamp in the header, but this is only available in rclcpp (and not in rcl). Further more, it would be more efficient to have such a trigger concept directly in the Executor.
Another idea would be to activly request for IMU data only when a laser scan is received. This concept is shown in Figure 4. Upon arrival of a laser scan mesage, first, a message with aggregated IMU samples is requested. Then, the laser scan is processed and later the sensor fusion algorithm. An Executor, which would support sequential execution of callbacks, could realize this idea.
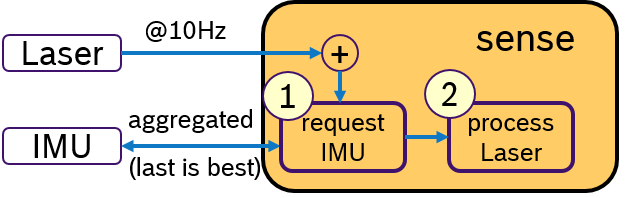
Derived requirements: - triggered execution - sequential procesing of callbacks
High-priority processing path
Concept Often a robot has to fullfill several activities at the same time. For example following a path and avoiding obstacles. While path following is a permanent activity, obstacle avoidance is trigged by the environment and should be immediately reacted upon. Therefore one would like to specify priorities to activities. This is depicted in Figure 5:
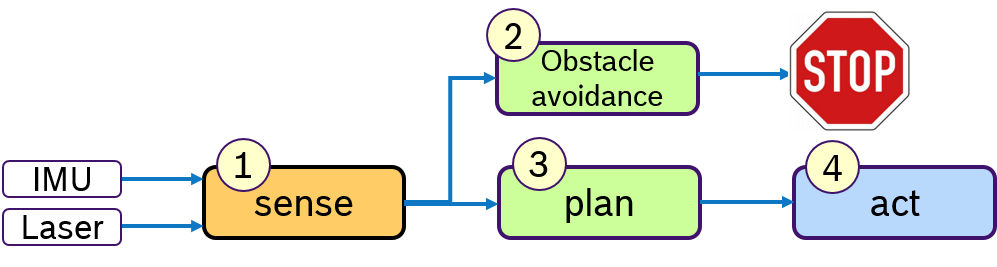
Assuming a simplified control loop with the activities sense-plan-act, the obstacle avoidance, which might temporarily stop the robot, should be processed before the planning phase. In this example we assume that these activites are processed in one thread.
Derived requirements: - sequential processing of callbacks
Real-time embedded applications
In embedded systems, real-time behavior is approached by using the time-triggered paradigm, which means that the processes are periodically activated. Processes can be assigned priorities to allow pre-emptions. Figure 6 shows an example, in which three processes with fixed periods are shown. The middle and lower process are preempted multiple times depicted with empty dashed boxes.
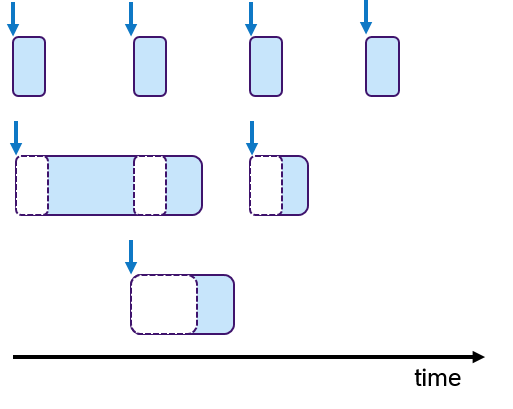
To each process one or multiple tasks can be assigned, as shown in Figure 7. These tasks are executed sequentially, which is often called cooperative scheduling.
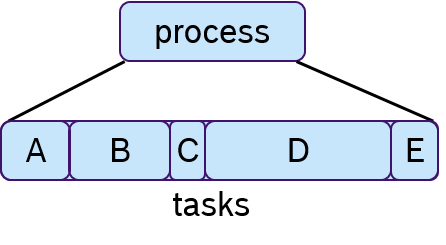
While there are different ways to assign priorities to a given number of processes, the rate-monotonic scheduling assignment, in which processes with a shorter period have a higher priority, has been shown optimal if the processor utilization is less than 69% [LL1973].
In the last decades many different scheduling approaches have been presented, however fixed-periodic preemptive scheduling is still widely used in embedded real-time systems [KZH2015]. This becomes also obvious, when looking at the features of current operating systems. Like Linux, real-time operating systems, such as NuttX, Zephyr, FreeRTOS, QNX etc., support fixed-periodic preemptive scheduling and the assignment of priorities, which makes the time-triggered paradigm the dominant design principle in this domain.
However, data consistency is often an issue when preemptive scheduling is used and if data is being shared across multiple processes via global variables. Due to scheduling effects and varying execution times of processes, writing and reading these variables could occur sometimes sooner or later. This results in an latency jitter of update times (the timepoint at which a variable change becomes visible to other processes). Race conditions can occur when multiple processes access a variable at the same time. So solve this problem, the concept of logical-execution time (LET) was introduced in [HHK2001], in which communication of data occurs only at pre-defined periodic time instances: Reading data only at the beginning of the period and writing data only at the end of the period. The cost of an additional latency delay is traded for data consistency and reduced jitter. This concept has also recently been applied to automotive applications[NSP2018].
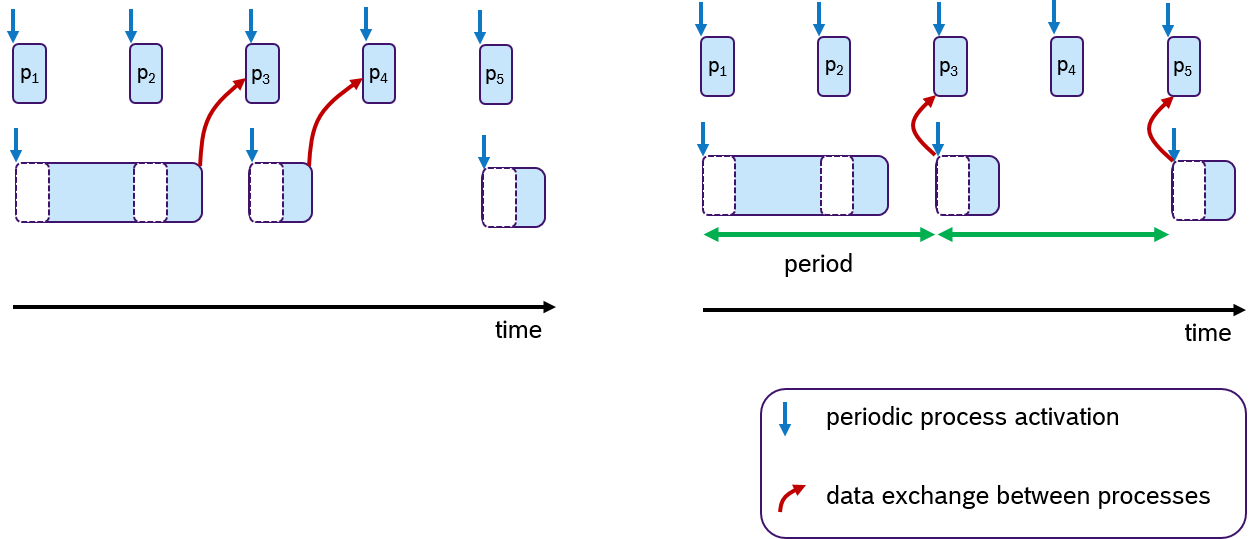
An Example of the LET concept is shown in Figure 8. Assume that two processes are communicating data via one global variable. The timepoint when this data is written is at the end of the processing time. In the default case (left side), the process p3 and p4 receive the update. At the right side of Figure 8, the same scenario is shown with LET semantics. Here, the data is communicated only at period boundaries. In this case, the lower process communicates at the end of the period, so that always process p3 and p5 receive the new data.
Concept: - periodic execution of processes - assignment of fixed priorities to processes - preemptive scheduling of processes - co-operative scheduling of tasks within a process (sequential execution) - data synchronization with LET-semantics
While periodic activation is possible in ROS 2 by using timers, preemptive scheduling is supported by the operating system and assigning priorities on the granularity of threads/processes that correspond to the ROS nodes; it is not possible to sequentially execute callbacks, which have no data-dependency. Furthermore data is read from the DDS queue just before the callback is executed and data is written sometime during the time the application is executed. While the spin_period function of the rclcpp Executor allows to check for data at a fixed period and executing those callbacks for which data is available, however, with this spin-function does not execute all callbacks irrespective wheter data is available or not. So spin_period is not helpful to periodically execute a number of callbacks (aka tasks within a process). So we need a mechanism that triggers the execution of multiple callbacks (aka tasks) based on a timer. Data transmission is achieved via DDS which does not allow to implement a LET-semantics. To summarize, we derive the following requirements.
Derived requirements: - trigger the execution - sequential processing of callbacks - data synchronization with LET semantics
rclc Executor
The rclc Executor is a ROS 2 Executor based on the rcl-layer in C programming language. As discussed above, the default rclcpp Executor is not suitable to implement real-time applications because of three main reasons: timers are preferred over all other handles, no priorization of callback execution and the round-robin to completion execution of callbacks. On the other hand, several processing patterns have been developed as best practices to achieve non-functional requirements, such as bounded end-to-end latencies, low jitter of response times of cause-effect chains, deterministic processing and short response times even in overload situations. These processing patterns are difficult to implement with the concepts availabe in the default ROS 2 Executor, therefore we have developed a flexible Executor: the rclc Executor.
Features
The rclc Executor is feature-complete, i.e. it supports all event types as the default ROS 2 Executor, which are: - subscriptions - timers - services - clients - guard conditions - actions - lifecycle
The flexible rclc Executor provides on top the following new features: - triggered execution - user-defined sequential execution - multi-threading and scheduling configuration (WIP) - LET-semantics for data synchronization of periodic process scheduling
First, a trigger condition allows to define when the processing of a callback shall start. This is useful to implement sense-plan-act control loops or more complex processing structures with directed acyclic graphs. Second, a user can specify the processing order in which these callbacks will be executed. With this feature, the pattern of sensor fusion with multiple rates, in which data is requested from a sensor based on the arrival of some other sensor, can be easily implemented. Third, the assignment of scheduling parameters (e.g., priorities) of the underlying operating system. With this feature, prioritized processing can be implemented. Finally, for periodic applications, the LET Semantics has been implemented to support data consistency for periodic process scheduling. These features are now described in more detail.
Sequential execution
- At configuration, the user defines the order of handles.
- At configuration, the user defines whether the handle shall be called only when new data is available (ON_NEW_DATA) or whether the callback shall always be called (ALWAYS).
- At runtime, all handles are processed in the user-defined order
- if the configuration of handle is ON_NEW_DATA, then the corresponding callback is only called if new data is available
- if the configuration of the handle is ALWAYS, then the corresponding callback is always. If no data is available, then the callback is called with no data (e.g. NULL pointer).
Figure 9 shows three callbacks, A, B and C. Assume, they shall be executed in the order B,A,C. Then the user adds the callbacks to the rclc Executor in this order. Whenever new messages have arrived then the callbacks for which a new message is availabe will be always executed in the user-defined processing order.
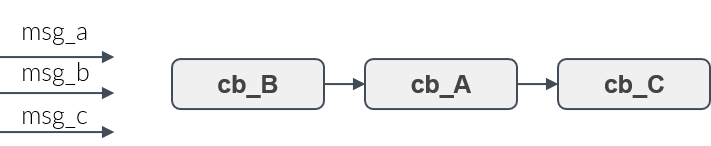
Trigger condition
- Given a set of handles, a trigger condition, which is based on the availability of input data of these handles, decides when the processing of all callbacks starts. This is shown in Figure 10.
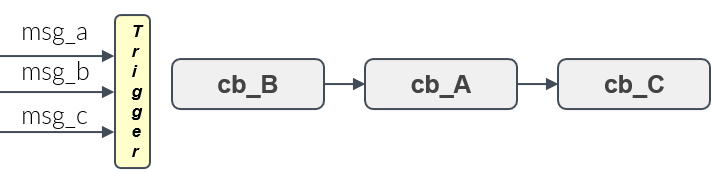
- Available options:
- ALL operation: fires when input data is available for all handles
- ANY operation: fires when input data is available for at least one handle (OR semantics)
- ONE: fires when input data for a user-specified handle is available
- User-defined function: user can implement custom logic
Figure 11 shows an example of the ALL semantics. Only if all messages msg_A, msg_B, msg_C were received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order.
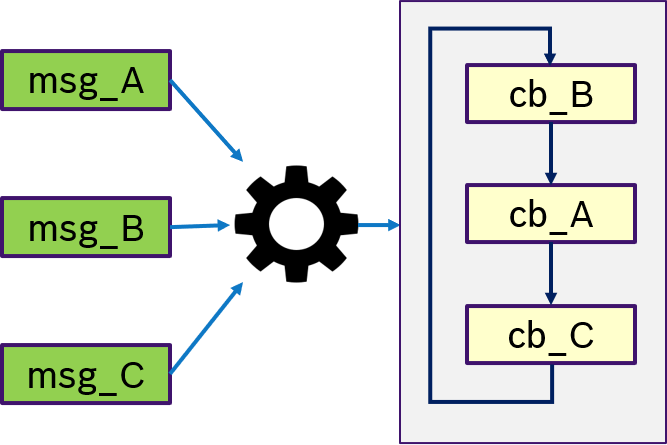
Figure 12 shows an example of the ANY semantics. Thas is, if any messages msg_A, msg_B, msg_C was received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order. This is equivalent to OR semantics.
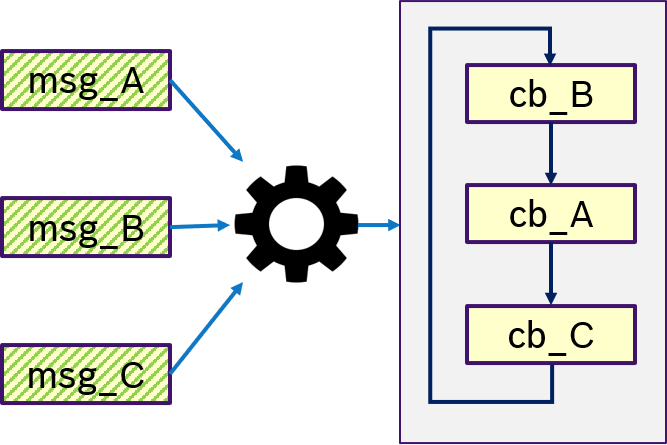
Figure 13 shows an example of the ONE semantics. Thas is, only if message msg_B was received, the trigger condition is fullfilled and (potentially all) callbacks are processed in a user-defined order.
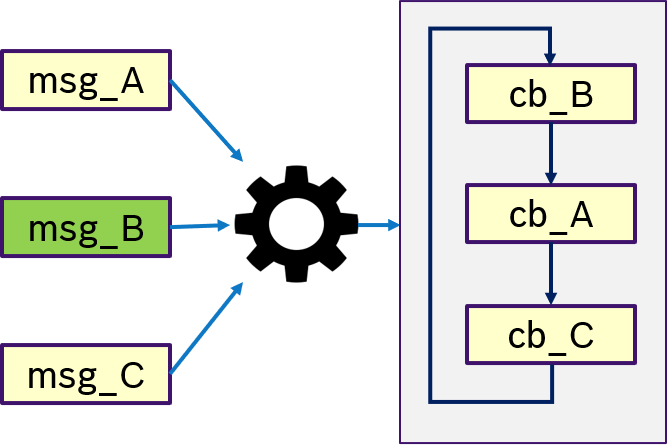
Figure 14 describes the custom semantics. A custom trigger condition with could be a more complex logic of multiple messages, can be passed to the executor. This might also include hardware triggers, like interrupts.
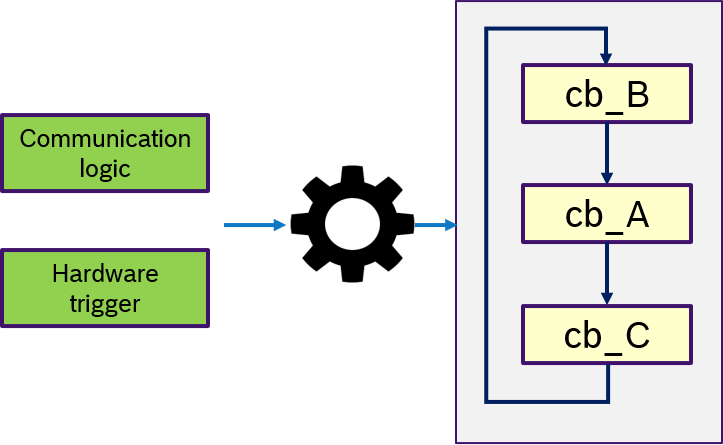
LET-Semantics
- Assumption: time-triggered system, the executor is activated periodically
- When the trigger fires, reads all input data and makes a local copy
- Processes all callbacks in sequential order
- Write output data at the end of the executor's period (Note: this is not implemented yet)
Additionally we have implemented the current rclcpp Executor semantics ("RCLCPP"): - waiting for new data for all handles (rcl_wait) - using trigger condition ANY - if trigger fires, start processing handles in pre-defined sequential order - request from DDS-queue the new data just before the handle is executed (rcl_take)
The selection of the Executor semantics is optional. The default semantics is "RCLCPP".
Multi-threading and scheduling configuration
The rclc Executor has been extended for multi-threading. It supports the assignment of scheduling policies, like priorities or more advanced scheduling algorithms as reservation-based scheduling, to subscription callbacks. [Pull Request, Pre-print SLD2021]. The overall architecture is shown in Figure 15. One Executor thread is responsible for checking for new data from the DDS queue. For every callback, a thread is spawned with the dedicted scheduling policy provided by the operating system. The Executor then dispatches new data of a subscription to it's corresponding callback function, which is then executed in its own thread by operating system.
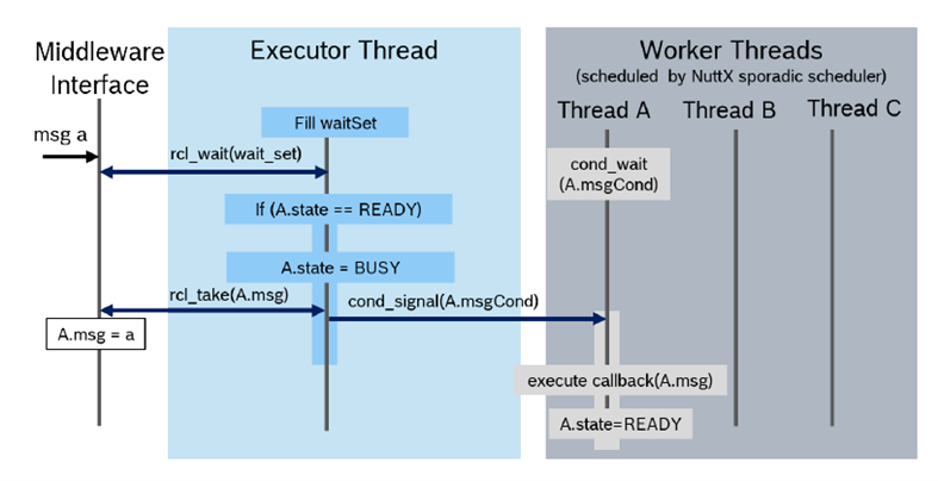
Executor API
The API of the rclc Executor can be divided in two phases: Configuration and Running.
Configuration phase
During the configuration phase, the user shall define: - the total number of callbacks - the sequence of the callbacks - trigger condition (optional, default: ANY) - data communcation semantics (optional, default ROS2)
As the Executor is intended for embedded controllers, dynamic memory management is crucial. Therefore at initialization of the rclc Executor, the user defines the total number of callbacks. The necessary dynamic memory will be allocated only in this phase and no more memory in the running phase. This makes this Executor static in the sense, that during runtime no additional callbacks can be added.
Also in the XRCE-DDS middleware the maximum number of handles need to be configured. See Memory Management Tutorial for the defaults and configuration of the colcon.meta configuration file. To make sure that the changes were applied, you can check the defined values in the following library include file: build/rmw_microxrcedds/include/rmw_microxrcedds_c/config.h.
Then, the user adds handles and the corresponding callbacks (e.g. for subscriptions and timers) to the Executor. The order in which this takes place, defines later the sequential processing order during runtime.
For each handle the user can specify, if the callback shall be executed only if new data is available (ON_NEW_DATA) or if the callback shall always be executed (ALWAYS). The second option is useful when the callback is expected to be called at a fixed rate.
The trigger condition defines when the processing of these callbacks shall start. For convenience some default conditions have been defined:
- trigger_any(default) : start executing if any callback has new data
- trigger_all : start executing if all callbacks have new data
- trigger_one(&data) : start executing if data has been received
- user_defined_function: the user can also define its own function with more complex logic
With 'trigger_any' being the default, the current semantics of the rclcpp Executor is selected.
The data communication semantics can be - ROS2 (default) - LET
To be compatible with ROS2 rclcpp Executor, the existing rclcpp semantics is implemented as 'ROS2'. That is, with the spin-function the DDS-queue is constantly monitored for new data (rcl_wait). If new data becomes available, then is fetched from DDS (rcl_take) immediately before the callback is executed. All callbacks are processed in the user-defined order, this is the only difference to the rclcpp Executor, in which no order can be specified.
Secondly, the LET semantics is implemented such that at the beginning of processing all available data is fetched (rcl_take) and buffered and then the callbacks are processed in the pre-defined operating on the buffered copy.
Running phase
As the main functionality, the Executor has a spin-function which constantly checks for new data at the DDS-queue, like the rclcpp Executor in ROS2. If the trigger condition is satisfied then all available data from the DDS queue is processed according to the specified semantics (ROS or LET) in the user-defined sequential order. After all callbacks have been processed the DDS is checked for new data again.
Available spin functions are
- spin_some - spin one time
- spin_period - spin with a period
- spin - spin indefinitly
Examples
We provide the relevant code snippets how to setup the rclc Executor for the processing patterns as described above.
Sense-plan-act pipeline in robotics example
In this example we want to realise a sense-plan-act pipeline in a single thread. The trigger condition is demonstrated by activating
the sense-phase when both data for the Laser and IMU are available. Three executors are necessary exe_sense, exe_plan and exe_act. The two sensor acquisition callbacks sense_Laser and sense_IMU are registered in the Executor exe_sense.
The trigger condition ALL is responsible to activate the sense-phase only when all data for these two callbacks are available. Finally all three Executors are spinning using a while-loop and the spin_some function.
The definitions of callbacks are omitted.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act;
rcle_let_executor_t exe_sense, exe_plan, exe_act;
// initialize executors
rclc_executor_init(&exe_sense, &context, 2, ...);
rclc_executor_init(&exe_plan, &context, 1, ...);
rclc_executor_init(&exe_act, &context, 1, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb1, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb2, ON_NEW_DATA);
rclc_let_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// executor for plan-phase
rclc_executor_add_subscription(&exe_plan, &plan, &my_sub_cb3, ON_NEW_DATA);
// executor for act-phase
rclc_executor_add_subscription(&exe_act, &act, &my_sub_cb4, ON_NEW_DATA);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_sense);
rclc_executor_spin_some(&exe_plan);
rclc_executor_spin_some(&exe_act);
}
Synchronization of multiple rates example
The sensor fusion synchronizing the multiple rates with a trigger is shown below.
...
rcl_subscription_t aggr_IMU, sense_Laser, sense_IMU;
rcle_let_executor_t exe_aggr, exe_sense;
// initialize executors
rclc_executor_init(&exe_aggr, &context, 1, ...);
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for aggregate IMU data
rclc_executor_add_subscription(&exe_aggr, &aggr_IMU, &my_sub_cb1, ON_NEW_DATA);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb3, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_aggr);
rclc_executor_spin_some(&exe_sense);
}
The setup for the sensor fusion using sequential execution is shown below.
Note that the sequetial order is sense_IMU, which will request the aggregated IMU message, and then sense_Laser
while the trigger will fire, when a laser message is received.
...
rcl_subscription_t sense_Laser, sense_IMU;
rcle_let_executor_t exe_sense;
// initialize executor
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe_sense);
High priority processing path example
This example shows the sequential processing order to execute the obstacle avoidance obst_avoid
after the callbacks of the sense-phase and before the callback of the planning phase plan.
The control loop is started when a laser message is received. Then an aggregated IMU message is requested,
like in the example above. Then all the other callbacks are always executed. This assumes that these callbacks
communicate via a global data structure. Race conditions cannot occur, because the callbacks
run all in one thread.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act, obst_avoid;
rcle_let_executor_t exe;
// initialize executors
rclc_executor_init(&exe, &context, 5, ...);
// define processing order
rclc_executor_add_subscription(&exe, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe, &obst_avoid, &my_sub_cb3, ALWAYS);
rclc_executor_add_subscription(&exe, &plan, &my_sub_cb4, ALWAYS);
rclc_executor_add_subscription(&exe, &act, &my_sub_cb5, ALWAYS);
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe);
Real-time embedded applications example
With seqential execution the co-operative scheduling of tasks within a process can be modeled. The trigger condition is used to periodically activate the process which will then execute all callbacks in a pre-defined order. Data will be communicated using the LET-semantics. Every Executor is executed in its own tread, to which an appropriate priority can be assigned.
In the following example, the Executor is setup with 4 handles. We assume a process has three subscriptions sub1, sub2, sub3. The sequential processing order is given by the order as they are added to the Executor. A timer timer defines the period. The trigger_one with the paramter timer is used, so that whenever the timer is ready, all callbacks are processed. Finally the data communication semantics LET is defined.
#include "rcl_executor/let_executor.h"
// define subscription callback
void my_sub_cb1(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb2(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb3(const void * msgin)
{
// ...
}
// define timer callback
void my_timer_cb(rcl_timer_t * timer, int64_t last_call_time)
{
// ...
}
// necessary ROS 2 objects
rcl_context_t context;
rcl_node_t node;
rcl_subscription_t sub1, sub2, sub3;
rcl_timer_t timer;
rcle_let_executor_t exe;
// define ROS context
context = rcl_get_zero_initialized_context();
// initialize ROS node
rcl_node_init(&node, &context,...);
// create subscriptions
rcl_subscription_init(&sub1, &node, ...);
rcl_subscription_init(&sub2, &node, ...);
rcl_subscription_init(&sub3, &node, ...);
// create a timer
rcl_timer_init(&timer, &my_timer_cb, ... );
// initialize executor with four handles
rclc_executor_init(&exe, &context, 4, ...);
// define static execution order of handles
rclc_executor_add_subscription(&exe, &sub1, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sub2, &my_sub_cb2, ALWAYS);
rclc_executor_add_subscription(&exe, &sub3, &my_sub_cb3, ALWAYS);
rclc_executor_add_timer(&exe, &timer);
// trigger when handle 'timer' is ready
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &timer);
// select LET-semantics
rclc_executor_data_comm_semantics(&exe, LET);
// spin forever
rclc_executor_spin(&exe);
ROS 2 Executor Workshop Reference System
The rclc Executor has been presented at the workshop 'ROS 2 Executor: How to make it efficient, real-time and deterministic?' at ROS World 2021 (i.e. the online version of ROSCon)[S2021]. A Reference System for testing and benchmarking ROS Executors has been developed for this workshop. The application of the rclc Executor on the reference system with the trigger condition can be found in the rclc-executor branch of the Reference System.
The slides can be downloaded here. All information and the videos and slides of the other talks of the workshop can be found at www.apex.ai/roscon-21.
Future work
- Full LET semantics (writing data at the end of the period)
- one publisher that periodically publishes
- if Executors are running in multiple threads, publishing needs to be atomic
- Multi-threaded executor with assignment of scheduling policies of unerlying operating system. [Pull Request, pre-print SLD2021].
Download
The rclc Executor can be downloaded from the ros2/rclc repository. It is available for the ROS 2 versions Foxy, Galactic and Rolling. The repository provides several packages including the rclc Executor and an rclc_examples package with several application examples.
Callback-group-level Executor
The Callback-group-level Executor was an early prototype for a refined rclcpp Executor API developed in micro-ROS. It has been derived from the default rclcpp Executor and addresses some of the aforementioned deficits. Most important, it was used to validate that the underlying layers (rcl, rmw, rmw_adapter, DDS) allow for multiple Executor instances without any negative interferences.
As the default rclcpp Executor works at a node-level granularity – which is a limitation given that a node may issue different callbacks needing different real-time guarantees - we decided to refine the API for more fine-grained control over the scheduling of callbacks on the granularity of callback groups using. We leverage the callback-group concept existing in rclcpp by introducing real-time profiles such as RT-CRITICAL and BEST-EFFORT in the callback-group API (i.e. rclcpp/callback_group.hpp). Each callback needing specific real-time guarantees, when created, may therefore be associated with a dedicated callback group. With this in place, we enhanced the Executor and depending classes (e.g., for memory allocation) to operate at a finer callback-group granularity. This allows a single node to have callbacks with different real-time profiles assigned to different Executor instances - within one process.
Thus, an Executor instance can be dedicated to specific callback group(s) and the Executor’s thread(s) can be prioritized according to the real-time requirements of these groups. For example, all time-critical callbacks are handled by an "RT-CRITICAL" Executor instance running at the highest scheduler priority.
The following Figure illustrates this approach with two nodes served by three Callback-group-level Executors in one process:
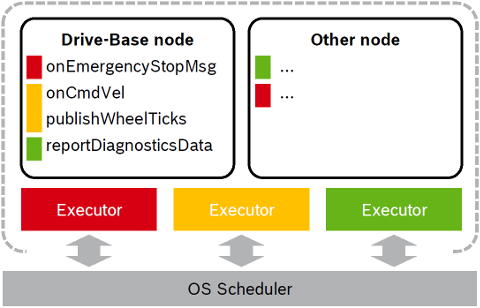
The different callbacks of the Drive-Base node are distributed to different Executors (visualized by the color red, yellow and green). For example the onCmdVel and publishWheelTicks callback are scheduled by the same Executor (yellow). Callbacks from different nodes can be serviced by the same Executor.
API Changes
In this section, we describe the necessary changes to the Executor API: * include/rclcpp/callback_group.hpp:
* Introduced an enum to distinguish up to three real-time classes (requirements) per node (RealTimeCritical, SoftRealTime, BestEffort)
* Changed association with Executor instance from nodes to callback groups.
-
- Added functions to add and remove individual callback groups in addition to whole nodes.
- Replaced private vector of nodes with a map from callback groups to nodes.
-
include/rclcpp/memory_strategy.hpp
- Changed all functions that expect a vector of nodes to the just mentioned map.
-
include/rclcpp/node.hpp and include/rclcpp/node_interfaces/node_base.hpp
- Extended arguments of create_callback_group function for the real-time class.
- Removed the get_associated_with_executor_atomic function.
The callback-group-level executor has been merged into ROS 2 rclcpp in pull request 1218.
Test Bench
As a proof of concept, we implemented a small test bench in the present package cbg-executor_ping-pong_cpp. The test bench comprises a Ping node and a Pong node which exchange real-time and best-effort messages simultaneously with each other. Each class of messages is handled with a dedicated Executor, as illustrated in the following Figure.
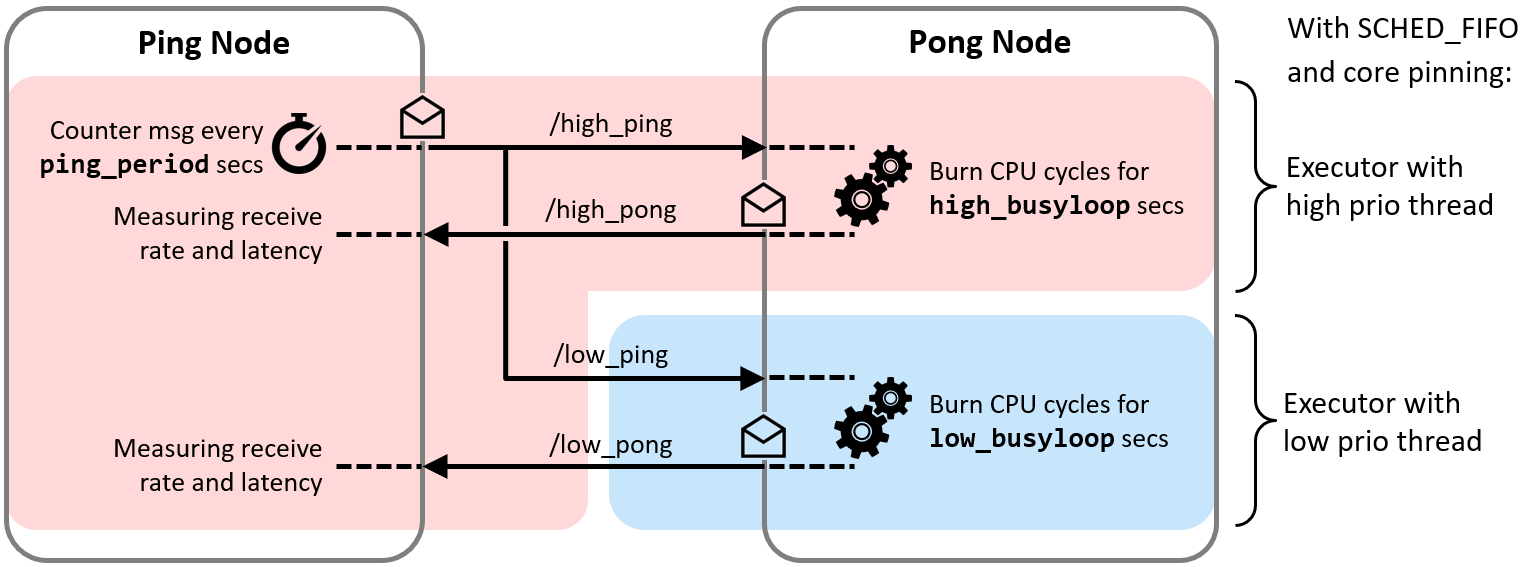
With the test bench, we validated the functioning of the approach.
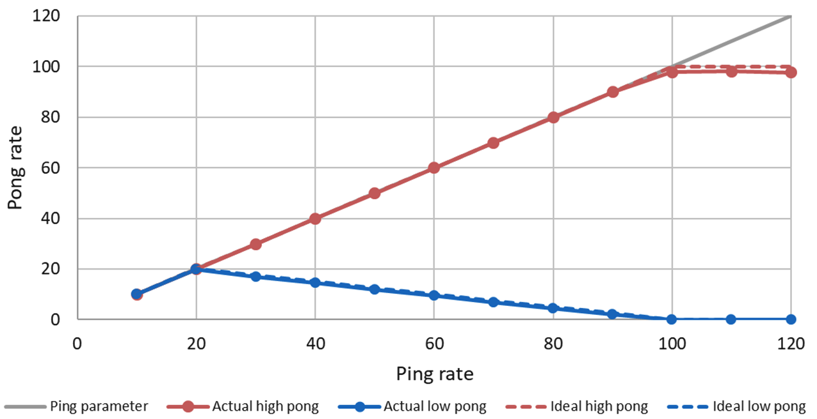
In this example, the callback for the high priority task (red line) consumes 10ms and the low priority task (blue line) 40ms in the Pong Node. With a ping rate of 20 Hz, the CPU saturates (10ms*20+40ms*20=1000ms). With higher frequencies the high priorty task can continue to send its pong message, while the low priority pong task degrades. With a frequency of 100Hz the high priority task requires 100% CPU utilization. With higher ping rates it keeps sending pong messages with 100Hz, while the low priority task does not get any CPU ressources any more and cannot send any messages.
The test bench is provided in the cbg_executor_demo.
Related Work
In this section, we provide an overview to related approaches and link to the corresponding APIs.
Fawkes Framework
Fawkes is a robotic software framework, which supports synchronization points for sense-plan-act like execution. It has been developed by RWTH Aachen since 2006. Source code is available at github.com/fawkesrobotics.
Synchronization
Fawkes provides developers different synchronization points, which are very useful for defining an execution order of a typical sense-plan-act application. These ten synchronization points (wake-up hooks) are the following (cf. libs/aspect/blocked_timing.h):
- WAKEUP_HOOK_PRE_LOOP
- WAKEUP_HOOK_SENSOR_ACQUIRE
- WAKEUP_HOOK_SENSOR_PREPARE
- WAKEUP_HOOK_SENSOR_PROCESS
- WAKEUP_HOOK_WORLDSTATE
- WAKEUP_HOOK_THINK
- WAKEUP_HOOK_SKILL
- WAKEUP_HOOK_ACT
- WAKEUP_HOOK_ACT_EXEC
- WAKEUP_HOOK_POST_LOOP
Configuration at compile time
At compile time, a desired synchronization point is defined as a constructor parameter for a module. For example, assuming that mapLaserGenThread shall be executed in SENSOR_ACQUIRE, the constructor is implemented as:
MapLaserGenThread::MapLaserGenThread()
:: Thread("MapLaserGenThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_ACQUIRE),
TransformAspect(TransformAspect::BOTH_DEFER_PUBLISHER, "Map Laser Odometry")
Similarly, if NaoQiButtonThread shall be executed in the SENSOR_PROCESS hook, the constructor is:
NaoQiButtonThread::NaoQiButtonThread()
:: Thread("NaoQiButtonThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_PROCESS)
Runtime execution
At runtime, the Executor iterates through the list of synchronization points and executes all registered threads until completion. Then, the threads of the next synchronization point are called.
A module (thread) can be configured independent of these sense-plan-act synchronization points. This has the effect, that this thread is executed in parallel to this chain.
