
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
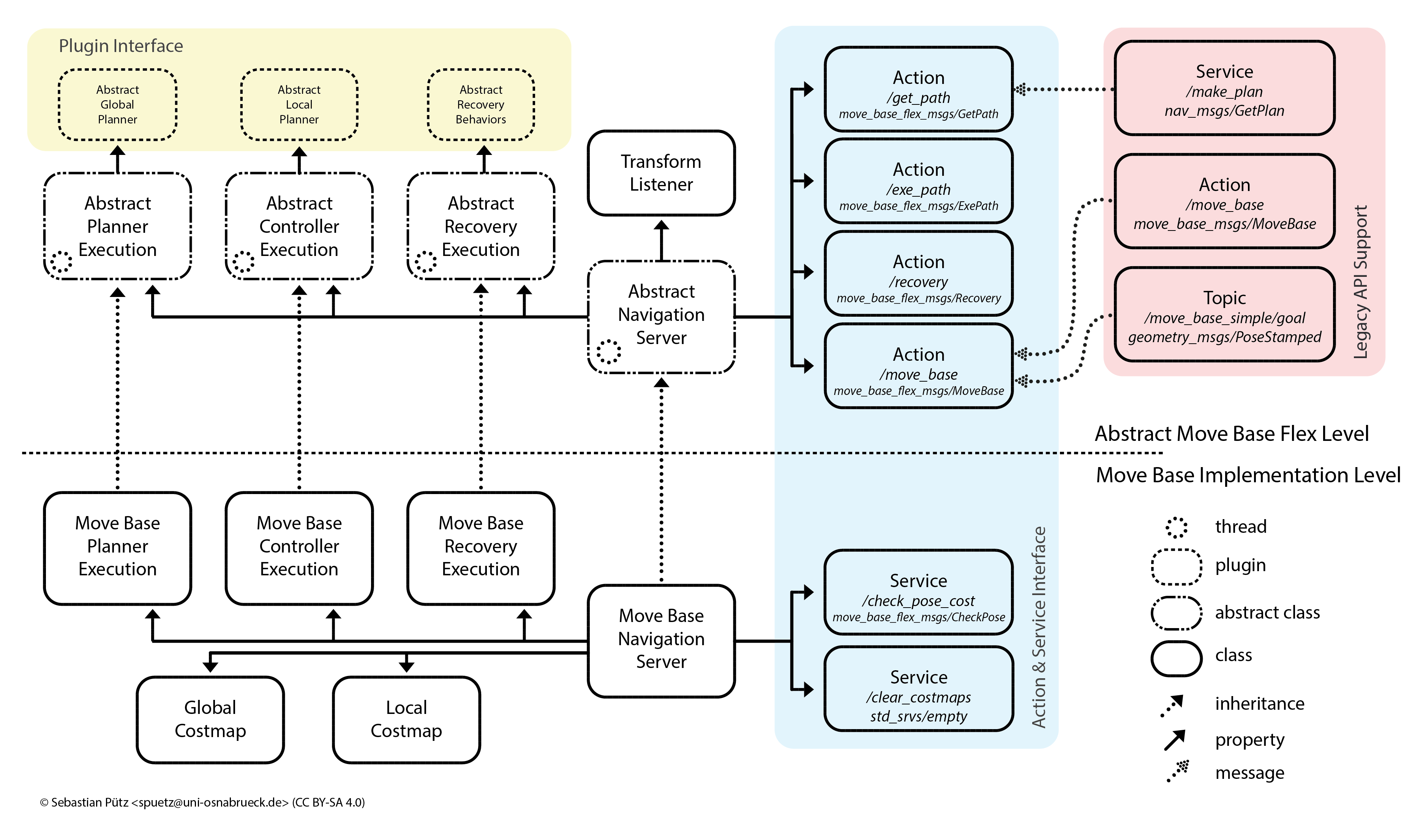
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
 Magazino
Magazino
Move Base Flex was initially developed at Magazino.
