
|
crane_plus_description package from crane_plus repocrane_plus crane_plus_control crane_plus_description crane_plus_examples crane_plus_gazebo crane_plus_moveit_config |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.0.1 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/crane_plus.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2023-09-08 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Shota Aoki
- Atsushi Kuwagata
crane_plus_description
このパッケージはCRANE+ V2のモデルデータ(xacro)を所持しています。
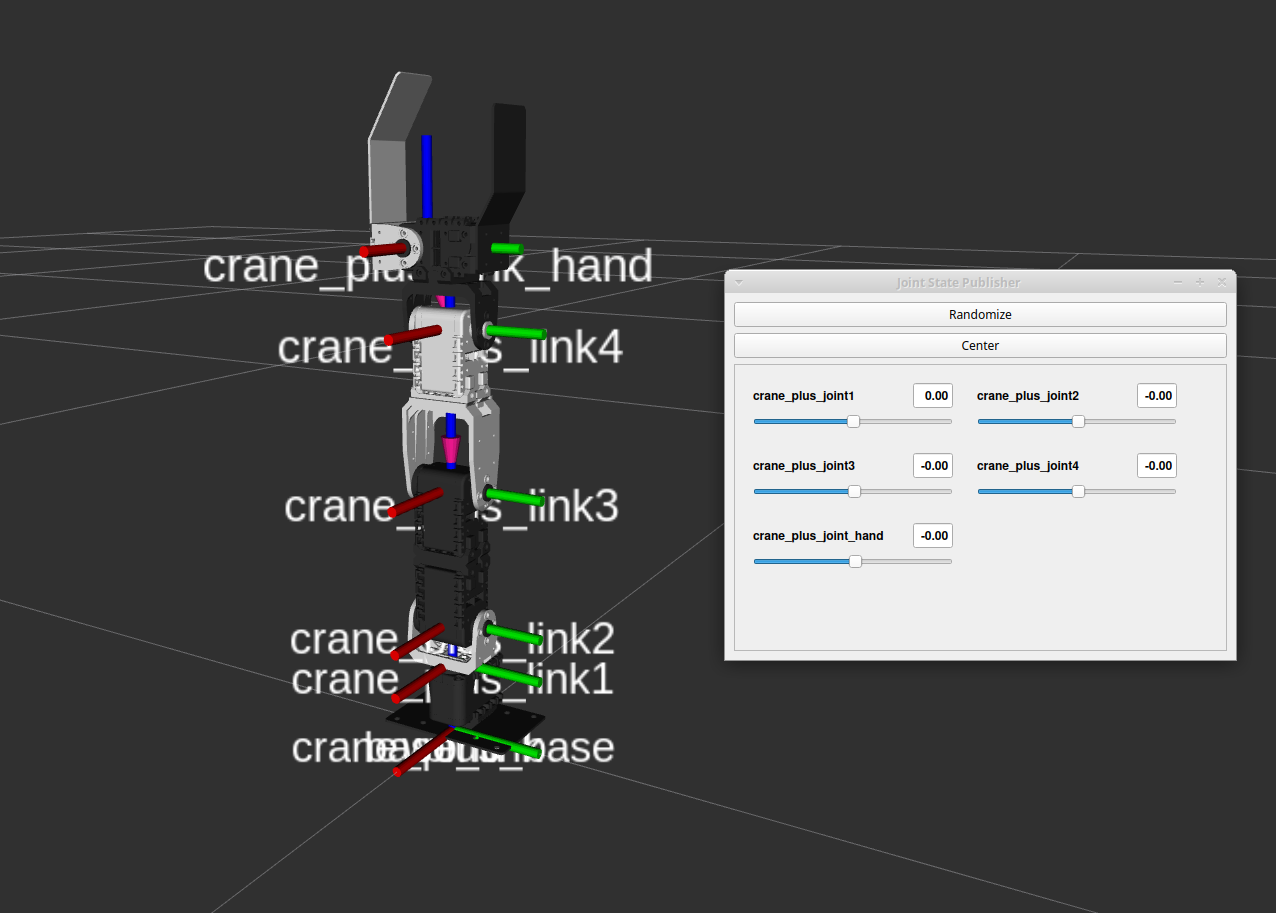
display robot model
下記のコマンドを実行して、robot_state_publisher、joint_state_publisher、rviz2を起動します。
CRANE+ V2のモデルが表示されるので、xacroファイルのデバッグに役立ちます。
$ ros2 launch crane_plus_description display.launch.py
Webカメラ搭載モデルの場合は、下記のコマンドを実行してください。
$ ros2 launch crane_plus_description display.launch.py use_camera:=true
configure servo angle limits
CRANE+ V2の実機を動かす場合は、
事前にサーボモータ内部の角度リミット(CW Angle Limit、CCW Angle Limit)を設定してください。
CRANE+ V2に搭載されているサーボモータはROBOTISのAX-12Aのため、 Dynamixel Wizard 2 を使用して角度リミットを設定できます。
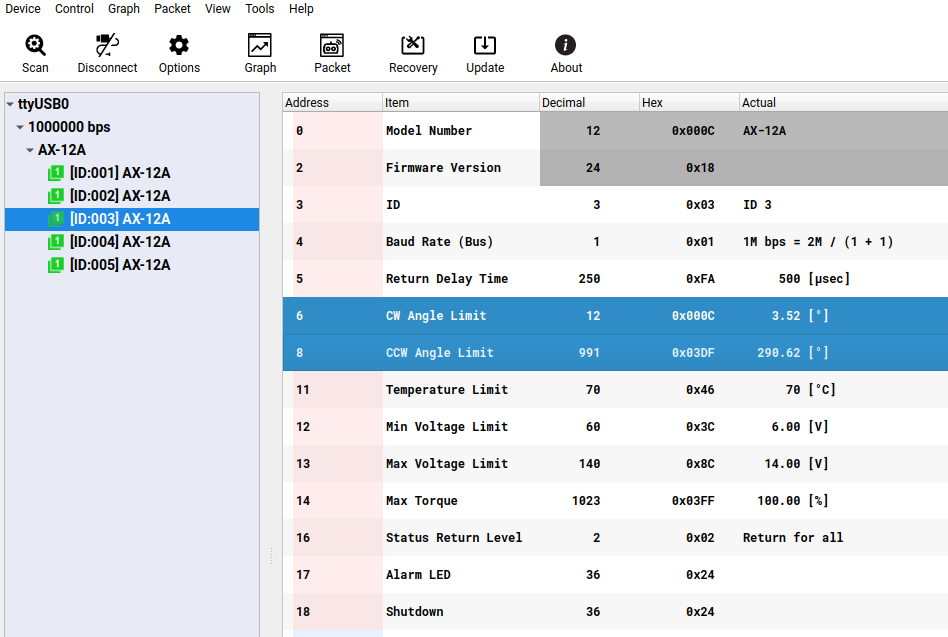
crane_plus.urdf.xacroには、 下記のように各関節の角度リミットが定義されています。 この角度リミットに近い値をサーボモータに設定することを推奨します。
<xacro:property name="M_PI" value="3.14159"/>
<xacro:property name="TO_RADIAN" value="${M_PI / 180.0}"/>
<xacro:property name="SERVO_HOME" value="${TO_RADIAN * 150.0}"/>
<xacro:property name="JOINT_VELOCITY_LIMIT" value="2.0"/>
<xacro:property name="JOINT_1_LOWER_LIMIT" value="${0.0 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_1_UPPER_LIMIT" value="${300.0 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_2_LOWER_LIMIT" value="${45.45 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_2_UPPER_LIMIT" value="${252.20 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_3_LOWER_LIMIT" value="${3.52 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_3_UPPER_LIMIT" value="${290.62 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_4_LOWER_LIMIT" value="${44.57 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_4_UPPER_LIMIT" value="${251.32 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_HAND_LOWER_LIMIT" value="${109.38 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_HAND_UPPER_LIMIT" value="${188.27 * TO_RADIAN - SERVO_HOME}"/>
Changelog for package crane_plus_description
2.0.1 (2023-09-08)
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged crane_plus_description at Robotics Stack Exchange