The high level overview of the Fawkes framework is shown in the next figure. At compile-time the configuration of the sense-plan act wakeup hook is done (upper part), while at run-time the scheduler iterates through this list of wakeup-hooks (lower part):
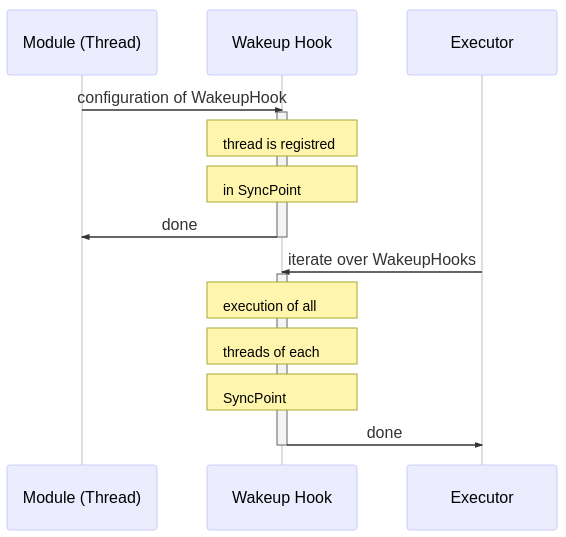
Hence, at run-time, the hooks are executed as a fixed static schedule without preemption. Multiple threads registered in the same hook are executed in parallel.
Orthogonal to the sequential execution of sense-plan-act like applications, it is possible to define further constraints on the execution order by means of a Barrier. A barrier defines a number of threads, which need to have finished before the thread can start, which owns the barrier.
These concepts are implemented by the following main classes:
-
Wakeup hook by
SyncPointandSyncPointManager, which manages a list of synchronization points. -
Executor by the class
FawkesMainThread, which is the scheduler, responsible for calling the user threads. -
ThreadManager, which is derived fromBlockedTimingExecutor, provides the necessary API to add and remove threads to wakeup hooks as well as for sequential execution of the wakeup-hooks. -
Barrieris an object similar tocondition_variablein C++.
Discussion
All threads are executed with the same priority. If multiple sense-plan-act chains shall be executed with different priorities, e.g. to prefer execution of emergency-stop over normal operation, then this framework reaches its limits.
Also, different execution frequencies cannot be modeled by a single instance of this sense-plan-act chain. However, in robotics the fastest sensor will drive the chain and all other hooks are executed with the same frequency.
The option to execute threads independent of the predefined wakeup-hooks is very useful, e.g. for diagnostics. The concept of the Barrier is useful for satisfying functional dependencies which need to be considered in the execution order.
References
[S2021] J. Staschulat, "Micro-ROS: The rclc Executor", in Workshop ROS 2 Executor: How to make it efficient, real-time and deterministic? at ROS World, Oct. 2021, [slides] [Video]
[SLD2021] J. Staschulat, R. Lange and D. N. Dasari, "Budget-based real-time Executor for Micro-ROS", arXiv Pre-Print, May 2021. [paper]
[L2020] Ralph Lange: Advanced Execution Management with ROS 2, ROS-Industrial Conference, Dec 2020 [Slides]
[SLL2020] J. Staschulat, I. Lütkebohle and R. Lange, "The rclc Executor: Domain-specific deterministic scheduling mechanisms for ROS applications on microcontrollers: work-in-progress," 2020 International Conference on Embedded Software (EMSOFT), Singapore, Singapore, 2020, pp. 18-19. [Paper] [Video]
[CB2019] D. Casini, T. Blaß, I. Lütkebohle, B. Brandenburg: Response-Time Analysis of ROS 2 Processing Chains under Reservation-Based Scheduling, in Euromicro-Conference on Real-Time Systems 2019. [Paper] [slides]
[L2018] Ralph Lange: Callback-group-level Executor for ROS 2. Lightning talk at ROSCon 2018. Madrid, Spain. Sep 2018. [Slides] [Video]
[EK2018] R. Ernst, S. Kuntz, S. Quinton, M. Simons: The Logical Execution Time Paradigm: New Perspectives for Multicore Systems, February 25-28 2018 (Dagstuhl Seminar 18092). [Paper]
[NSP2018] A. Naderlinger, S. Resmerita, and W. Pree: LET for Legacy and Model-based Applications, Proceedings of The Logical Execution Time Paradigm: New Perspectives for Multicore Systems (Dagstuhl Seminar 18092), Wadern, Germany, February 2018.
[BP2017] A. Biondi, P. Pazzaglia, A. Balsini, M. D. Natale: Logical Execution Time Implementation and Memory Optimization Issues in AUTOSAR Applications for Multicores, International Worshop on Analysis Tools and Methodologies for Embedded and Real-Time Systems (WATERS2017), Dubrovnik, Croatia.[Paper]
[KZH2015] S. Kramer, D. Ziegenbein, and A. Hamann: Real World Automotive Benchmarks For Free, International Workshop on Analysis Tools and Methodologies for Embedded adn Real-Time Sysems (WATERS), 2015.
[HHK2001] Henzinger T.A., Horowitz B., Kirsch C.M. (2001) Giotto: A Time-Triggered Language for Embedded Programming. In: Henzinger T.A., Kirsch C.M. (eds) Embedded Software. EMSOFT 2001. Lecture Notes in Computer Science, vol 2211. Springer, Berlin, Heidelberg
[LL1973] Liu, C. L.; Layland, J.:Scheduling algorithms for multiprogramming in a hard real-time environment, Journal of the ACM, 20 (1): 46–61, 1973.
Changelog for package rclc
6.1.0 (2023-06-15)
- Data structures interfaces for multi-threaded executor (#355)
- update ros-tooling versions (#361)
- updated actions/checkout version (#367)
- updated branch names to rolling (#370)
3.0.9 (2023-03-22)
- Added build status of bloom-releases for Humble distribution (#291)
- [rolling] updated ros-tooling versions (#289)
- github action: updated os-version to ubuntu-22.04 (backport #295) (#296)
- Added documentation (#301)
- Drop build dependency on std_msgs (#314)
- Updated
and (#318) - Removed build status for Galactic in README (EOL November 2022) (#321)
- Update documentation about number_of_handles (#326)
- executor.h: Fix a few docs typos (#338)
3.0.8 (2022-04-14)
- Remove duplicate typedefs. (#249)
- Add rmw dependencies due to EventsExecutor PR in rcl (#255)
- Fix action client & server deallocation (#257)
- updated documentation: build status for Rolling (#266)
- Update action client goal callback signature (#282)
- Upgrade parameters (#274)
3.0.7 (2022-02-17)
- Fix enum naming for avoid collision (#242)
- Added dependency for package performance-test-fixture (#245)
3.0.6 (2022-01-25)
- executor ignore canceled timers (#220)
- uddated documentation README.md (#229)
- resolved error in unit test see issue #230 (#231)
- Add thread dependency to examples (Rolling) (#237) (resolves in this package only cpplint errors)
3.0.5 (2021-11-23)
- Fix data_available reset for timer (backport #215) (#217)
3.0.4 (2021-11-17)
- Ignoring unsuccessful SERVICE_TAKE (#175)
- Add rclc_parameter Quality Declaration (#144)
- use-ros2-testing (#185)
- Fix: printf in executor spin (#195)
- Fix init options handling (#202) (#205)
- Remove init options from support (#203)
- RCLC Actions Implementation (#170)
- Add rcl_action as build export dependency (#211)
3.0.3 (2021-07-28)
- Checking for valid ROS context in spin_some
- Refactoring executor (removing callback_type)
- Fixing codecov config
3.0.2 (2021-07-26)
- Updated codecov to ignore test folders
- Updated bloom release status table
3.0.1 (2021-07-17)
- Added rclc_parameter package
- Added quality of service entity creation API
- Added executor prepare API
- Added support for removing subscription from executor
- Added support for subscription with context
- Added quality declaration statement
- Updated compatability function for sleep
- Removed duplicate NOTICE files
2.0.0 (2021-04-23)
- Added codecov support
- New API of rcl_lifecycle in Rolling required major version bump
1.0.1 (2021-03-29)
- Windows port
- Compatibility sleep function (Windows, POSIX-OS)
- Fixed RCL lifecycle API change for Rolling
1.0.0 (2021-03-04)
- Service callbacks with context
- Fixed minor issues unit tests
- Upgraded setup_ros action (ci jobs)
- Removed Eloquent from ci jobs
0.1.7 (2021-01-20)
- Corrected corrupted changelog
0.1.6 (2021-01-20)
- Fixed issues due to Github Action timing delays on cloud build
- Fixed missing package dependency in Github Action for Eloquent
0.1.5 (2020-12-11)
- Added support for services,clients and guard_conditions to rclc executor
- Added table for bloom release status in README file
0.1.4 (2020-11-25)
- Fixed error in bloom release
0.1.3 (2020-11-23)
- Added rclc_lifecycle package
- Change maintainer information
- Minor fixes, updated unit tests
0.1.2 (2020-05-19)
- Fixed compiler errors for bloom release
0.1.1 (2020-05-14)
- Initial release
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Launch files
Messages
Services
Plugins
Recent questions tagged rclc at Robotics Stack Exchange
|
|
rclc package from rclc reporclc rclc_examples rclc_lifecycle rclc_parameter |
|
|
Package Summary
| Tags | No category tags. |
| Version | 6.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/rclc.git |
| VCS Type | git |
| VCS Version | rolling |
| Last Updated | 2024-04-05 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Jan Staschulat
- Pablo Garrido
Authors
- Jan Staschulat
- William Woodall
The rclc package
Table of contents
Introduction
Predictable execution under given real-time constraints is a crucial requirement for many robotic applications. While the service-based paradigm of ROS allows a fast integration of many different functionalities, it does not provide sufficient control over the execution management. For example, there are no mechanisms to enforce a certain execution order of callbacks within a node. Also the execution order of multiple nodes is essential for control applications in mobile robotics. Cause-effect-chains comprising of sensor acquisition, evaluation of data and actuation control should be mapped to ROS nodes executed in this order, however there are no explicit mechanisms to enforce it. Furthermore, when data recordings collected in field tests as ROS-bags are re-played, then the results are often surprisingly different due to non-determinism of process scheduling.
Manually setting up a particular execution order of subscriptions and publishing topics as well as defining use-case specific priorities of the corresponding Linux processes is always possible. However, this approach is error-prone, difficult to extend and requires an in-depth knowledge of the deployed ROS 2 packages in the system.
Therefore the goal of the Executor in micro-ROS is to support roboticists with practical and easy-to-use real-time mechanisms which provide solutions for: - Deterministic execution - Real-time guarantees - Integration of real-time and non real-time functionalities on one platform - Specific support for RTOS and microcontrollers
In ROS 1 a network thread is responsible for receiving all messages and putting them into a FIFO queue (in roscpp). That is, all callbacks were called in a FIFO manner, without any execution management. With the introduction of DDS (data distribution service) in ROS 2, the messages are buffered in DDS. In ROS 2, an Executor concept was introduced to support execution management. At the rcl-layer, a wait-set is configured with handles to be received and in a second step, the handles are taken from the DDS-queue. A handle is a generic term defined in rcl-layer for timers, subscriptions, services, clients and guard conditions.
The standard implementation of the ROS 2 Executor for the C++ API (rclcpp) has, however, certain unusual features, like precedence of timers over all other DDS handles, non-preemptive round-robin scheduling for non-timer handles and considering only one input data for each handle (even if multiple could be available). These features have the consequence, that in certain situations the standard rclcpp Executor is not deterministic and it makes guaranteeing real-time requirements very hard [CB2019]. We have not looked at the ROS 2 Executor implementation for Python Frontend (rclpy) because we consider a micro-controllers platform, on which typically C or C++ appliations will run.
Given the goals for a Real-Time Executor and the limitations of the ROS 2 standard rclcpp Executor, the challenges are: - to develop an adequate and well-defined scheduling mechanisms for the ROS 2 framework and the real-time operating system (RTOS) - to define an easy-to-use interface for ROS developers - to model requirements (like latencies, determinism in subsystems) - mapping of ROS 2 framework and operating system schedulers (semi-automated and optimized mapping is desired as well as generic, well-understood framework mechanisms)
Our approach is to provide a real-time-capable Executor for the rcl+rclc layer (as described in section Introduction to Client Library.) in the C programming language .
As the first step, we propose the rclc Executor for the rcl-layer in C programming language with several new features to support real-time and deterministic execution: It supports 1.) user-defined static sequential execution, 2) conditional execution semantics, 3) multi-threaded execution with scheduling configuration, and 4) logical execution semantics (LET). Sequential execution refers to the runtime behavior, that all callbacks are executed in a pre-defined order independent of the arrival time of messages. Conditional execution is available with a trigger condition which enables typical processing patterns in robotics (which are analyzed in detail in section Analysis of processing patterns. Configuration of scheduling parameters for multi-threaded application accomplishes prioritized execution. The logical execution time concept (LET) provides data synchronization for fixed periodic task scheduling of embedded applications.
Beyond the advanced execution management mechanisms for micro-ROS, we also contributed to improving and extending the Executor concept in rclcpp for standard ROS 2: the callback group-level Executor. It is not a new Executor but rather a refinement of the ROS 2 Executor API allowing to prioritize a group of callbacks which is not possible with the ROS 2 default Executor in its current Galactic release.
Analysis of rclcpp standard Executor
ROS 2 allows to bundle multiple nodes in one operating system process. To coordinate the execution of the callbacks of the nodes of a process, the Executor concept was introduced in rclcpp (and also in rclpy).
The ROS 2 design defines one Executor (instance of rclcpp::executor::Executor) per process, which is typically created either in a custom main function or by the launch system. The Executor coordinates the execution of all callbacks issued by these nodes by checking for available work (timers, services, messages, subscriptions, etc.) from the DDS queue and dispatching it to one or more threads, implemented in SingleThreadedExecutor and MultiThreadedExecutor, respectively.
The dispatching mechanism resembles the ROS 1 spin thread behavior: the Executor looks up the wait sets, which notifies it of any pending callback in the DDS queue. If there are multiple pending callbacks, the ROS 2 Executor executes them in an in the order as they were registered at the Executor.
Architecture
The following diagram depicts the relevant classes of the standard ROS 2 Executor implementation:
Note that an Executor instance maintains weak pointers to the NodeBaseInterfaces of the nodes only. Therefore, nodes can be destroyed safely, without notifying the Executor.
Also, the Executor does not maintain an explicit callback queue, but relies on the queue mechanism of the underlying DDS implementation as illustrated in the following sequence diagram:
The Executor concept, however, does not provide means for prioritization or categorization of the incoming callback calls. Moreover, it does not leverage the real-time characteristics of the underlying operating-system scheduler to have finer control on the order of executions. The overall implication of this behavior is that time-critical callbacks could suffer possible deadline misses and a degraded performance since they are serviced later than non-critical callbacks. Additionally, due to the FIFO mechanism, it is difficult to determine usable bounds on the worst-case latency that each callback execution may incur.
Scheduling Semantics
In a recent paper [CB2019], the rclcpp Executor has been analyzed in detail and a response time analysis of cause-effect chains has been proposed under reservation-based scheduling. The Executor distinguishes four categories of callbacks: timers, which are triggered by system-level timers, subscribers, which are triggered by new messages on a subscribed topic, services, which are triggered by service requests, and clients, which are triggered by responses to service requests. The Executor is responsible for taking messages from the input queues of the DDS layer and executing the corresponding callback. Since it executes callbacks to completion, it is a non-preemptive scheduler, However it does not consider all ready tasks for execution, but only a snapshot, called readySet. This readySet is updated when the Executor is idle and in this step it interacts with the DDS layer updating the set of ready tasks. Then for every type of task, there are dedicated queues (timers, subscriptions, services, clients) which are processed sequentially. The following undesired properties were pointed out:
- Timers have the highest priority. The Executor processes timers always first. This can lead to the intrinsic effect, that in overload situations messages from the DDS queue are not processed.
- Non-preemptive round-robin scheduling of non-timer handles. Messages arriving during the processing of the readySet are not considered until the next update, which depends on the execution time of all remaining callbacks. This leads to priority inversion, as lower-priority callbacks may implicitly block higher-priority callbacks by prolonging the current processing of the readySet.
- Only one message per handle is considered. The readySet contains only one task instance, For example, even if multiple messages of the same topic are available, only one instance is processed until the Executor is idle again and the readySet is updated from the DDS layer. This aggravates priority inversion, as a backlogged callback might have to wait for multiple processing of readySets until it is considered for scheduling. This means that non-timer callback instances might be blocked by multiple instances of the same lower-priority callback.
Due to these findings, the authors present an alternative approach to provide determinism and to apply well-known schedulability analyses to a ROS 2 systems. A response time analysis is described under reservation-based scheduling.
Analysis of processing patterns
The development of an execution management mechanism for micro-ROS is based on an analysis of processing patterns commonly used in robotics and embedded systems. First, typical processing patterns in mobile robotics are presented which are used to implement deterministic behavior. Then, the processing patterns in the real-time embedded systems are analyzed, in which, as a main difference, the time-triggered paradigm is applied to accomplish real-time behavior.
Sense-plan-act pipeline in robotics
Now we describe common software design patterns which are used in mobile robotics to achieve deterministic behavior. For each design pattern we describe the concept and the derived requirements for a deterministic Executor.
Concept:
A common design paradigm in mobile robotics is a control loop, consisting of several phases: A sensing phase to aquire sensor data, a plan phase for localization and path planning and an actuation-phase to steer the mobile robot. Of course, more phases are possible, here these three phases shall serve as an example. Such a processing pipeline is shown in Figure 1.
Typically multiple sensors are used to perceive the environment. For example an IMU and a laser scanner. The quality of localization algorithms highly depend on how old such sensor data is when it is processed. Ideally the latest data of all sensors should be processed. One way to achive this is to execute first all sensor drivers in the sense-phase and then process all algorithms in the plan-phase.
Currently, such a processing order cannot be defined with the default Executor of rclcpp. One could in principle design a data-driven pipeline, however if e.g. the Laser scan is needed by some other callback in the sense-phase as well as in the plan-phase, the processing order of these subscribers is arbitrary.
For this sense-plan-act pattern, we could define one executor for each phase. The plan-phase would be triggered only when all callbacks in the sense-phase have finished.
Derived requirements: - triggered execution
Synchronization of multiple rates
Concept:
Often multiple sensors are being used to sense the environment for mobile robotics. While an IMU sensor provides data samples at a very high rate (e.g., 500 Hz), laser scans are availabe at a much slower frequency (e.g. 10Hz) determined by the revolution time. Then the challenge is, how to deterministically fuse sensor data with different frequencies. This problem is depicted in Figure 2.
Due to scheduling effects, the callback for evaluating the laser scan might be called just before or just after an IMU data is received. One way to tackle this is to write additional synchronization code inside the application. Obviously, this is a cumbersome and not-portable solution.
An Alternative would be to evalute the IMU sample and the laser scan by synchronizing their frequency. For example by processing always 50 IMU samples with one laser scan. This approach is shown in Figure 3. A pre-processing callback aggregates the IMU samples and sends an aggregated message with 50 samples at 10Hz rate. Now both messages have the same frequency. With a trigger condition, which fires when both messages are available, the sensor fusion algorithm can expect always synchronized input data.
In ROS 2, this is currently not possible to be modeled because of the lack of a trigger concept in the Executors of rclcpp and rclpy. Message filters could be used to synchronize input data based on the timestamp in the header, but this is only available in rclcpp (and not in rcl). Further more, it would be more efficient to have such a trigger concept directly in the Executor.
Another idea would be to activly request for IMU data only when a laser scan is received. This concept is shown in Figure 4. Upon arrival of a laser scan mesage, first, a message with aggregated IMU samples is requested. Then, the laser scan is processed and later the sensor fusion algorithm. An Executor, which would support sequential execution of callbacks, could realize this idea.
Derived requirements: - triggered execution - sequential procesing of callbacks
High-priority processing path
Concept Often a robot has to fullfill several activities at the same time. For example following a path and avoiding obstacles. While path following is a permanent activity, obstacle avoidance is trigged by the environment and should be immediately reacted upon. Therefore one would like to specify priorities to activities. This is depicted in Figure 5:
Assuming a simplified control loop with the activities sense-plan-act, the obstacle avoidance, which might temporarily stop the robot, should be processed before the planning phase. In this example we assume that these activites are processed in one thread.
Derived requirements: - sequential processing of callbacks
Real-time embedded applications
In embedded systems, real-time behavior is approached by using the time-triggered paradigm, which means that the processes are periodically activated. Processes can be assigned priorities to allow pre-emptions. Figure 6 shows an example, in which three processes with fixed periods are shown. The middle and lower process are preempted multiple times depicted with empty dashed boxes.
To each process one or multiple tasks can be assigned, as shown in Figure 7. These tasks are executed sequentially, which is often called cooperative scheduling.
While there are different ways to assign priorities to a given number of processes, the rate-monotonic scheduling assignment, in which processes with a shorter period have a higher priority, has been shown optimal if the processor utilization is less than 69% [LL1973].
In the last decades many different scheduling approaches have been presented, however fixed-periodic preemptive scheduling is still widely used in embedded real-time systems [KZH2015]. This becomes also obvious, when looking at the features of current operating systems. Like Linux, real-time operating systems, such as NuttX, Zephyr, FreeRTOS, QNX etc., support fixed-periodic preemptive scheduling and the assignment of priorities, which makes the time-triggered paradigm the dominant design principle in this domain.
However, data consistency is often an issue when preemptive scheduling is used and if data is being shared across multiple processes via global variables. Due to scheduling effects and varying execution times of processes, writing and reading these variables could occur sometimes sooner or later. This results in an latency jitter of update times (the timepoint at which a variable change becomes visible to other processes). Race conditions can occur when multiple processes access a variable at the same time. So solve this problem, the concept of logical-execution time (LET) was introduced in [HHK2001], in which communication of data occurs only at pre-defined periodic time instances: Reading data only at the beginning of the period and writing data only at the end of the period. The cost of an additional latency delay is traded for data consistency and reduced jitter. This concept has also recently been applied to automotive applications[NSP2018].
An Example of the LET concept is shown in Figure 8. Assume that two processes are communicating data via one global variable. The timepoint when this data is written is at the end of the processing time. In the default case (left side), the process p3 and p4 receive the update. At the right side of Figure 8, the same scenario is shown with LET semantics. Here, the data is communicated only at period boundaries. In this case, the lower process communicates at the end of the period, so that always process p3 and p5 receive the new data.
Concept: - periodic execution of processes - assignment of fixed priorities to processes - preemptive scheduling of processes - co-operative scheduling of tasks within a process (sequential execution) - data synchronization with LET-semantics
While periodic activation is possible in ROS 2 by using timers, preemptive scheduling is supported by the operating system and assigning priorities on the granularity of threads/processes that correspond to the ROS nodes; it is not possible to sequentially execute callbacks, which have no data-dependency. Furthermore data is read from the DDS queue just before the callback is executed and data is written sometime during the time the application is executed. While the spin_period function of the rclcpp Executor allows to check for data at a fixed period and executing those callbacks for which data is available, however, with this spin-function does not execute all callbacks irrespective wheter data is available or not. So spin_period is not helpful to periodically execute a number of callbacks (aka tasks within a process). So we need a mechanism that triggers the execution of multiple callbacks (aka tasks) based on a timer. Data transmission is achieved via DDS which does not allow to implement a LET-semantics. To summarize, we derive the following requirements.
Derived requirements: - trigger the execution - sequential processing of callbacks - data synchronization with LET semantics
rclc Executor
The rclc Executor is a ROS 2 Executor based on the rcl-layer in C programming language. As discussed above, the default rclcpp Executor is not suitable to implement real-time applications because of three main reasons: timers are preferred over all other handles, no priorization of callback execution and the round-robin to completion execution of callbacks. On the other hand, several processing patterns have been developed as best practices to achieve non-functional requirements, such as bounded end-to-end latencies, low jitter of response times of cause-effect chains, deterministic processing and short response times even in overload situations. These processing patterns are difficult to implement with the concepts availabe in the default ROS 2 Executor, therefore we have developed a flexible Executor: the rclc Executor.
Features
The rclc Executor is feature-complete, i.e. it supports all event types as the default ROS 2 Executor, which are: - subscriptions - timers - services - clients - guard conditions - actions - lifecycle
The flexible rclc Executor provides on top the following new features: - triggered execution - user-defined sequential execution - multi-threading and scheduling configuration (WIP) - LET-semantics for data synchronization of periodic process scheduling
First, a trigger condition allows to define when the processing of a callback shall start. This is useful to implement sense-plan-act control loops or more complex processing structures with directed acyclic graphs. Second, a user can specify the processing order in which these callbacks will be executed. With this feature, the pattern of sensor fusion with multiple rates, in which data is requested from a sensor based on the arrival of some other sensor, can be easily implemented. Third, the assignment of scheduling parameters (e.g., priorities) of the underlying operating system. With this feature, prioritized processing can be implemented. Finally, for periodic applications, the LET Semantics has been implemented to support data consistency for periodic process scheduling. These features are now described in more detail.
Sequential execution
- At configuration, the user defines the order of handles.
- At configuration, the user defines whether the handle shall be called only when new data is available (ON_NEW_DATA) or whether the callback shall always be called (ALWAYS).
- At runtime, all handles are processed in the user-defined order
- if the configuration of handle is ON_NEW_DATA, then the corresponding callback is only called if new data is available
- if the configuration of the handle is ALWAYS, then the corresponding callback is always. If no data is available, then the callback is called with no data (e.g. NULL pointer).
Figure 9 shows three callbacks, A, B and C. Assume, they shall be executed in the order B,A,C. Then the user adds the callbacks to the rclc Executor in this order. Whenever new messages have arrived then the callbacks for which a new message is availabe will be always executed in the user-defined processing order.
Trigger condition
- Given a set of handles, a trigger condition, which is based on the availability of input data of these handles, decides when the processing of all callbacks starts. This is shown in Figure 10.
- Available options:
- ALL operation: fires when input data is available for all handles
- ANY operation: fires when input data is available for at least one handle (OR semantics)
- ONE: fires when input data for a user-specified handle is available
- User-defined function: user can implement custom logic
Figure 11 shows an example of the ALL semantics. Only if all messages msg_A, msg_B, msg_C were received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order.
Figure 12 shows an example of the ANY semantics. Thas is, if any messages msg_A, msg_B, msg_C was received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order. This is equivalent to OR semantics.
Figure 13 shows an example of the ONE semantics. Thas is, only if message msg_B was received, the trigger condition is fullfilled and (potentially all) callbacks are processed in a user-defined order.
Figure 14 describes the custom semantics. A custom trigger condition with could be a more complex logic of multiple messages, can be passed to the executor. This might also include hardware triggers, like interrupts.
LET-Semantics
- Assumption: time-triggered system, the executor is activated periodically
- When the trigger fires, reads all input data and makes a local copy
- Processes all callbacks in sequential order
- Write output data at the end of the executor's period (Note: this is not implemented yet)
Additionally we have implemented the current rclcpp Executor semantics ("RCLCPP"): - waiting for new data for all handles (rcl_wait) - using trigger condition ANY - if trigger fires, start processing handles in pre-defined sequential order - request from DDS-queue the new data just before the handle is executed (rcl_take)
The selection of the Executor semantics is optional. The default semantics is "RCLCPP".
Multi-threading and scheduling configuration
The rclc Executor has been extended for multi-threading. It supports the assignment of scheduling policies, like priorities or more advanced scheduling algorithms as reservation-based scheduling, to subscription callbacks. [Pull Request, Pre-print SLD2021]. The overall architecture is shown in Figure 15. One Executor thread is responsible for checking for new data from the DDS queue. For every callback, a thread is spawned with the dedicted scheduling policy provided by the operating system. The Executor then dispatches new data of a subscription to it's corresponding callback function, which is then executed in its own thread by operating system.
Executor API
The API of the rclc Executor can be divided in two phases: Configuration and Running.
Configuration phase
During the configuration phase, the user shall define: - the total number of callbacks - the sequence of the callbacks - trigger condition (optional, default: ANY) - data communcation semantics (optional, default ROS2)
As the Executor is intended for embedded controllers, dynamic memory management is crucial. Therefore at initialization of the rclc Executor, the user defines the total number of callbacks. The necessary dynamic memory will be allocated only in this phase and no more memory in the running phase. This makes this Executor static in the sense, that during runtime no additional callbacks can be added.
Also in the XRCE-DDS middleware the maximum number of handles need to be configured. See Memory Management Tutorial for the defaults and configuration of the colcon.meta configuration file. To make sure that the changes were applied, you can check the defined values in the following library include file: build/rmw_microxrcedds/include/rmw_microxrcedds_c/config.h.
Then, the user adds handles and the corresponding callbacks (e.g. for subscriptions and timers) to the Executor. The order in which this takes place, defines later the sequential processing order during runtime.
For each handle the user can specify, if the callback shall be executed only if new data is available (ON_NEW_DATA) or if the callback shall always be executed (ALWAYS). The second option is useful when the callback is expected to be called at a fixed rate.
The trigger condition defines when the processing of these callbacks shall start. For convenience some default conditions have been defined:
- trigger_any(default) : start executing if any callback has new data
- trigger_all : start executing if all callbacks have new data
- trigger_one(&data) : start executing if data has been received
- user_defined_function: the user can also define its own function with more complex logic
With 'trigger_any' being the default, the current semantics of the rclcpp Executor is selected.
The data communication semantics can be - ROS2 (default) - LET
To be compatible with ROS2 rclcpp Executor, the existing rclcpp semantics is implemented as 'ROS2'. That is, with the spin-function the DDS-queue is constantly monitored for new data (rcl_wait). If new data becomes available, then is fetched from DDS (rcl_take) immediately before the callback is executed. All callbacks are processed in the user-defined order, this is the only difference to the rclcpp Executor, in which no order can be specified.
Secondly, the LET semantics is implemented such that at the beginning of processing all available data is fetched (rcl_take) and buffered and then the callbacks are processed in the pre-defined operating on the buffered copy.
Running phase
As the main functionality, the Executor has a spin-function which constantly checks for new data at the DDS-queue, like the rclcpp Executor in ROS2. If the trigger condition is satisfied then all available data from the DDS queue is processed according to the specified semantics (ROS or LET) in the user-defined sequential order. After all callbacks have been processed the DDS is checked for new data again.
Available spin functions are
- spin_some - spin one time
- spin_period - spin with a period
- spin - spin indefinitly
Examples
We provide the relevant code snippets how to setup the rclc Executor for the processing patterns as described above.
Sense-plan-act pipeline in robotics example
In this example we want to realise a sense-plan-act pipeline in a single thread. The trigger condition is demonstrated by activating
the sense-phase when both data for the Laser and IMU are available. Three executors are necessary exe_sense, exe_plan and exe_act. The two sensor acquisition callbacks sense_Laser and sense_IMU are registered in the Executor exe_sense.
The trigger condition ALL is responsible to activate the sense-phase only when all data for these two callbacks are available. Finally all three Executors are spinning using a while-loop and the spin_some function.
The definitions of callbacks are omitted.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act;
rcle_let_executor_t exe_sense, exe_plan, exe_act;
// initialize executors
rclc_executor_init(&exe_sense, &context, 2, ...);
rclc_executor_init(&exe_plan, &context, 1, ...);
rclc_executor_init(&exe_act, &context, 1, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb1, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb2, ON_NEW_DATA);
rclc_let_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// executor for plan-phase
rclc_executor_add_subscription(&exe_plan, &plan, &my_sub_cb3, ON_NEW_DATA);
// executor for act-phase
rclc_executor_add_subscription(&exe_act, &act, &my_sub_cb4, ON_NEW_DATA);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_sense);
rclc_executor_spin_some(&exe_plan);
rclc_executor_spin_some(&exe_act);
}
Synchronization of multiple rates example
The sensor fusion synchronizing the multiple rates with a trigger is shown below.
...
rcl_subscription_t aggr_IMU, sense_Laser, sense_IMU;
rcle_let_executor_t exe_aggr, exe_sense;
// initialize executors
rclc_executor_init(&exe_aggr, &context, 1, ...);
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for aggregate IMU data
rclc_executor_add_subscription(&exe_aggr, &aggr_IMU, &my_sub_cb1, ON_NEW_DATA);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb3, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_aggr);
rclc_executor_spin_some(&exe_sense);
}
The setup for the sensor fusion using sequential execution is shown below.
Note that the sequetial order is sense_IMU, which will request the aggregated IMU message, and then sense_Laser
while the trigger will fire, when a laser message is received.
...
rcl_subscription_t sense_Laser, sense_IMU;
rcle_let_executor_t exe_sense;
// initialize executor
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe_sense);
High priority processing path example
This example shows the sequential processing order to execute the obstacle avoidance obst_avoid
after the callbacks of the sense-phase and before the callback of the planning phase plan.
The control loop is started when a laser message is received. Then an aggregated IMU message is requested,
like in the example above. Then all the other callbacks are always executed. This assumes that these callbacks
communicate via a global data structure. Race conditions cannot occur, because the callbacks
run all in one thread.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act, obst_avoid;
rcle_let_executor_t exe;
// initialize executors
rclc_executor_init(&exe, &context, 5, ...);
// define processing order
rclc_executor_add_subscription(&exe, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe, &obst_avoid, &my_sub_cb3, ALWAYS);
rclc_executor_add_subscription(&exe, &plan, &my_sub_cb4, ALWAYS);
rclc_executor_add_subscription(&exe, &act, &my_sub_cb5, ALWAYS);
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe);
Real-time embedded applications example
With seqential execution the co-operative scheduling of tasks within a process can be modeled. The trigger condition is used to periodically activate the process which will then execute all callbacks in a pre-defined order. Data will be communicated using the LET-semantics. Every Executor is executed in its own tread, to which an appropriate priority can be assigned.
In the following example, the Executor is setup with 4 handles. We assume a process has three subscriptions sub1, sub2, sub3. The sequential processing order is given by the order as they are added to the Executor. A timer timer defines the period. The trigger_one with the paramter timer is used, so that whenever the timer is ready, all callbacks are processed. Finally the data communication semantics LET is defined.
#include "rcl_executor/let_executor.h"
// define subscription callback
void my_sub_cb1(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb2(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb3(const void * msgin)
{
// ...
}
// define timer callback
void my_timer_cb(rcl_timer_t * timer, int64_t last_call_time)
{
// ...
}
// necessary ROS 2 objects
rcl_context_t context;
rcl_node_t node;
rcl_subscription_t sub1, sub2, sub3;
rcl_timer_t timer;
rcle_let_executor_t exe;
// define ROS context
context = rcl_get_zero_initialized_context();
// initialize ROS node
rcl_node_init(&node, &context,...);
// create subscriptions
rcl_subscription_init(&sub1, &node, ...);
rcl_subscription_init(&sub2, &node, ...);
rcl_subscription_init(&sub3, &node, ...);
// create a timer
rcl_timer_init(&timer, &my_timer_cb, ... );
// initialize executor with four handles
rclc_executor_init(&exe, &context, 4, ...);
// define static execution order of handles
rclc_executor_add_subscription(&exe, &sub1, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sub2, &my_sub_cb2, ALWAYS);
rclc_executor_add_subscription(&exe, &sub3, &my_sub_cb3, ALWAYS);
rclc_executor_add_timer(&exe, &timer);
// trigger when handle 'timer' is ready
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &timer);
// select LET-semantics
rclc_executor_data_comm_semantics(&exe, LET);
// spin forever
rclc_executor_spin(&exe);
ROS 2 Executor Workshop Reference System
The rclc Executor has been presented at the workshop 'ROS 2 Executor: How to make it efficient, real-time and deterministic?' at ROS World 2021 (i.e. the online version of ROSCon)[S2021]. A Reference System for testing and benchmarking ROS Executors has been developed for this workshop. The application of the rclc Executor on the reference system with the trigger condition can be found in the rclc-executor branch of the Reference System.
The slides can be downloaded here. All information and the videos and slides of the other talks of the workshop can be found at www.apex.ai/roscon-21.
Future work
- Full LET semantics (writing data at the end of the period)
- one publisher that periodically publishes
- if Executors are running in multiple threads, publishing needs to be atomic
- Multi-threaded executor with assignment of scheduling policies of unerlying operating system. [Pull Request, pre-print SLD2021].
Download
The rclc Executor can be downloaded from the ros2/rclc repository. It is available for the ROS 2 versions Foxy, Galactic and Rolling. The repository provides several packages including the rclc Executor and an rclc_examples package with several application examples.
Callback-group-level Executor
The Callback-group-level Executor was an early prototype for a refined rclcpp Executor API developed in micro-ROS. It has been derived from the default rclcpp Executor and addresses some of the aforementioned deficits. Most important, it was used to validate that the underlying layers (rcl, rmw, rmw_adapter, DDS) allow for multiple Executor instances without any negative interferences.
As the default rclcpp Executor works at a node-level granularity – which is a limitation given that a node may issue different callbacks needing different real-time guarantees - we decided to refine the API for more fine-grained control over the scheduling of callbacks on the granularity of callback groups using. We leverage the callback-group concept existing in rclcpp by introducing real-time profiles such as RT-CRITICAL and BEST-EFFORT in the callback-group API (i.e. rclcpp/callback_group.hpp). Each callback needing specific real-time guarantees, when created, may therefore be associated with a dedicated callback group. With this in place, we enhanced the Executor and depending classes (e.g., for memory allocation) to operate at a finer callback-group granularity. This allows a single node to have callbacks with different real-time profiles assigned to different Executor instances - within one process.
Thus, an Executor instance can be dedicated to specific callback group(s) and the Executor’s thread(s) can be prioritized according to the real-time requirements of these groups. For example, all time-critical callbacks are handled by an "RT-CRITICAL" Executor instance running at the highest scheduler priority.
The following Figure illustrates this approach with two nodes served by three Callback-group-level Executors in one process:
The different callbacks of the Drive-Base node are distributed to different Executors (visualized by the color red, yellow and green). For example the onCmdVel and publishWheelTicks callback are scheduled by the same Executor (yellow). Callbacks from different nodes can be serviced by the same Executor.