 Nature Robots
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | lunar |
| Last Updated | 2019-10-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 0.2.5 |
| mbf_abstract_nav | 0.2.5 |
| mbf_costmap_core | 0.2.5 |
| mbf_costmap_nav | 0.2.5 |
| mbf_msgs | 0.2.5 |
| mbf_simple_nav | 0.2.5 |
| mbf_utility | 0.2.5 |
| move_base_flex | 0.2.5 |
README
Move Base Flex: A Highly Flexible Navigation Framework:
This repository contains Move Base Flex (MBF), a backwards-compatible replacement for move_base. MBF can use existing plugins for move_base, and provides an enhanced version of the same ROS interface. It exposes action servers for planning, controlling and recovering, providing detailed information of the current state and the plugin’s feedback. An external executive logic can use MBF and its actions to perform smart and flexible navigation strategies. For example, at Magazino we have successfully deployed MBF at customer facilities to control TORU robots in highly dynamical environments. Furthermore, MBF enables the use of other map representations, e.g. meshes. The core features are:
- Fully backwards-compatible with current ROS navigation.
- Actions for the submodules planning, controlling and recovering, and services to query the costmaps are provided. This interface allows external executives, e.g. SMACH, or Behavior Trees, to run highly flexible and complex navigation strategies.
- Comprehensive result and feedback information on all actions, including error codes and messages from the loaded plugins. For users still relying on a unique navigation interface, we have extended move_base action with detailed result and feedback information (though we still provide the current one).
- Separation between an abstract navigation framework and concrete implementations, allowing faster development of new applications, e.g. 3D navigation.
- Load multiple planners and controllers, selectable at runtime by setting one of the loaded plugin names in the action goal.
- Concurrency: Parallel planning, recovering, controlling by selecting different concurrency slots when defining the action goal. Only different plugins instances can run in parallel.
Please see also the Move Base Flex Documentation and Tutorials in the ROS wiki.
Concepts & Architecture
We have created Move Base Flex for a larger target group besides the standard developers and users of move_base and 2D navigation based on costmaps, as well as addressed move_base’s limitations. Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a richer and more expressive interface without breaking the current move_base plugin API. The new abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, MoveBase is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
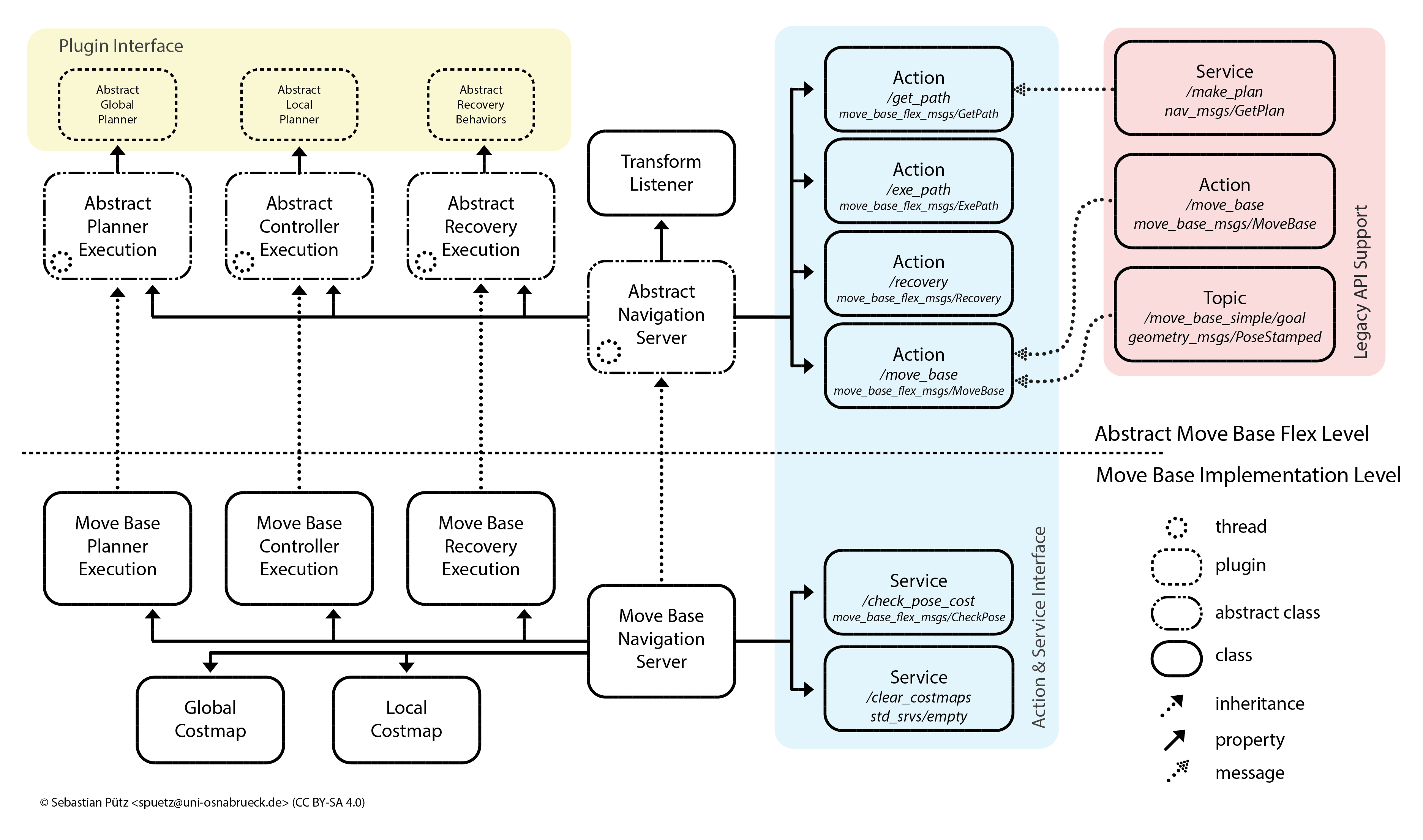
Future Work
MBF is an ongoing project; some of the improvements we we have planned for the near future are:
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Add pause/resume interface for the controller, for example to recover from a bumper, or an emergency stop button hit
- Constraints-based goal (see issue #8)
But of course your are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Build Status
| Master | Indigo | Kinetic | Lunar | Melodic | |
|---|---|---|---|---|---|
| Travis |  |
 |
 |
 |
 |
| Binary Deb | |||||
| Source Deb | |||||
| Develop | |||||
| Documentation |
