
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
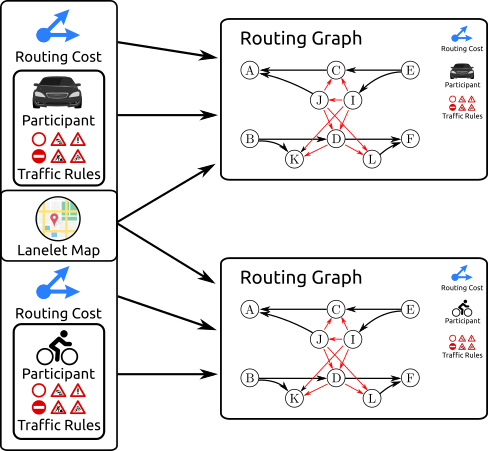
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
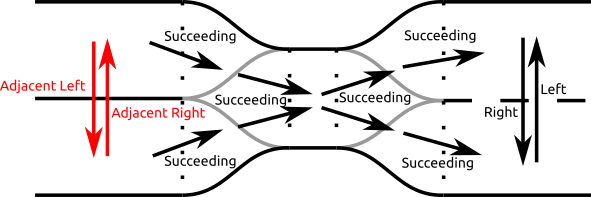
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
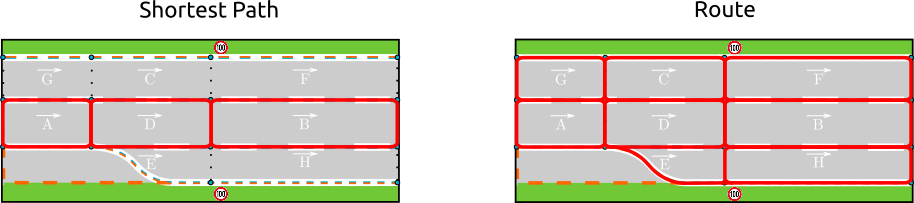
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged lanelet2_routing at Robotics Stack Exchange
|
|
lanelet2_routing package from lanelet2 repolanelet2 lanelet2_core lanelet2_examples lanelet2_io lanelet2_maps lanelet2_matching lanelet2_projection lanelet2_python lanelet2_routing lanelet2_traffic_rules lanelet2_validation |
ROS Distro
|
Package Summary
| Version | 1.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/fzi-forschungszentrum-informatik/lanelet2.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-02-05 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Fabian Immel
Authors
- Matthias Mayr
Lanelet2 routing
The routing module for lanelet2.
For a short version of this you can also look at the presentation. If some images do not render correctly, please clone the repository and open the html file in your browser.
This readme covers some basics. The API offers more than that.
1. Components and Vocabulary
How to create a Routing Graph
The needed components to create a routing graph are:
Routing Cost Modules:
- They generically determine the routing cost for travelling along a lanelet/area
- Can be e.g. length, travel time
- You can dynamically select between them when querying the routing graph
- You can easily plug in your own routing cost calculation
- Influences the prefered path
Traffic Rules for a Specific Participant (see lanelet2_traffic_rules)
- Determines which lanelets/areas are passable
- Influences the possible paths
Lanelet Map: (see lanelet2_core)
- Map with Lanelets, Areas, Regulatory Elements, …
Relations
Lanelets that are part of a routing graph can have relations to each other:
The possible relations are:
* left, right (reachable via lane change)
* adjacent left, adjacent right (lanelets that are neighbours but not reachable via lane change)
* succeeding (relation between two subsequent lanelets)
* conflicting (intersecting lanelets/areas)
* area (reachable area to lanelet/area relation)
Route vs Path vs Sequence
When querying data in the routing graph, you will come across the terms route, path and sequence. In contrast to a simple set of lanelets (data-wise a vector of lanelets), they have a special meaning and are data-wise different classes.
A route means all the lanelets that can be used to a destination without driving a different road. They can be connected by a generic sequence of lane changes and successors.
A path (LaneletPath or LaneletOrAreaPath) is an ordered list of Lanelets/Areas that lead to the destination. They can be connected by lane changes.
A sequence (LaneletSequence) is a sequence of subsequent Lanelets that is not separated by a lane change (think of it as a lane). It does not necessary lead to a destination, instead it ends when a lane change is required. In the example image, the lanelets A, D, B form a valid sequence (and also a valid path), while the lanelets A, D, E are a valid path, but not a valid sequence.