API Changes
In this section, we describe the necessary changes to the Executor API: * include/rclcpp/callback_group.hpp:
* Introduced an enum to distinguish up to three real-time classes (requirements) per node (RealTimeCritical, SoftRealTime, BestEffort)
* Changed association with Executor instance from nodes to callback groups.
-
- Added functions to add and remove individual callback groups in addition to whole nodes.
- Replaced private vector of nodes with a map from callback groups to nodes.
-
include/rclcpp/memory_strategy.hpp
- Changed all functions that expect a vector of nodes to the just mentioned map.
-
include/rclcpp/node.hpp and include/rclcpp/node_interfaces/node_base.hpp
- Extended arguments of create_callback_group function for the real-time class.
- Removed the get_associated_with_executor_atomic function.
The callback-group-level executor has been merged into ROS 2 rclcpp in pull request 1218.
Test Bench
As a proof of concept, we implemented a small test bench in the present package cbg-executor_ping-pong_cpp. The test bench comprises a Ping node and a Pong node which exchange real-time and best-effort messages simultaneously with each other. Each class of messages is handled with a dedicated Executor, as illustrated in the following Figure.
With the test bench, we validated the functioning of the approach.
In this example, the callback for the high priority task (red line) consumes 10ms and the low priority task (blue line) 40ms in the Pong Node. With a ping rate of 20 Hz, the CPU saturates (10ms*20+40ms*20=1000ms). With higher frequencies the high priorty task can continue to send its pong message, while the low priority pong task degrades. With a frequency of 100Hz the high priority task requires 100% CPU utilization. With higher ping rates it keeps sending pong messages with 100Hz, while the low priority task does not get any CPU ressources any more and cannot send any messages.
The test bench is provided in the cbg_executor_demo.
Related Work
In this section, we provide an overview to related approaches and link to the corresponding APIs.
Fawkes Framework
Fawkes is a robotic software framework, which supports synchronization points for sense-plan-act like execution. It has been developed by RWTH Aachen since 2006. Source code is available at github.com/fawkesrobotics.
Synchronization
Fawkes provides developers different synchronization points, which are very useful for defining an execution order of a typical sense-plan-act application. These ten synchronization points (wake-up hooks) are the following (cf. libs/aspect/blocked_timing.h):
- WAKEUP_HOOK_PRE_LOOP
- WAKEUP_HOOK_SENSOR_ACQUIRE
- WAKEUP_HOOK_SENSOR_PREPARE
- WAKEUP_HOOK_SENSOR_PROCESS
- WAKEUP_HOOK_WORLDSTATE
- WAKEUP_HOOK_THINK
- WAKEUP_HOOK_SKILL
- WAKEUP_HOOK_ACT
- WAKEUP_HOOK_ACT_EXEC
- WAKEUP_HOOK_POST_LOOP
Configuration at compile time
At compile time, a desired synchronization point is defined as a constructor parameter for a module. For example, assuming that mapLaserGenThread shall be executed in SENSOR_ACQUIRE, the constructor is implemented as:
MapLaserGenThread::MapLaserGenThread()
:: Thread("MapLaserGenThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_ACQUIRE),
TransformAspect(TransformAspect::BOTH_DEFER_PUBLISHER, "Map Laser Odometry")
Similarly, if NaoQiButtonThread shall be executed in the SENSOR_PROCESS hook, the constructor is:
NaoQiButtonThread::NaoQiButtonThread()
:: Thread("NaoQiButtonThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_PROCESS)
Runtime execution
At runtime, the Executor iterates through the list of synchronization points and executes all registered threads until completion. Then, the threads of the next synchronization point are called.
A module (thread) can be configured independent of these sense-plan-act synchronization points. This has the effect, that this thread is executed in parallel to this chain.
The high level overview of the Fawkes framework is shown in the next figure. At compile-time the configuration of the sense-plan act wakeup hook is done (upper part), while at run-time the scheduler iterates through this list of wakeup-hooks (lower part):
Hence, at run-time, the hooks are executed as a fixed static schedule without preemption. Multiple threads registered in the same hook are executed in parallel.
Orthogonal to the sequential execution of sense-plan-act like applications, it is possible to define further constraints on the execution order by means of a Barrier. A barrier defines a number of threads, which need to have finished before the thread can start, which owns the barrier.
These concepts are implemented by the following main classes:
-
Wakeup hook by
SyncPointandSyncPointManager, which manages a list of synchronization points. -
Executor by the class
FawkesMainThread, which is the scheduler, responsible for calling the user threads. -
ThreadManager, which is derived fromBlockedTimingExecutor, provides the necessary API to add and remove threads to wakeup hooks as well as for sequential execution of the wakeup-hooks. -
Barrieris an object similar tocondition_variablein C++.
Discussion
All threads are executed with the same priority. If multiple sense-plan-act chains shall be executed with different priorities, e.g. to prefer execution of emergency-stop over normal operation, then this framework reaches its limits.
Also, different execution frequencies cannot be modeled by a single instance of this sense-plan-act chain. However, in robotics the fastest sensor will drive the chain and all other hooks are executed with the same frequency.
The option to execute threads independent of the predefined wakeup-hooks is very useful, e.g. for diagnostics. The concept of the Barrier is useful for satisfying functional dependencies which need to be considered in the execution order.
References
[S2021] J. Staschulat, "Micro-ROS: The rclc Executor", in Workshop ROS 2 Executor: How to make it efficient, real-time and deterministic? at ROS World, Oct. 2021, [slides] [Video]
[SLD2021] J. Staschulat, R. Lange and D. N. Dasari, "Budget-based real-time Executor for Micro-ROS", arXiv Pre-Print, May 2021. [paper]
[L2020] Ralph Lange: Advanced Execution Management with ROS 2, ROS-Industrial Conference, Dec 2020 [Slides]
[SLL2020] J. Staschulat, I. Lütkebohle and R. Lange, "The rclc Executor: Domain-specific deterministic scheduling mechanisms for ROS applications on microcontrollers: work-in-progress," 2020 International Conference on Embedded Software (EMSOFT), Singapore, Singapore, 2020, pp. 18-19. [Paper] [Video]
[CB2019] D. Casini, T. Blaß, I. Lütkebohle, B. Brandenburg: Response-Time Analysis of ROS 2 Processing Chains under Reservation-Based Scheduling, in Euromicro-Conference on Real-Time Systems 2019. [Paper] [slides]
[L2018] Ralph Lange: Callback-group-level Executor for ROS 2. Lightning talk at ROSCon 2018. Madrid, Spain. Sep 2018. [Slides] [Video]
[EK2018] R. Ernst, S. Kuntz, S. Quinton, M. Simons: The Logical Execution Time Paradigm: New Perspectives for Multicore Systems, February 25-28 2018 (Dagstuhl Seminar 18092). [Paper]
[NSP2018] A. Naderlinger, S. Resmerita, and W. Pree: LET for Legacy and Model-based Applications, Proceedings of The Logical Execution Time Paradigm: New Perspectives for Multicore Systems (Dagstuhl Seminar 18092), Wadern, Germany, February 2018.
[BP2017] A. Biondi, P. Pazzaglia, A. Balsini, M. D. Natale: Logical Execution Time Implementation and Memory Optimization Issues in AUTOSAR Applications for Multicores, International Worshop on Analysis Tools and Methodologies for Embedded and Real-Time Systems (WATERS2017), Dubrovnik, Croatia.[Paper]
[KZH2015] S. Kramer, D. Ziegenbein, and A. Hamann: Real World Automotive Benchmarks For Free, International Workshop on Analysis Tools and Methodologies for Embedded adn Real-Time Sysems (WATERS), 2015.
[HHK2001] Henzinger T.A., Horowitz B., Kirsch C.M. (2001) Giotto: A Time-Triggered Language for Embedded Programming. In: Henzinger T.A., Kirsch C.M. (eds) Embedded Software. EMSOFT 2001. Lecture Notes in Computer Science, vol 2211. Springer, Berlin, Heidelberg
[LL1973] Liu, C. L.; Layland, J.:Scheduling algorithms for multiprogramming in a hard real-time environment, Journal of the ACM, 20 (1): 46–61, 1973.
Changelog for package rclc
6.1.0 (2023-06-15)
- Data structures interfaces for multi-threaded executor (#355)
- update ros-tooling versions (#361)
- updated actions/checkout version (#367)
- updated branch names to rolling (#370)
3.0.9 (2023-03-22)
- Added build status of bloom-releases for Humble distribution (#291)
- [rolling] updated ros-tooling versions (#289)
- github action: updated os-version to ubuntu-22.04 (backport #295) (#296)
- Added documentation (#301)
- Drop build dependency on std_msgs (#314)
- Updated
and (#318) - Removed build status for Galactic in README (EOL November 2022) (#321)
- Update documentation about number_of_handles (#326)
- executor.h: Fix a few docs typos (#338)
3.0.8 (2022-04-14)
- Remove duplicate typedefs. (#249)
- Add rmw dependencies due to EventsExecutor PR in rcl (#255)
- Fix action client & server deallocation (#257)
- updated documentation: build status for Rolling (#266)
- Update action client goal callback signature (#282)
- Upgrade parameters (#274)
3.0.7 (2022-02-17)
- Fix enum naming for avoid collision (#242)
- Added dependency for package performance-test-fixture (#245)
3.0.6 (2022-01-25)
- executor ignore canceled timers (#220)
- uddated documentation README.md (#229)
- resolved error in unit test see issue #230 (#231)
- Add thread dependency to examples (Rolling) (#237) (resolves in this package only cpplint errors)
3.0.5 (2021-11-23)
- Fix data_available reset for timer (backport #215) (#217)
3.0.4 (2021-11-17)
- Ignoring unsuccessful SERVICE_TAKE (#175)
- Add rclc_parameter Quality Declaration (#144)
- use-ros2-testing (#185)
- Fix: printf in executor spin (#195)
- Fix init options handling (#202) (#205)
- Remove init options from support (#203)
- RCLC Actions Implementation (#170)
- Add rcl_action as build export dependency (#211)
3.0.3 (2021-07-28)
- Checking for valid ROS context in spin_some
- Refactoring executor (removing callback_type)
- Fixing codecov config
3.0.2 (2021-07-26)
- Updated codecov to ignore test folders
- Updated bloom release status table
3.0.1 (2021-07-17)
- Added rclc_parameter package
- Added quality of service entity creation API
- Added executor prepare API
- Added support for removing subscription from executor
- Added support for subscription with context
- Added quality declaration statement
- Updated compatability function for sleep
- Removed duplicate NOTICE files
2.0.0 (2021-04-23)
- Added codecov support
- New API of rcl_lifecycle in Rolling required major version bump
1.0.1 (2021-03-29)
- Windows port
- Compatibility sleep function (Windows, POSIX-OS)
- Fixed RCL lifecycle API change for Rolling
1.0.0 (2021-03-04)
- Service callbacks with context
- Fixed minor issues unit tests
- Upgraded setup_ros action (ci jobs)
- Removed Eloquent from ci jobs
0.1.7 (2021-01-20)
- Corrected corrupted changelog
0.1.6 (2021-01-20)
- Fixed issues due to Github Action timing delays on cloud build
- Fixed missing package dependency in Github Action for Eloquent
0.1.5 (2020-12-11)
- Added support for services,clients and guard_conditions to rclc executor
- Added table for bloom release status in README file
0.1.4 (2020-11-25)
- Fixed error in bloom release
0.1.3 (2020-11-23)
- Added rclc_lifecycle package
- Change maintainer information
- Minor fixes, updated unit tests
0.1.2 (2020-05-19)
- Fixed compiler errors for bloom release
0.1.1 (2020-05-14)
- Initial release
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Launch files
Messages
Services
Plugins
Recent questions tagged rclc at Robotics Stack Exchange
|
|
rclc package from rclc reporclc rclc_examples rclc_lifecycle rclc_parameter |
|
|
Package Summary
| Tags | No category tags. |
| Version | 6.0.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/rclc.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2023-06-23 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Jan Staschulat
- Pablo Garrido
Authors
- Jan Staschulat
- William Woodall
The rclc package
Table of contents
Introduction
Predictable execution under given real-time constraints is a crucial requirement for many robotic applications. While the service-based paradigm of ROS allows a fast integration of many different functionalities, it does not provide sufficient control over the execution management. For example, there are no mechanisms to enforce a certain execution order of callbacks within a node. Also the execution order of multiple nodes is essential for control applications in mobile robotics. Cause-effect-chains comprising of sensor acquisition, evaluation of data and actuation control should be mapped to ROS nodes executed in this order, however there are no explicit mechanisms to enforce it. Furthermore, when data recordings collected in field tests as ROS-bags are re-played, then the results are often surprisingly different due to non-determinism of process scheduling.
Manually setting up a particular execution order of subscriptions and publishing topics as well as defining use-case specific priorities of the corresponding Linux processes is always possible. However, this approach is error-prone, difficult to extend and requires an in-depth knowledge of the deployed ROS 2 packages in the system.
Therefore the goal of the Executor in micro-ROS is to support roboticists with practical and easy-to-use real-time mechanisms which provide solutions for: - Deterministic execution - Real-time guarantees - Integration of real-time and non real-time functionalities on one platform - Specific support for RTOS and microcontrollers
In ROS 1 a network thread is responsible for receiving all messages and putting them into a FIFO queue (in roscpp). That is, all callbacks were called in a FIFO manner, without any execution management. With the introduction of DDS (data distribution service) in ROS 2, the messages are buffered in DDS. In ROS 2, an Executor concept was introduced to support execution management. At the rcl-layer, a wait-set is configured with handles to be received and in a second step, the handles are taken from the DDS-queue. A handle is a generic term defined in rcl-layer for timers, subscriptions, services, clients and guard conditions.
The standard implementation of the ROS 2 Executor for the C++ API (rclcpp) has, however, certain unusual features, like precedence of timers over all other DDS handles, non-preemptive round-robin scheduling for non-timer handles and considering only one input data for each handle (even if multiple could be available). These features have the consequence, that in certain situations the standard rclcpp Executor is not deterministic and it makes guaranteeing real-time requirements very hard [CB2019]. We have not looked at the ROS 2 Executor implementation for Python Frontend (rclpy) because we consider a micro-controllers platform, on which typically C or C++ appliations will run.
Given the goals for a Real-Time Executor and the limitations of the ROS 2 standard rclcpp Executor, the challenges are: - to develop an adequate and well-defined scheduling mechanisms for the ROS 2 framework and the real-time operating system (RTOS) - to define an easy-to-use interface for ROS developers - to model requirements (like latencies, determinism in subsystems) - mapping of ROS 2 framework and operating system schedulers (semi-automated and optimized mapping is desired as well as generic, well-understood framework mechanisms)
Our approach is to provide a real-time-capable Executor for the rcl+rclc layer (as described in section Introduction to Client Library.) in the C programming language .
As the first step, we propose the rclc Executor for the rcl-layer in C programming language with several new features to support real-time and deterministic execution: It supports 1.) user-defined static sequential execution, 2) conditional execution semantics, 3) multi-threaded execution with scheduling configuration, and 4) logical execution semantics (LET). Sequential execution refers to the runtime behavior, that all callbacks are executed in a pre-defined order independent of the arrival time of messages. Conditional execution is available with a trigger condition which enables typical processing patterns in robotics (which are analyzed in detail in section Analysis of processing patterns. Configuration of scheduling parameters for multi-threaded application accomplishes prioritized execution. The logical execution time concept (LET) provides data synchronization for fixed periodic task scheduling of embedded applications.
Beyond the advanced execution management mechanisms for micro-ROS, we also contributed to improving and extending the Executor concept in rclcpp for standard ROS 2: the callback group-level Executor. It is not a new Executor but rather a refinement of the ROS 2 Executor API allowing to prioritize a group of callbacks which is not possible with the ROS 2 default Executor in its current Galactic release.
Analysis of rclcpp standard Executor
ROS 2 allows to bundle multiple nodes in one operating system process. To coordinate the execution of the callbacks of the nodes of a process, the Executor concept was introduced in rclcpp (and also in rclpy).
The ROS 2 design defines one Executor (instance of rclcpp::executor::Executor) per process, which is typically created either in a custom main function or by the launch system. The Executor coordinates the execution of all callbacks issued by these nodes by checking for available work (timers, services, messages, subscriptions, etc.) from the DDS queue and dispatching it to one or more threads, implemented in SingleThreadedExecutor and MultiThreadedExecutor, respectively.
The dispatching mechanism resembles the ROS 1 spin thread behavior: the Executor looks up the wait sets, which notifies it of any pending callback in the DDS queue. If there are multiple pending callbacks, the ROS 2 Executor executes them in an in the order as they were registered at the Executor.
Architecture
The following diagram depicts the relevant classes of the standard ROS 2 Executor implementation:
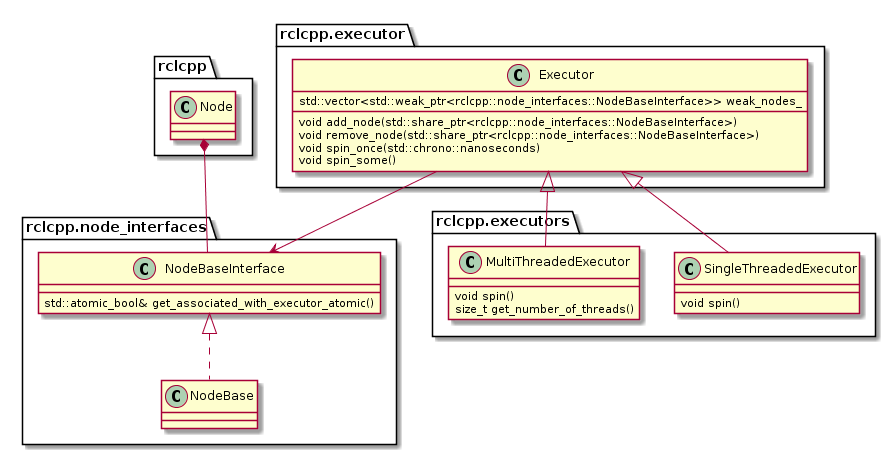
Note that an Executor instance maintains weak pointers to the NodeBaseInterfaces of the nodes only. Therefore, nodes can be destroyed safely, without notifying the Executor.
Also, the Executor does not maintain an explicit callback queue, but relies on the queue mechanism of the underlying DDS implementation as illustrated in the following sequence diagram:
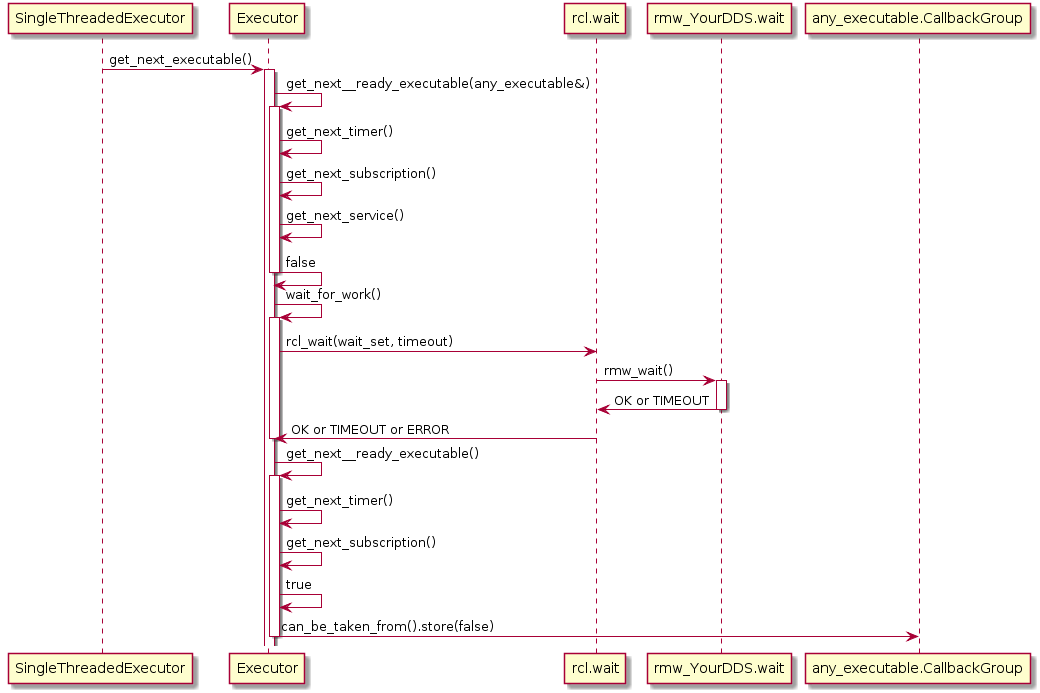
The Executor concept, however, does not provide means for prioritization or categorization of the incoming callback calls. Moreover, it does not leverage the real-time characteristics of the underlying operating-system scheduler to have finer control on the order of executions. The overall implication of this behavior is that time-critical callbacks could suffer possible deadline misses and a degraded performance since they are serviced later than non-critical callbacks. Additionally, due to the FIFO mechanism, it is difficult to determine usable bounds on the worst-case latency that each callback execution may incur.
Scheduling Semantics
In a recent paper [CB2019], the rclcpp Executor has been analyzed in detail and a response time analysis of cause-effect chains has been proposed under reservation-based scheduling. The Executor distinguishes four categories of callbacks: timers, which are triggered by system-level timers, subscribers, which are triggered by new messages on a subscribed topic, services, which are triggered by service requests, and clients, which are triggered by responses to service requests. The Executor is responsible for taking messages from the input queues of the DDS layer and executing the corresponding callback. Since it executes callbacks to completion, it is a non-preemptive scheduler, However it does not consider all ready tasks for execution, but only a snapshot, called readySet. This readySet is updated when the Executor is idle and in this step it interacts with the DDS layer updating the set of ready tasks. Then for every type of task, there are dedicated queues (timers, subscriptions, services, clients) which are processed sequentially. The following undesired properties were pointed out:
- Timers have the highest priority. The Executor processes timers always first. This can lead to the intrinsic effect, that in overload situations messages from the DDS queue are not processed.
- Non-preemptive round-robin scheduling of non-timer handles. Messages arriving during the processing of the readySet are not considered until the next update, which depends on the execution time of all remaining callbacks. This leads to priority inversion, as lower-priority callbacks may implicitly block higher-priority callbacks by prolonging the current processing of the readySet.
- Only one message per handle is considered. The readySet contains only one task instance, For example, even if multiple messages of the same topic are available, only one instance is processed until the Executor is idle again and the readySet is updated from the DDS layer. This aggravates priority inversion, as a backlogged callback might have to wait for multiple processing of readySets until it is considered for scheduling. This means that non-timer callback instances might be blocked by multiple instances of the same lower-priority callback.
Due to these findings, the authors present an alternative approach to provide determinism and to apply well-known schedulability analyses to a ROS 2 systems. A response time analysis is described under reservation-based scheduling.
Analysis of processing patterns
The development of an execution management mechanism for micro-ROS is based on an analysis of processing patterns commonly used in robotics and embedded systems. First, typical processing patterns in mobile robotics are presented which are used to implement deterministic behavior. Then, the processing patterns in the real-time embedded systems are analyzed, in which, as a main difference, the time-triggered paradigm is applied to accomplish real-time behavior.
Sense-plan-act pipeline in robotics
Now we describe common software design patterns which are used in mobile robotics to achieve deterministic behavior. For each design pattern we describe the concept and the derived requirements for a deterministic Executor.
Concept:
A common design paradigm in mobile robotics is a control loop, consisting of several phases: A sensing phase to aquire sensor data, a plan phase for localization and path planning and an actuation-phase to steer the mobile robot. Of course, more phases are possible, here these three phases shall serve as an example. Such a processing pipeline is shown in Figure 1.

Typically multiple sensors are used to perceive the environment. For example an IMU and a laser scanner. The quality of localization algorithms highly depend on how old such sensor data is when it is processed. Ideally the latest data of all sensors should be processed. One way to achive this is to execute first all sensor drivers in the sense-phase and then process all algorithms in the plan-phase.
Currently, such a processing order cannot be defined with the default Executor of rclcpp. One could in principle design a data-driven pipeline, however if e.g. the Laser scan is needed by some other callback in the sense-phase as well as in the plan-phase, the processing order of these subscribers is arbitrary.
For this sense-plan-act pattern, we could define one executor for each phase. The plan-phase would be triggered only when all callbacks in the sense-phase have finished.
Derived requirements: - triggered execution
Synchronization of multiple rates
Concept:
Often multiple sensors are being used to sense the environment for mobile robotics. While an IMU sensor provides data samples at a very high rate (e.g., 500 Hz), laser scans are availabe at a much slower frequency (e.g. 10Hz) determined by the revolution time. Then the challenge is, how to deterministically fuse sensor data with different frequencies. This problem is depicted in Figure 2.
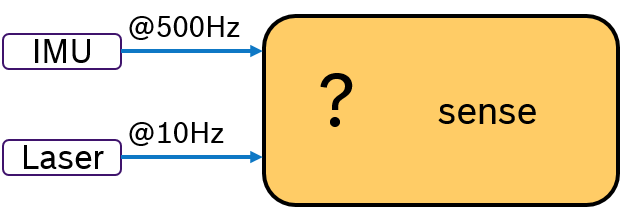
Due to scheduling effects, the callback for evaluating the laser scan might be called just before or just after an IMU data is received. One way to tackle this is to write additional synchronization code inside the application. Obviously, this is a cumbersome and not-portable solution.
An Alternative would be to evalute the IMU sample and the laser scan by synchronizing their frequency. For example by processing always 50 IMU samples with one laser scan. This approach is shown in Figure 3. A pre-processing callback aggregates the IMU samples and sends an aggregated message with 50 samples at 10Hz rate. Now both messages have the same frequency. With a trigger condition, which fires when both messages are available, the sensor fusion algorithm can expect always synchronized input data.
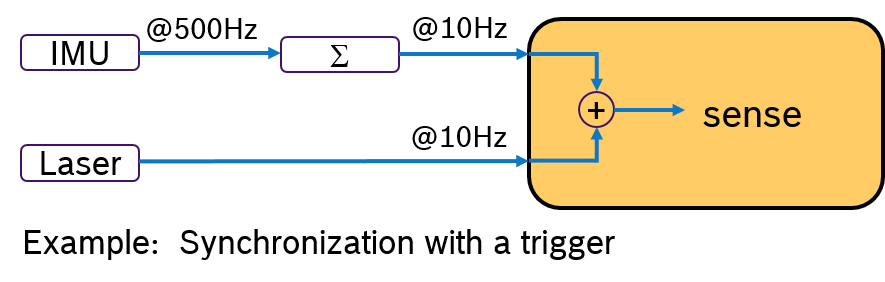
In ROS 2, this is currently not possible to be modeled because of the lack of a trigger concept in the Executors of rclcpp and rclpy. Message filters could be used to synchronize input data based on the timestamp in the header, but this is only available in rclcpp (and not in rcl). Further more, it would be more efficient to have such a trigger concept directly in the Executor.
Another idea would be to activly request for IMU data only when a laser scan is received. This concept is shown in Figure 4. Upon arrival of a laser scan mesage, first, a message with aggregated IMU samples is requested. Then, the laser scan is processed and later the sensor fusion algorithm. An Executor, which would support sequential execution of callbacks, could realize this idea.
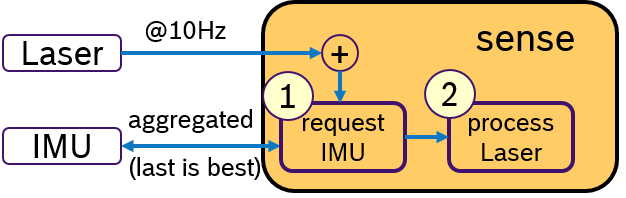
Derived requirements: - triggered execution - sequential procesing of callbacks
High-priority processing path
Concept Often a robot has to fullfill several activities at the same time. For example following a path and avoiding obstacles. While path following is a permanent activity, obstacle avoidance is trigged by the environment and should be immediately reacted upon. Therefore one would like to specify priorities to activities. This is depicted in Figure 5:
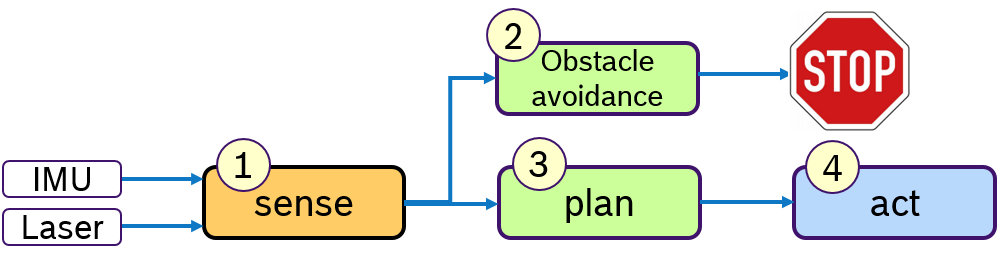
Assuming a simplified control loop with the activities sense-plan-act, the obstacle avoidance, which might temporarily stop the robot, should be processed before the planning phase. In this example we assume that these activites are processed in one thread.
Derived requirements: - sequential processing of callbacks
Real-time embedded applications
In embedded systems, real-time behavior is approached by using the time-triggered paradigm, which means that the processes are periodically activated. Processes can be assigned priorities to allow pre-emptions. Figure 6 shows an example, in which three processes with fixed periods are shown. The middle and lower process are preempted multiple times depicted with empty dashed boxes.
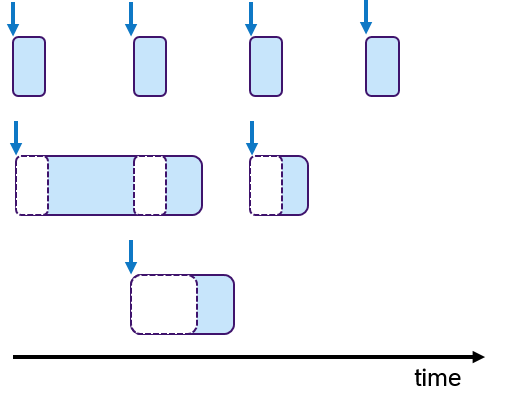
To each process one or multiple tasks can be assigned, as shown in Figure 7. These tasks are executed sequentially, which is often called cooperative scheduling.
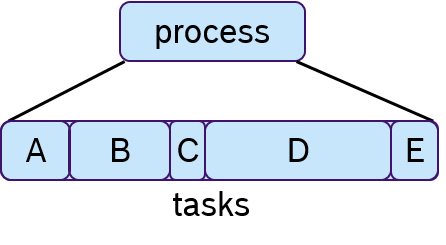
While there are different ways to assign priorities to a given number of processes, the rate-monotonic scheduling assignment, in which processes with a shorter period have a higher priority, has been shown optimal if the processor utilization is less than 69% [LL1973].
In the last decades many different scheduling approaches have been presented, however fixed-periodic preemptive scheduling is still widely used in embedded real-time systems [KZH2015]. This becomes also obvious, when looking at the features of current operating systems. Like Linux, real-time operating systems, such as NuttX, Zephyr, FreeRTOS, QNX etc., support fixed-periodic preemptive scheduling and the assignment of priorities, which makes the time-triggered paradigm the dominant design principle in this domain.
However, data consistency is often an issue when preemptive scheduling is used and if data is being shared across multiple processes via global variables. Due to scheduling effects and varying execution times of processes, writing and reading these variables could occur sometimes sooner or later. This results in an latency jitter of update times (the timepoint at which a variable change becomes visible to other processes). Race conditions can occur when multiple processes access a variable at the same time. So solve this problem, the concept of logical-execution time (LET) was introduced in [HHK2001], in which communication of data occurs only at pre-defined periodic time instances: Reading data only at the beginning of the period and writing data only at the end of the period. The cost of an additional latency delay is traded for data consistency and reduced jitter. This concept has also recently been applied to automotive applications[NSP2018].
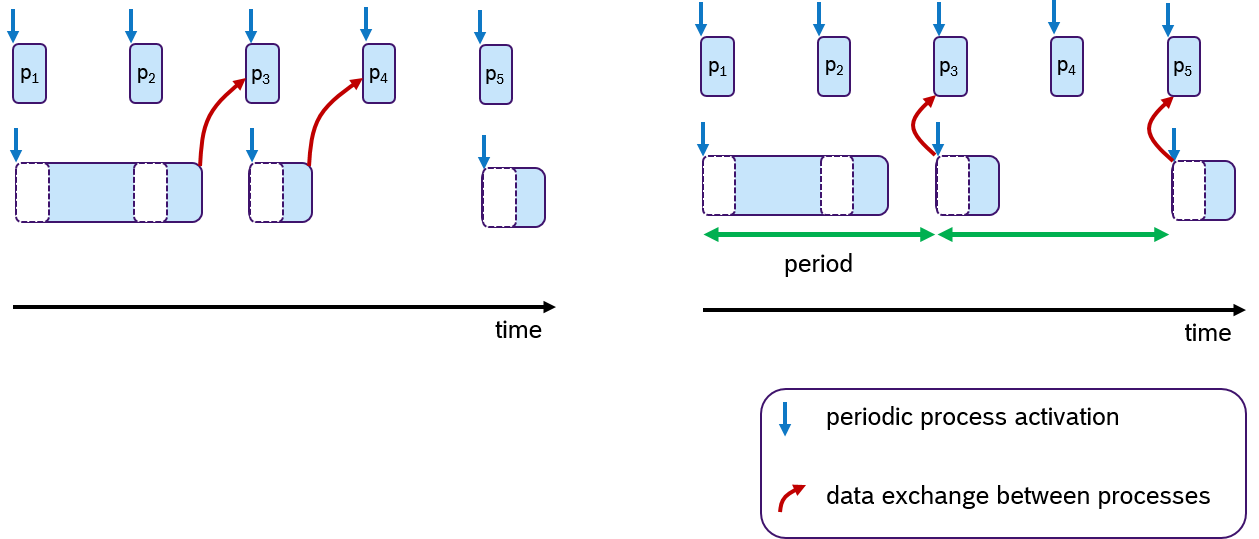
An Example of the LET concept is shown in Figure 8. Assume that two processes are communicating data via one global variable. The timepoint when this data is written is at the end of the processing time. In the default case (left side), the process p3 and p4 receive the update. At the right side of Figure 8, the same scenario is shown with LET semantics. Here, the data is communicated only at period boundaries. In this case, the lower process communicates at the end of the period, so that always process p3 and p5 receive the new data.
Concept: - periodic execution of processes - assignment of fixed priorities to processes - preemptive scheduling of processes - co-operative scheduling of tasks within a process (sequential execution) - data synchronization with LET-semantics
While periodic activation is possible in ROS 2 by using timers, preemptive scheduling is supported by the operating system and assigning priorities on the granularity of threads/processes that correspond to the ROS nodes; it is not possible to sequentially execute callbacks, which have no data-dependency. Furthermore data is read from the DDS queue just before the callback is executed and data is written sometime during the time the application is executed. While the spin_period function of the rclcpp Executor allows to check for data at a fixed period and executing those callbacks for which data is available, however, with this spin-function does not execute all callbacks irrespective wheter data is available or not. So spin_period is not helpful to periodically execute a number of callbacks (aka tasks within a process). So we need a mechanism that triggers the execution of multiple callbacks (aka tasks) based on a timer. Data transmission is achieved via DDS which does not allow to implement a LET-semantics. To summarize, we derive the following requirements.
Derived requirements: - trigger the execution - sequential processing of callbacks - data synchronization with LET semantics
rclc Executor
The rclc Executor is a ROS 2 Executor based on the rcl-layer in C programming language. As discussed above, the default rclcpp Executor is not suitable to implement real-time applications because of three main reasons: timers are preferred over all other handles, no priorization of callback execution and the round-robin to completion execution of callbacks. On the other hand, several processing patterns have been developed as best practices to achieve non-functional requirements, such as bounded end-to-end latencies, low jitter of response times of cause-effect chains, deterministic processing and short response times even in overload situations. These processing patterns are difficult to implement with the concepts availabe in the default ROS 2 Executor, therefore we have developed a flexible Executor: the rclc Executor.
Features
The rclc Executor is feature-complete, i.e. it supports all event types as the default ROS 2 Executor, which are: - subscriptions - timers - services - clients - guard conditions - actions - lifecycle
The flexible rclc Executor provides on top the following new features: - triggered execution - user-defined sequential execution - multi-threading and scheduling configuration (WIP) - LET-semantics for data synchronization of periodic process scheduling
First, a trigger condition allows to define when the processing of a callback shall start. This is useful to implement sense-plan-act control loops or more complex processing structures with directed acyclic graphs. Second, a user can specify the processing order in which these callbacks will be executed. With this feature, the pattern of sensor fusion with multiple rates, in which data is requested from a sensor based on the arrival of some other sensor, can be easily implemented. Third, the assignment of scheduling parameters (e.g., priorities) of the underlying operating system. With this feature, prioritized processing can be implemented. Finally, for periodic applications, the LET Semantics has been implemented to support data consistency for periodic process scheduling. These features are now described in more detail.
Sequential execution
- At configuration, the user defines the order of handles.
- At configuration, the user defines whether the handle shall be called only when new data is available (ON_NEW_DATA) or whether the callback shall always be called (ALWAYS).
- At runtime, all handles are processed in the user-defined order
- if the configuration of handle is ON_NEW_DATA, then the corresponding callback is only called if new data is available
- if the configuration of the handle is ALWAYS, then the corresponding callback is always. If no data is available, then the callback is called with no data (e.g. NULL pointer).
Figure 9 shows three callbacks, A, B and C. Assume, they shall be executed in the order B,A,C. Then the user adds the callbacks to the rclc Executor in this order. Whenever new messages have arrived then the callbacks for which a new message is availabe will be always executed in the user-defined processing order.