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_msgs mbf_simple_core mbf_simple_nav mbf_test_utility mbf_utility move_base_flex rviz_mbf_plugins |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/naturerobots/move_base_flex.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2026-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 1.0.5 |
| mbf_abstract_nav | 1.0.5 |
| mbf_msgs | 1.0.5 |
| mbf_simple_core | 1.0.5 |
| mbf_simple_nav | 1.0.5 |
| mbf_test_utility | 1.0.5 |
| mbf_utility | 1.0.5 |
| move_base_flex | 1.0.5 |
| rviz_mbf_plugins | 1.0.5 |
README
![]()
![]()
Move Base Flex: A Highly Flexible Navigation Framework
Move Base Flex (MBF) is a modular and map-agnostic navigation framework for ROS that provides well-defined interfaces and action servers for path planning, control, and recovery behaviors. Rather than being a complete navigation stack, MBF serves as an adaptable interface layer that enables developers to design and integrate their own navigation systems using arbitrary map representations and custom plugin implementations. Key features are:
-
Map-Agnostic Interface Design
MBF’s interfaces are independent of any particular map representation (e.g., 2D costmaps, meshes, or voxel grids), enabling seamless integration, scientific comparison, and context-aware selection of both navigation implementations and map types.
-
Modular Action-Based Architecture
Separate action servers for path planning, control, and recovery enable external deliberation software (e.g., Behavior Trees, SMACH, or custom logic) to coordinate complex navigation strategies.
-
Extensible Plugin Framework
Multiple planners, controllers, and recovery behaviors can be loaded simultaneously, selected at runtime, or executed in parallel using different concurrency slots.
-
Rich Feedback and Diagnostics
All actions expose detailed feedback, results, and error codes, providing transparent runtime information for better debugging and system supervision.
-
Clear Separation of Interfaces and Implementations
MBF’s design facilitates reuse, experimentation, and the rapid development of new navigation approaches independent of any particular mapping or planning framework.
Concepts & Architecture
Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a rich and expressive interface. The abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, SimpleNav (or MeshNav) is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
History
MBF was originally developed for ROS 1 by Magazino (see noetic or master branch) as a backwards-compatible replacement for move_base, providing a more flexible and transparent architecture when no modular alternative was available.
It has been successfully deployed in production environments, for example at Magazino, to control TORU robots operating in dynamic warehouse scenarios.
Compared to move_base, MBF introduced:
- Separate action servers for path planning, control, and recovery
- Detailed feedback and error reporting
- Runtime selection of multiple plugin implementations
- Map-agnostic interface definitions
With the advent of ROS 2 and newer navigation frameworks such as Nav2, MBF continues to serve as a lightweight, interface-oriented foundation for research, prototyping, and customized navigation systems.
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/naturerobots/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Credit
Magazino
Move Base Flex was initially developed at Magazino.