|
|
crane_plus_description package from crane_plus repocrane_plus crane_plus_control crane_plus_description crane_plus_examples crane_plus_gazebo crane_plus_ignition crane_plus_moveit_config |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.2.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rt-net/crane_plus.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2023-08-08 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- RT Corporation
Authors
- Shota Aoki
- Atsushi Kuwagata
crane_plus_description
このパッケージはCRANE+ V2のモデルデータ(xacro)を所持しています。
display robot model
下記のコマンドを実行して、robot_state_publisher、joint_state_publisher、rviz2を起動します。
CRANE+ V2のモデルが表示されるので、xacroファイルのデバッグに役立ちます。
$ ros2 launch crane_plus_description display.launch.py
Webカメラ搭載モデルの場合は、下記のコマンドを実行してください。
$ ros2 launch crane_plus_description display.launch.py use_camera:=true
configure servo angle limits
CRANE+ V2の実機を動かす場合は、
事前にサーボモータ内部の角度リミット(CW Angle Limit、CCW Angle Limit)を設定してください。
CRANE+ V2に搭載されているサーボモータはROBOTISのAX-12Aのため、 Dynamixel Wizard 2 を使用して角度リミットを設定できます。
crane_plus.urdf.xacroには、 下記のように各関節の角度リミットが定義されています。 この角度リミットに近い値をサーボモータに設定することを推奨します。
<xacro:property name="M_PI" value="3.14159"/>
<xacro:property name="TO_RADIAN" value="${M_PI / 180.0}"/>
<xacro:property name="SERVO_HOME" value="${TO_RADIAN * 150.0}"/>
<xacro:property name="JOINT_VELOCITY_LIMIT" value="2.0"/>
<xacro:property name="JOINT_1_LOWER_LIMIT" value="${0.0 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_1_UPPER_LIMIT" value="${300.0 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_2_LOWER_LIMIT" value="${45.45 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_2_UPPER_LIMIT" value="${252.20 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_3_LOWER_LIMIT" value="${3.52 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_3_UPPER_LIMIT" value="${290.62 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_4_LOWER_LIMIT" value="${44.57 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_4_UPPER_LIMIT" value="${251.32 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_HAND_LOWER_LIMIT" value="${109.38 * TO_RADIAN - SERVO_HOME}"/>
<xacro:property name="JOINT_HAND_UPPER_LIMIT" value="${188.27 * TO_RADIAN - SERVO_HOME}"/>
Changelog for package crane_plus_description
1.1.0 (2022-08-16)
- Update author tags (#49)
- effort limit