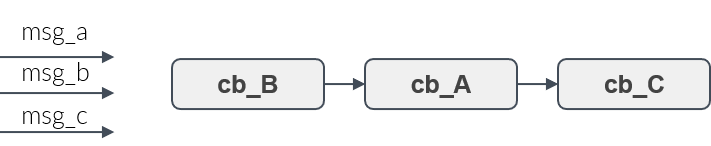
Trigger condition
- Given a set of handles, a trigger condition, which is based on the availability of input data of these handles, decides when the processing of all callbacks starts. This is shown in Figure 10.
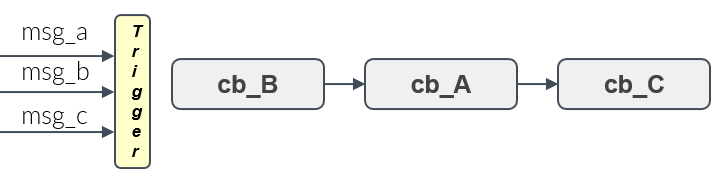
- Available options:
- ALL operation: fires when input data is available for all handles
- ANY operation: fires when input data is available for at least one handle (OR semantics)
- ONE: fires when input data for a user-specified handle is available
- User-defined function: user can implement custom logic
Figure 11 shows an example of the ALL semantics. Only if all messages msg_A, msg_B, msg_C were received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order.
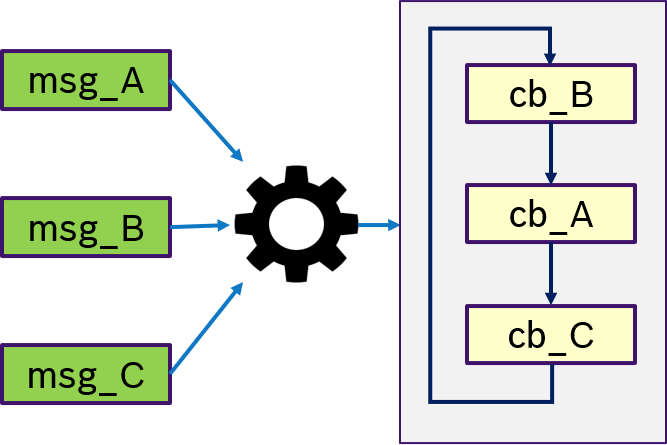
Figure 12 shows an example of the ANY semantics. Thas is, if any messages msg_A, msg_B, msg_C was received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order. This is equivalent to OR semantics.
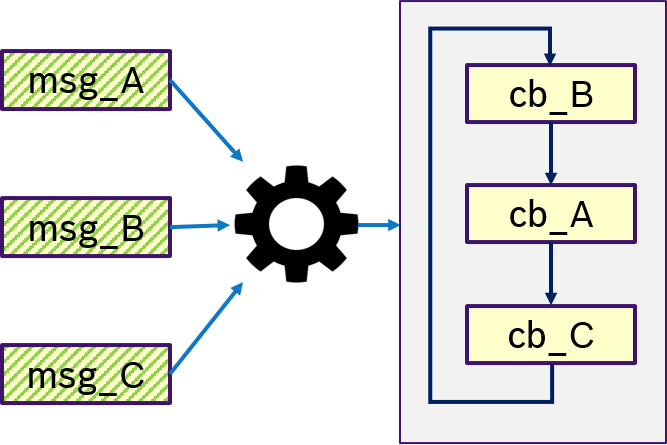
Figure 13 shows an example of the ONE semantics. Thas is, only if message msg_B was received, the trigger condition is fullfilled and (potentially all) callbacks are processed in a user-defined order.
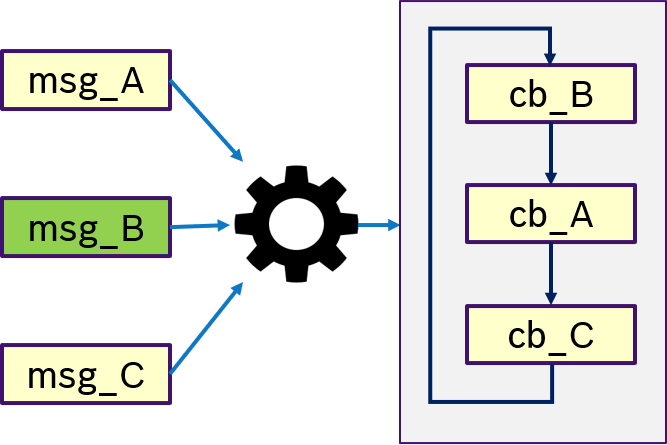
Figure 14 describes the custom semantics. A custom trigger condition with could be a more complex logic of multiple messages, can be passed to the executor. This might also include hardware triggers, like interrupts.
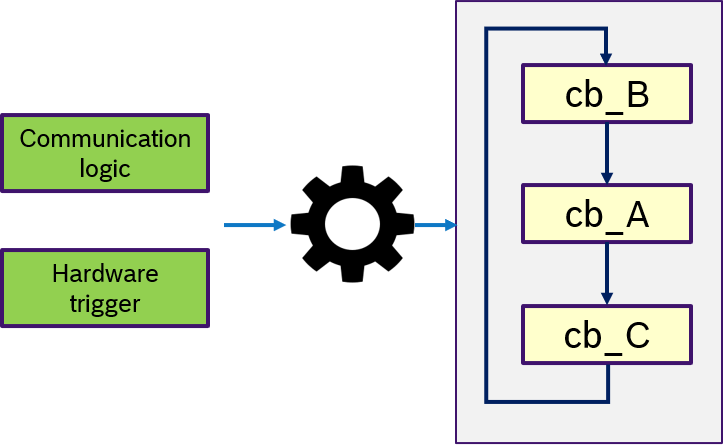
LET-Semantics
- Assumption: time-triggered system, the executor is activated periodically
- When the trigger fires, reads all input data and makes a local copy
- Processes all callbacks in sequential order
- Write output data at the end of the executor's period (Note: this is not implemented yet)
Additionally we have implemented the current rclcpp Executor semantics ("RCLCPP"): - waiting for new data for all handles (rcl_wait) - using trigger condition ANY - if trigger fires, start processing handles in pre-defined sequential order - request from DDS-queue the new data just before the handle is executed (rcl_take)
The selection of the Executor semantics is optional. The default semantics is "RCLCPP".
Multi-threading and scheduling configuration
The rclc Executor has been extended for multi-threading. It supports the assignment of scheduling policies, like priorities or more advanced scheduling algorithms as reservation-based scheduling, to subscription callbacks. [Pull Request, Pre-print SLD2021]. The overall architecture is shown in Figure 15. One Executor thread is responsible for checking for new data from the DDS queue. For every callback, a thread is spawned with the dedicted scheduling policy provided by the operating system. The Executor then dispatches new data of a subscription to it's corresponding callback function, which is then executed in its own thread by operating system.
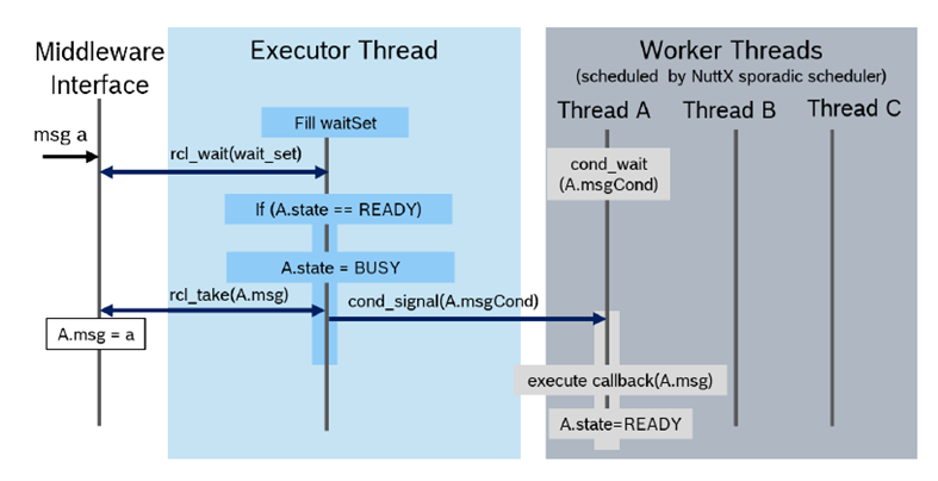
Executor API
The API of the rclc Executor can be divided in two phases: Configuration and Running.
Configuration phase
During the configuration phase, the user shall define: - the total number of callbacks - the sequence of the callbacks - trigger condition (optional, default: ANY) - data communcation semantics (optional, default ROS2)
As the Executor is intended for embedded controllers, dynamic memory management is crucial. Therefore at initialization of the rclc Executor, the user defines the total number of callbacks. The necessary dynamic memory will be allocated only in this phase and no more memory in the running phase. This makes this Executor static in the sense, that during runtime no additional callbacks can be added.
Also in the XRCE-DDS middleware the maximum number of handles need to be configured. See Memory Management Tutorial for the defaults and configuration of the colcon.meta configuration file. To make sure that the changes were applied, you can check the defined values in the following library include file: build/rmw_microxrcedds/include/rmw_microxrcedds_c/config.h.
Then, the user adds handles and the corresponding callbacks (e.g. for subscriptions and timers) to the Executor. The order in which this takes place, defines later the sequential processing order during runtime.
For each handle the user can specify, if the callback shall be executed only if new data is available (ON_NEW_DATA) or if the callback shall always be executed (ALWAYS). The second option is useful when the callback is expected to be called at a fixed rate.
The trigger condition defines when the processing of these callbacks shall start. For convenience some default conditions have been defined:
- trigger_any(default) : start executing if any callback has new data
- trigger_all : start executing if all callbacks have new data
- trigger_one(&data) : start executing if data has been received
- user_defined_function: the user can also define its own function with more complex logic
With 'trigger_any' being the default, the current semantics of the rclcpp Executor is selected.
The data communication semantics can be - ROS2 (default) - LET
To be compatible with ROS2 rclcpp Executor, the existing rclcpp semantics is implemented as 'ROS2'. That is, with the spin-function the DDS-queue is constantly monitored for new data (rcl_wait). If new data becomes available, then is fetched from DDS (rcl_take) immediately before the callback is executed. All callbacks are processed in the user-defined order, this is the only difference to the rclcpp Executor, in which no order can be specified.
Secondly, the LET semantics is implemented such that at the beginning of processing all available data is fetched (rcl_take) and buffered and then the callbacks are processed in the pre-defined operating on the buffered copy.
Running phase
As the main functionality, the Executor has a spin-function which constantly checks for new data at the DDS-queue, like the rclcpp Executor in ROS2. If the trigger condition is satisfied then all available data from the DDS queue is processed according to the specified semantics (ROS or LET) in the user-defined sequential order. After all callbacks have been processed the DDS is checked for new data again.
Available spin functions are
- spin_some - spin one time
- spin_period - spin with a period
- spin - spin indefinitly
Examples
We provide the relevant code snippets how to setup the rclc Executor for the processing patterns as described above.
Sense-plan-act pipeline in robotics example
In this example we want to realise a sense-plan-act pipeline in a single thread. The trigger condition is demonstrated by activating
the sense-phase when both data for the Laser and IMU are available. Three executors are necessary exe_sense, exe_plan and exe_act. The two sensor acquisition callbacks sense_Laser and sense_IMU are registered in the Executor exe_sense.
The trigger condition ALL is responsible to activate the sense-phase only when all data for these two callbacks are available. Finally all three Executors are spinning using a while-loop and the spin_some function.
The definitions of callbacks are omitted.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act;
rcle_let_executor_t exe_sense, exe_plan, exe_act;
// initialize executors
rclc_executor_init(&exe_sense, &context, 2, ...);
rclc_executor_init(&exe_plan, &context, 1, ...);
rclc_executor_init(&exe_act, &context, 1, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb1, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb2, ON_NEW_DATA);
rclc_let_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// executor for plan-phase
rclc_executor_add_subscription(&exe_plan, &plan, &my_sub_cb3, ON_NEW_DATA);
// executor for act-phase
rclc_executor_add_subscription(&exe_act, &act, &my_sub_cb4, ON_NEW_DATA);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_sense);
rclc_executor_spin_some(&exe_plan);
rclc_executor_spin_some(&exe_act);
}
Synchronization of multiple rates example
The sensor fusion synchronizing the multiple rates with a trigger is shown below.
...
rcl_subscription_t aggr_IMU, sense_Laser, sense_IMU;
rcle_let_executor_t exe_aggr, exe_sense;
// initialize executors
rclc_executor_init(&exe_aggr, &context, 1, ...);
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for aggregate IMU data
rclc_executor_add_subscription(&exe_aggr, &aggr_IMU, &my_sub_cb1, ON_NEW_DATA);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb3, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_aggr);
rclc_executor_spin_some(&exe_sense);
}
The setup for the sensor fusion using sequential execution is shown below.
Note that the sequetial order is sense_IMU, which will request the aggregated IMU message, and then sense_Laser
while the trigger will fire, when a laser message is received.
...
rcl_subscription_t sense_Laser, sense_IMU;
rcle_let_executor_t exe_sense;
// initialize executor
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe_sense);
High priority processing path example
This example shows the sequential processing order to execute the obstacle avoidance obst_avoid
after the callbacks of the sense-phase and before the callback of the planning phase plan.
The control loop is started when a laser message is received. Then an aggregated IMU message is requested,
like in the example above. Then all the other callbacks are always executed. This assumes that these callbacks
communicate via a global data structure. Race conditions cannot occur, because the callbacks
run all in one thread.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act, obst_avoid;
rcle_let_executor_t exe;
// initialize executors
rclc_executor_init(&exe, &context, 5, ...);
// define processing order
rclc_executor_add_subscription(&exe, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe, &obst_avoid, &my_sub_cb3, ALWAYS);
rclc_executor_add_subscription(&exe, &plan, &my_sub_cb4, ALWAYS);
rclc_executor_add_subscription(&exe, &act, &my_sub_cb5, ALWAYS);
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe);
Real-time embedded applications example
With seqential execution the co-operative scheduling of tasks within a process can be modeled. The trigger condition is used to periodically activate the process which will then execute all callbacks in a pre-defined order. Data will be communicated using the LET-semantics. Every Executor is executed in its own tread, to which an appropriate priority can be assigned.
In the following example, the Executor is setup with 4 handles. We assume a process has three subscriptions sub1, sub2, sub3. The sequential processing order is given by the order as they are added to the Executor. A timer timer defines the period. The trigger_one with the paramter timer is used, so that whenever the timer is ready, all callbacks are processed. Finally the data communication semantics LET is defined.
#include "rcl_executor/let_executor.h"
// define subscription callback
void my_sub_cb1(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb2(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb3(const void * msgin)
{
// ...
}
// define timer callback
void my_timer_cb(rcl_timer_t * timer, int64_t last_call_time)
{
// ...
}
// necessary ROS 2 objects
rcl_context_t context;
rcl_node_t node;
rcl_subscription_t sub1, sub2, sub3;
rcl_timer_t timer;
rcle_let_executor_t exe;
// define ROS context
context = rcl_get_zero_initialized_context();
// initialize ROS node
rcl_node_init(&node, &context,...);
// create subscriptions
rcl_subscription_init(&sub1, &node, ...);
rcl_subscription_init(&sub2, &node, ...);
rcl_subscription_init(&sub3, &node, ...);
// create a timer
rcl_timer_init(&timer, &my_timer_cb, ... );
// initialize executor with four handles
rclc_executor_init(&exe, &context, 4, ...);
// define static execution order of handles
rclc_executor_add_subscription(&exe, &sub1, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sub2, &my_sub_cb2, ALWAYS);
rclc_executor_add_subscription(&exe, &sub3, &my_sub_cb3, ALWAYS);
rclc_executor_add_timer(&exe, &timer);
// trigger when handle 'timer' is ready
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &timer);
// select LET-semantics
rclc_executor_data_comm_semantics(&exe, LET);
// spin forever
rclc_executor_spin(&exe);
ROS 2 Executor Workshop Reference System
The rclc Executor has been presented at the workshop 'ROS 2 Executor: How to make it efficient, real-time and deterministic?' at ROS World 2021 (i.e. the online version of ROSCon)[S2021]. A Reference System for testing and benchmarking ROS Executors has been developed for this workshop. The application of the rclc Executor on the reference system with the trigger condition can be found in the rclc-executor branch of the Reference System.
The slides can be downloaded here. All information and the videos and slides of the other talks of the workshop can be found at www.apex.ai/roscon-21.
Future work
- Full LET semantics (writing data at the end of the period)
- one publisher that periodically publishes
- if Executors are running in multiple threads, publishing needs to be atomic
- Multi-threaded executor with assignment of scheduling policies of unerlying operating system. [Pull Request, pre-print SLD2021].
Download
The rclc Executor can be downloaded from the ros2/rclc repository. It is available for the ROS 2 versions Foxy, Galactic and Rolling. The repository provides several packages including the rclc Executor and an rclc_examples package with several application examples.
Callback-group-level Executor
The Callback-group-level Executor was an early prototype for a refined rclcpp Executor API developed in micro-ROS. It has been derived from the default rclcpp Executor and addresses some of the aforementioned deficits. Most important, it was used to validate that the underlying layers (rcl, rmw, rmw_adapter, DDS) allow for multiple Executor instances without any negative interferences.
As the default rclcpp Executor works at a node-level granularity – which is a limitation given that a node may issue different callbacks needing different real-time guarantees - we decided to refine the API for more fine-grained control over the scheduling of callbacks on the granularity of callback groups using. We leverage the callback-group concept existing in rclcpp by introducing real-time profiles such as RT-CRITICAL and BEST-EFFORT in the callback-group API (i.e. rclcpp/callback_group.hpp). Each callback needing specific real-time guarantees, when created, may therefore be associated with a dedicated callback group. With this in place, we enhanced the Executor and depending classes (e.g., for memory allocation) to operate at a finer callback-group granularity. This allows a single node to have callbacks with different real-time profiles assigned to different Executor instances - within one process.
Thus, an Executor instance can be dedicated to specific callback group(s) and the Executor’s thread(s) can be prioritized according to the real-time requirements of these groups. For example, all time-critical callbacks are handled by an "RT-CRITICAL" Executor instance running at the highest scheduler priority.
The following Figure illustrates this approach with two nodes served by three Callback-group-level Executors in one process:
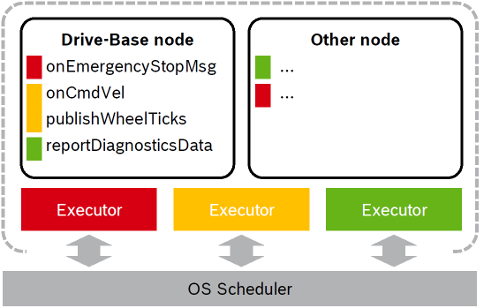
The different callbacks of the Drive-Base node are distributed to different Executors (visualized by the color red, yellow and green). For example the onCmdVel and publishWheelTicks callback are scheduled by the same Executor (yellow). Callbacks from different nodes can be serviced by the same Executor.
API Changes
In this section, we describe the necessary changes to the Executor API: * include/rclcpp/callback_group.hpp:
* Introduced an enum to distinguish up to three real-time classes (requirements) per node (RealTimeCritical, SoftRealTime, BestEffort)
* Changed association with Executor instance from nodes to callback groups.
-
- Added functions to add and remove individual callback groups in addition to whole nodes.
- Replaced private vector of nodes with a map from callback groups to nodes.
-
include/rclcpp/memory_strategy.hpp
- Changed all functions that expect a vector of nodes to the just mentioned map.
-
include/rclcpp/node.hpp and include/rclcpp/node_interfaces/node_base.hpp
- Extended arguments of create_callback_group function for the real-time class.
- Removed the get_associated_with_executor_atomic function.
The callback-group-level executor has been merged into ROS 2 rclcpp in pull request 1218.
Test Bench
As a proof of concept, we implemented a small test bench in the present package cbg-executor_ping-pong_cpp. The test bench comprises a Ping node and a Pong node which exchange real-time and best-effort messages simultaneously with each other. Each class of messages is handled with a dedicated Executor, as illustrated in the following Figure.
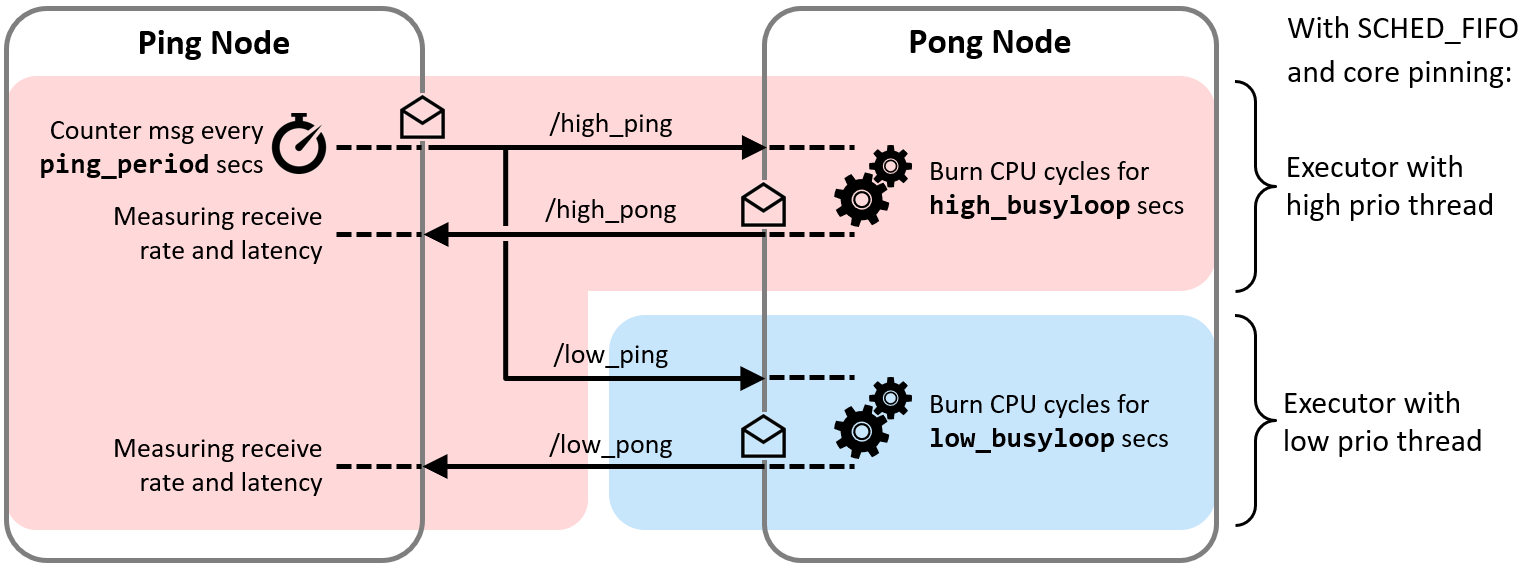
With the test bench, we validated the functioning of the approach.
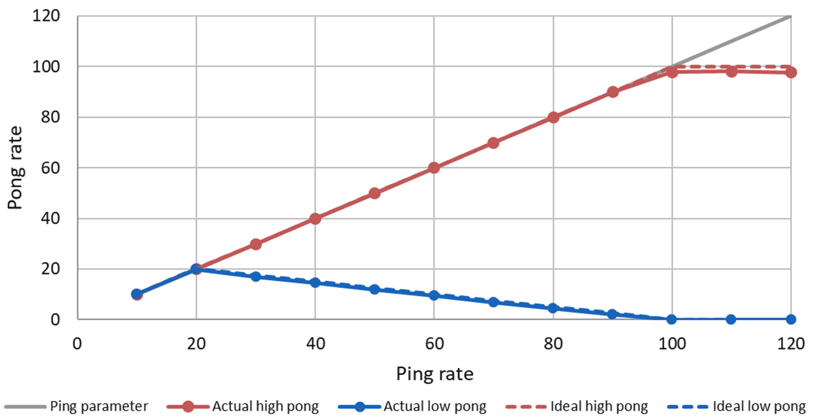
In this example, the callback for the high priority task (red line) consumes 10ms and the low priority task (blue line) 40ms in the Pong Node. With a ping rate of 20 Hz, the CPU saturates (10ms*20+40ms*20=1000ms). With higher frequencies the high priorty task can continue to send its pong message, while the low priority pong task degrades. With a frequency of 100Hz the high priority task requires 100% CPU utilization. With higher ping rates it keeps sending pong messages with 100Hz, while the low priority task does not get any CPU ressources any more and cannot send any messages.
The test bench is provided in the cbg_executor_demo.
Related Work
In this section, we provide an overview to related approaches and link to the corresponding APIs.
Fawkes Framework
Fawkes is a robotic software framework, which supports synchronization points for sense-plan-act like execution. It has been developed by RWTH Aachen since 2006. Source code is available at github.com/fawkesrobotics.
Synchronization
Fawkes provides developers different synchronization points, which are very useful for defining an execution order of a typical sense-plan-act application. These ten synchronization points (wake-up hooks) are the following (cf. libs/aspect/blocked_timing.h):
- WAKEUP_HOOK_PRE_LOOP
- WAKEUP_HOOK_SENSOR_ACQUIRE
- WAKEUP_HOOK_SENSOR_PREPARE
- WAKEUP_HOOK_SENSOR_PROCESS
- WAKEUP_HOOK_WORLDSTATE
- WAKEUP_HOOK_THINK
- WAKEUP_HOOK_SKILL
- WAKEUP_HOOK_ACT
- WAKEUP_HOOK_ACT_EXEC
- WAKEUP_HOOK_POST_LOOP
Configuration at compile time
At compile time, a desired synchronization point is defined as a constructor parameter for a module. For example, assuming that mapLaserGenThread shall be executed in SENSOR_ACQUIRE, the constructor is implemented as:
MapLaserGenThread::MapLaserGenThread()
:: Thread("MapLaserGenThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_ACQUIRE),
TransformAspect(TransformAspect::BOTH_DEFER_PUBLISHER, "Map Laser Odometry")
Similarly, if NaoQiButtonThread shall be executed in the SENSOR_PROCESS hook, the constructor is:
NaoQiButtonThread::NaoQiButtonThread()
:: Thread("NaoQiButtonThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_PROCESS)
Runtime execution
At runtime, the Executor iterates through the list of synchronization points and executes all registered threads until completion. Then, the threads of the next synchronization point are called.
A module (thread) can be configured independent of these sense-plan-act synchronization points. This has the effect, that this thread is executed in parallel to this chain.
The high level overview of the Fawkes framework is shown in the next figure. At compile-time the configuration of the sense-plan act wakeup hook is done (upper part), while at run-time the scheduler iterates through this list of wakeup-hooks (lower part):
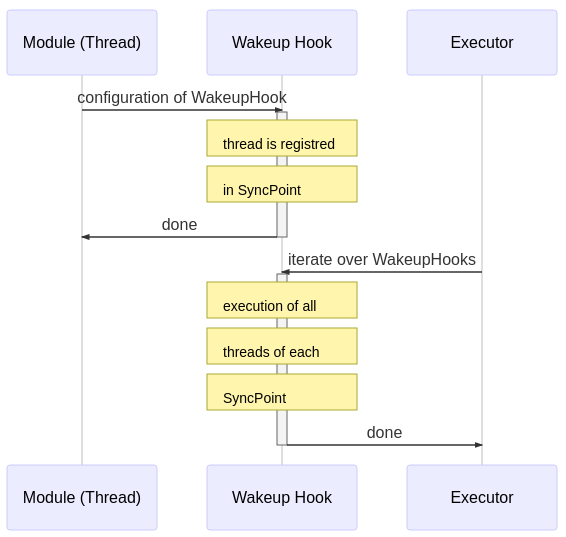
Hence, at run-time, the hooks are executed as a fixed static schedule without preemption. Multiple threads registered in the same hook are executed in parallel.
Orthogonal to the sequential execution of sense-plan-act like applications, it is possible to define further constraints on the execution order by means of a Barrier. A barrier defines a number of threads, which need to have finished before the thread can start, which owns the barrier.
These concepts are implemented by the following main classes:
-
Wakeup hook by
SyncPointandSyncPointManager, which manages a list of synchronization points. -
Executor by the class
FawkesMainThread, which is the scheduler, responsible for calling the user threads. -
ThreadManager, which is derived fromBlockedTimingExecutor, provides the necessary API to add and remove threads to wakeup hooks as well as for sequential execution of the wakeup-hooks. -
Barrieris an object similar tocondition_variablein C++.
Discussion
All threads are executed with the same priority. If multiple sense-plan-act chains shall be executed with different priorities, e.g. to prefer execution of emergency-stop over normal operation, then this framework reaches its limits.
Also, different execution frequencies cannot be modeled by a single instance of this sense-plan-act chain. However, in robotics the fastest sensor will drive the chain and all other hooks are executed with the same frequency.
The option to execute threads independent of the predefined wakeup-hooks is very useful, e.g. for diagnostics. The concept of the Barrier is useful for satisfying functional dependencies which need to be considered in the execution order.
References
[S2021] J. Staschulat, "Micro-ROS: The rclc Executor", in Workshop ROS 2 Executor: How to make it efficient, real-time and deterministic? at ROS World, Oct. 2021, [slides] [Video]
[SLD2021] J. Staschulat, R. Lange and D. N. Dasari, "Budget-based real-time Executor for Micro-ROS", arXiv Pre-Print, May 2021. [paper]
[L2020] Ralph Lange: Advanced Execution Management with ROS 2, ROS-Industrial Conference, Dec 2020 [Slides]
[SLL2020] J. Staschulat, I. Lütkebohle and R. Lange, "The rclc Executor: Domain-specific deterministic scheduling mechanisms for ROS applications on microcontrollers: work-in-progress," 2020 International Conference on Embedded Software (EMSOFT), Singapore, Singapore, 2020, pp. 18-19. [Paper] [Video]
[CB2019] D. Casini, T. Blaß, I. Lütkebohle, B. Brandenburg: Response-Time Analysis of ROS 2 Processing Chains under Reservation-Based Scheduling, in Euromicro-Conference on Real-Time Systems 2019. [Paper] [slides]
[L2018] Ralph Lange: Callback-group-level Executor for ROS 2. Lightning talk at ROSCon 2018. Madrid, Spain. Sep 2018. [Slides] [Video]
[EK2018] R. Ernst, S. Kuntz, S. Quinton, M. Simons: The Logical Execution Time Paradigm: New Perspectives for Multicore Systems, February 25-28 2018 (Dagstuhl Seminar 18092). [Paper]
[NSP2018] A. Naderlinger, S. Resmerita, and W. Pree: LET for Legacy and Model-based Applications, Proceedings of The Logical Execution Time Paradigm: New Perspectives for Multicore Systems (Dagstuhl Seminar 18092), Wadern, Germany, February 2018.
[BP2017] A. Biondi, P. Pazzaglia, A. Balsini, M. D. Natale: Logical Execution Time Implementation and Memory Optimization Issues in AUTOSAR Applications for Multicores, International Worshop on Analysis Tools and Methodologies for Embedded and Real-Time Systems (WATERS2017), Dubrovnik, Croatia.[Paper]
[KZH2015] S. Kramer, D. Ziegenbein, and A. Hamann: Real World Automotive Benchmarks For Free, International Workshop on Analysis Tools and Methodologies for Embedded adn Real-Time Sysems (WATERS), 2015.
[HHK2001] Henzinger T.A., Horowitz B., Kirsch C.M. (2001) Giotto: A Time-Triggered Language for Embedded Programming. In: Henzinger T.A., Kirsch C.M. (eds) Embedded Software. EMSOFT 2001. Lecture Notes in Computer Science, vol 2211. Springer, Berlin, Heidelberg
[LL1973] Liu, C. L.; Layland, J.:Scheduling algorithms for multiprogramming in a hard real-time environment, Journal of the ACM, 20 (1): 46–61, 1973.
Changelog for package rclc
6.0.0 (2023-06-15)
- Data structures interfaces for multi-threaded executor (#355)
- update ros-tooling versions (#361)
- updated actions/checkout version (#367)
3.0.9 (2023-03-22)
- Added build status of bloom-releases for Humble distribution (#291)
- [rolling] updated ros-tooling versions (#289)
- github action: updated os-version to ubuntu-22.04 (backport #295) (#296)
- Added documentation (#301)
- Drop build dependency on std_msgs (#314)
- Updated
and (#318) - Removed build status for Galactic in README (EOL November 2022) (#321)
- Update documentation about number_of_handles (#326)
- executor.h: Fix a few docs typos (#338)
3.0.8 (2022-04-14)
- Remove duplicate typedefs. (#249)
- Add rmw dependencies due to EventsExecutor PR in rcl (#255)
- Fix action client & server deallocation (#257)
- updated documentation: build status for Rolling (#266)
- Update action client goal callback signature (#282)
- Upgrade parameters (#274)
3.0.7 (2022-02-17)
- Fix enum naming for avoid collision (#242)
- Added dependency for package performance-test-fixture (#245)
3.0.6 (2022-01-25)
- executor ignore canceled timers (#220)
- uddated documentation README.md (#229)
- resolved error in unit test see issue #230 (#231)
- Add thread dependency to examples (Rolling) (#237) (resolves in this package only cpplint errors)
3.0.5 (2021-11-23)
- Fix data_available reset for timer (backport #215) (#217)
3.0.4 (2021-11-17)
- Ignoring unsuccessful SERVICE_TAKE (#175)
- Add rclc_parameter Quality Declaration (#144)
- use-ros2-testing (#185)
- Fix: printf in executor spin (#195)
- Fix init options handling (#202) (#205)
- Remove init options from support (#203)
- RCLC Actions Implementation (#170)
- Add rcl_action as build export dependency (#211)
3.0.3 (2021-07-28)
- Checking for valid ROS context in spin_some
- Refactoring executor (removing callback_type)
- Fixing codecov config
3.0.2 (2021-07-26)
- Updated codecov to ignore test folders
- Updated bloom release status table
3.0.1 (2021-07-17)
- Added rclc_parameter package
- Added quality of service entity creation API
- Added executor prepare API
- Added support for removing subscription from executor
- Added support for subscription with context
- Added quality declaration statement
- Updated compatability function for sleep
- Removed duplicate NOTICE files
2.0.0 (2021-04-23)
- Added codecov support
- New API of rcl_lifecycle in Rolling required major version bump
1.0.1 (2021-03-29)
- Windows port
- Compatibility sleep function (Windows, POSIX-OS)
- Fixed RCL lifecycle API change for Rolling
1.0.0 (2021-03-04)
- Service callbacks with context
- Fixed minor issues unit tests
- Upgraded setup_ros action (ci jobs)
- Removed Eloquent from ci jobs
0.1.7 (2021-01-20)
- Corrected corrupted changelog
0.1.6 (2021-01-20)
- Fixed issues due to Github Action timing delays on cloud build
- Fixed missing package dependency in Github Action for Eloquent
0.1.5 (2020-12-11)
- Added support for services,clients and guard_conditions to rclc executor
- Added table for bloom release status in README file
0.1.4 (2020-11-25)
- Fixed error in bloom release
0.1.3 (2020-11-23)
- Added rclc_lifecycle package
- Change maintainer information
- Minor fixes, updated unit tests
0.1.2 (2020-05-19)
- Fixed compiler errors for bloom release
0.1.1 (2020-05-14)
- Initial release
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rclc at Robotics Stack Exchange
|
|
rclc package from rclc reporclc rclc_examples rclc_lifecycle |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.1 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/rclc.git |
| VCS Type | git |
| VCS Version | dashing |
| Last Updated | 2021-07-20 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Jan Staschulat
- Pablo Garrido
Authors
- Jan Staschulat
- William Woodall
The rclc package
Table of Contents
RCLC-Executor * Requirement Analysis * Real-time embedded application use-case * Sense-plan-act pipeline in mobile robotics * Synchronization of multiple rates * High-priority processing path * Features * Sequential execution * Trigger condition * LET-Semantics * Executor API * Configuration * Running * Clean-Up * Examples RCLC-Executor * Example real-time embedded application use-case * Example sense-plan-act pipeline in mobile robotics * Example synchronization of multiple rates * Example high-priority processing path
Overview
The rclc-package is a ROS 2 package, which provides convenience functions to create ROS Client Library(RCL) data types and an RCLC-Executor in the C programming language. The convenience functions are a thin API layer on top of RCL-layer to create publishers, subscribers, timers and nodes with a one-liner like in rclcpp. The RCLC-Executor provides an API register subscriptions and timers as well as requesting data from DDS and executing the corresponding callbacks, like the rclcpp Executor for C++. As described in CB2019, it is difficult to reason about end-to-end latencies because of the complex semantics of the rclcpp Executor. Therefore, the RCLC Executor comes with a number of features, which provides mechanisms for deterministic and real-time execution.
The quality declaration is available in QUALITY_DECLARATION.md.
RCLC-Executor
Here we introduce the rclc Executor, which is a ROS 2 Executor implemented based on and for the rcl API, for applications written in the C language. Often embedded applications require real-time to guarantee end-to-end latencies and need deterministic runtime behavior to correctly replay test data. However, this is difficult with the default ROS 2 Executor because of its complex semantics, as discussed in the previous section.
First, we will analyse the requirements for such applications and, secondly, derive simple features for an Executor to enable deterministic and real-time behavior. Then we will present the API of the RCLC-Executor and provide example usages of the RCLC-Executor to address these requirements.
Requirement Analysis
First we discuss a use-case in the embedded domain, in which the time-triggered paradigm is often used to guarantee deterministic and real-time behavior. Then we analyse software design patterns in mobile robotics which enable deterministic behavior.
