
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
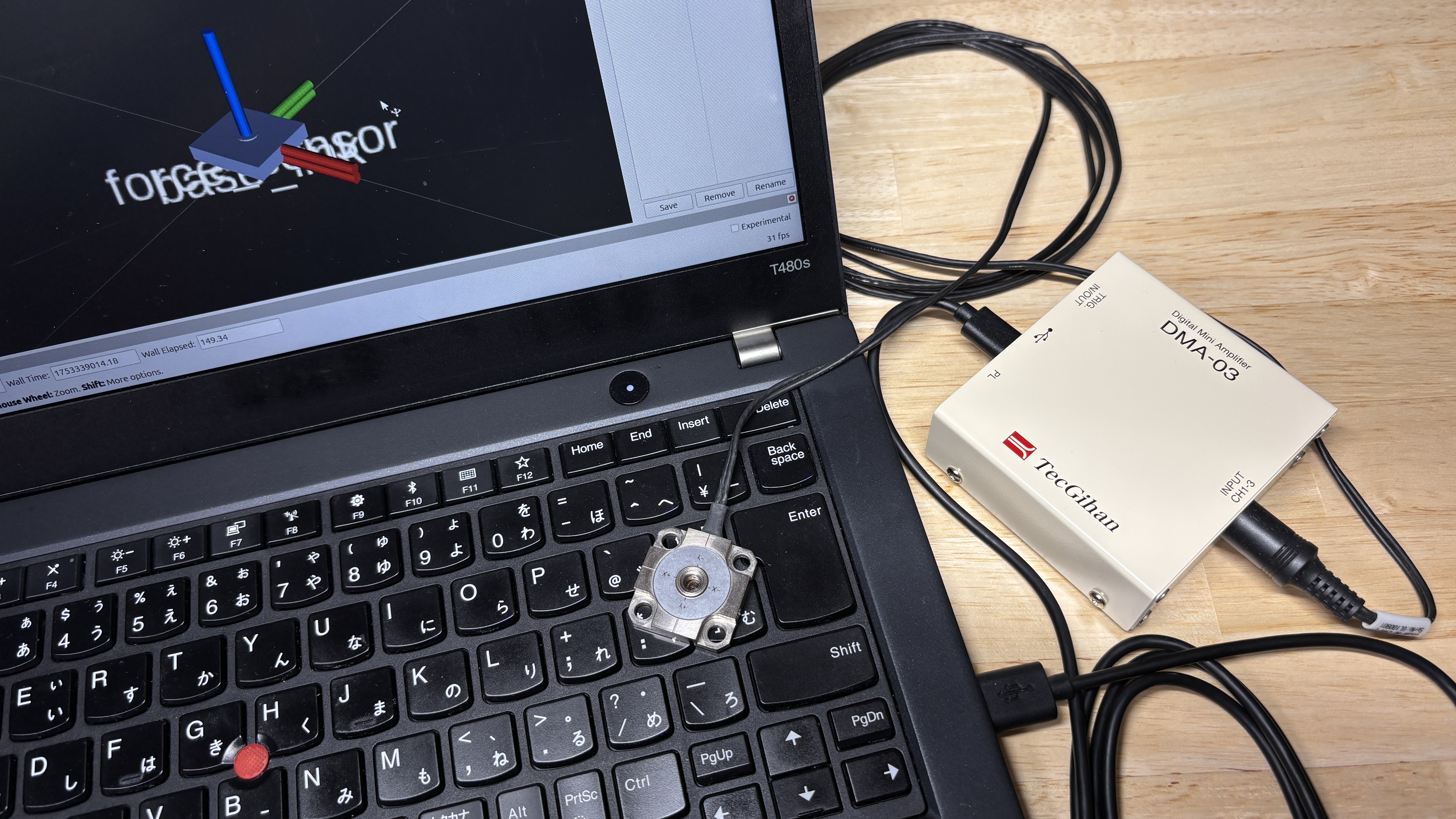
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ

System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]
Messages
Services
Plugins
Recent questions tagged tecgihan_driver at Robotics Stack Exchange
|
|
tecgihan_driver package from tecgihan_driver repotecgihan_driver |
ROS Distro
|
Package Summary
| Version | 0.1.2 |
| License | BSD |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tecgihan/tecgihan_driver.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-09-19 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Shigeru Wakida
- TORK
- Yosuke Yamamoto
Authors
tecgihan_driver
Package Description - パッケージ概要
This package contains softwares for Tec Gihan Co.,Ltd. sensor amplifiers running with Linux and ROS (Robot Operating System).
本パッケージはテック技販製センサアンプの Linux および ROS(Robot Operating System) 用ソフトウェアパッケージです.