Nature Robots
The latest version (ROS2) is developed and maintained by Nature Robots.
Further Resources
-
Provides 3D navigation on mesh surfaces, implementing the MBF interfaces provided by this repository.
-
Provides 2D navigation on 2D costmaps by translating actions to nav2.
-
Demonstrates how to invoke MBF actions using popular deliberation frameworks such as BehaviorTree.CPP and SMACH. These examples work independently of the chosen map representation.
Announcements & News
16.10.2024 First ROS2 Version of Move Base Flex
The first working ROS2 version of Move Base Flex has been published.
It targets the ROS2 distro humble and includes most components you know from ROS1:
- mbf_abstract_core & mbf_abstract_nav
- mbf_simple_core & mbf_simple_nav (for navigation components that need no map representation)
- mbf_utility
- mbf_msgs
The ROS2 version comes with an additional package that helps with integration tests:
- mbf_test_utility (only a test dependency)
These two packages not migrated:
- mbf_costmap_core & mbf_costmap_nav (for navigation components that utilize a 2D costmap). Nav2, which hosts the 2D costmap equivalent to the one from ROS1, and ROS1’s move_base are quite different, so interfaces do not easily fit anymore. This makes migration hard. PRs are welcome for this. However, we might integrate another 2D grid map planning module soon.
Note that mesh_navigation is also available for ROS2, now. It provides navigation components that utilize 3D mesh maps.
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | kinetic |
| Last Updated | 2020-12-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 0.3.4 |
| mbf_abstract_nav | 0.3.4 |
| mbf_costmap_core | 0.3.4 |
| mbf_costmap_nav | 0.3.4 |
| mbf_msgs | 0.3.4 |
| mbf_simple_nav | 0.3.4 |
| mbf_utility | 0.3.4 |
| move_base_flex | 0.3.4 |
README
Move Base Flex: A Highly Flexible Navigation Framework:
This repository contains Move Base Flex (MBF), a backwards-compatible replacement for move_base. MBF can use existing plugins for move_base, and provides an enhanced version of the same ROS interface. It exposes action servers for planning, controlling and recovering, providing detailed information of the current state and the plugin’s feedback. An external executive logic can use MBF and its actions to perform smart and flexible navigation strategies. For example, at Magazino we have successfully deployed MBF at customer facilities to control TORU robots in highly dynamical environments. Furthermore, MBF enables the use of other map representations, e.g. meshes. The core features are:
- Fully backwards-compatible with current ROS navigation.
- Actions for the submodules planning, controlling and recovering, and services to query the costmaps are provided. This interface allows external executives, e.g. SMACH, or Behavior Trees, to run highly flexible and complex navigation strategies.
- Comprehensive result and feedback information on all actions, including error codes and messages from the loaded plugins. For users still relying on a unique navigation interface, we have extended move_base action with detailed result and feedback information (though we still provide the current one).
- Separation between an abstract navigation framework and concrete implementations, allowing faster development of new applications, e.g. 3D navigation.
- Load multiple planners and controllers, selectable at runtime by setting one of the loaded plugin names in the action goal.
- Concurrency: Parallel planning, recovering, controlling by selecting different concurrency slots when defining the action goal. Only different plugins instances can run in parallel.
Please see also the Move Base Flex Documentation and Tutorials in the ROS wiki. And this repository contains a working minimal configuration for a turtlebot 3.