Real-time embedded application use-case
In embedded systems, real-time behavior is approached by using the time-triggered paradigm, which means that the processes are periodically activated. Processes can be assigned priorities to allow pre-emptions. Figure 1 shows an example, in which three processes with fixed periods are shown. The middle and lower process are preempted multiple times depicted with empty dashed boxes.
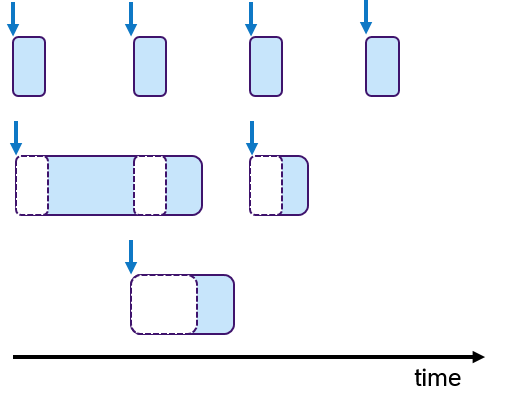
Figure 1: Fixed periodic preemptive scheduling
To each process one or multiple tasks can be assigned, as shown in Figure 2. These tasks are executed sequentially, which is often called cooperative scheduling.
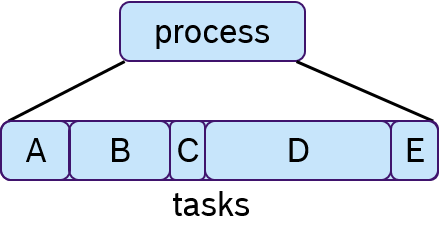
Figure 2: Processes with sequentially executed tasks.
While there are different ways to assign priorities to a given number of processes, the rate-monotonic scheduling assignment, in which processes with a shorter period have a higher priority, has been shown optimal if the processor utilization is less than 69% LL1973.
In the last decades many different scheduling approaches have been presented, however fixed-periodic preemptive scheduling is still widely used in embedded real-time systems KZH2015. This becomes also obvious, when looking at the features of current operating systems. Like Linux, real-time operating systems, such as NuttX, Zephyr, FreeRTOS, QNX etc., support fixed-periodic preemptive scheduling and the assignment of priorities, which makes the time-triggered paradigm the dominant design principle in this domain.
However, data consistency is often an issue when preemptive scheduling is used and if data is being shared across multiple processes via global variables. Due to scheduling effects and varying execution times of processes, writing and reading these variables could occur sometimes sooner or later. This results in an latency jitter of update times (the timepoint at which a variable change becomes visible to other processes). Race conditions can occur when multiple processes access a variable at the same time. To solve this problem, the concept of logical-execution time (LET) was introduced in HHK2001, in which communication of data occurs only at pre-defined periodic time instances: Reading data only at the beginning of the period and writing data only at the end of the period. The cost of an additional latency delay is traded for data consistency and reduced jitter. This concept has also recently been applied to automotive applications NSP2018.
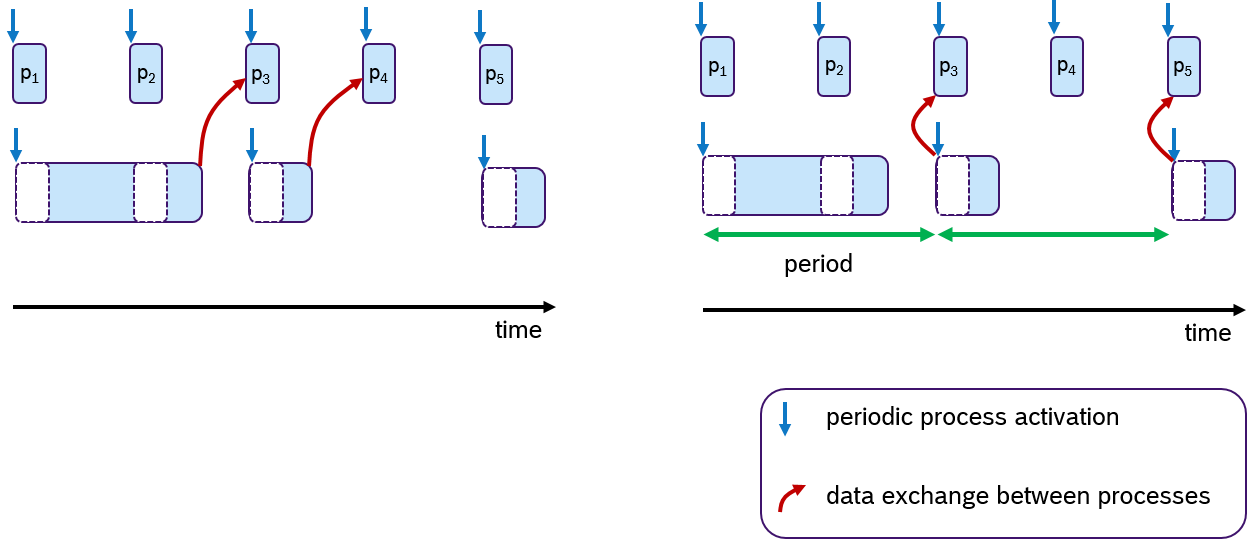
Figure 3: Data communication without and with Logical Execution Time paradigm.
An Example of the LET concept is shown in Figure 3. Assume that two processes are communicating data via one global variable. The timepoint when this data is written is at the end of the processing time. In the default case (left side), the process p3 and p4 receive the update. At the right side of the figure, the same scenario is shown with LET semantics. Here, the data is communicated only at period boundaries. In this case, the lower process communicates at the end of the period, so that always process p3 and p5 receive the new data.
The described embedded use case relies on the following concepts: - periodic execution of processes - assignment of fixed priorities to processes - preemptive scheduling of processes - co-operative scheduling of tasks within a process (sequential execution) - data synchronization with LET-semantics
While periodic activation is possible in ROS 2 by using timers, preemptive scheduling is supported by the operating system and assigning priorities on the granularity of threads/processes that correspond to the ROS nodes; it is not possible to sequentially execute callbacks, which have no data-dependency.
Furthermore data is read from the DDS queue just before the callback is executed and data is written sometime during the time the application is executed.
While the spin_period function of the rclcpp-Executor allows to check for data at a fixed period and executing those callbacks for which data is available, however, with this spin-function does not execute all callbacks irrespective wheter data is available or not.
So spin_period is not helpful to periodically execute a number of callbacks (aka tasks within a process).
So we need a mechanism that triggers the execution of multiple callbacks (aka tasks) based on a timer.
Data transmission is achieved via DDS which does not allow to implement a LET-semantics.
To summarize, we derive the following requirements:
Derived Requirements: - trigger the execution of multiple callbacks - sequential processing of callbacks - data synchronization with LET semantics
Sense-plan-act pipeline in mobile robotics
In the next sections we describe common software design patterns which are used in mobile robotics to achieve deterministic behavior. For each design pattern we describe the concept and the derived requirements for a deterministic Executor. Concept:
A common design paradigm in mobile robotics is a control loop, consisting of several phases: A sensing phase to aquire sensor data, a plan phase for localization and path planning and an actuation-phase to steer the mobile robot. Of course, more phases are possible, here these three phases shall serve as an example. Such a processing pipeline is shown in Figure 4.

Figure 4: Multiple sensors driving a Sense-Plan-Act pipeline.
Typically multiple sensors are used to perceive the environment. For example an IMU and a laser scanner. The quality of localization algorithms highly depend on how old such sensor data is when it is processed. Ideally the latest data of all sensors should be processed. One way to achieve this is to execute first all sensor drivers in the sense-phase and then process all algorithms in the plan-phase.
Currently, such a processing order cannot be defined with the default ROS 2 Executor. One could in principle design a data-driven pipeline, however if e.g. the Laser scan is needed by some other callback in the sense-phase as well as in the plan-phase, the processing order of these subscribers is arbitrary.
For this sense-plan-act pattern, we could define one executor for each phase. The plan-phase would be triggered only when all callbacks in the sense-phase have finished.
Derived Requirements: - triggered execution of callbacks
Synchronization of multiple rates
Concept:
Often multiple sensors are being used to sense the environment for mobile robotics. While an IMU sensor provides data samples at a very high rate (e.g. 500 Hz), laser scans are available at a much slower frequency (e.g. 10Hz) determined by the revolution time. Then the challenge is, how to deterministically fuse sensor data with different frequencies. This problem is depicted in Figure 5.
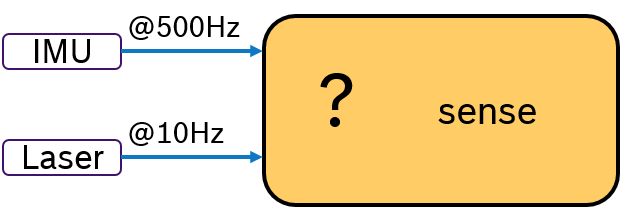
Figure 5: How to deterministically process multi-frequent sensor data.
Due to scheduling effects, the callback for evaluating the laser scan might be called just before or just after an IMU data is received. One way to tackle this is to write additional synchronization code inside the application. Obviously, this is a cumbersome and not-portable solution.
An Alternative would be to evaluate the IMU sample and the laser scan by synchronizing their frequency. For example by processing always 50 IMU samples with one laser scan. This approach is shown in Figure 6. A pre-processing callback aggregates the IMU samples and sends an aggregated message with 50 samples at 10Hz rate. Now both messages have the same frequency. With a trigger condition, which fires when both messages are available, the sensor fusion algorithm can expect always synchronized input data.
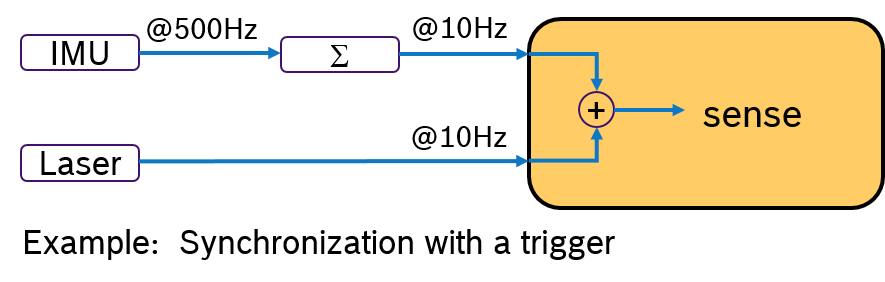
Figure 6: Synchronization of multiple input data with a trigger.
In ROS 2 this is currently not possible to be modeled because of the lack of a trigger concept in the ROS 2 Executor. Message filters could be used to synchronize input data based on the timestamp in the header, but this is only available in rclcpp (and not in rcl). Further more, it would be more efficient to have such a trigger concept directly in the Executor. <!-- TODO - Bilder erweitern mit drei boxen: request IMU, process laser, fusion dann wird klarer was mit den Daten wird - Aus dem Bild die Beschreibung löschen --> Another idea would be to actively request for IMU data only when a laser scan is received. This concept is shown in Figure 7. Upon arrival of a laser scan message, first, a message with aggregated IMU samples is requested. Then, the laser scan is processed and later the sensor fusion algorithm. An Executor, which would support sequential execution of callbacks, could realize this idea.
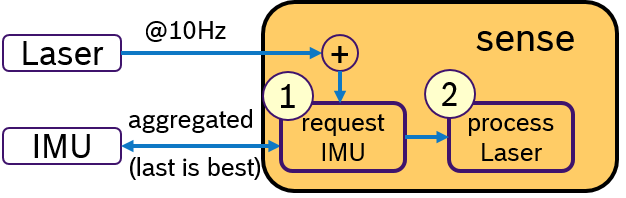
Figure 7: Synchronization with sequential processing.
Derived Requirements from both concepts: - triggered execution - sequential processing of callbacks
High-priority processing path
Motivation:
Often a robot has to fullfill several activities at the same time. For example following a path and avoiding obstacles. While path following is a permanent activity, obstacle avoidance is triggered by the environment and should be immediately reacted upon. Therefore one would like to specify priorities to activities. This is depicted in Figure 8:
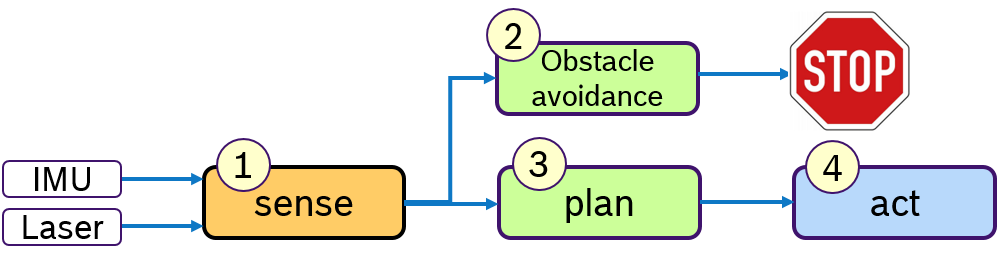
Figure 8: Managing high priority path with sequential order.
Assuming a simplified control loop with the activities sense-plan-act, the obstacle avoidance, which might temporarily stop the robot, should be processed before the planning phase. In this example we assume that these activities are processed in one thread.
Derived requirements: - sequential processing of callbacks
Features
Based on the real-time embedded use-case as well as the software architecture patterns in mobile robotics, we propose an Executor with the following main features: - user-defined sequential execution of callbacks - trigger condition to activate processing - data synchronization: LET-semantics or rclcpp Executor semantics
As stated before, this Executor is based on the RCL library and is written in C to natively support microcontroller applications written in C. These features are now described in more detail.
Sequential execution
- At configuration, the user defines the order of handles.
- At configuration, the user defines, whether the handle shall be called only when new data is available (ON_NEW_DATA) or whether the callback shall always be called (ALWAYS).
- At runtime, all handles are processed in the user-defined order:
- if the configuration of handle is ON_NEW_DATA, then the corresponding callback is only called if new data is available
- if the configuration of the handle is ALWAYS, then the corresponding callback is always executed. In case, no data is available from DDS, then the callback is called with no data (e.g. NULL pointer).
Trigger condition
Given a set of handles, a trigger condition based on the input data of these handles shall decide when the processing is started.
-
Available options:
- ALL operation: fires when input data is available for all handles
- ANY operation: fires when input data is available for at least one handle
- ONE: fires when input data for a user-specified handle is available
- User-defined function: user can implement more sophisticated logic
LET-Semantics
- Assumption: time-triggered system, the executor is activated periodically
- When the trigger fires, reads all input data and makes a local copy
- Processes all callbacks in sequential order
- Write output data at the end of the executor's period (Note: this is not implemented yet)
Additionally we have implemented the current rclcpp Executor semantics RCLCPP: - waiting for new data for all handles (rcl_wait) - using trigger condition ANY - if trigger fires, start processing handles in pre-defined sequential order - request from DDS-queue the new data just before the handle is executed (rcl_take)
The selection of the LET semantics is optional. The default semantics is RCLCPP.
Executor API
The API of the RCLC-Executor can be divided in several phases: Configuration, Running and Clean-Up.
Configuration phase
During the configuration phase, the user shall define: - the total number of callbacks - trigger condition (optional, default: ANY) - data communcation semantics (optional, default RCLCPP) - the processing sequence of the callbacks
The following functions are supported for this configuration:
rclc_executor_t * rclc_get_zero_initialized_executor()
Returns a zero initialized executor object.
rclc_executor_init(rclc_executor_t * executor, rcl_context_t * context, const size_t number_of_handles, const rcl_allocator_t * allocator)
As the Executor is intended for embedded controllers, dynamic memory management is crucial.
Therefore at initialization of the RCLC-Executor, the user defines the total number of handles number_of_handles.
The necessary dynamic memory will be allocated only in this phase and no more memory in the running phase.
This makes this Executor static in the sense, that during runtime no additional callbacks can be added.
The context is the RCL context, and allocator points to a memory allocator.
rclc_executor_set_timeout(rclc_executor_t * executor, const uint64_t timeout_ns)
The timeout in nano-seconds timeout_nsfor waiting for new data from the DDS-queue is specified in rclc_executor_set_timeout() (this is the timeout parameter for rcl_wait()).
rclc_executor_set_semantics(rclc_executor_t * executor, rclc_executor_semantics_t semantics)
The data communication semantics can either be RCLCPP(default) or LET.
To be compatible with ROS 2 rclcpp Executor, the existing rclcpp semantics is implemented with the option RCLCPP.
That is, with the spin-function the DDS-queue is constantly monitored for new data (rcl_wait).
If new data becomes available, then it is fetched from DDS (rcl_take) immediately before the callback is executed.
All callbacks are processed in the user-defined order, this is the only difference to the rclcpp Executor, in which the order can not be defined by the user.
The LET semantics is implemented such that at the beginning of processing all available data is fetched (rcl_take) and buffered and then the callbacks are processed in the pre-defined operating on the buffered copy.
rclc_executor_set_trigger(rclc_executor_t * executor, rclc_executor_trigger_t trigger_function, void * trigger_object)
The trigger condition rclc_executor_set_trigger defines when the processing of the callbacks shall start.
For convenience some trigger conditions have been defined:
- rclc_executor_trigger_any(default) : start executing if any callback has new data
- rclc_executor_trigger_all : start executing if all callbacks have new data
- rclc_executor_trigger_one(&data) : start executing if data has been received
- rclc_executor_trigger_always: returns always true, that is every time the Executor spins, the processing of the callbacks is invocated.
For example with spin_period and this trigger condition as well as specifying all callbacks of subscriptions being called as ALWAYS, a fixed period execution of all callbacks can be implemented, irrespective whether new data is available or not.
- user_defined_function: the user can also define its own function with more complex logic
With rclc_executor_trigger_any being the default trigger condition, the current semantics of the rclcpp Executor is selected.
With the rclc_executor_trigger_one trigger, the handle to trigger is specified with trigger_object.
In the other cases of the trigger conditions this parameter shall be NULL.
rclc_executor_add_subscription(rclc_executor_t * executor, rcl_subscription_t * subscription, void * msg, rclc_callback_t callback, rclc_executor_handle_invocation_t invocation)
rclc_executor_add_timer( rclc_executor_t * executor, rcl_timer_t * timer)
The user adds handles to the Executor the functions rclc_executor_add_subscription() for subscriptions and rclc_executor_add_timer() for timers.
The order in which these functions are called, defines later the sequential processing order during runtime.
For adding a subscription, the rcl subscription handle subscription, a pointer an allocated message msg, the message callback callback and an invocation option invocation need to be specified.
The invocation option specifies, whether the callback shall be executed only if new data is available (ON_NEW_DATA) or if the callback shall always be executed (ALWAYS).
The second option is useful for example when the callback is expected to be called at a fixed rate.
For a timer, only the rcl timer object timer is needed.
Running phase
rclc_executor_spin_some(rclc_executor_t * executor, const uint64_t timeout_ns)
The function rclc_executor_spin_some checks for new data from the DDS queue once.
It first copies all data into local data structures and then executes all handles according the specified order.
This implements the LET semantics.
rclc_executor_spin(rclc_executor_t * executor)
The function rclc_executor_spin calls rclc_executor_spin_some indefinitely as long
as the ROS system is alive.
This might create a high performance load on your processor.
rclc_executor_spin_period(rclc_executor_t * executor, const uint64_t period)
The function rclc_executor_spin_period calls rclc_executor_spin_some periodically
(as defined with the argument period) as long as the ROS system is alive.
rclc_executor_spin_one_period(rclc_executor_t * executor, const uint64_t period)
This is a function used by rclc_executor_spin_period to spin one time.
The purpose is to test the accurary of the spin_period function in the unit tests.
Clean-Up
rclc_executor_fini()
The function rlce_executor_fini frees the dynamically allocated memory of the executor.
Examples RCLC Executor
We provide the relevant code snippets how to setup the RCLC-Executor for the embedded use case and for the software design patterns in mobile robotics applications as described above.
Example real-time embedded application use-case
With sequential execution the co-operative scheduling of tasks within a process can be modeled. The trigger condition is used to periodically activate the process which will then execute all callbacks in a pre-defined order. Data will be communicated using the LET-semantics. Every Executor is executed in its own tread, to which an appropriate priority can be assigned.
In the following example, the Executor is setup with 4 handles.
We assume a process has three subscriptions sub1, sub2, sub3.
The sequential processing order is given by the order as they are added to the Executor.
A timer timer defines the period.
The trigger_one with the parameter timer is used, so that whenever the timer is ready, all callbacks are processed. Finally the data communication semantics LET is defined.
#include "rcl_executor/let_executor.h"
// define subscription callback
void my_sub_cb1(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb2(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb3(const void * msgin)
{
// ...
}
// define timer callback
void my_timer_cb(rcl_timer_t * timer, int64_t last_call_time)
{
// ...
}
// necessary ROS 2 objects
rcl_context_t context;
rcl_node_t node;
rcl_subscription_t sub1, sub2, sub3;
rcl_timer_t timer;
rcle_let_executor_t exe;
// define ROS context
context = rcl_get_zero_initialized_context();
// initialize ROS node
rcl_node_init(&node, &context,...);
// create subscriptions
rcl_subscription_init(&sub1, &node, ...);
rcl_subscription_init(&sub2, &node, ...);
rcl_subscription_init(&sub3, &node, ...);
// create a timer
rcl_timer_init(&timer, &my_timer_cb, ... );
// initialize executor with four handles
rclc_executor_init(&exe, &context, 4, ...);
// define static execution order of handles
rclc_executor_add_subscription(&exe, &sub1, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sub2, &my_sub_cb2, ALWAYS);
rclc_executor_add_subscription(&exe, &sub3, &my_sub_cb3, ALWAYS);
rclc_executor_add_timer(&exe, &timer);
// trigger when handle 'timer' is ready
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &timer);
// select LET-semantics
rclc_executor_data_comm_semantics(&exe, LET);
// spin forever
rclc_executor_spin(&exe);
Example sense-plan-act pipeline in mobile robotics
In this example we want to realise a sense-plan-act pipeline in a single thread. The trigger condition is demonstrated by activating the sense-phase when both data for the Laser and IMU are available.
Three executors are necessary exe_sense, exe_plan and exe_act. The two sensor acquisition callbacks sense_Laser and sense_IMU are registered in the Executor exe_sense.
The trigger condition ALL is responsible to activate the sense-phase only when all data for these two callbacks are available.
Finally all three Executors are spinning using a while-loop and the spin_some function.
The definitions of callbacks are omitted.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act;
rcle_let_executor_t exe_sense, exe_plan, exe_act;
// initialize executors
rclc_executor_init(&exe_sense, &context, 2, ...);
rclc_executor_init(&exe_plan, &context, 1, ...);
rclc_executor_init(&exe_act, &context, 1, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb1, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb2, ON_NEW_DATA);
rclc_let_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// executor for plan-phase
rclc_executor_add_subscription(&exe_plan, &plan, &my_sub_cb3, ON_NEW_DATA);
// executor for act-phase
rclc_executor_add_subscription(&exe_act, &act, &my_sub_cb4, ON_NEW_DATA);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_sense);
rclc_executor_spin_some(&exe_plan);
rclc_executor_spin_some(&exe_act);
}
Example synchronization of multiple rates
The sensor fusion synchronizing the multiple rates with a trigger is shown below.
...
rcl_subscription_t aggr_IMU, sense_Laser, sense_IMU;
rcle_let_executor_t exe_aggr, exe_sense;
// initialize executors
rclc_executor_init(&exe_aggr, &context, 1, ...);
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for aggregate IMU data
rclc_executor_add_subscription(&exe_aggr, &aggr_IMU, &my_sub_cb1, ON_NEW_DATA);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb3, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_aggr);
rclc_executor_spin_some(&exe_sense);
}
The setup for the sensor fusion using sequential execution is shown below.
Note, that the sequential order is sense_IMU, which will request the aggregated IMU message, and then sense_Laser while the trigger will fire, when a laser message is received.
...
rcl_subscription_t sense_Laser, sense_IMU;
rcle_let_executor_t exe_sense;
// initialize executor
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe_sense);
Example high-priority processing path
This example shows the sequential processing order to execute the obstacle avoidance obst_avoid
after the callbacks of the sense-phase and before the callback of the planning phase plan.
The control loop is started when a laser message is received.
Then an aggregated IMU message is requested, like in the example above.
Then all the other callbacks are always executed. This assumes that these callbacks communicate via a global data structure.
Race conditions cannot occur, because the callbacks run all in one thread.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act, obst_avoid;
rcle_let_executor_t exe;
// initialize executors
rclc_executor_init(&exe, &context, 5, ...);
// define processing order
rclc_executor_add_subscription(&exe, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe, &obst_avoid, &my_sub_cb3, ALWAYS);
rclc_executor_add_subscription(&exe, &plan, &my_sub_cb4, ALWAYS);
rclc_executor_add_subscription(&exe, &act, &my_sub_cb5, ALWAYS);
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe);
RCL convenience functions
The rclc package also provides a number of convenience functions, which make it easier to
create the RCL-objects rcl_node_t, rcl_subscription_t, rcl_timer_t and rcl_publisher_t.
Convenience functions: - rclc_support_init() - rclc_support_init_with_options() - rclc_support_fini() - rclc_node_init_default() - rclc_publisher_init_default() - rclc_subscription_init_default() - rclc_timer_init_default()
The setup of RCL objects is simplified, by defining a new type rclc_support_t, which contains
the parameters used in multiple RCL initialization functions:
typedef struct
{
rcl_init_options_t init_options;
rcl_context_t context;
rcl_allocator_t * allocator;
rcl_clock_t clock;
} rclc_support_t;
In the example provided in rclc_examples, one node with one publisher, one timer and one subscription is implemented with and without the convenience functions. The number of code lines of the example to setup the rcl objects with the convenience functions is reduced by 24% compared to the initialization using the rcl API.
RCLC-Example Package
An example, how to use the RCLC-Executor with RCL objects is given in the file example_executor.c in the package: rclc_examples.
An example, how to use the RCLC-Executor with the rclc convenience functions is given in the file
example_executor_convenience.c the package: rclc_examples.
Limitations:
- support for subscriptions and timers (services, clients, guard conditions are not supported yet)
- LET semantics: writing at the end of period not implemented
References
[CB2019] D. Casini, T. Blaß, I. Lütkebohle, B. Brandenburg: Response-Time Analysis of ROS 2 Processing Chains under Reservation-Based Scheduling, in Euromicro-Conference on Real-Time Systems 2019. [Paper].[slides]
[EK2018] R. Ernst, S. Kuntz, S. Quinton, M. Simons: The Logical Execution Time Paradigm: New Perspectives for Multicore Systems, February 25-28 2018 (Dagstuhl Seminar 18092). [Paper]
[BP2017] A. Biondi, P. Pazzaglia, A. Balsini, M. D. Natale: Logical Execution Time Implementation and Memory Optimization Issues in AUTOSAR Applications for Multicores, International Worshop on Analysis Tools and Methodologies for Embedded and Real-Time Systems (WATERS2017), Dubrovnik, Croatia.[Paper]
[LL1973] Liu, C. L.; Layland, J.:Scheduling algorithms for multiprogramming in a hard real-time environment, Journal of the ACM, 20 (1): 46–61, 1973.
[HHK2001] Henzinger T.A., Horowitz B., Kirsch C.M. (2001) Giotto: A Time-Triggered Language for Embedded Programming. In: Henzinger T.A., Kirsch C.M. (eds) Embedded Software. EMSOFT 2001. Lecture Notes in Computer Science, vol 2211. Springer, Berlin, Heidelberg
[NSP2018] A. Naderlinger, S. Resmerita, and W. Pree: LET for Legacy and Model-based Applications, Proceedings of The Logical Execution Time Paradigm: New Perspectives for Multicore Systems (Dagstuhl Seminar 18092), Wadern, Germany, February 2018.
[KZH2015] S. Kramer, D. Ziegenbein, and A. Hamann: Real World Automotive Benchmarks For Free, International Workshop on Analysis Tools and Methodologies for Embedded adn Real-Time Sysems (WATERS), 2015.[Paper]
[micro-ROS] micro-ROS project
Changelog for package rclc
1.0.1 (2021-07-17)
- Updated ci workflow
- Added quality declaration statement
- Updated compatability function for sleep
- Added windows support
- Added codecov support
1.0.0 (2021-03-04)
- Service callbacks with context
- Fixed minor issues unit tests
- Upgraded setup_ros action (ci jobs)
- Removed Eloquent from ci jobs
0.1.7 (2021-01-20)
- Corrected corrupted changelog
0.1.6 (2021-01-20)
- Fixed issues due to Github Action timing delays on cloud build
- Fixed missing package dependency in Github Action for Eloquent
0.1.5 (2020-12-11)
- Added support for services,clients and guard_conditions to rclc executor
- Added table for bloom release status in README file
0.1.4 (2020-11-25)
- Fixed error in bloom release
0.1.3 (2020-11-23)
- Added rclc_lifecycle package
- Change maintainer information
- Minor fixes, updated unit tests
0.1.2 (2020-05-19)
- Fixed compiler errors for bloom release
0.1.1 (2020-05-14)
- Initial release
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Repo | Deps |
|---|---|---|
| rclc_examples | github-ros2-rclc | |
| rclc_lifecycle | github-ros2-rclc |
Launch files
Messages
Services
Plugins
Recent questions tagged rclc at Robotics Stack Exchange
|
|
rclc package from rclc reporclc rclc_examples rclc_lifecycle rclc_parameter |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.0.6 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/rclc.git |
| VCS Type | git |
| VCS Version | galactic |
| Last Updated | 2023-01-25 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Jan Staschulat
- Pablo Garrido
Authors
- Jan Staschulat
- William Woodall
The rclc package
Table of contents
Introduction
Predictable execution under given real-time constraints is a crucial requirement for many robotic applications. While the service-based paradigm of ROS allows a fast integration of many different functionalities, it does not provide sufficient control over the execution management. For example, there are no mechanisms to enforce a certain execution order of callbacks within a node. Also the execution order of multiple nodes is essential for control applications in mobile robotics. Cause-effect-chains comprising of sensor acquisition, evaluation of data and actuation control should be mapped to ROS nodes executed in this order, however there are no explicit mechanisms to enforce it. Furthermore, when data recordings collected in field tests as ROS-bags are re-played, then the results are often surprisingly different due to non-determinism of process scheduling.
Manually setting up a particular execution order of subscriptions and publishing topics as well as defining use-case specific priorities of the corresponding Linux processes is always possible. However, this approach is error-prone, difficult to extend and requires an in-depth knowledge of the deployed ROS 2 packages in the system.
Therefore the goal of the Executor in micro-ROS is to support roboticists with practical and easy-to-use real-time mechanisms which provide solutions for: - Deterministic execution - Real-time guarantees - Integration of real-time and non real-time functionalities on one platform - Specific support for RTOS and microcontrollers
In ROS 1 a network thread is responsible for receiving all messages and putting them into a FIFO queue (in roscpp). That is, all callbacks were called in a FIFO manner, without any execution management. With the introduction of DDS (data distribution service) in ROS 2, the messages are buffered in DDS. In ROS 2, an Executor concept was introduced to support execution management. At the rcl-layer, a wait-set is configured with handles to be received and in a second step, the handles are taken from the DDS-queue. A handle is a generic term defined in rcl-layer for timers, subscriptions, services, clients and guard conditions.
The standard implementation of the ROS 2 Executor for the C++ API (rclcpp) has, however, certain unusual features, like precedence of timers over all other DDS handles, non-preemptive round-robin scheduling for non-timer handles and considering only one input data for each handle (even if multiple could be available). These features have the consequence, that in certain situations the standard rclcpp Executor is not deterministic and it makes guaranteeing real-time requirements very hard [CB2019]. We have not looked at the ROS 2 Executor implementation for Python Frontend (rclpy) because we consider a micro-controllers platform, on which typically C or C++ appliations will run.
Given the goals for a Real-Time Executor and the limitations of the ROS 2 standard rclcpp Executor, the challenges are: - to develop an adequate and well-defined scheduling mechanisms for the ROS 2 framework and the real-time operating system (RTOS) - to define an easy-to-use interface for ROS developers - to model requirements (like latencies, determinism in subsystems) - mapping of ROS 2 framework and operating system schedulers (semi-automated and optimized mapping is desired as well as generic, well-understood framework mechanisms)
Our approach is to provide a real-time-capable Executor for the rcl+rclc layer (as described in section Introduction to Client Library.) in the C programming language .
As the first step, we propose the rclc Executor for the rcl-layer in C programming language with several new features to support real-time and deterministic execution: It supports 1.) user-defined static sequential execution, 2) conditional execution semantics, 3) multi-threaded execution with scheduling configuration, and 4) logical execution semantics (LET). Sequential execution refers to the runtime behavior, that all callbacks are executed in a pre-defined order independent of the arrival time of messages. Conditional execution is available with a trigger condition which enables typical processing patterns in robotics (which are analyzed in detail in section Analysis of processing patterns. Configuration of scheduling parameters for multi-threaded application accomplishes prioritized execution. The logical execution time concept (LET) provides data synchronization for fixed periodic task scheduling of embedded applications.
Beyond the advanced execution management mechanisms for micro-ROS, we also contributed to improving and extending the Executor concept in rclcpp for standard ROS 2: the callback group-level Executor. It is not a new Executor but rather a refinement of the ROS 2 Executor API allowing to prioritize a group of callbacks which is not possible with the ROS 2 default Executor in its current Galactic release.
Analysis of rclcpp standard Executor
ROS 2 allows to bundle multiple nodes in one operating system process. To coordinate the execution of the callbacks of the nodes of a process, the Executor concept was introduced in rclcpp (and also in rclpy).
The ROS 2 design defines one Executor (instance of rclcpp::executor::Executor) per process, which is typically created either in a custom main function or by the launch system. The Executor coordinates the execution of all callbacks issued by these nodes by checking for available work (timers, services, messages, subscriptions, etc.) from the DDS queue and dispatching it to one or more threads, implemented in SingleThreadedExecutor and MultiThreadedExecutor, respectively.
The dispatching mechanism resembles the ROS 1 spin thread behavior: the Executor looks up the wait sets, which notifies it of any pending callback in the DDS queue. If there are multiple pending callbacks, the ROS 2 Executor executes them in an in the order as they were registered at the Executor.
Architecture
The following diagram depicts the relevant classes of the standard ROS 2 Executor implementation:
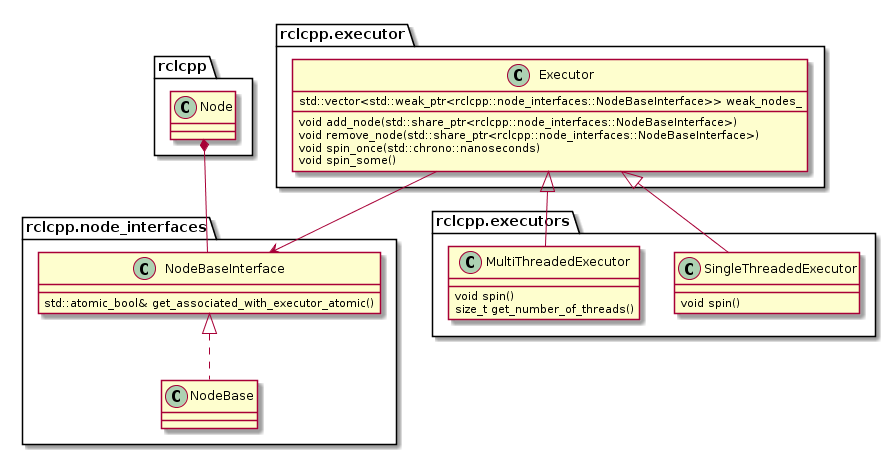
Note that an Executor instance maintains weak pointers to the NodeBaseInterfaces of the nodes only. Therefore, nodes can be destroyed safely, without notifying the Executor.
Also, the Executor does not maintain an explicit callback queue, but relies on the queue mechanism of the underlying DDS implementation as illustrated in the following sequence diagram:
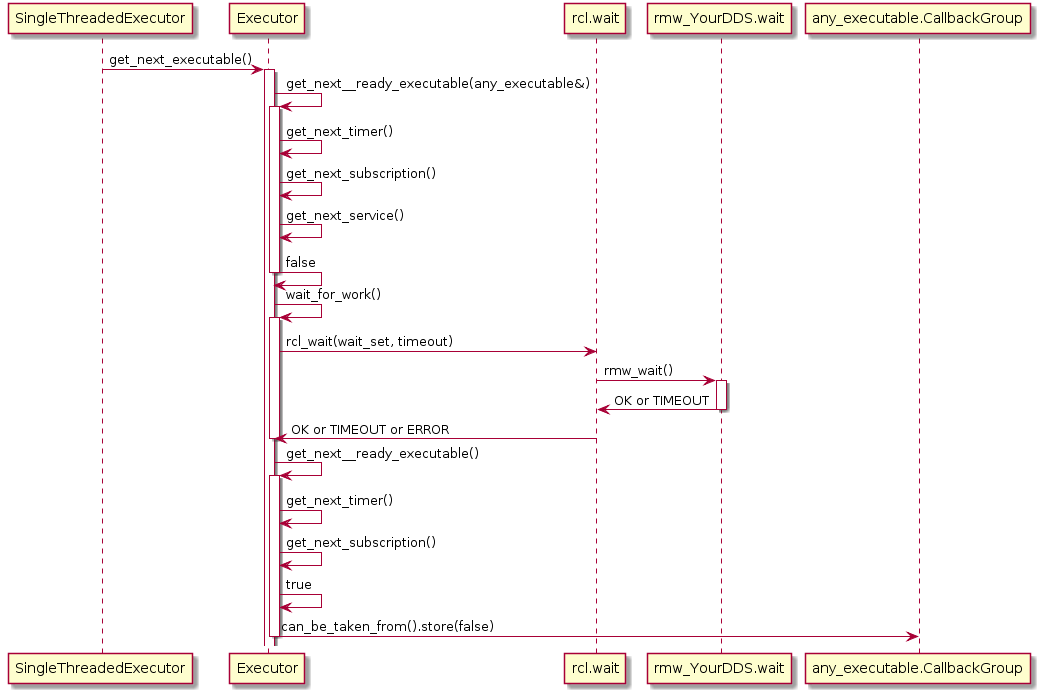
The Executor concept, however, does not provide means for prioritization or categorization of the incoming callback calls. Moreover, it does not leverage the real-time characteristics of the underlying operating-system scheduler to have finer control on the order of executions. The overall implication of this behavior is that time-critical callbacks could suffer possible deadline misses and a degraded performance since they are serviced later than non-critical callbacks. Additionally, due to the FIFO mechanism, it is difficult to determine usable bounds on the worst-case latency that each callback execution may incur.