Sensors and Amplifiers - 対応センサ・アンプ
-
Tec Gihan Co.,Ltd. - テック技販
- Amplifiers for Robot - ロボット用アンプ
- DMA-03 for Robot
- Force Sensors - 力センサ
- Amplifiers for Robot - ロボット用アンプ
System Requirement - システム要件
tecgihan_driver supports the following system combinations.
tecgihan_driver は下記のシステムの組み合わせに対応しています.
- Ubuntu 22.04 + ROS Humble
- Ubuntu 24.04 + ROS Jazzy
Software Configurations of DMA-03 for Robot Amplifier Driver
- ロボット用 DMA-03 アンプドライバソフトウェア構成
Launch Files - Launch ファイル
-
dma03_demo_launch.xml
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
ロボット用 DMA-03 アンプのデモンストレーションを起動する ROS launch ファイル
- ROS launch file to launch the DMA-03 for Robot amplifier demonstration
-
dma03_ros_launch.py / dma03_ros_launch.xml
- ROS launch file that launches the software of
dma03_ros_publisher.pywith parameter settings
dma03_ros_publisher.pyのソフトウェアをパラメータ設定と合わせて起動する ROS launch ファイル
- ROS launch file that launches the software of
Python Scripts - Python スクリプト
-
dma03_driver.py
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
ロボット用 DMA-03 アンプの Linux デバイス通信・制御ソフトウェア - Linux software that does not depend on ROS
ROS には依存していない Linux ソフトウェア - DMA03DriverForRobot API
- Linux software for DMA-3 for Robot Amplifier communication and control software for DMA-03 amplifier for robots
-
dma03_ros_publisher.py
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
1 を利用して取得したデータを ROS トピックとして発行する ROS ラッパー - Publish when data is acquired from the amplifier, or by a timer event
アンプからのデータ取得時に発行,もしくはタイマーイベントによる発行 - ROS Topic Message Type - ROS トピックメッセージ型
-
Vector3Stamped-
header:Header-
stamp: Type:Time-
sec: Type:int -
nanosec: Type:int
-
-
frame_id: Type:string
-
-
vector: Type:Vector3-
x: Type:float -
y: Type:float -
z: Type:float
-
-
-
- ROS wrapper that publishes data retrieved using 1 as ROS Topics
-
force_to_wrench.py
- A program that converts a
Vector3Stampedtype message topic published bydma03_ros_publisher.pyinto aWrenchStampedtype message topic that can be displayed in RViz and publishes it as a ROS topic
dma03_ros_publisher.pyで発行されるVector3Stamped型メッセージを RViz で表示できるWrenchStamped型メッセージに変換して ROS トピックとして発行するプログラム
- A program that converts a
-
set_udev_rules.py
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Linux で DMA-03 ロボット用アンプの利用権限を設定するプログラム
- A program to set the permissions for using the DMA-03 for Robot amplifier on Linux
Installation - インストール
Before this installation, make sure that the appropriate version of ROS is already installed on your Ubuntu PC.
インストールの前提として既に Ubuntu PC に適切なバージョンの ROS がインストールされていることを確認してください.
- ROS 2 Documentation: Jazzy - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debs.html
- ROS 2 Documentation: Humble - Installation / Ubuntu (deb packages)
- https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html
Open a terminal and install tecgihan_driver with running the following commands line by line.
ターミナルを起動して次の各行のコマンドを実行して tecgihan_driver をインストールします.
-
$ROS_DISTRO: Replace asjazzyorhumble
$ROS_DISTRO:jazzyもしくはhumbleで置き換えてください.
sudo apt update
sudo apt full-upgrade
sudo apt install ros-$ROS_DISTRO-tecgihan-driver
When installing with the apt command above, the user is configured to belong to the dialout group in order to enable access to the DMA-03 for Robot amplifier.
To enable the changes to the group settings, please do one of two methods below.
File truncated at 100 lines see the full file
Changelog for package tecgihan_driver
0.1.2 (2025-09-19)
Added - Added support for DMA-03B.
Fixed - Fixed a bug in full-scale (FS) configuration.
Contributors: Ryota Amakawa
0.1.1 (2025-06-18)
- add .github/workflows/ci.yaml, fix code formats and mod test settings
- mod README.mdInitial Commit
- Contributors: Yosuke Yamamoto
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/dma03_demo_launch.xml
-
- frame_id [default: force_sensor]
- model_file [default: USL08-H6.xacro]
- launch/dma03_ros_launch.xml
-
- debug [default: false]
- timer [default: -0.01]
- frequency [default: 100]
- init_zero [default: false]
- timeout [default: 1.0]
- param_file [default: UL100901.yaml]
- param_path [default: $(find-pkg-share tecgihan_driver)/config/$(var param_file)]
- set_fs [default: false]
- set_itf [default: false]
- serial_no [default: ]
- location [default: ]
- frame_id [default: force_sensor]
- node_name [default: dma03_publisher]