Concepts & Architecture
We have created Move Base Flex for a larger target group besides the standard developers and users of move_base and 2D navigation based on costmaps, as well as addressed move_base’s limitations. Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a richer and more expressive interface without breaking the current move_base plugin API. The new abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, MoveBase is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
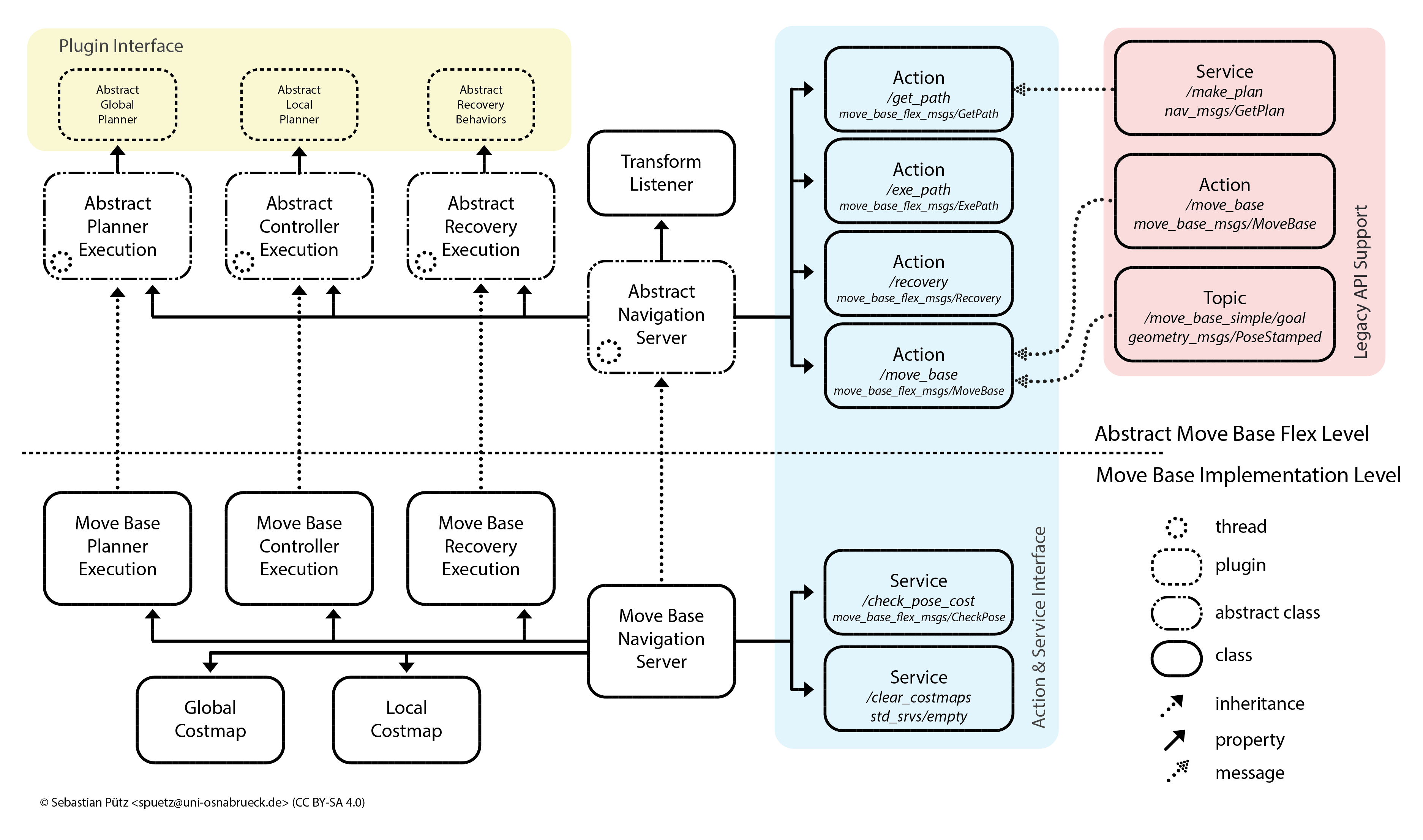
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/magazino/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Build Status
| Master | Kinetic | Lunar | Melodic | Noetic | |
|---|---|---|---|---|---|
| Travis | |
|
|
|
 |
| Binary Deb | |||||
| Source Deb | |||||
| Develop | |||||
| Documentation |
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | melodic |
| Last Updated | 2021-10-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 0.4.0 |
| mbf_abstract_nav | 0.4.0 |
| mbf_costmap_core | 0.4.0 |
| mbf_costmap_nav | 0.4.0 |
| mbf_msgs | 0.4.0 |
| mbf_simple_nav | 0.4.0 |
| mbf_utility | 0.4.0 |
| move_base_flex | 0.4.0 |
README
Move Base Flex: A Highly Flexible Navigation Framework:
This repository contains Move Base Flex (MBF), a backwards-compatible replacement for move_base. MBF can use existing plugins for move_base, and provides an enhanced version of the same ROS interface. It exposes action servers for planning, controlling and recovering, providing detailed information of the current state and the plugin’s feedback. An external executive logic can use MBF and its actions to perform smart and flexible navigation strategies. For example, at Magazino we have successfully deployed MBF at customer facilities to control TORU robots in highly dynamical environments. Furthermore, MBF enables the use of other map representations, e.g. meshes. The core features are:
- Fully backwards-compatible with current ROS navigation.