Scheduling Semantics
In a recent paper [CB2019], the rclcpp Executor has been analyzed in detail and a response time analysis of cause-effect chains has been proposed under reservation-based scheduling. The Executor distinguishes four categories of callbacks: timers, which are triggered by system-level timers, subscribers, which are triggered by new messages on a subscribed topic, services, which are triggered by service requests, and clients, which are triggered by responses to service requests. The Executor is responsible for taking messages from the input queues of the DDS layer and executing the corresponding callback. Since it executes callbacks to completion, it is a non-preemptive scheduler, However it does not consider all ready tasks for execution, but only a snapshot, called readySet. This readySet is updated when the Executor is idle and in this step it interacts with the DDS layer updating the set of ready tasks. Then for every type of task, there are dedicated queues (timers, subscriptions, services, clients) which are processed sequentially. The following undesired properties were pointed out:
- Timers have the highest priority. The Executor processes timers always first. This can lead to the intrinsic effect, that in overload situations messages from the DDS queue are not processed.
- Non-preemptive round-robin scheduling of non-timer handles. Messages arriving during the processing of the readySet are not considered until the next update, which depends on the execution time of all remaining callbacks. This leads to priority inversion, as lower-priority callbacks may implicitly block higher-priority callbacks by prolonging the current processing of the readySet.
- Only one message per handle is considered. The readySet contains only one task instance, For example, even if multiple messages of the same topic are available, only one instance is processed until the Executor is idle again and the readySet is updated from the DDS layer. This aggravates priority inversion, as a backlogged callback might have to wait for multiple processing of readySets until it is considered for scheduling. This means that non-timer callback instances might be blocked by multiple instances of the same lower-priority callback.
Due to these findings, the authors present an alternative approach to provide determinism and to apply well-known schedulability analyses to a ROS 2 systems. A response time analysis is described under reservation-based scheduling.
Analysis of processing patterns
The development of an execution management mechanism for micro-ROS is based on an analysis of processing patterns commonly used in robotics and embedded systems. First, typical processing patterns in mobile robotics are presented which are used to implement deterministic behavior. Then, the processing patterns in the real-time embedded systems are analyzed, in which, as a main difference, the time-triggered paradigm is applied to accomplish real-time behavior.
Sense-plan-act pipeline in robotics
Now we describe common software design patterns which are used in mobile robotics to achieve deterministic behavior. For each design pattern we describe the concept and the derived requirements for a deterministic Executor.
Concept:
A common design paradigm in mobile robotics is a control loop, consisting of several phases: A sensing phase to aquire sensor data, a plan phase for localization and path planning and an actuation-phase to steer the mobile robot. Of course, more phases are possible, here these three phases shall serve as an example. Such a processing pipeline is shown in Figure 1.

Typically multiple sensors are used to perceive the environment. For example an IMU and a laser scanner. The quality of localization algorithms highly depend on how old such sensor data is when it is processed. Ideally the latest data of all sensors should be processed. One way to achive this is to execute first all sensor drivers in the sense-phase and then process all algorithms in the plan-phase.
Currently, such a processing order cannot be defined with the default Executor of rclcpp. One could in principle design a data-driven pipeline, however if e.g. the Laser scan is needed by some other callback in the sense-phase as well as in the plan-phase, the processing order of these subscribers is arbitrary.
For this sense-plan-act pattern, we could define one executor for each phase. The plan-phase would be triggered only when all callbacks in the sense-phase have finished.
Derived requirements: - triggered execution
Synchronization of multiple rates
Concept:
Often multiple sensors are being used to sense the environment for mobile robotics. While an IMU sensor provides data samples at a very high rate (e.g., 500 Hz), laser scans are availabe at a much slower frequency (e.g. 10Hz) determined by the revolution time. Then the challenge is, how to deterministically fuse sensor data with different frequencies. This problem is depicted in Figure 2.
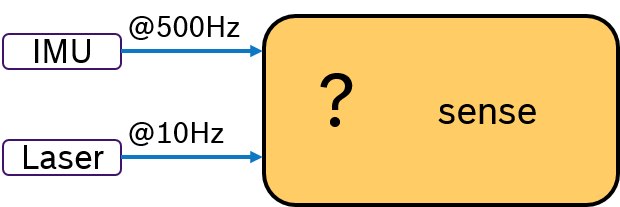
Due to scheduling effects, the callback for evaluating the laser scan might be called just before or just after an IMU data is received. One way to tackle this is to write additional synchronization code inside the application. Obviously, this is a cumbersome and not-portable solution.
An Alternative would be to evalute the IMU sample and the laser scan by synchronizing their frequency. For example by processing always 50 IMU samples with one laser scan. This approach is shown in Figure 3. A pre-processing callback aggregates the IMU samples and sends an aggregated message with 50 samples at 10Hz rate. Now both messages have the same frequency. With a trigger condition, which fires when both messages are available, the sensor fusion algorithm can expect always synchronized input data.
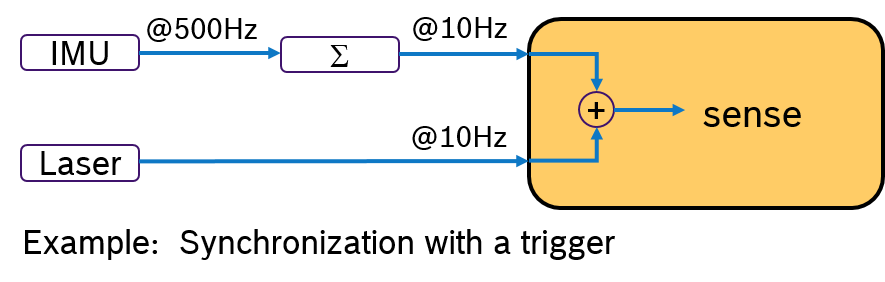
In ROS 2, this is currently not possible to be modeled because of the lack of a trigger concept in the Executors of rclcpp and rclpy. Message filters could be used to synchronize input data based on the timestamp in the header, but this is only available in rclcpp (and not in rcl). Further more, it would be more efficient to have such a trigger concept directly in the Executor.
Another idea would be to activly request for IMU data only when a laser scan is received. This concept is shown in Figure 4. Upon arrival of a laser scan mesage, first, a message with aggregated IMU samples is requested. Then, the laser scan is processed and later the sensor fusion algorithm. An Executor, which would support sequential execution of callbacks, could realize this idea.
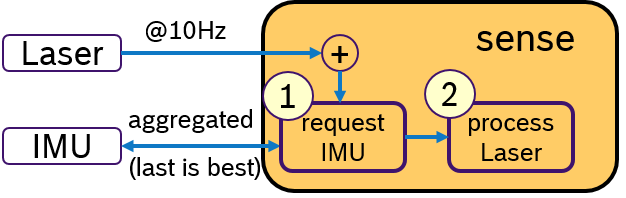
Derived requirements: - triggered execution - sequential procesing of callbacks
High-priority processing path
Concept Often a robot has to fullfill several activities at the same time. For example following a path and avoiding obstacles. While path following is a permanent activity, obstacle avoidance is trigged by the environment and should be immediately reacted upon. Therefore one would like to specify priorities to activities. This is depicted in Figure 5:
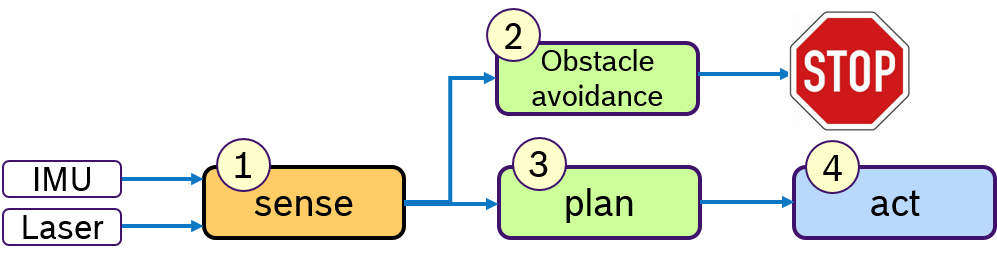
Assuming a simplified control loop with the activities sense-plan-act, the obstacle avoidance, which might temporarily stop the robot, should be processed before the planning phase. In this example we assume that these activites are processed in one thread.
Derived requirements: - sequential processing of callbacks
Real-time embedded applications
In embedded systems, real-time behavior is approached by using the time-triggered paradigm, which means that the processes are periodically activated. Processes can be assigned priorities to allow pre-emptions. Figure 6 shows an example, in which three processes with fixed periods are shown. The middle and lower process are preempted multiple times depicted with empty dashed boxes.
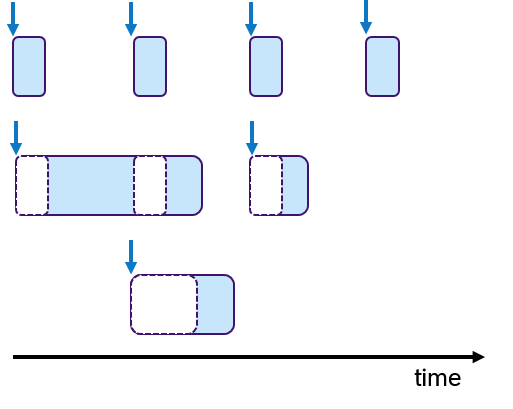
To each process one or multiple tasks can be assigned, as shown in Figure 7. These tasks are executed sequentially, which is often called cooperative scheduling.
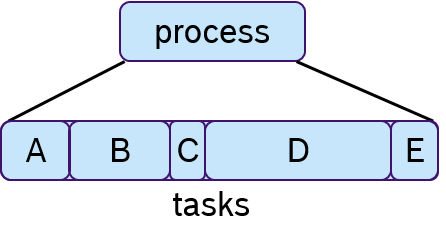
While there are different ways to assign priorities to a given number of processes, the rate-monotonic scheduling assignment, in which processes with a shorter period have a higher priority, has been shown optimal if the processor utilization is less than 69% [LL1973].
In the last decades many different scheduling approaches have been presented, however fixed-periodic preemptive scheduling is still widely used in embedded real-time systems [KZH2015]. This becomes also obvious, when looking at the features of current operating systems. Like Linux, real-time operating systems, such as NuttX, Zephyr, FreeRTOS, QNX etc., support fixed-periodic preemptive scheduling and the assignment of priorities, which makes the time-triggered paradigm the dominant design principle in this domain.
However, data consistency is often an issue when preemptive scheduling is used and if data is being shared across multiple processes via global variables. Due to scheduling effects and varying execution times of processes, writing and reading these variables could occur sometimes sooner or later. This results in an latency jitter of update times (the timepoint at which a variable change becomes visible to other processes). Race conditions can occur when multiple processes access a variable at the same time. So solve this problem, the concept of logical-execution time (LET) was introduced in [HHK2001], in which communication of data occurs only at pre-defined periodic time instances: Reading data only at the beginning of the period and writing data only at the end of the period. The cost of an additional latency delay is traded for data consistency and reduced jitter. This concept has also recently been applied to automotive applications[NSP2018].
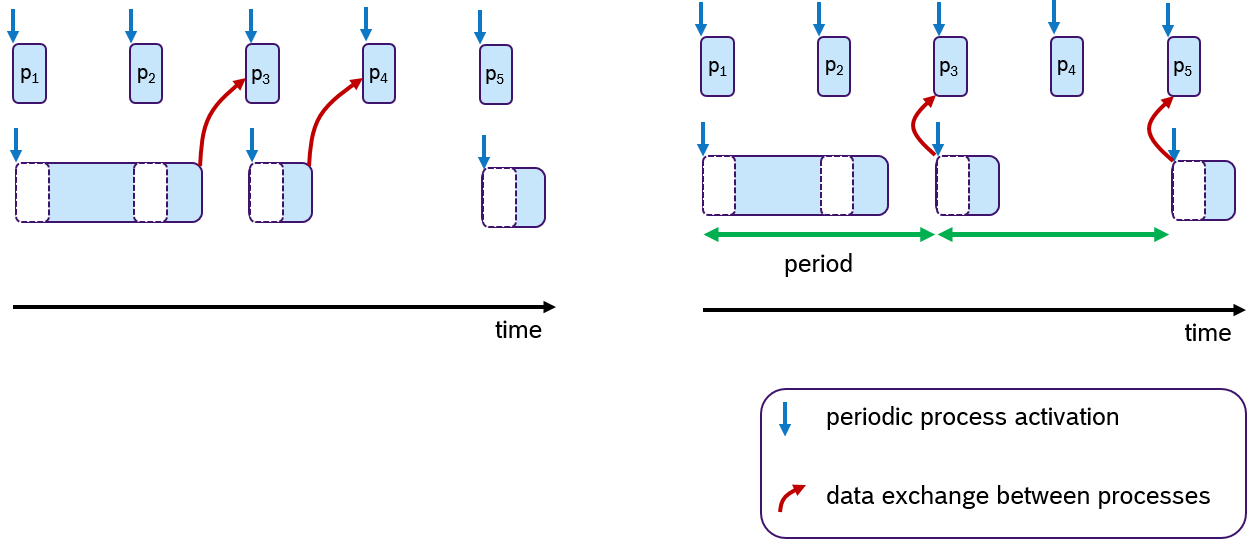
An Example of the LET concept is shown in Figure 8. Assume that two processes are communicating data via one global variable. The timepoint when this data is written is at the end of the processing time. In the default case (left side), the process p3 and p4 receive the update. At the right side of Figure 8, the same scenario is shown with LET semantics. Here, the data is communicated only at period boundaries. In this case, the lower process communicates at the end of the period, so that always process p3 and p5 receive the new data.
Concept: - periodic execution of processes - assignment of fixed priorities to processes - preemptive scheduling of processes - co-operative scheduling of tasks within a process (sequential execution) - data synchronization with LET-semantics
While periodic activation is possible in ROS 2 by using timers, preemptive scheduling is supported by the operating system and assigning priorities on the granularity of threads/processes that correspond to the ROS nodes; it is not possible to sequentially execute callbacks, which have no data-dependency. Furthermore data is read from the DDS queue just before the callback is executed and data is written sometime during the time the application is executed. While the spin_period function of the rclcpp Executor allows to check for data at a fixed period and executing those callbacks for which data is available, however, with this spin-function does not execute all callbacks irrespective wheter data is available or not. So spin_period is not helpful to periodically execute a number of callbacks (aka tasks within a process). So we need a mechanism that triggers the execution of multiple callbacks (aka tasks) based on a timer. Data transmission is achieved via DDS which does not allow to implement a LET-semantics. To summarize, we derive the following requirements.
Derived requirements: - trigger the execution - sequential processing of callbacks - data synchronization with LET semantics
rclc Executor
The rclc Executor is a ROS 2 Executor based on the rcl-layer in C programming language. As discussed above, the default rclcpp Executor is not suitable to implement real-time applications because of three main reasons: timers are preferred over all other handles, no priorization of callback execution and the round-robin to completion execution of callbacks. On the other hand, several processing patterns have been developed as best practices to achieve non-functional requirements, such as bounded end-to-end latencies, low jitter of response times of cause-effect chains, deterministic processing and short response times even in overload situations. These processing patterns are difficult to implement with the concepts availabe in the default ROS 2 Executor, therefore we have developed a flexible Executor: the rclc Executor.
Features
The rclc Executor is feature-complete, i.e. it supports all event types as the default ROS 2 Executor, which are: - subscriptions - timers - services - clients - guard conditions - actions - lifecycle
The flexible rclc Executor provides on top the following new features: - triggered execution - user-defined sequential execution - multi-threading and scheduling configuration (WIP) - LET-semantics for data synchronization of periodic process scheduling
First, a trigger condition allows to define when the processing of a callback shall start. This is useful to implement sense-plan-act control loops or more complex processing structures with directed acyclic graphs. Second, a user can specify the processing order in which these callbacks will be executed. With this feature, the pattern of sensor fusion with multiple rates, in which data is requested from a sensor based on the arrival of some other sensor, can be easily implemented. Third, the assignment of scheduling parameters (e.g., priorities) of the underlying operating system. With this feature, prioritized processing can be implemented. Finally, for periodic applications, the LET Semantics has been implemented to support data consistency for periodic process scheduling. These features are now described in more detail.
Sequential execution
- At configuration, the user defines the order of handles.
- At configuration, the user defines whether the handle shall be called only when new data is available (ON_NEW_DATA) or whether the callback shall always be called (ALWAYS).
- At runtime, all handles are processed in the user-defined order
- if the configuration of handle is ON_NEW_DATA, then the corresponding callback is only called if new data is available
- if the configuration of the handle is ALWAYS, then the corresponding callback is always. If no data is available, then the callback is called with no data (e.g. NULL pointer).
Figure 9 shows three callbacks, A, B and C. Assume, they shall be executed in the order B,A,C. Then the user adds the callbacks to the rclc Executor in this order. Whenever new messages have arrived then the callbacks for which a new message is availabe will be always executed in the user-defined processing order.
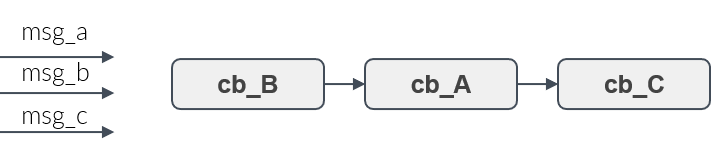
Trigger condition
- Given a set of handles, a trigger condition, which is based on the availability of input data of these handles, decides when the processing of all callbacks starts. This is shown in Figure 10.
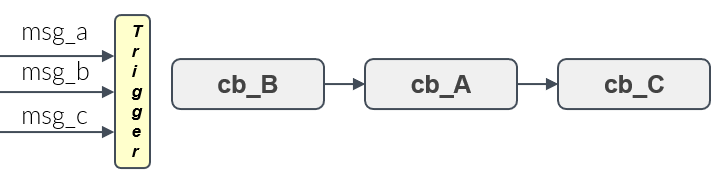
- Available options:
- ALL operation: fires when input data is available for all handles
- ANY operation: fires when input data is available for at least one handle (OR semantics)
- ONE: fires when input data for a user-specified handle is available
- User-defined function: user can implement custom logic
Figure 11 shows an example of the ALL semantics. Only if all messages msg_A, msg_B, msg_C were received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order.
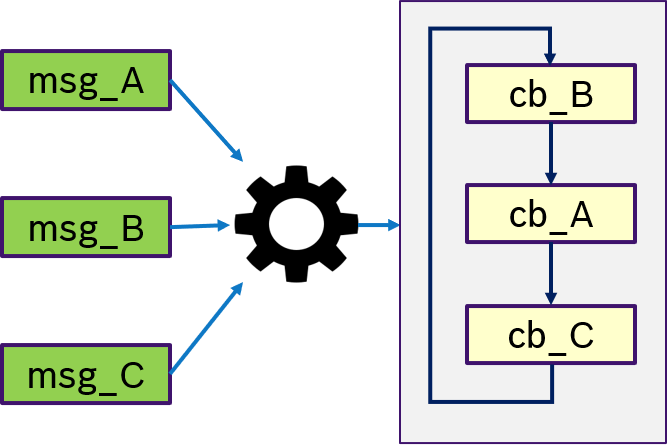
Figure 12 shows an example of the ANY semantics. Thas is, if any messages msg_A, msg_B, msg_C was received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order. This is equivalent to OR semantics.
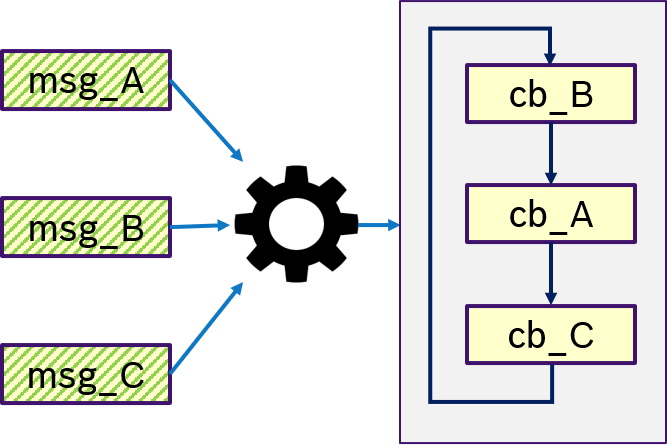
Figure 13 shows an example of the ONE semantics. Thas is, only if message msg_B was received, the trigger condition is fullfilled and (potentially all) callbacks are processed in a user-defined order.
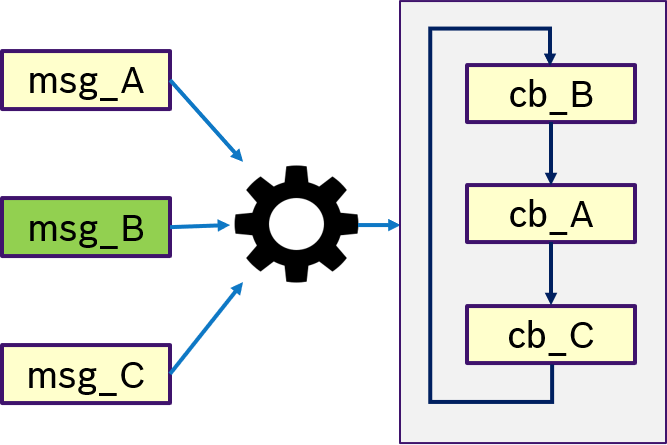
Figure 14 describes the custom semantics. A custom trigger condition with could be a more complex logic of multiple messages, can be passed to the executor. This might also include hardware triggers, like interrupts.
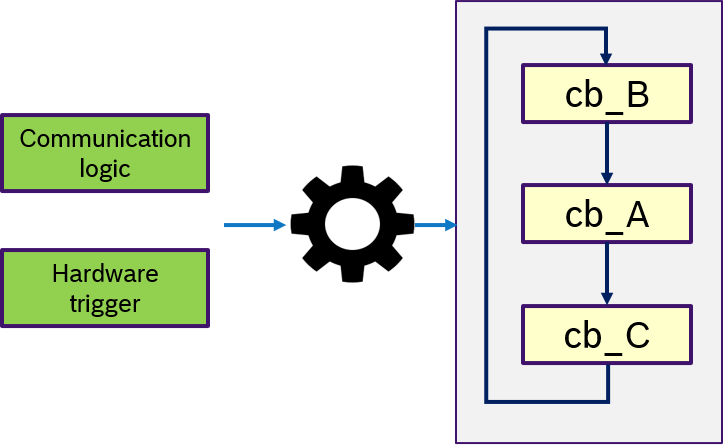
LET-Semantics
- Assumption: time-triggered system, the executor is activated periodically
- When the trigger fires, reads all input data and makes a local copy
- Processes all callbacks in sequential order
- Write output data at the end of the executor's period (Note: this is not implemented yet)
Additionally we have implemented the current rclcpp Executor semantics ("RCLCPP"): - waiting for new data for all handles (rcl_wait) - using trigger condition ANY - if trigger fires, start processing handles in pre-defined sequential order - request from DDS-queue the new data just before the handle is executed (rcl_take)
The selection of the Executor semantics is optional. The default semantics is "RCLCPP".
Multi-threading and scheduling configuration
The rclc Executor has been extended for multi-threading. It supports the assignment of scheduling policies, like priorities or more advanced scheduling algorithms as reservation-based scheduling, to subscription callbacks. [Pull Request, Pre-print SLD2021]. The overall architecture is shown in Figure 15. One Executor thread is responsible for checking for new data from the DDS queue. For every callback, a thread is spawned with the dedicted scheduling policy provided by the operating system. The Executor then dispatches new data of a subscription to it's corresponding callback function, which is then executed in its own thread by operating system.
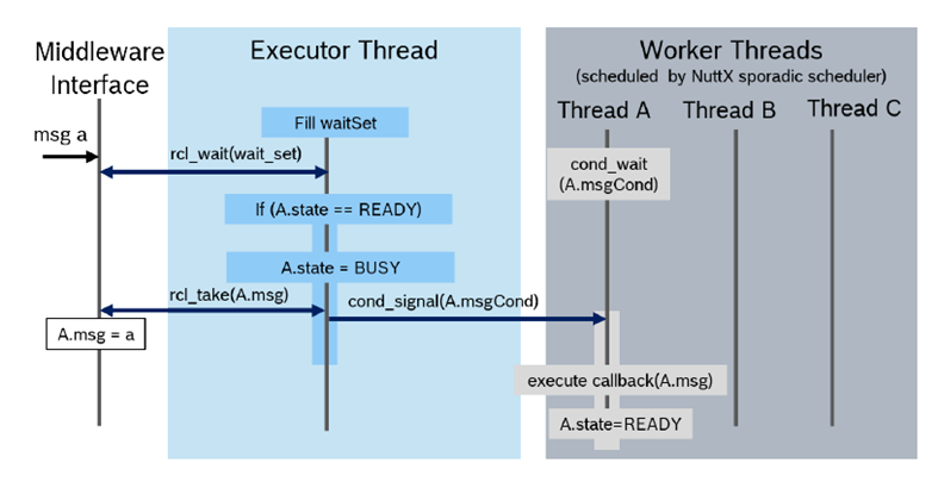
Executor API
The API of the rclc Executor can be divided in two phases: Configuration and Running.
Configuration phase
During the configuration phase, the user shall define: - the total number of callbacks - the sequence of the callbacks - trigger condition (optional, default: ANY) - data communcation semantics (optional, default ROS2)
As the Executor is intended for embedded controllers, dynamic memory management is crucial. Therefore at initialization of the rclc Executor, the user defines the total number of callbacks. The necessary dynamic memory will be allocated only in this phase and no more memory in the running phase. This makes this Executor static in the sense, that during runtime no additional callbacks can be added.
Then, the user adds handles and the corresponding callbacks (e.g. for subscriptions and timers) to the Executor. The order in which this takes place, defines later the sequential processing order during runtime.
For each handle the user can specify, if the callback shall be executed only if new data is available (ON_NEW_DATA) or if the callback shall always be executed (ALWAYS). The second option is useful when the callback is expected to be called at a fixed rate.
The trigger condition defines when the processing of these callbacks shall start. For convenience some default conditions have been defined:
- trigger_any(default) : start executing if any callback has new data
- trigger_all : start executing if all callbacks have new data
- trigger_one(&data) : start executing if data has been received
- user_defined_function: the user can also define its own function with more complex logic
With 'trigger_any' being the default, the current semantics of the rclcpp Executor is selected.
The data communication semantics can be - ROS2 (default) - LET
To be compatible with ROS2 rclcpp Executor, the existing rclcpp semantics is implemented as 'ROS2'. That is, with the spin-function the DDS-queue is constantly monitored for new data (rcl_wait). If new data becomes available, then is fetched from DDS (rcl_take) immediately before the callback is executed. All callbacks are processed in the user-defined order, this is the only difference to the rclcpp Executor, in which no order can be specified.
Secondly, the LET semantics is implemented such that at the beginning of processing all available data is fetched (rcl_take) and buffered and then the callbacks are processed in the pre-defined operating on the buffered copy.
Running phase
As the main functionality, the Executor has a spin-function which constantly checks for new data at the DDS-queue, like the rclcpp Executor in ROS2. If the trigger condition is satisfied then all available data from the DDS queue is processed according to the specified semantics (ROS or LET) in the user-defined sequential order. After all callbacks have been processed the DDS is checked for new data again.
Available spin functions are
- spin_some - spin one time
- spin_period - spin with a period
- spin - spin indefinitly
Examples
We provide the relevant code snippets how to setup the rclc Executor for the processing patterns as described above.
Sense-plan-act pipeline in robotics example
In this example we want to realise a sense-plan-act pipeline in a single thread. The trigger condition is demonstrated by activating
the sense-phase when both data for the Laser and IMU are available. Three executors are necessary exe_sense, exe_plan and exe_act. The two sensor acquisition callbacks sense_Laser and sense_IMU are registered in the Executor exe_sense.
The trigger condition ALL is responsible to activate the sense-phase only when all data for these two callbacks are available. Finally all three Executors are spinning using a while-loop and the spin_some function.
The definitions of callbacks are omitted.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act;
rcle_let_executor_t exe_sense, exe_plan, exe_act;
// initialize executors
rclc_executor_init(&exe_sense, &context, 2, ...);
rclc_executor_init(&exe_plan, &context, 1, ...);
rclc_executor_init(&exe_act, &context, 1, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb1, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb2, ON_NEW_DATA);
rclc_let_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// executor for plan-phase
rclc_executor_add_subscription(&exe_plan, &plan, &my_sub_cb3, ON_NEW_DATA);
// executor for act-phase
rclc_executor_add_subscription(&exe_act, &act, &my_sub_cb4, ON_NEW_DATA);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_sense);
rclc_executor_spin_some(&exe_plan);
rclc_executor_spin_some(&exe_act);
}
Synchronization of multiple rates example
The sensor fusion synchronizing the multiple rates with a trigger is shown below.
...
rcl_subscription_t aggr_IMU, sense_Laser, sense_IMU;
rcle_let_executor_t exe_aggr, exe_sense;
// initialize executors
rclc_executor_init(&exe_aggr, &context, 1, ...);
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for aggregate IMU data
rclc_executor_add_subscription(&exe_aggr, &aggr_IMU, &my_sub_cb1, ON_NEW_DATA);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb3, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_aggr);
rclc_executor_spin_some(&exe_sense);
}
The setup for the sensor fusion using sequential execution is shown below.
Note that the sequetial order is sense_IMU, which will request the aggregated IMU message, and then sense_Laser
while the trigger will fire, when a laser message is received.
...
rcl_subscription_t sense_Laser, sense_IMU;
rcle_let_executor_t exe_sense;
// initialize executor
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe_sense);
High priority processing path example
This example shows the sequential processing order to execute the obstacle avoidance obst_avoid
after the callbacks of the sense-phase and before the callback of the planning phase plan.
The control loop is started when a laser message is received. Then an aggregated IMU message is requested,
like in the example above. Then all the other callbacks are always executed. This assumes that these callbacks
communicate via a global data structure. Race conditions cannot occur, because the callbacks
run all in one thread.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act, obst_avoid;
rcle_let_executor_t exe;
// initialize executors
rclc_executor_init(&exe, &context, 5, ...);
// define processing order
rclc_executor_add_subscription(&exe, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe, &obst_avoid, &my_sub_cb3, ALWAYS);
rclc_executor_add_subscription(&exe, &plan, &my_sub_cb4, ALWAYS);
rclc_executor_add_subscription(&exe, &act, &my_sub_cb5, ALWAYS);
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe);
Real-time embedded applications example
With seqential execution the co-operative scheduling of tasks within a process can be modeled. The trigger condition is used to periodically activate the process which will then execute all callbacks in a pre-defined order. Data will be communicated using the LET-semantics. Every Executor is executed in its own tread, to which an appropriate priority can be assigned.
In the following example, the Executor is setup with 4 handles. We assume a process has three subscriptions sub1, sub2, sub3. The sequential processing order is given by the order as they are added to the Executor. A timer timer defines the period. The trigger_one with the paramter timer is used, so that whenever the timer is ready, all callbacks are processed. Finally the data communication semantics LET is defined.
#include "rcl_executor/let_executor.h"
// define subscription callback
void my_sub_cb1(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb2(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb3(const void * msgin)
{
// ...
}
// define timer callback
void my_timer_cb(rcl_timer_t * timer, int64_t last_call_time)
{
// ...
}
// necessary ROS 2 objects
rcl_context_t context;
rcl_node_t node;
rcl_subscription_t sub1, sub2, sub3;
rcl_timer_t timer;
rcle_let_executor_t exe;
// define ROS context
context = rcl_get_zero_initialized_context();
// initialize ROS node
rcl_node_init(&node, &context,...);
// create subscriptions
rcl_subscription_init(&sub1, &node, ...);
rcl_subscription_init(&sub2, &node, ...);
rcl_subscription_init(&sub3, &node, ...);
// create a timer
rcl_timer_init(&timer, &my_timer_cb, ... );
// initialize executor with four handles
rclc_executor_init(&exe, &context, 4, ...);
// define static execution order of handles
rclc_executor_add_subscription(&exe, &sub1, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sub2, &my_sub_cb2, ALWAYS);
rclc_executor_add_subscription(&exe, &sub3, &my_sub_cb3, ALWAYS);
rclc_executor_add_timer(&exe, &timer);
// trigger when handle 'timer' is ready
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &timer);
// select LET-semantics
rclc_executor_data_comm_semantics(&exe, LET);
// spin forever
rclc_executor_spin(&exe);
ROS 2 Executor Workshop Reference System
The rclc Executor has been presented at the workshop 'ROS 2 Executor: How to make it efficient, real-time and deterministic?' at ROS World 2021 (i.e. the online version of ROSCon)[S2021]. A Reference System for testing and benchmarking ROS Executors has been developed for this workshop. The application of the rclc Executor on the reference system with the trigger condition can be found in the rclc-executor branch of the Reference System.
The slides can be downloaded here. All information and the videos and slides of the other talks of the workshop can be found at www.apex.ai/roscon-21.
Future work
- Full LET semantics (writing data at the end of the period)
- one publisher that periodically publishes
- if Executors are running in multiple threads, publishing needs to be atomic
- Multi-threaded executor with assignment of scheduling policies of unerlying operating system. [Pull Request, pre-print SLD2021].
Download
The rclc Executor can be downloaded from the ros2/rclc repository. It is available for the ROS 2 versions Foxy, Galactic and Rolling. The repository provides several packages including the rclc Executor and an rclc_examples package with several application examples.
Callback-group-level Executor
The Callback-group-level Executor was an early prototype for a refined rclcpp Executor API developed in micro-ROS. It has been derived from the default rclcpp Executor and addresses some of the aforementioned deficits. Most important, it was used to validate that the underlying layers (rcl, rmw, rmw_adapter, DDS) allow for multiple Executor instances without any negative interferences.
As the default rclcpp Executor works at a node-level granularity – which is a limitation given that a node may issue different callbacks needing different real-time guarantees - we decided to refine the API for more fine-grained control over the scheduling of callbacks on the granularity of callback groups using. We leverage the callback-group concept existing in rclcpp by introducing real-time profiles such as RT-CRITICAL and BEST-EFFORT in the callback-group API (i.e. rclcpp/callback_group.hpp). Each callback needing specific real-time guarantees, when created, may therefore be associated with a dedicated callback group. With this in place, we enhanced the Executor and depending classes (e.g., for memory allocation) to operate at a finer callback-group granularity. This allows a single node to have callbacks with different real-time profiles assigned to different Executor instances - within one process.
Thus, an Executor instance can be dedicated to specific callback group(s) and the Executor’s thread(s) can be prioritized according to the real-time requirements of these groups. For example, all time-critical callbacks are handled by an "RT-CRITICAL" Executor instance running at the highest scheduler priority.
The following Figure illustrates this approach with two nodes served by three Callback-group-level Executors in one process:
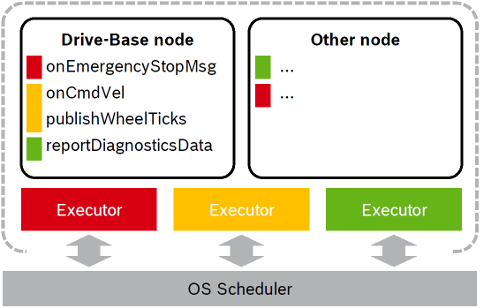
The different callbacks of the Drive-Base node are distributed to different Executors (visualized by the color red, yellow and green). For example the onCmdVel and publishWheelTicks callback are scheduled by the same Executor (yellow). Callbacks from different nodes can be serviced by the same Executor.
API Changes
In this section, we describe the necessary changes to the Executor API: * include/rclcpp/callback_group.hpp:
* Introduced an enum to distinguish up to three real-time classes (requirements) per node (RealTimeCritical, SoftRealTime, BestEffort)
* Changed association with Executor instance from nodes to callback groups.
-
- Added functions to add and remove individual callback groups in addition to whole nodes.
- Replaced private vector of nodes with a map from callback groups to nodes.
-
include/rclcpp/memory_strategy.hpp
- Changed all functions that expect a vector of nodes to the just mentioned map.
-
include/rclcpp/node.hpp and include/rclcpp/node_interfaces/node_base.hpp
- Extended arguments of create_callback_group function for the real-time class.
- Removed the get_associated_with_executor_atomic function.
The callback-group-level executor has been merged into ROS 2 rclcpp in pull request 1218.
Test Bench
As a proof of concept, we implemented a small test bench in the present package cbg-executor_ping-pong_cpp. The test bench comprises a Ping node and a Pong node which exchange real-time and best-effort messages simultaneously with each other. Each class of messages is handled with a dedicated Executor, as illustrated in the following Figure.