2. Code Usage
Create a Routing Graph
using namespace lanelet;
// Load a map
LaneletMapPtr map = load("map.osm", Origin({49, 8})); // origin has to be close to the map data in lat/lon coordinates
// Initialize traffic rules
TrafficRulesPtr trafficRules{TrafficRulesFactory::instance().create(Locations::Germany, Participants::Vehicle)};
// Optional: Initalize routing costs
double laneChangeCost = 2;
RoutingCostPtrs costPtrs{std::make_shared<RoutingCostDistance>(laneChangeCost)};
// Optional: Initialize config for routing graph:
RoutingGraph::Configuration routingGraphConf;
routingGraphConf.emplace(std::make_pair(RoutingGraph::ParticipantHeight, Attribute("2.")));
// Create routing graph
RoutingGraphPtr graph = RoutingGraph::build(map, trafficRules /*, costPtrs, routingGraphConf*/);
- The traffic rules object represents the view from which the map will be interpreted. Doing routing with vehicle traffic rules will yield different results than routing with e.g. bicycle traffic rules.
- Routing for bicycles might include lanelets that are not available to (motorized)vehicles and vice versa.
The python interface works similarly:
import lanelet2
map = lanelet2.io.load("map.osm", lanelet2.io.Origin(49, 8))
trafficRules = lanelet2.traffic_rules.create(lanelet2.traffic_rules.Locations.Germany, lanelet2.traffic_rules.Participants.Vehicle)
graph = lanelet2.routing.RoutingGraph(map, trafficRules)
Get a shortest path
Optional<routing::LaneletPath> shortestPath = graph->shortestPath(fromLanelet, toLanelet);
-
Optionalwill be uninitialized (false) if there’s no path - there’s also
shortestPathWithVia
in python:
shortestPath = graph.shortestPath(fromLanelet, toLanelet)
In python, shortestPath simply returns None if there is no path.
Get and write a route
File truncated at 100 lines see the full file
Changelog for package lanelet2_routing
1.2.2 (2024-10-25)
- Prevent unintended modification of graph in lanelet::routing::Route (#352)
- Build documentation with mkdocs (#321)
- Contributors: DavUhll, poggenhans
1.2.1 (2023-05-10)
- Update thirdparty deps, rework projected point, enable python 3.10/3.11 (#300)
- Contributors: poggenhans
1.2.0 (2023-01-30)
- Add CI using GitHub Actions (#256)
- Use TYPED_TEST_SUITE over deprecated TYPED_TEST_CASE in unit tests
- Add missing include for boost 1.69
- Contributors: Fabian Poggenhans, Fabian Immel
1.1.1 (2020-09-14)
1.1.0 (2020-09-06)
- Implement more flexible configuration for obtaining possible paths. Still lacking proper tests
- Add parameter to left/right/adjacentLeft/adjacentRight so that they can be queried based on routing cost id
- Fix routing for lane changes, add tests for it
- Fix wrong route in circles
- Fix unittests that rely on a non-writable root directory
- Add experimental support for building with colcon on ros2 and ament_cmake
- Fix the documentation about how to create a routing graph
- Removing extra semicolons causing warnings with wpedantic.
- Making all includes in lanelet2_routing consistent.
- Updating package.xml files to format 3.
- Fix use of equals in older boost versions
- Arbitrary lanelet and area adjacencies in LaneletPaths
- Add functionality to create the bounding polygon from a Path
- Contributors: Fabian Poggenhans, Johannes Janosovits, Joshua Whitley
1.0.1 (2020-03-24)
- Mention laneletSubmap in README
- Make sure lanelet2 buildtool_export_depends on mrt_cmake_modules
- Add changelogs
- Fix clang-tidy warnings
- Contributors: Fabian Poggenhans
1.0.0 (2020-03-03)
- Bump version to 1.0
- Routing: Add shortest path search based on areas
- Fix default values for lane changes in RoutingGraph
- RoutingGraph and Route now use the new LaneletSubmap to store the lanelets they are using their member functions laneletMap() and passableMap() are now deprecated and should be replaced by laneletSubmap() and passableSubmap() respectively. These functions have less overhead and are less likely to be misinterpreted as 'maps containing only the lanelets you need'
- Edges with nonfinite costs are no longer added to the graph to avoid overflows. If a cost function returns infinite costs, no edge will be added and the connection will not be available to the routing graph
- Introduce proper namespacing for internal objects
- Update documentation
- Routing graph and route object now support queries with a custom search function Routing graph and route object now both have a function forEachSuccessor (and more) for doing more advanced queries. Added doc tests and python bindings
- Update the shortest path algorithm to use the new dijktra search
- Extended and simplified the reachablePath/Set functions by using boost graphs implementation of dijkstras shortest paths
- Refactored the internal representation of the route. Cleaned up headers that are only supposed to be used internally
- Complete rewrite of the route builder using boost graph
- Removed the "diverging" and "merging" classification from the routing graph and update the doc They are now all represented with the "succeeding" relation. Information about merging or diverging can now be obtained simply by querying the number of following/preceding lanelets. As a consequence, the route object no longer caches queried "lanes". The responsible functions are now const.
- Fix compiler errors with gcc 5
- Fix image paths in routing doc
- Initial commit
- Contributors: Fabian Poggenhans, Johannes Janosovits, Maximilian Naumann