- Actions for the submodules planning, controlling and recovering, and services to query the costmaps are provided. This interface allows external executives, e.g. SMACH, or Behavior Trees, to run highly flexible and complex navigation strategies.
- Comprehensive result and feedback information on all actions, including error codes and messages from the loaded plugins. For users still relying on a unique navigation interface, we have extended move_base action with detailed result and feedback information (though we still provide the current one).
- Separation between an abstract navigation framework and concrete implementations, allowing faster development of new applications, e.g. 3D navigation.
- Load multiple planners and controllers, selectable at runtime by setting one of the loaded plugin names in the action goal.
- Concurrency: Parallel planning, recovering, controlling by selecting different concurrency slots when defining the action goal. Only different plugins instances can run in parallel.
Please see also the Move Base Flex Documentation and Tutorials in the ROS wiki. And this repository contains a working minimal configuration for a turtlebot 3.
Concepts & Architecture
We have created Move Base Flex for a larger target group besides the standard developers and users of move_base and 2D navigation based on costmaps, as well as addressed move_base’s limitations. Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a richer and more expressive interface without breaking the current move_base plugin API. The new abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, MoveBase is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
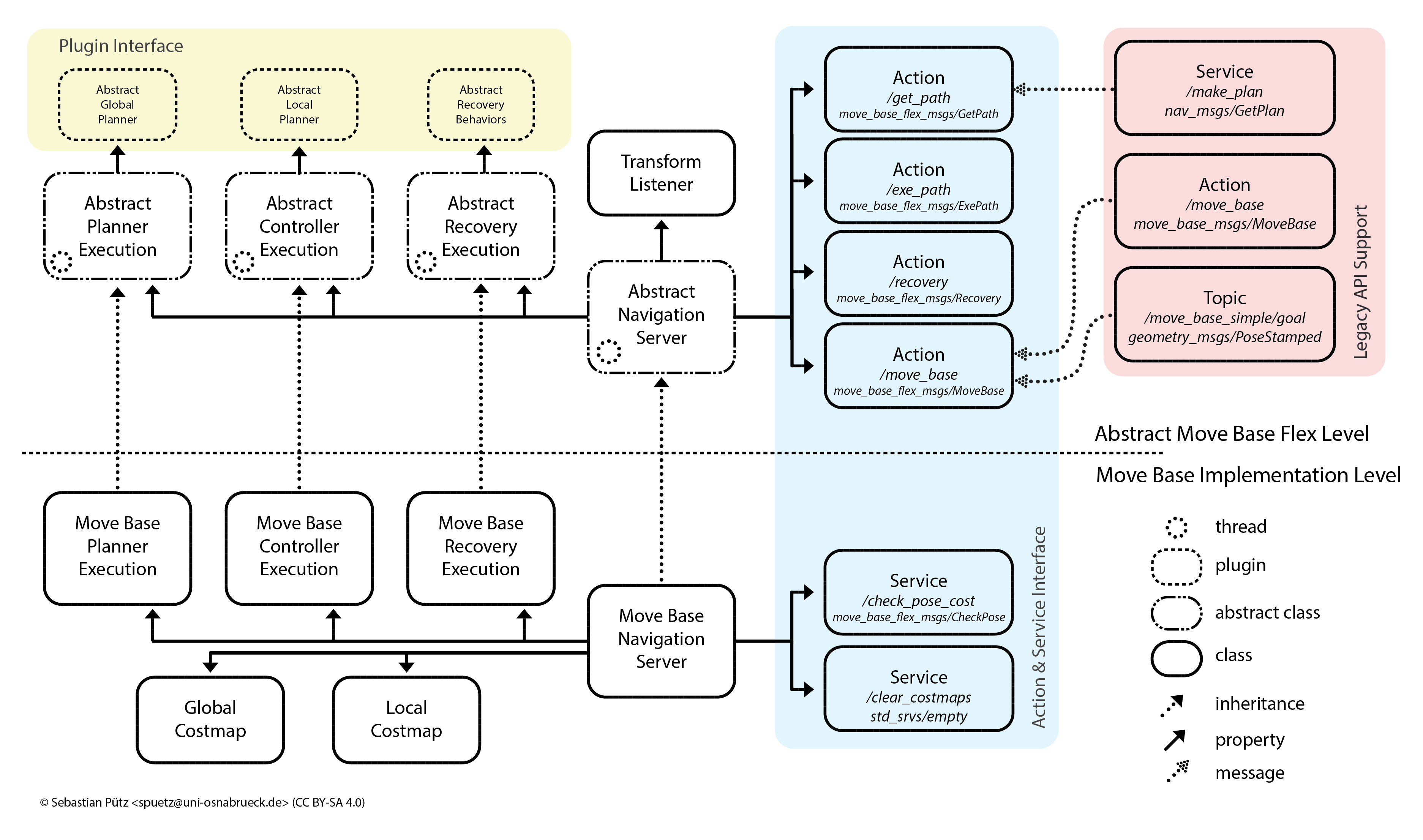
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/magazino/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Build Status
| ROS Distro | GitHub CI | Develop | Documentation | Source Deb | Binary Deb |
|---|---|---|---|---|---|
| Kinetic | |||||
| Melodic | |||||
| Noetic |
CONTRIBUTING
|
|
move_base_flex repositorymbf_abstract_core mbf_abstract_nav mbf_costmap_core mbf_costmap_nav mbf_msgs mbf_simple_nav mbf_utility move_base_flex |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/magazino/move_base_flex.git |
| VCS Type | git |
| VCS Version | noetic |
| Last Updated | 2021-10-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mbf_abstract_core | 0.4.0 |
| mbf_abstract_nav | 0.4.0 |
| mbf_costmap_core | 0.4.0 |
| mbf_costmap_nav | 0.4.0 |
| mbf_msgs | 0.4.0 |
| mbf_simple_nav | 0.4.0 |
| mbf_utility | 0.4.0 |
| move_base_flex | 0.4.0 |
README
Move Base Flex: A Highly Flexible Navigation Framework:
This repository contains Move Base Flex (MBF), a backwards-compatible replacement for move_base. MBF can use existing plugins for move_base, and provides an enhanced version of the same ROS interface. It exposes action servers for planning, controlling and recovering, providing detailed information of the current state and the plugin’s feedback. An external executive logic can use MBF and its actions to perform smart and flexible navigation strategies. For example, at Magazino we have successfully deployed MBF at customer facilities to control TORU robots in highly dynamical environments. Furthermore, MBF enables the use of other map representations, e.g. meshes. The core features are:
- Fully backwards-compatible with current ROS navigation.
- Actions for the submodules planning, controlling and recovering, and services to query the costmaps are provided. This interface allows external executives, e.g. SMACH, or Behavior Trees, to run highly flexible and complex navigation strategies.
- Comprehensive result and feedback information on all actions, including error codes and messages from the loaded plugins. For users still relying on a unique navigation interface, we have extended move_base action with detailed result and feedback information (though we still provide the current one).
- Separation between an abstract navigation framework and concrete implementations, allowing faster development of new applications, e.g. 3D navigation.
- Load multiple planners and controllers, selectable at runtime by setting one of the loaded plugin names in the action goal.
- Concurrency: Parallel planning, recovering, controlling by selecting different concurrency slots when defining the action goal. Only different plugins instances can run in parallel.
Please see also the Move Base Flex Documentation and Tutorials in the ROS wiki. And this repository contains a working minimal configuration for a turtlebot 3.
Concepts & Architecture
We have created Move Base Flex for a larger target group besides the standard developers and users of move_base and 2D navigation based on costmaps, as well as addressed move_base’s limitations. Since robot navigation can be separated into planning and controlling in many cases, even for outdoor scenarios without the benefits of flat terrain, we designed MBF based on abstract planner-, controller- and recovery behavior-execution classes. To accomplish this goal, we created abstract base classes for the nav core BaseLocalPlanner, BaseGlobalPlanner and RecoveryBehavior plugin interfaces, extending the API to provide a richer and more expressive interface without breaking the current move_base plugin API. The new abstract interfaces allow plugins to return valuable information in each execution cycle, e.g. why a valid plan or a velocity command could not be computed. This information is then passed to the external executive logic through MBF planning, navigation or recovering actions’ feedback and result. The planner, controller and recovery behavior execution is implemented in the abstract execution classes without binding the software implementation to 2D costmaps. In our framework, MoveBase is just a particular implementation of a navigation system: its execution classes implement the abstract ones, bind the system to the costmaps. Thereby, the system can easily be used for other approaches, e.g. navigation on meshes or 3D occupancy grid maps. However, we provide a SimpleNavigationServer class without a binding to costmaps.