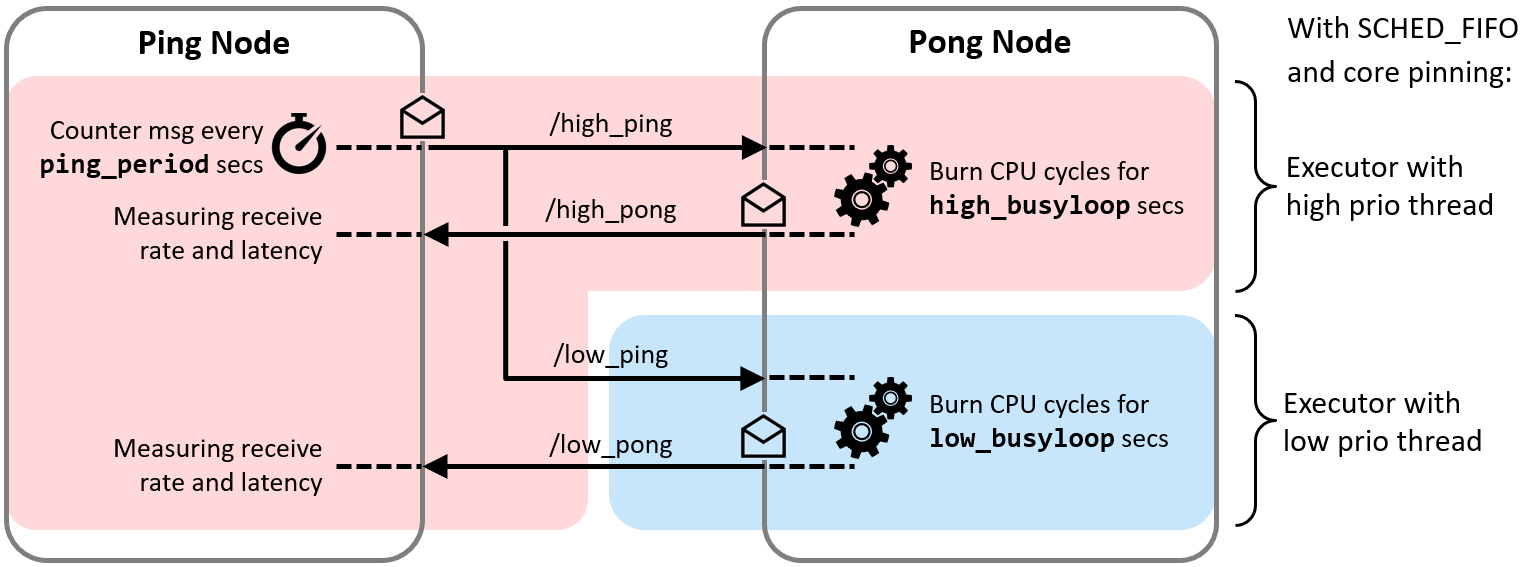
With the test bench, we validated the functioning of the approach.
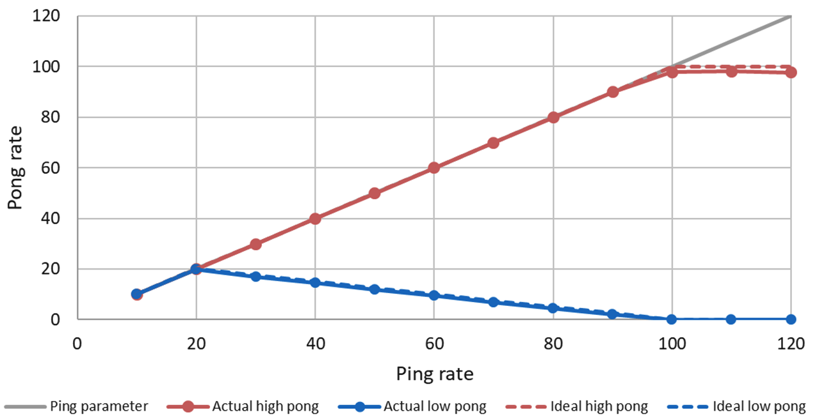
In this example, the callback for the high priority task (red line) consumes 10ms and the low priority task (blue line) 40ms in the Pong Node. With a ping rate of 20 Hz, the CPU saturates (10ms*20+40ms*20=1000ms). With higher frequencies the high priorty task can continue to send its pong message, while the low priority pong task degrades. With a frequency of 100Hz the high priority task requires 100% CPU utilization. With higher ping rates it keeps sending pong messages with 100Hz, while the low priority task does not get any CPU ressources any more and cannot send any messages.
The test bench is provided in the cbg_executor_demo.
Related Work
In this section, we provide an overview to related approaches and link to the corresponding APIs.
Fawkes Framework
Fawkes is a robotic software framework, which supports synchronization points for sense-plan-act like execution. It has been developed by RWTH Aachen since 2006. Source code is available at github.com/fawkesrobotics.
Synchronization
Fawkes provides developers different synchronization points, which are very useful for defining an execution order of a typical sense-plan-act application. These ten synchronization points (wake-up hooks) are the following (cf. libs/aspect/blocked_timing.h):
- WAKEUP_HOOK_PRE_LOOP
- WAKEUP_HOOK_SENSOR_ACQUIRE
- WAKEUP_HOOK_SENSOR_PREPARE
- WAKEUP_HOOK_SENSOR_PROCESS
- WAKEUP_HOOK_WORLDSTATE
- WAKEUP_HOOK_THINK
- WAKEUP_HOOK_SKILL
- WAKEUP_HOOK_ACT
- WAKEUP_HOOK_ACT_EXEC
- WAKEUP_HOOK_POST_LOOP
Configuration at compile time
At compile time, a desired synchronization point is defined as a constructor parameter for a module. For example, assuming that mapLaserGenThread shall be executed in SENSOR_ACQUIRE, the constructor is implemented as:
MapLaserGenThread::MapLaserGenThread()
:: Thread("MapLaserGenThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_ACQUIRE),
TransformAspect(TransformAspect::BOTH_DEFER_PUBLISHER, "Map Laser Odometry")
Similarly, if NaoQiButtonThread shall be executed in the SENSOR_PROCESS hook, the constructor is:
NaoQiButtonThread::NaoQiButtonThread()
:: Thread("NaoQiButtonThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_PROCESS)
Runtime execution
At runtime, the Executor iterates through the list of synchronization points and executes all registered threads until completion. Then, the threads of the next synchronization point are called.
A module (thread) can be configured independent of these sense-plan-act synchronization points. This has the effect, that this thread is executed in parallel to this chain.
The high level overview of the Fawkes framework is shown in the next figure. At compile-time the configuration of the sense-plan act wakeup hook is done (upper part), while at run-time the scheduler iterates through this list of wakeup-hooks (lower part):
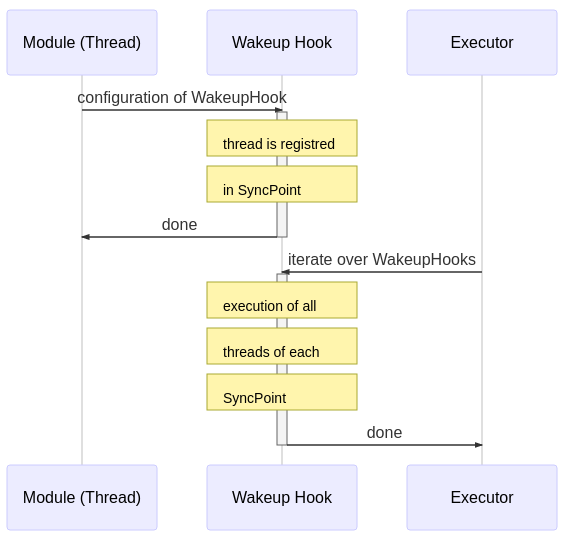
Hence, at run-time, the hooks are executed as a fixed static schedule without preemption. Multiple threads registered in the same hook are executed in parallel.
Orthogonal to the sequential execution of sense-plan-act like applications, it is possible to define further constraints on the execution order by means of a Barrier. A barrier defines a number of threads, which need to have finished before the thread can start, which owns the barrier.
These concepts are implemented by the following main classes:
-
Wakeup hook by
SyncPointandSyncPointManager, which manages a list of synchronization points. -
Executor by the class
FawkesMainThread, which is the scheduler, responsible for calling the user threads. -
ThreadManager, which is derived fromBlockedTimingExecutor, provides the necessary API to add and remove threads to wakeup hooks as well as for sequential execution of the wakeup-hooks. -
Barrieris an object similar tocondition_variablein C++.
Discussion
All threads are executed with the same priority. If multiple sense-plan-act chains shall be executed with different priorities, e.g. to prefer execution of emergency-stop over normal operation, then this framework reaches its limits.
Also, different execution frequencies cannot be modeled by a single instance of this sense-plan-act chain. However, in robotics the fastest sensor will drive the chain and all other hooks are executed with the same frequency.
The option to execute threads independent of the predefined wakeup-hooks is very useful, e.g. for diagnostics. The concept of the Barrier is useful for satisfying functional dependencies which need to be considered in the execution order.
References
[S2021] J. Staschulat, "Micro-ROS: The rclc Executor", in Workshop ROS 2 Executor: How to make it efficient, real-time and deterministic? at ROS World, Oct. 2021, [slides] [Video]
[SLD2021] J. Staschulat, R. Lange and D. N. Dasari, "Budget-based real-time Executor for Micro-ROS", arXiv Pre-Print, May 2021. [paper]
[L2020] Ralph Lange: Advanced Execution Management with ROS 2, ROS-Industrial Conference, Dec 2020 [Slides]
[SLL2020] J. Staschulat, I. Lütkebohle and R. Lange, "The rclc Executor: Domain-specific deterministic scheduling mechanisms for ROS applications on microcontrollers: work-in-progress," 2020 International Conference on Embedded Software (EMSOFT), Singapore, Singapore, 2020, pp. 18-19. [Paper] [Video]
[CB2019] D. Casini, T. Blaß, I. Lütkebohle, B. Brandenburg: Response-Time Analysis of ROS 2 Processing Chains under Reservation-Based Scheduling, in Euromicro-Conference on Real-Time Systems 2019. [Paper] [slides]
[L2018] Ralph Lange: Callback-group-level Executor for ROS 2. Lightning talk at ROSCon 2018. Madrid, Spain. Sep 2018. [Slides] [Video]
[EK2018] R. Ernst, S. Kuntz, S. Quinton, M. Simons: The Logical Execution Time Paradigm: New Perspectives for Multicore Systems, February 25-28 2018 (Dagstuhl Seminar 18092). [Paper]
[NSP2018] A. Naderlinger, S. Resmerita, and W. Pree: LET for Legacy and Model-based Applications, Proceedings of The Logical Execution Time Paradigm: New Perspectives for Multicore Systems (Dagstuhl Seminar 18092), Wadern, Germany, February 2018.
[BP2017] A. Biondi, P. Pazzaglia, A. Balsini, M. D. Natale: Logical Execution Time Implementation and Memory Optimization Issues in AUTOSAR Applications for Multicores, International Worshop on Analysis Tools and Methodologies for Embedded and Real-Time Systems (WATERS2017), Dubrovnik, Croatia.[Paper]
[KZH2015] S. Kramer, D. Ziegenbein, and A. Hamann: Real World Automotive Benchmarks For Free, International Workshop on Analysis Tools and Methodologies for Embedded adn Real-Time Sysems (WATERS), 2015.
[HHK2001] Henzinger T.A., Horowitz B., Kirsch C.M. (2001) Giotto: A Time-Triggered Language for Embedded Programming. In: Henzinger T.A., Kirsch C.M. (eds) Embedded Software. EMSOFT 2001. Lecture Notes in Computer Science, vol 2211. Springer, Berlin, Heidelberg
[LL1973] Liu, C. L.; Layland, J.:Scheduling algorithms for multiprogramming in a hard real-time environment, Journal of the ACM, 20 (1): 46–61, 1973.
Changelog for package rclc
2.0.6 (2022-01-25)
- [backport galactic, foxy] data_available optimization (#212)
- Fix data_available reset for timer (#215) (#216)
- Executor ignore canceled timers (#220) (#221)
- Resolved error in unit test see issue #230 (#231) (#232)
- Updated documentation README.md (#229)
2.0.5 (2021-11-08)
- Fix printf in executor spin
- Fix init options handling
2.0.4 (2021-08-19)
- Refactoring: remove callback_type
- Improvement: Checking for valid ROS context in spin_some
- Bug fix: Ignoring unsuccessful SERVICE_TAKE
- Bug fix: Updated ci workflow dependency on galactic
- Improvement: Updated codecov configuration to ignore unit tests
2.0.3 (2021-07-26)
- Updated codecov to ignore test folders
- Updated bloom release status table
2.0.2 (2021-07-17)
- Added rclc_parameter package
- Added quality of service entity creation API
- Addded executor_prepare API
- Added support for removing subscription from executor
- Added support for subscription with context
- Updated compatability function for sleep
- Removed duplicate NOTICE files
2.0.1 (2021-05-28)
- added quality declaration
2.0.0 (2021-04-23)
- added codecov support
- new API of rcl_lifecycle in Rolling required major version bump
1.0.1 (2021-03-29)
- Windows port
- Compatibility sleep function (Windows, POSIX-OS)
- Fixed RCL lifecycle API change for Rolling
1.0.0 (2021-03-04)
- service callbacks with context
- fixed minor issues unit tests
- upgraded setup_ros action (ci jobs)
- removed Eloquent from ci jobs
0.1.7 (2021-01-20)
- Corrected corrupted changelog
0.1.6 (2021-01-20)
- Fixed issues due to Github Action timing delays on cloud build
- Fixed missing package dependency in Github Action for Eloquent
0.1.5 (2020-12-11)
- Added support for services,clients and guard_conditions to rclc executor
- Added table for bloom release status in README file
0.1.4 (2020-11-25)
- Fixed error in bloom release
0.1.3 (2020-11-23)
- Added rclc_lifecycle package
- Change maintainer information
- Minor fixes, updated unit tests
0.1.2 (2020-05-19)
- Fixed compiler errors for bloom release
0.1.1 (2020-05-14)
- Initial release
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Launch files
Messages
Services
Plugins
Recent questions tagged rclc at Robotics Stack Exchange
|
|
rclc package from rclc reporclc rclc_examples rclc_lifecycle rclc_parameter |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.1.2 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/ros2/rclc.git |
| VCS Type | git |
| VCS Version | foxy |
| Last Updated | 2023-06-12 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Jan Staschulat
- Pablo Garrido
Authors
- Jan Staschulat
- William Woodall
The rclc package
Table of contents
Introduction
Predictable execution under given real-time constraints is a crucial requirement for many robotic applications. While the service-based paradigm of ROS allows a fast integration of many different functionalities, it does not provide sufficient control over the execution management. For example, there are no mechanisms to enforce a certain execution order of callbacks within a node. Also the execution order of multiple nodes is essential for control applications in mobile robotics. Cause-effect-chains comprising of sensor acquisition, evaluation of data and actuation control should be mapped to ROS nodes executed in this order, however there are no explicit mechanisms to enforce it. Furthermore, when data recordings collected in field tests as ROS-bags are re-played, then the results are often surprisingly different due to non-determinism of process scheduling.
Manually setting up a particular execution order of subscriptions and publishing topics as well as defining use-case specific priorities of the corresponding Linux processes is always possible. However, this approach is error-prone, difficult to extend and requires an in-depth knowledge of the deployed ROS 2 packages in the system.
Therefore the goal of the Executor in micro-ROS is to support roboticists with practical and easy-to-use real-time mechanisms which provide solutions for: - Deterministic execution - Real-time guarantees - Integration of real-time and non real-time functionalities on one platform - Specific support for RTOS and microcontrollers
In ROS 1 a network thread is responsible for receiving all messages and putting them into a FIFO queue (in roscpp). That is, all callbacks were called in a FIFO manner, without any execution management. With the introduction of DDS (data distribution service) in ROS 2, the messages are buffered in DDS. In ROS 2, an Executor concept was introduced to support execution management. At the rcl-layer, a wait-set is configured with handles to be received and in a second step, the handles are taken from the DDS-queue. A handle is a generic term defined in rcl-layer for timers, subscriptions, services, clients and guard conditions.
The standard implementation of the ROS 2 Executor for the C++ API (rclcpp) has, however, certain unusual features, like precedence of timers over all other DDS handles, non-preemptive round-robin scheduling for non-timer handles and considering only one input data for each handle (even if multiple could be available). These features have the consequence, that in certain situations the standard rclcpp Executor is not deterministic and it makes guaranteeing real-time requirements very hard [CB2019]. We have not looked at the ROS 2 Executor implementation for Python Frontend (rclpy) because we consider a micro-controllers platform, on which typically C or C++ appliations will run.
Given the goals for a Real-Time Executor and the limitations of the ROS 2 standard rclcpp Executor, the challenges are: - to develop an adequate and well-defined scheduling mechanisms for the ROS 2 framework and the real-time operating system (RTOS) - to define an easy-to-use interface for ROS developers - to model requirements (like latencies, determinism in subsystems) - mapping of ROS 2 framework and operating system schedulers (semi-automated and optimized mapping is desired as well as generic, well-understood framework mechanisms)
Our approach is to provide a real-time-capable Executor for the rcl+rclc layer (as described in section Introduction to Client Library.) in the C programming language .
As the first step, we propose the rclc Executor for the rcl-layer in C programming language with several new features to support real-time and deterministic execution: It supports 1.) user-defined static sequential execution, 2) conditional execution semantics, 3) multi-threaded execution with scheduling configuration, and 4) logical execution semantics (LET). Sequential execution refers to the runtime behavior, that all callbacks are executed in a pre-defined order independent of the arrival time of messages. Conditional execution is available with a trigger condition which enables typical processing patterns in robotics (which are analyzed in detail in section Analysis of processing patterns. Configuration of scheduling parameters for multi-threaded application accomplishes prioritized execution. The logical execution time concept (LET) provides data synchronization for fixed periodic task scheduling of embedded applications.
Beyond the advanced execution management mechanisms for micro-ROS, we also contributed to improving and extending the Executor concept in rclcpp for standard ROS 2: the callback group-level Executor. It is not a new Executor but rather a refinement of the ROS 2 Executor API allowing to prioritize a group of callbacks which is not possible with the ROS 2 default Executor in its current Galactic release.
Analysis of rclcpp standard Executor
ROS 2 allows to bundle multiple nodes in one operating system process. To coordinate the execution of the callbacks of the nodes of a process, the Executor concept was introduced in rclcpp (and also in rclpy).
The ROS 2 design defines one Executor (instance of rclcpp::executor::Executor) per process, which is typically created either in a custom main function or by the launch system. The Executor coordinates the execution of all callbacks issued by these nodes by checking for available work (timers, services, messages, subscriptions, etc.) from the DDS queue and dispatching it to one or more threads, implemented in SingleThreadedExecutor and MultiThreadedExecutor, respectively.
The dispatching mechanism resembles the ROS 1 spin thread behavior: the Executor looks up the wait sets, which notifies it of any pending callback in the DDS queue. If there are multiple pending callbacks, the ROS 2 Executor executes them in an in the order as they were registered at the Executor.
Architecture
The following diagram depicts the relevant classes of the standard ROS 2 Executor implementation:
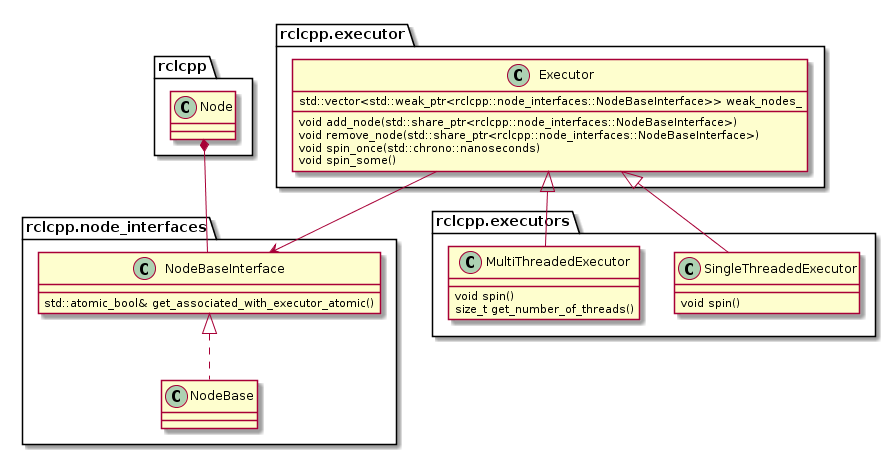
Note that an Executor instance maintains weak pointers to the NodeBaseInterfaces of the nodes only. Therefore, nodes can be destroyed safely, without notifying the Executor.
Also, the Executor does not maintain an explicit callback queue, but relies on the queue mechanism of the underlying DDS implementation as illustrated in the following sequence diagram:
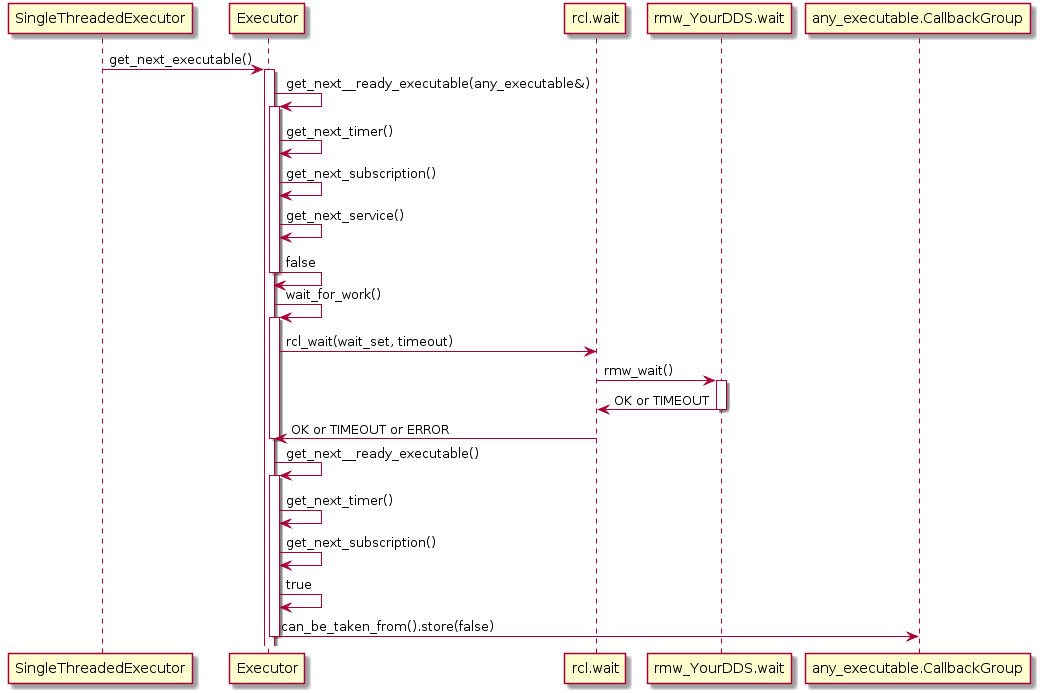
The Executor concept, however, does not provide means for prioritization or categorization of the incoming callback calls. Moreover, it does not leverage the real-time characteristics of the underlying operating-system scheduler to have finer control on the order of executions. The overall implication of this behavior is that time-critical callbacks could suffer possible deadline misses and a degraded performance since they are serviced later than non-critical callbacks. Additionally, due to the FIFO mechanism, it is difficult to determine usable bounds on the worst-case latency that each callback execution may incur.
Scheduling Semantics
In a recent paper [CB2019], the rclcpp Executor has been analyzed in detail and a response time analysis of cause-effect chains has been proposed under reservation-based scheduling. The Executor distinguishes four categories of callbacks: timers, which are triggered by system-level timers, subscribers, which are triggered by new messages on a subscribed topic, services, which are triggered by service requests, and clients, which are triggered by responses to service requests. The Executor is responsible for taking messages from the input queues of the DDS layer and executing the corresponding callback. Since it executes callbacks to completion, it is a non-preemptive scheduler, However it does not consider all ready tasks for execution, but only a snapshot, called readySet. This readySet is updated when the Executor is idle and in this step it interacts with the DDS layer updating the set of ready tasks. Then for every type of task, there are dedicated queues (timers, subscriptions, services, clients) which are processed sequentially. The following undesired properties were pointed out:
- Timers have the highest priority. The Executor processes timers always first. This can lead to the intrinsic effect, that in overload situations messages from the DDS queue are not processed.
- Non-preemptive round-robin scheduling of non-timer handles. Messages arriving during the processing of the readySet are not considered until the next update, which depends on the execution time of all remaining callbacks. This leads to priority inversion, as lower-priority callbacks may implicitly block higher-priority callbacks by prolonging the current processing of the readySet.
- Only one message per handle is considered. The readySet contains only one task instance, For example, even if multiple messages of the same topic are available, only one instance is processed until the Executor is idle again and the readySet is updated from the DDS layer. This aggravates priority inversion, as a backlogged callback might have to wait for multiple processing of readySets until it is considered for scheduling. This means that non-timer callback instances might be blocked by multiple instances of the same lower-priority callback.
Due to these findings, the authors present an alternative approach to provide determinism and to apply well-known schedulability analyses to a ROS 2 systems. A response time analysis is described under reservation-based scheduling.
Analysis of processing patterns
The development of an execution management mechanism for micro-ROS is based on an analysis of processing patterns commonly used in robotics and embedded systems. First, typical processing patterns in mobile robotics are presented which are used to implement deterministic behavior. Then, the processing patterns in the real-time embedded systems are analyzed, in which, as a main difference, the time-triggered paradigm is applied to accomplish real-time behavior.
Sense-plan-act pipeline in robotics
Now we describe common software design patterns which are used in mobile robotics to achieve deterministic behavior. For each design pattern we describe the concept and the derived requirements for a deterministic Executor.
Concept:
A common design paradigm in mobile robotics is a control loop, consisting of several phases: A sensing phase to aquire sensor data, a plan phase for localization and path planning and an actuation-phase to steer the mobile robot. Of course, more phases are possible, here these three phases shall serve as an example. Such a processing pipeline is shown in Figure 1.

Typically multiple sensors are used to perceive the environment. For example an IMU and a laser scanner. The quality of localization algorithms highly depend on how old such sensor data is when it is processed. Ideally the latest data of all sensors should be processed. One way to achive this is to execute first all sensor drivers in the sense-phase and then process all algorithms in the plan-phase.
Currently, such a processing order cannot be defined with the default Executor of rclcpp. One could in principle design a data-driven pipeline, however if e.g. the Laser scan is needed by some other callback in the sense-phase as well as in the plan-phase, the processing order of these subscribers is arbitrary.
For this sense-plan-act pattern, we could define one executor for each phase. The plan-phase would be triggered only when all callbacks in the sense-phase have finished.
Derived requirements: - triggered execution
Synchronization of multiple rates
Concept:
Often multiple sensors are being used to sense the environment for mobile robotics. While an IMU sensor provides data samples at a very high rate (e.g., 500 Hz), laser scans are availabe at a much slower frequency (e.g. 10Hz) determined by the revolution time. Then the challenge is, how to deterministically fuse sensor data with different frequencies. This problem is depicted in Figure 2.
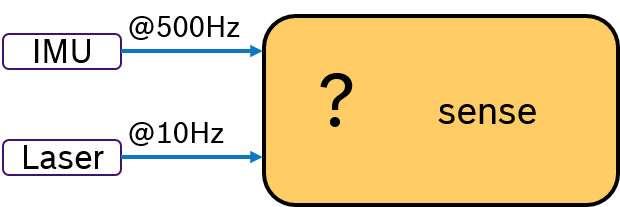
Due to scheduling effects, the callback for evaluating the laser scan might be called just before or just after an IMU data is received. One way to tackle this is to write additional synchronization code inside the application. Obviously, this is a cumbersome and not-portable solution.
An Alternative would be to evalute the IMU sample and the laser scan by synchronizing their frequency. For example by processing always 50 IMU samples with one laser scan. This approach is shown in Figure 3. A pre-processing callback aggregates the IMU samples and sends an aggregated message with 50 samples at 10Hz rate. Now both messages have the same frequency. With a trigger condition, which fires when both messages are available, the sensor fusion algorithm can expect always synchronized input data.
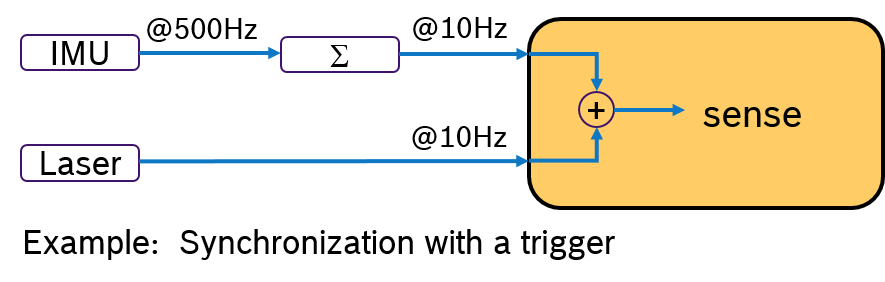
In ROS 2, this is currently not possible to be modeled because of the lack of a trigger concept in the Executors of rclcpp and rclpy. Message filters could be used to synchronize input data based on the timestamp in the header, but this is only available in rclcpp (and not in rcl). Further more, it would be more efficient to have such a trigger concept directly in the Executor.
Another idea would be to activly request for IMU data only when a laser scan is received. This concept is shown in Figure 4. Upon arrival of a laser scan mesage, first, a message with aggregated IMU samples is requested. Then, the laser scan is processed and later the sensor fusion algorithm. An Executor, which would support sequential execution of callbacks, could realize this idea.
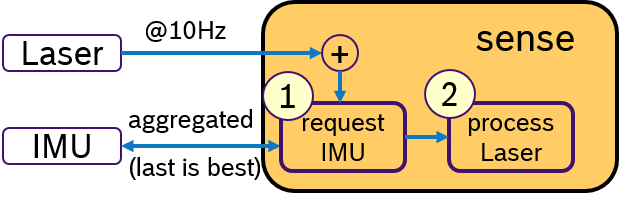
Derived requirements: - triggered execution - sequential procesing of callbacks
High-priority processing path
Concept Often a robot has to fullfill several activities at the same time. For example following a path and avoiding obstacles. While path following is a permanent activity, obstacle avoidance is trigged by the environment and should be immediately reacted upon. Therefore one would like to specify priorities to activities. This is depicted in Figure 5:
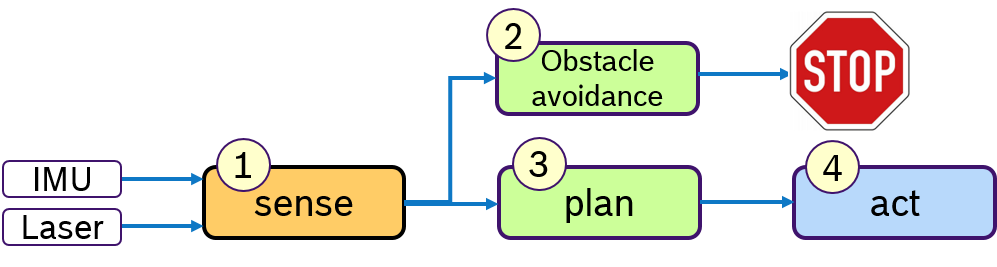
Assuming a simplified control loop with the activities sense-plan-act, the obstacle avoidance, which might temporarily stop the robot, should be processed before the planning phase. In this example we assume that these activites are processed in one thread.
Derived requirements: - sequential processing of callbacks
Real-time embedded applications
In embedded systems, real-time behavior is approached by using the time-triggered paradigm, which means that the processes are periodically activated. Processes can be assigned priorities to allow pre-emptions. Figure 6 shows an example, in which three processes with fixed periods are shown. The middle and lower process are preempted multiple times depicted with empty dashed boxes.
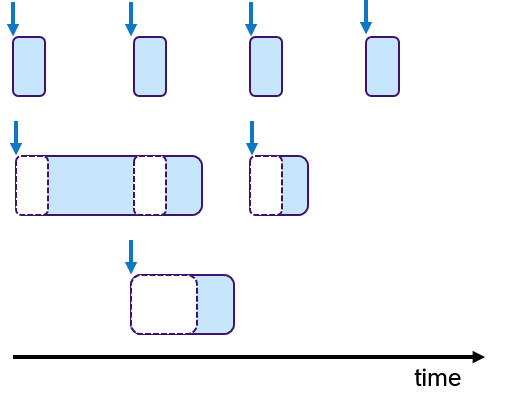
To each process one or multiple tasks can be assigned, as shown in Figure 7. These tasks are executed sequentially, which is often called cooperative scheduling.
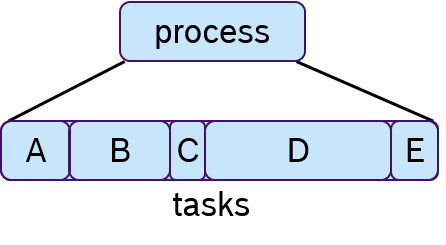
While there are different ways to assign priorities to a given number of processes, the rate-monotonic scheduling assignment, in which processes with a shorter period have a higher priority, has been shown optimal if the processor utilization is less than 69% [LL1973].
In the last decades many different scheduling approaches have been presented, however fixed-periodic preemptive scheduling is still widely used in embedded real-time systems [KZH2015]. This becomes also obvious, when looking at the features of current operating systems. Like Linux, real-time operating systems, such as NuttX, Zephyr, FreeRTOS, QNX etc., support fixed-periodic preemptive scheduling and the assignment of priorities, which makes the time-triggered paradigm the dominant design principle in this domain.
However, data consistency is often an issue when preemptive scheduling is used and if data is being shared across multiple processes via global variables. Due to scheduling effects and varying execution times of processes, writing and reading these variables could occur sometimes sooner or later. This results in an latency jitter of update times (the timepoint at which a variable change becomes visible to other processes). Race conditions can occur when multiple processes access a variable at the same time. So solve this problem, the concept of logical-execution time (LET) was introduced in [HHK2001], in which communication of data occurs only at pre-defined periodic time instances: Reading data only at the beginning of the period and writing data only at the end of the period. The cost of an additional latency delay is traded for data consistency and reduced jitter. This concept has also recently been applied to automotive applications[NSP2018].
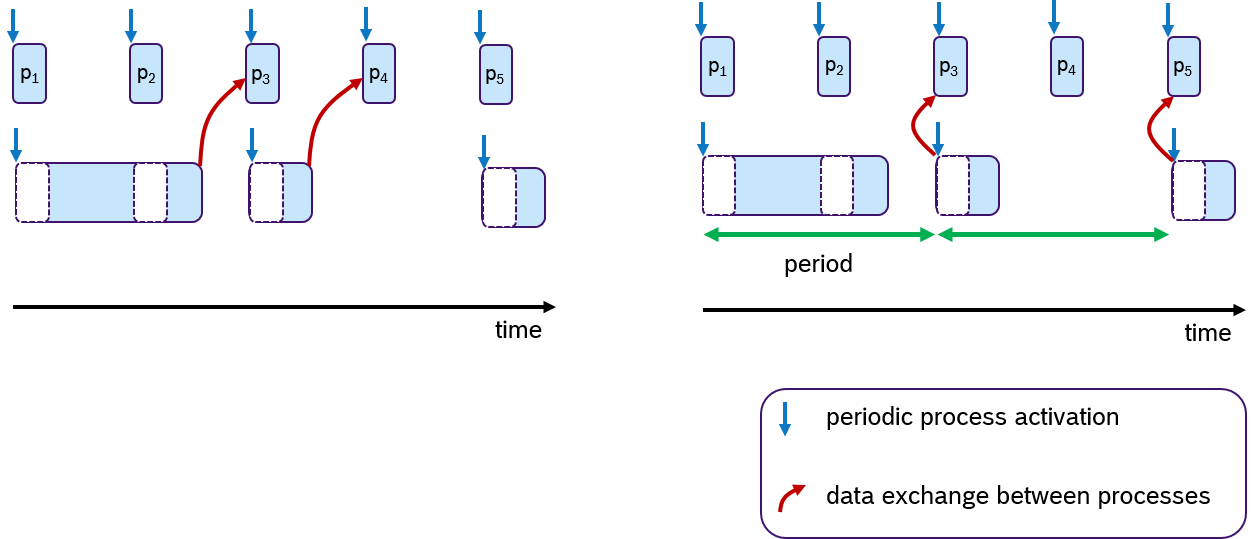
An Example of the LET concept is shown in Figure 8. Assume that two processes are communicating data via one global variable. The timepoint when this data is written is at the end of the processing time. In the default case (left side), the process p3 and p4 receive the update. At the right side of Figure 8, the same scenario is shown with LET semantics. Here, the data is communicated only at period boundaries. In this case, the lower process communicates at the end of the period, so that always process p3 and p5 receive the new data.
Concept: - periodic execution of processes - assignment of fixed priorities to processes - preemptive scheduling of processes - co-operative scheduling of tasks within a process (sequential execution) - data synchronization with LET-semantics
While periodic activation is possible in ROS 2 by using timers, preemptive scheduling is supported by the operating system and assigning priorities on the granularity of threads/processes that correspond to the ROS nodes; it is not possible to sequentially execute callbacks, which have no data-dependency. Furthermore data is read from the DDS queue just before the callback is executed and data is written sometime during the time the application is executed. While the spin_period function of the rclcpp Executor allows to check for data at a fixed period and executing those callbacks for which data is available, however, with this spin-function does not execute all callbacks irrespective wheter data is available or not. So spin_period is not helpful to periodically execute a number of callbacks (aka tasks within a process). So we need a mechanism that triggers the execution of multiple callbacks (aka tasks) based on a timer. Data transmission is achieved via DDS which does not allow to implement a LET-semantics. To summarize, we derive the following requirements.