MBF architecture:
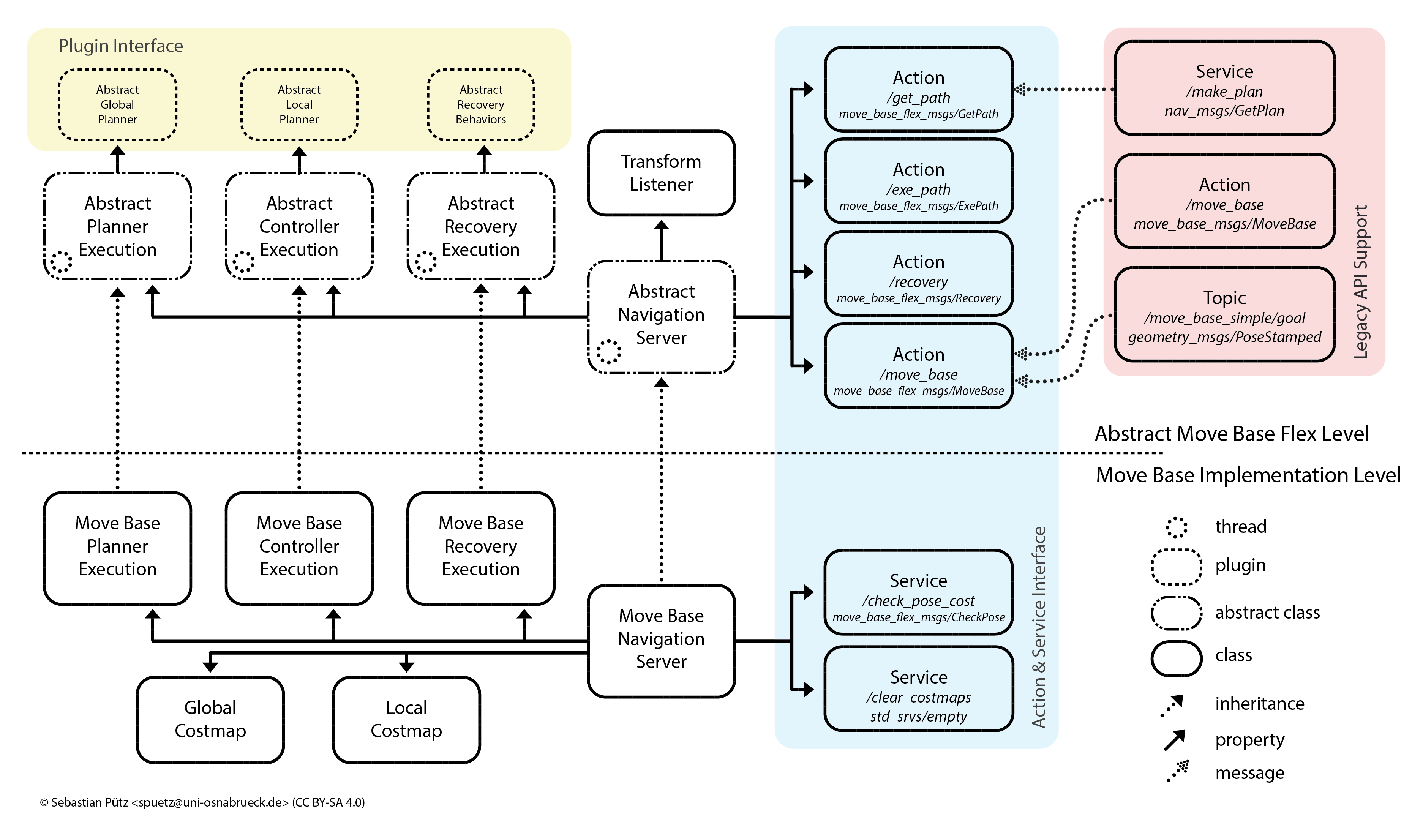
Future Work
MBF is an ongoing project. Some of the improvements that we have planned for the near future are:
- Release MBF Mesh Navigation, see mesh_navigation.
- Auto select the active controller when having concurrently running controllers
- Add Ackermann steering API
- Multi Goal API + Action
- Add new navigation server and core packages using grid_map.
- Constraints-based goal (see issue https://github.com/magazino/move_base_flex/issues/8)
But, of course you are welcome to propose new fancy features and help make them a reality! Pull Requests are always welcome!
Build Status
| ROS Distro | GitHub CI | Develop | Documentation | Source Deb | Binary Deb |
|---|---|---|---|---|---|
| Kinetic | |||||
| Melodic | |||||
| Noetic |