Derived requirements: - trigger the execution - sequential processing of callbacks - data synchronization with LET semantics
rclc Executor
The rclc Executor is a ROS 2 Executor based on the rcl-layer in C programming language. As discussed above, the default rclcpp Executor is not suitable to implement real-time applications because of three main reasons: timers are preferred over all other handles, no priorization of callback execution and the round-robin to completion execution of callbacks. On the other hand, several processing patterns have been developed as best practices to achieve non-functional requirements, such as bounded end-to-end latencies, low jitter of response times of cause-effect chains, deterministic processing and short response times even in overload situations. These processing patterns are difficult to implement with the concepts availabe in the default ROS 2 Executor, therefore we have developed a flexible Executor: the rclc Executor.
Features
The rclc Executor is feature-complete, i.e. it supports all event types as the default ROS 2 Executor, which are: - subscriptions - timers - services - clients - guard conditions - actions - lifecycle
The flexible rclc Executor provides on top the following new features: - triggered execution - user-defined sequential execution - multi-threading and scheduling configuration (WIP) - LET-semantics for data synchronization of periodic process scheduling
First, a trigger condition allows to define when the processing of a callback shall start. This is useful to implement sense-plan-act control loops or more complex processing structures with directed acyclic graphs. Second, a user can specify the processing order in which these callbacks will be executed. With this feature, the pattern of sensor fusion with multiple rates, in which data is requested from a sensor based on the arrival of some other sensor, can be easily implemented. Third, the assignment of scheduling parameters (e.g., priorities) of the underlying operating system. With this feature, prioritized processing can be implemented. Finally, for periodic applications, the LET Semantics has been implemented to support data consistency for periodic process scheduling. These features are now described in more detail.
Sequential execution
- At configuration, the user defines the order of handles.
- At configuration, the user defines whether the handle shall be called only when new data is available (ON_NEW_DATA) or whether the callback shall always be called (ALWAYS).
- At runtime, all handles are processed in the user-defined order
- if the configuration of handle is ON_NEW_DATA, then the corresponding callback is only called if new data is available
- if the configuration of the handle is ALWAYS, then the corresponding callback is always. If no data is available, then the callback is called with no data (e.g. NULL pointer).
Figure 9 shows three callbacks, A, B and C. Assume, they shall be executed in the order B,A,C. Then the user adds the callbacks to the rclc Executor in this order. Whenever new messages have arrived then the callbacks for which a new message is availabe will be always executed in the user-defined processing order.
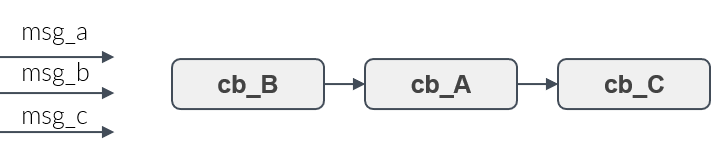
Trigger condition
- Given a set of handles, a trigger condition, which is based on the availability of input data of these handles, decides when the processing of all callbacks starts. This is shown in Figure 10.
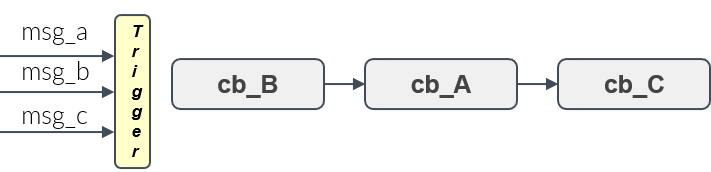
- Available options:
- ALL operation: fires when input data is available for all handles
- ANY operation: fires when input data is available for at least one handle (OR semantics)
- ONE: fires when input data for a user-specified handle is available
- User-defined function: user can implement custom logic
Figure 11 shows an example of the ALL semantics. Only if all messages msg_A, msg_B, msg_C were received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order.
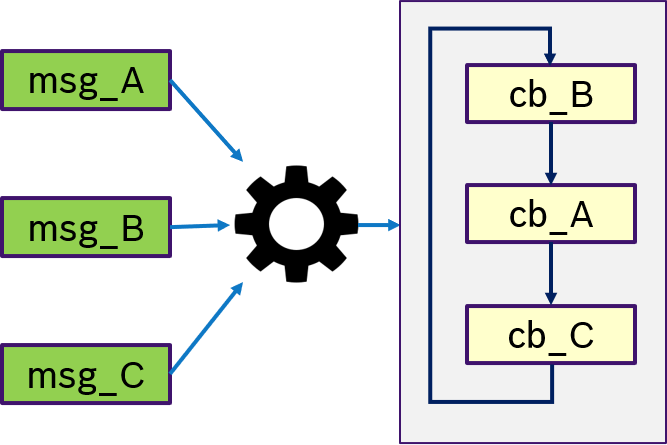
Figure 12 shows an example of the ANY semantics. Thas is, if any messages msg_A, msg_B, msg_C was received, then trigger condition is fullfilled and the callbacks are processed in a user-defined order. This is equivalent to OR semantics.
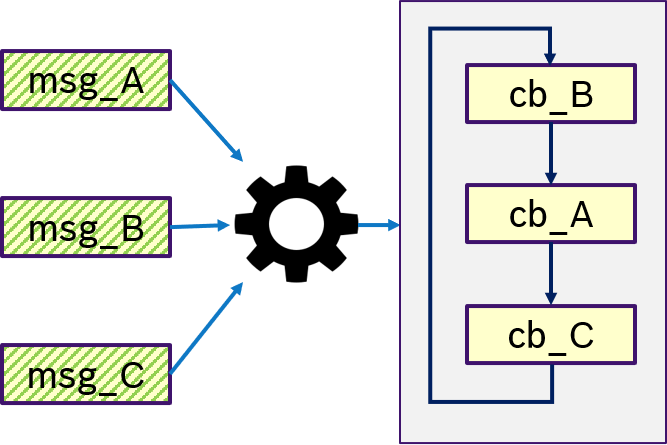
Figure 13 shows an example of the ONE semantics. Thas is, only if message msg_B was received, the trigger condition is fullfilled and (potentially all) callbacks are processed in a user-defined order.
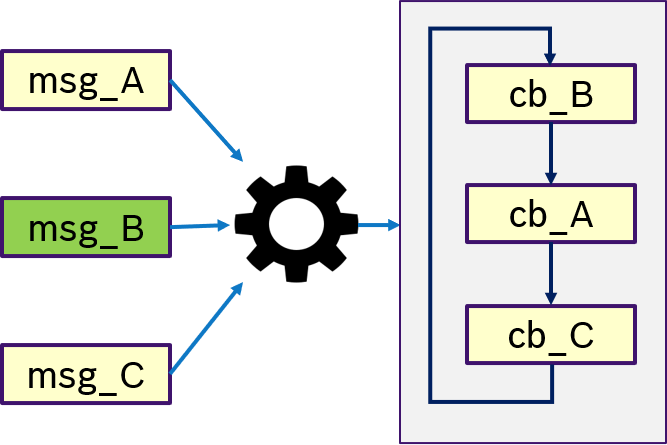
Figure 14 describes the custom semantics. A custom trigger condition with could be a more complex logic of multiple messages, can be passed to the executor. This might also include hardware triggers, like interrupts.
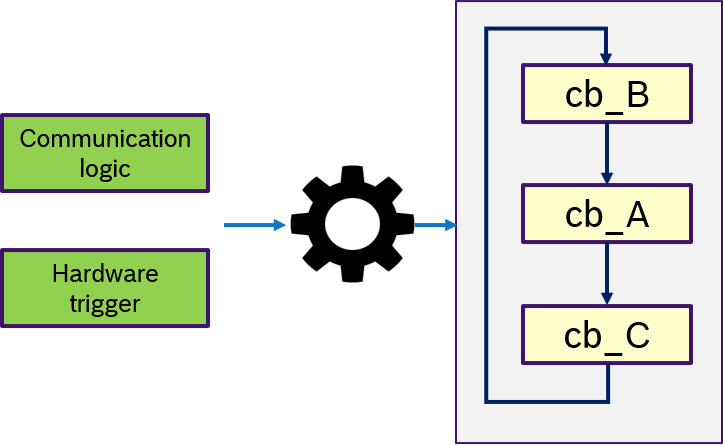
LET-Semantics
- Assumption: time-triggered system, the executor is activated periodically
- When the trigger fires, reads all input data and makes a local copy
- Processes all callbacks in sequential order
- Write output data at the end of the executor's period (Note: this is not implemented yet)
Additionally we have implemented the current rclcpp Executor semantics ("RCLCPP"): - waiting for new data for all handles (rcl_wait) - using trigger condition ANY - if trigger fires, start processing handles in pre-defined sequential order - request from DDS-queue the new data just before the handle is executed (rcl_take)
The selection of the Executor semantics is optional. The default semantics is "RCLCPP".
Multi-threading and scheduling configuration
The rclc Executor has been extended for multi-threading. It supports the assignment of scheduling policies, like priorities or more advanced scheduling algorithms as reservation-based scheduling, to subscription callbacks. [Pull Request, Pre-print SLD2021]. The overall architecture is shown in Figure 15. One Executor thread is responsible for checking for new data from the DDS queue. For every callback, a thread is spawned with the dedicted scheduling policy provided by the operating system. The Executor then dispatches new data of a subscription to it's corresponding callback function, which is then executed in its own thread by operating system.
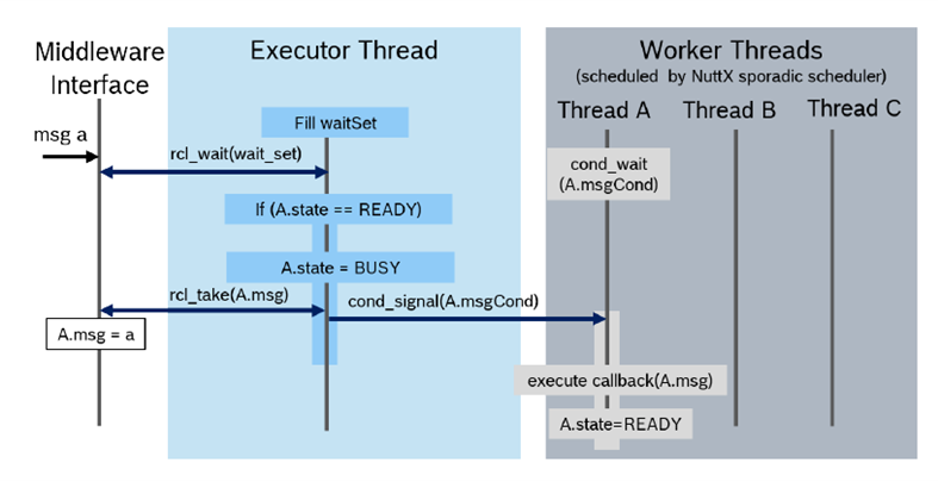
Executor API
The API of the rclc Executor can be divided in two phases: Configuration and Running.
Configuration phase
During the configuration phase, the user shall define: - the total number of callbacks - the sequence of the callbacks - trigger condition (optional, default: ANY) - data communcation semantics (optional, default ROS2)
As the Executor is intended for embedded controllers, dynamic memory management is crucial. Therefore at initialization of the rclc Executor, the user defines the total number of callbacks. The necessary dynamic memory will be allocated only in this phase and no more memory in the running phase. This makes this Executor static in the sense, that during runtime no additional callbacks can be added.
Also in the XRCE-DDS middleware the maximum number of handles need to be configured. See Memory Management Tutorial for the defaults and configuration of the colcon.meta configuration file. To make sure that the changes were applied, you can check the defined values in the following library include file: build/rmw_microxrcedds/include/rmw_microxrcedds_c/config.h.
Then, the user adds handles and the corresponding callbacks (e.g. for subscriptions and timers) to the Executor. The order in which this takes place, defines later the sequential processing order during runtime.
For each handle the user can specify, if the callback shall be executed only if new data is available (ON_NEW_DATA) or if the callback shall always be executed (ALWAYS). The second option is useful when the callback is expected to be called at a fixed rate.
The trigger condition defines when the processing of these callbacks shall start. For convenience some default conditions have been defined:
- trigger_any(default) : start executing if any callback has new data
- trigger_all : start executing if all callbacks have new data
- trigger_one(&data) : start executing if data has been received
- user_defined_function: the user can also define its own function with more complex logic
With 'trigger_any' being the default, the current semantics of the rclcpp Executor is selected.
The data communication semantics can be - ROS2 (default) - LET
To be compatible with ROS2 rclcpp Executor, the existing rclcpp semantics is implemented as 'ROS2'. That is, with the spin-function the DDS-queue is constantly monitored for new data (rcl_wait). If new data becomes available, then is fetched from DDS (rcl_take) immediately before the callback is executed. All callbacks are processed in the user-defined order, this is the only difference to the rclcpp Executor, in which no order can be specified.
Secondly, the LET semantics is implemented such that at the beginning of processing all available data is fetched (rcl_take) and buffered and then the callbacks are processed in the pre-defined operating on the buffered copy.
Running phase
As the main functionality, the Executor has a spin-function which constantly checks for new data at the DDS-queue, like the rclcpp Executor in ROS2. If the trigger condition is satisfied then all available data from the DDS queue is processed according to the specified semantics (ROS or LET) in the user-defined sequential order. After all callbacks have been processed the DDS is checked for new data again.
Available spin functions are
- spin_some - spin one time
- spin_period - spin with a period
- spin - spin indefinitly
Examples
We provide the relevant code snippets how to setup the rclc Executor for the processing patterns as described above.
Sense-plan-act pipeline in robotics example
In this example we want to realise a sense-plan-act pipeline in a single thread. The trigger condition is demonstrated by activating
the sense-phase when both data for the Laser and IMU are available. Three executors are necessary exe_sense, exe_plan and exe_act. The two sensor acquisition callbacks sense_Laser and sense_IMU are registered in the Executor exe_sense.
The trigger condition ALL is responsible to activate the sense-phase only when all data for these two callbacks are available. Finally all three Executors are spinning using a while-loop and the spin_some function.
The definitions of callbacks are omitted.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act;
rcle_let_executor_t exe_sense, exe_plan, exe_act;
// initialize executors
rclc_executor_init(&exe_sense, &context, 2, ...);
rclc_executor_init(&exe_plan, &context, 1, ...);
rclc_executor_init(&exe_act, &context, 1, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb1, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb2, ON_NEW_DATA);
rclc_let_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// executor for plan-phase
rclc_executor_add_subscription(&exe_plan, &plan, &my_sub_cb3, ON_NEW_DATA);
// executor for act-phase
rclc_executor_add_subscription(&exe_act, &act, &my_sub_cb4, ON_NEW_DATA);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_sense);
rclc_executor_spin_some(&exe_plan);
rclc_executor_spin_some(&exe_act);
}
Synchronization of multiple rates example
The sensor fusion synchronizing the multiple rates with a trigger is shown below.
...
rcl_subscription_t aggr_IMU, sense_Laser, sense_IMU;
rcle_let_executor_t exe_aggr, exe_sense;
// initialize executors
rclc_executor_init(&exe_aggr, &context, 1, ...);
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for aggregate IMU data
rclc_executor_add_subscription(&exe_aggr, &aggr_IMU, &my_sub_cb1, ON_NEW_DATA);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb3, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_all, NULL);
// spin all executors
while (true) {
rclc_executor_spin_some(&exe_aggr);
rclc_executor_spin_some(&exe_sense);
}
The setup for the sensor fusion using sequential execution is shown below.
Note that the sequetial order is sense_IMU, which will request the aggregated IMU message, and then sense_Laser
while the trigger will fire, when a laser message is received.
...
rcl_subscription_t sense_Laser, sense_IMU;
rcle_let_executor_t exe_sense;
// initialize executor
rclc_executor_init(&exe_sense, &context, 2, ...);
// executor for sense-phase
rclc_executor_add_subscription(&exe_sense, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe_sense, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_set_trigger(&exe_sense, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe_sense);
High priority processing path example
This example shows the sequential processing order to execute the obstacle avoidance obst_avoid
after the callbacks of the sense-phase and before the callback of the planning phase plan.
The control loop is started when a laser message is received. Then an aggregated IMU message is requested,
like in the example above. Then all the other callbacks are always executed. This assumes that these callbacks
communicate via a global data structure. Race conditions cannot occur, because the callbacks
run all in one thread.
...
rcl_subscription_t sense_Laser, sense_IMU, plan, act, obst_avoid;
rcle_let_executor_t exe;
// initialize executors
rclc_executor_init(&exe, &context, 5, ...);
// define processing order
rclc_executor_add_subscription(&exe, &sense_IMU, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sense_Laser, &my_sub_cb2, ON_NEW_DATA);
rclc_executor_add_subscription(&exe, &obst_avoid, &my_sub_cb3, ALWAYS);
rclc_executor_add_subscription(&exe, &plan, &my_sub_cb4, ALWAYS);
rclc_executor_add_subscription(&exe, &act, &my_sub_cb5, ALWAYS);
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &sense_Laser);
// spin
rclc_executor_spin(&exe);
Real-time embedded applications example
With seqential execution the co-operative scheduling of tasks within a process can be modeled. The trigger condition is used to periodically activate the process which will then execute all callbacks in a pre-defined order. Data will be communicated using the LET-semantics. Every Executor is executed in its own tread, to which an appropriate priority can be assigned.
In the following example, the Executor is setup with 4 handles. We assume a process has three subscriptions sub1, sub2, sub3. The sequential processing order is given by the order as they are added to the Executor. A timer timer defines the period. The trigger_one with the paramter timer is used, so that whenever the timer is ready, all callbacks are processed. Finally the data communication semantics LET is defined.
#include "rcl_executor/let_executor.h"
// define subscription callback
void my_sub_cb1(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb2(const void * msgin)
{
// ...
}
// define subscription callback
void my_sub_cb3(const void * msgin)
{
// ...
}
// define timer callback
void my_timer_cb(rcl_timer_t * timer, int64_t last_call_time)
{
// ...
}
// necessary ROS 2 objects
rcl_context_t context;
rcl_node_t node;
rcl_subscription_t sub1, sub2, sub3;
rcl_timer_t timer;
rcle_let_executor_t exe;
// define ROS context
context = rcl_get_zero_initialized_context();
// initialize ROS node
rcl_node_init(&node, &context,...);
// create subscriptions
rcl_subscription_init(&sub1, &node, ...);
rcl_subscription_init(&sub2, &node, ...);
rcl_subscription_init(&sub3, &node, ...);
// create a timer
rcl_timer_init(&timer, &my_timer_cb, ... );
// initialize executor with four handles
rclc_executor_init(&exe, &context, 4, ...);
// define static execution order of handles
rclc_executor_add_subscription(&exe, &sub1, &my_sub_cb1, ALWAYS);
rclc_executor_add_subscription(&exe, &sub2, &my_sub_cb2, ALWAYS);
rclc_executor_add_subscription(&exe, &sub3, &my_sub_cb3, ALWAYS);
rclc_executor_add_timer(&exe, &timer);
// trigger when handle 'timer' is ready
rclc_executor_set_trigger(&exe, rclc_executor_trigger_one, &timer);
// select LET-semantics
rclc_executor_data_comm_semantics(&exe, LET);
// spin forever
rclc_executor_spin(&exe);
ROS 2 Executor Workshop Reference System
The rclc Executor has been presented at the workshop 'ROS 2 Executor: How to make it efficient, real-time and deterministic?' at ROS World 2021 (i.e. the online version of ROSCon)[S2021]. A Reference System for testing and benchmarking ROS Executors has been developed for this workshop. The application of the rclc Executor on the reference system with the trigger condition can be found in the rclc-executor branch of the Reference System.
The slides can be downloaded here. All information and the videos and slides of the other talks of the workshop can be found at www.apex.ai/roscon-21.
Future work
- Full LET semantics (writing data at the end of the period)
- one publisher that periodically publishes
- if Executors are running in multiple threads, publishing needs to be atomic
- Multi-threaded executor with assignment of scheduling policies of unerlying operating system. [Pull Request, pre-print SLD2021].
Download
The rclc Executor can be downloaded from the ros2/rclc repository. It is available for the ROS 2 versions Foxy, Galactic and Rolling. The repository provides several packages including the rclc Executor and an rclc_examples package with several application examples.
Callback-group-level Executor
The Callback-group-level Executor was an early prototype for a refined rclcpp Executor API developed in micro-ROS. It has been derived from the default rclcpp Executor and addresses some of the aforementioned deficits. Most important, it was used to validate that the underlying layers (rcl, rmw, rmw_adapter, DDS) allow for multiple Executor instances without any negative interferences.
As the default rclcpp Executor works at a node-level granularity – which is a limitation given that a node may issue different callbacks needing different real-time guarantees - we decided to refine the API for more fine-grained control over the scheduling of callbacks on the granularity of callback groups using. We leverage the callback-group concept existing in rclcpp by introducing real-time profiles such as RT-CRITICAL and BEST-EFFORT in the callback-group API (i.e. rclcpp/callback_group.hpp). Each callback needing specific real-time guarantees, when created, may therefore be associated with a dedicated callback group. With this in place, we enhanced the Executor and depending classes (e.g., for memory allocation) to operate at a finer callback-group granularity. This allows a single node to have callbacks with different real-time profiles assigned to different Executor instances - within one process.
Thus, an Executor instance can be dedicated to specific callback group(s) and the Executor’s thread(s) can be prioritized according to the real-time requirements of these groups. For example, all time-critical callbacks are handled by an "RT-CRITICAL" Executor instance running at the highest scheduler priority.
The following Figure illustrates this approach with two nodes served by three Callback-group-level Executors in one process:
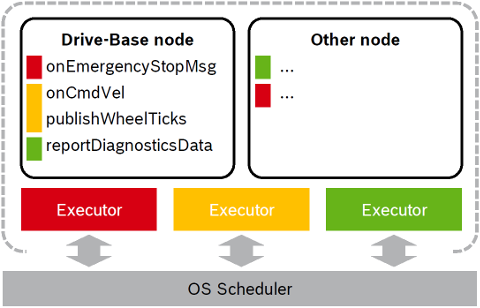
The different callbacks of the Drive-Base node are distributed to different Executors (visualized by the color red, yellow and green). For example the onCmdVel and publishWheelTicks callback are scheduled by the same Executor (yellow). Callbacks from different nodes can be serviced by the same Executor.
API Changes
In this section, we describe the necessary changes to the Executor API: * include/rclcpp/callback_group.hpp:
* Introduced an enum to distinguish up to three real-time classes (requirements) per node (RealTimeCritical, SoftRealTime, BestEffort)
* Changed association with Executor instance from nodes to callback groups.
-
- Added functions to add and remove individual callback groups in addition to whole nodes.
- Replaced private vector of nodes with a map from callback groups to nodes.
-
include/rclcpp/memory_strategy.hpp
- Changed all functions that expect a vector of nodes to the just mentioned map.
-
include/rclcpp/node.hpp and include/rclcpp/node_interfaces/node_base.hpp
- Extended arguments of create_callback_group function for the real-time class.
- Removed the get_associated_with_executor_atomic function.
The callback-group-level executor has been merged into ROS 2 rclcpp in pull request 1218.
Test Bench
As a proof of concept, we implemented a small test bench in the present package cbg-executor_ping-pong_cpp. The test bench comprises a Ping node and a Pong node which exchange real-time and best-effort messages simultaneously with each other. Each class of messages is handled with a dedicated Executor, as illustrated in the following Figure.
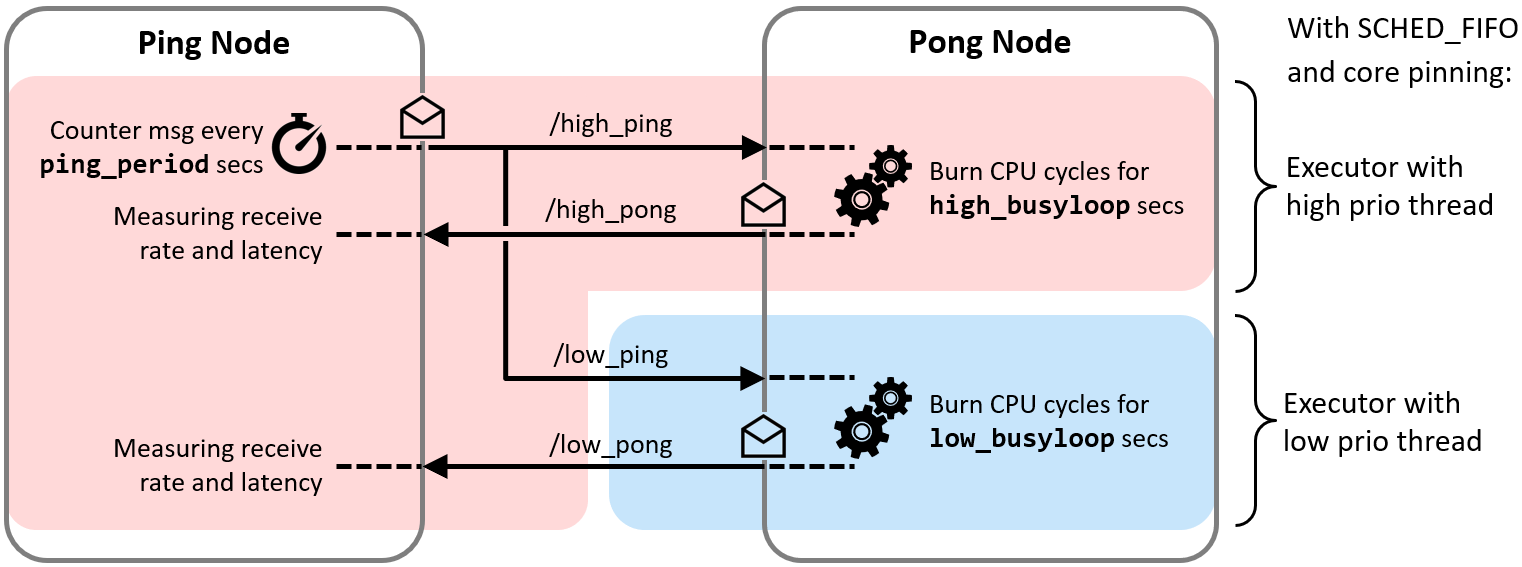
With the test bench, we validated the functioning of the approach.
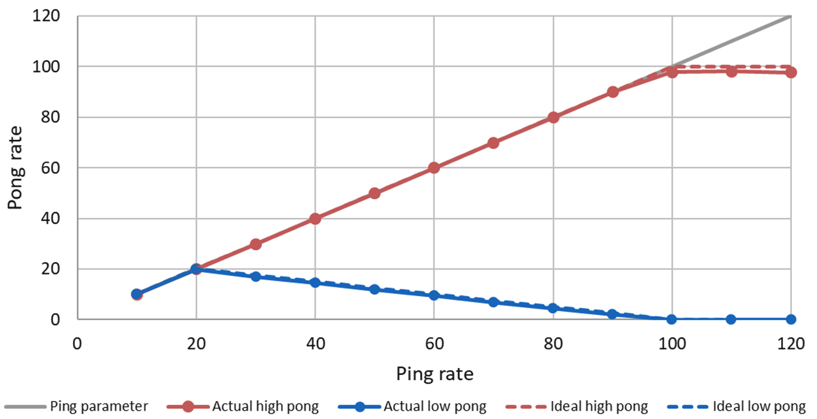
In this example, the callback for the high priority task (red line) consumes 10ms and the low priority task (blue line) 40ms in the Pong Node. With a ping rate of 20 Hz, the CPU saturates (10ms*20+40ms*20=1000ms). With higher frequencies the high priorty task can continue to send its pong message, while the low priority pong task degrades. With a frequency of 100Hz the high priority task requires 100% CPU utilization. With higher ping rates it keeps sending pong messages with 100Hz, while the low priority task does not get any CPU ressources any more and cannot send any messages.
The test bench is provided in the cbg_executor_demo.
Related Work
In this section, we provide an overview to related approaches and link to the corresponding APIs.
Fawkes Framework
Fawkes is a robotic software framework, which supports synchronization points for sense-plan-act like execution. It has been developed by RWTH Aachen since 2006. Source code is available at github.com/fawkesrobotics.
Synchronization
Fawkes provides developers different synchronization points, which are very useful for defining an execution order of a typical sense-plan-act application. These ten synchronization points (wake-up hooks) are the following (cf. libs/aspect/blocked_timing.h):
- WAKEUP_HOOK_PRE_LOOP
- WAKEUP_HOOK_SENSOR_ACQUIRE
- WAKEUP_HOOK_SENSOR_PREPARE
- WAKEUP_HOOK_SENSOR_PROCESS
- WAKEUP_HOOK_WORLDSTATE
- WAKEUP_HOOK_THINK
- WAKEUP_HOOK_SKILL
- WAKEUP_HOOK_ACT
- WAKEUP_HOOK_ACT_EXEC
- WAKEUP_HOOK_POST_LOOP
Configuration at compile time
At compile time, a desired synchronization point is defined as a constructor parameter for a module. For example, assuming that mapLaserGenThread shall be executed in SENSOR_ACQUIRE, the constructor is implemented as:
MapLaserGenThread::MapLaserGenThread()
:: Thread("MapLaserGenThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_ACQUIRE),
TransformAspect(TransformAspect::BOTH_DEFER_PUBLISHER, "Map Laser Odometry")
Similarly, if NaoQiButtonThread shall be executed in the SENSOR_PROCESS hook, the constructor is:
NaoQiButtonThread::NaoQiButtonThread()
:: Thread("NaoQiButtonThread", Thread::OPMODE_WAITFORWAKEUP),
BlockedTimingAspect(BlockedTimingAspect::WAKEUP_HOOK_SENSOR_PROCESS)
Runtime execution
At runtime, the Executor iterates through the list of synchronization points and executes all registered threads until completion. Then, the threads of the next synchronization point are called.
A module (thread) can be configured independent of these sense-plan-act synchronization points. This has the effect, that this thread is executed in parallel to this chain.
The high level overview of the Fawkes framework is shown in the next figure. At compile-time the configuration of the sense-plan act wakeup hook is done (upper part), while at run-time the scheduler iterates through this list of wakeup-hooks (lower part):
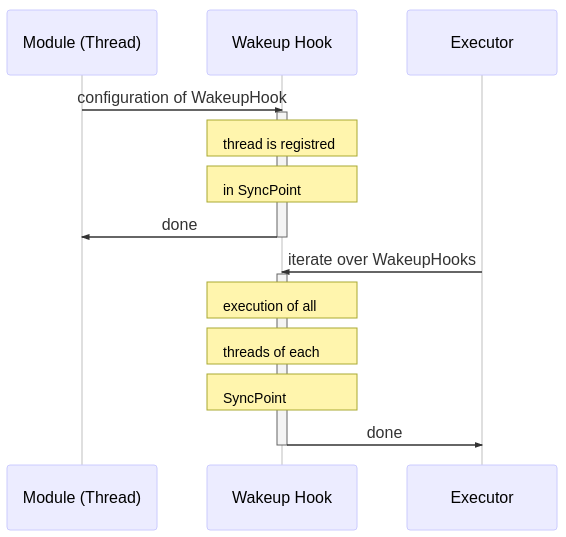
Hence, at run-time, the hooks are executed as a fixed static schedule without preemption. Multiple threads registered in the same hook are executed in parallel.
Orthogonal to the sequential execution of sense-plan-act like applications, it is possible to define further constraints on the execution order by means of a Barrier. A barrier defines a number of threads, which need to have finished before the thread can start, which owns the barrier.
These concepts are implemented by the following main classes:
-
Wakeup hook by
SyncPointandSyncPointManager, which manages a list of synchronization points. -
Executor by the class
FawkesMainThread, which is the scheduler, responsible for calling the user threads. -
ThreadManager, which is derived fromBlockedTimingExecutor, provides the necessary API to add and remove threads to wakeup hooks as well as for sequential execution of the wakeup-hooks. -
Barrieris an object similar tocondition_variablein C++.
Discussion
All threads are executed with the same priority. If multiple sense-plan-act chains shall be executed with different priorities, e.g. to prefer execution of emergency-stop over normal operation, then this framework reaches its limits.
Also, different execution frequencies cannot be modeled by a single instance of this sense-plan-act chain. However, in robotics the fastest sensor will drive the chain and all other hooks are executed with the same frequency.
The option to execute threads independent of the predefined wakeup-hooks is very useful, e.g. for diagnostics. The concept of the Barrier is useful for satisfying functional dependencies which need to be considered in the execution order.
References
[S2021] J. Staschulat, "Micro-ROS: The rclc Executor", in Workshop ROS 2 Executor: How to make it efficient, real-time and deterministic? at ROS World, Oct. 2021, [slides] [Video]
[SLD2021] J. Staschulat, R. Lange and D. N. Dasari, "Budget-based real-time Executor for Micro-ROS", arXiv Pre-Print, May 2021. [paper]
[L2020] Ralph Lange: Advanced Execution Management with ROS 2, ROS-Industrial Conference, Dec 2020 [Slides]
[SLL2020] J. Staschulat, I. Lütkebohle and R. Lange, "The rclc Executor: Domain-specific deterministic scheduling mechanisms for ROS applications on microcontrollers: work-in-progress," 2020 International Conference on Embedded Software (EMSOFT), Singapore, Singapore, 2020, pp. 18-19. [Paper] [Video]
[CB2019] D. Casini, T. Blaß, I. Lütkebohle, B. Brandenburg: Response-Time Analysis of ROS 2 Processing Chains under Reservation-Based Scheduling, in Euromicro-Conference on Real-Time Systems 2019. [Paper] [slides]
[L2018] Ralph Lange: Callback-group-level Executor for ROS 2. Lightning talk at ROSCon 2018. Madrid, Spain. Sep 2018. [Slides] [Video]
[EK2018] R. Ernst, S. Kuntz, S. Quinton, M. Simons: The Logical Execution Time Paradigm: New Perspectives for Multicore Systems, February 25-28 2018 (Dagstuhl Seminar 18092). [Paper]
[NSP2018] A. Naderlinger, S. Resmerita, and W. Pree: LET for Legacy and Model-based Applications, Proceedings of The Logical Execution Time Paradigm: New Perspectives for Multicore Systems (Dagstuhl Seminar 18092), Wadern, Germany, February 2018.
[BP2017] A. Biondi, P. Pazzaglia, A. Balsini, M. D. Natale: Logical Execution Time Implementation and Memory Optimization Issues in AUTOSAR Applications for Multicores, International Worshop on Analysis Tools and Methodologies for Embedded and Real-Time Systems (WATERS2017), Dubrovnik, Croatia.[Paper]
[KZH2015] S. Kramer, D. Ziegenbein, and A. Hamann: Real World Automotive Benchmarks For Free, International Workshop on Analysis Tools and Methodologies for Embedded adn Real-Time Sysems (WATERS), 2015.
[HHK2001] Henzinger T.A., Horowitz B., Kirsch C.M. (2001) Giotto: A Time-Triggered Language for Embedded Programming. In: Henzinger T.A., Kirsch C.M. (eds) Embedded Software. EMSOFT 2001. Lecture Notes in Computer Science, vol 2211. Springer, Berlin, Heidelberg
[LL1973] Liu, C. L.; Layland, J.:Scheduling algorithms for multiprogramming in a hard real-time environment, Journal of the ACM, 20 (1): 46–61, 1973.
Changelog for package rclc
1.1.2 (2023-03-31)
- Added build status of bloom-releases for Humble distribution (backport #291) (#294)
- [rolling] updated ros-tooling versions (backport #289) (#299)
- added documentation (#301) (#304)
- Drop build dependency on std_msgs (backport #314) (#317)
- Updated ros-tooling versions (backport #318) (#319)
- removed build status for Galactic distribution in README (backport #321) (#323)
- Update documentation about number_of_handles (#326) (#328)
1.1.1 (2022-03-16)
- Fix enum naming for avoid collision (backport #242) (#243)
- Backport parameters (#263)
1.1.0 (2022-01-25)
- Update codecov to ignore rclc_examples and all test folders (backport #145) (#150)
- Updated table of bloom releases (removed dashing, inserted galactic) (backport #147) (#152)
- Refactor #116 remove callback_type (#154)
- Fix codecov to ignore unit tests and rclc_examples package (backport #155) (#162)
- Feature request: check for valid ros context in spin_some (#165) (#167)
- Ignoring unsuccessful SERVICE_TAKE (#175) (#177)
- Backport windows port of PR #144 (#182)
- Fix: printf in executor spin (#195) (#197)
- Fix init options handling (#202) (#204)
- [backport galactic, foxy] data_available optimization (backport #212) (#213)
- Fix data_available reset for timer (#215)
- Executor ignore canceled timers (#220) (#222)
- Resolved error in unit test see issue #230 (#231) (#233)
- Updated documentation README.md (#234)
1.0.2 (2021-07-17)
- Bumped version (tag with version 1.0.1 already exists)
1.0.1 (2021-07-17)
- Added quality of service entity creation API
- Added executor prepare API
- Added support to add subscription with context to executor
- Added support for removing subscription from executor
- Updated compatability function for sleep
- Added quality declaration statement
- Used executor allocator in spin
1.0.0 (2021-03-04)
- Service callbacks with context
- Fixed minor issues unit tests
- Upgraded setup_ros action (ci jobs)
- Removed Eloquent from ci jobs
0.1.7 (2021-01-20)
- Corrected corrupted changelog
0.1.6 (2021-01-20)
- Fixed issues due to Github Action timing delays on cloud build
- Fixed missing package dependency in Github Action for Eloquent
0.1.5 (2020-12-11)
- Added support for services,clients and guard_conditions to rclc executor
- Added table for bloom release status in README file
0.1.4 (2020-11-25)
- Fixed error in bloom release
0.1.3 (2020-11-23)
- Added rclc_lifecycle package
- Change maintainer information
- Minor fixes, updated unit tests
0.1.2 (2020-05-19)
- Fixed compiler errors for bloom release
0.1.1 (2020-05-14)
- Initial release