
|
rosbag_pandas package from rosbag_pandas reporosbag_pandas |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.5.4 |
| License | Apache-2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/eurogroep/rosbag_pandas.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-08-25 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Rein Appeldoorn
Authors
- Adam Taylor
rosbag_pandas

Python library (and some tools) for converting ROS bagfiles to Pandas dataframes.
Python library
import rosbag_pandas
# Convert a ROSBag to a dataframe
df = rosbag_pandas.bag_to_dataframe('data/rosout.bag')
df_exclude = rosbag_pandas.bag_to_dataframe('data/example.bag', exclude=['/scan'])
df_include = rosbag_pandas.bag_to_dataframe('data/rosout.bag', include=['/rosout'])
# Select a dataframe key based on topic and (conform msgevalgen pattern http://docs.ros.org/api/rostopic/html/)
print(df['/rosout/header/stamp/secs'].to_string())
# Obtain possible ROS topics from a selection pattern (conform msgevalgen pattern http://docs.ros.org/api/rostopic/html/)
# This will return the possible topics: /pose, /pose/pose, /pose/pose/position
rosbag_pandas.topics_from_keys(["/pose/pose/position/x"])
Key definition
Key definition conform the msgevalgen pattern http://docs.ros.org/api/rostopic/html/). Example:
/pose/pose/position/x
This will select the /pose/position/x property of topic /pose in the message of type http://docs.ros.org/api/geometry_msgs/html/msg/PoseStamped.html.
Scripts
bag_csv
Convert a ROS bag file to a CSV file:
usage: bag_csv [-h] [-b BAG] [-i [INCLUDE [INCLUDE ...]]]
[-e [EXCLUDE [EXCLUDE ...]]] [-o OUTPUT] [-v]
Script to parse bagfile to csv file
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-i [INCLUDE [INCLUDE ...]], --include [INCLUDE [INCLUDE ...]]
List for topics to include
-e [EXCLUDE [EXCLUDE ...]], --exclude [EXCLUDE [EXCLUDE ...]]
List for topics to exclude
-o OUTPUT, --output OUTPUT
name of the output file
-v, --verbose Log verbose
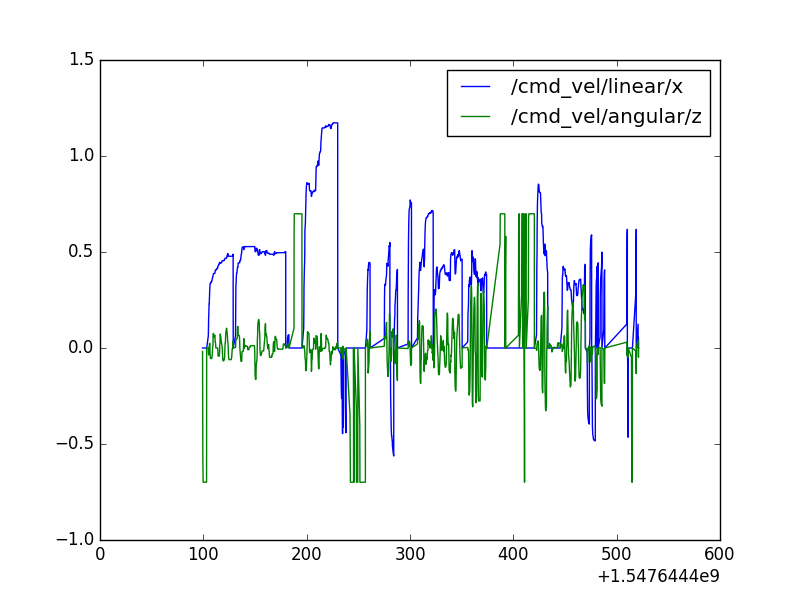
bag_plot
Plot a key (or multiple keys) in a ROS bag file:
usage: bag_plot [-h] -b BAG -k [KEY [KEY ...]] [-y YLIM YLIM] [-c] [-v]
Bagfile key to graph
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-k [KEY [KEY ...]], --key [KEY [KEY ...]]
Key you would like to plot
-y YLIM YLIM, --ylim YLIM YLIM
Set min and max y lim
-c, --combined Graph them all on one
-v, --verbose Log verbose
Example
bag_plot -b 2019-01-16-14-14-37.bag -k /cmd_vel/linear/x /cmd_vel/angular/z -c
bag_print
Print a key (or multiple keys) in a ROS bag file:
usage: bag_print [-h] -b BAG -k [KEY [KEY ...]] [-v]
Print one or multiple bag keys
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-k [KEY [KEY ...]], --key [KEY [KEY ...]]
Key you would like to print
-v, --verbose Log verbose
Changelog for package rosbag_pandas
0.5.4 (2020-08-25)
- chore: Noetic compatibility
- chore: use dict.items() instead of iteritems() iteritems was [removed in python3](https://wiki.python.org/moin/Python3.0#Built-In_Changes). items() is working both on Python2 and Python3
- docs: removed extra round bracket
- Update .travis.yml
- Bag plot example in readme
- Bag plot image for doc
- Contributors: Rein Appeldoorn, Valerio Magnago
0.5.3 (2019-03-21)
- flatdict dep in package
- Contributors: Rein Appeldoorn
0.5.2 (2019-02-27)
- Update .travis.yml
- Update README.md
- only module import
- required arguments
- Contributors: Rein Appeldoorn
0.5.1 (2018-11-02)
- Refactor rosbag_pandas
- Support dynamic arrays
- Key pattern specification conform rostopic msgevalgen
- Renamed scripts (and fixed scripts)
- Added new unit test
- Cleanup package
- pep8 compliance
- Updated documentation README
- Fork from [https://github.com/aktaylor08/RosbagPandas]{.title-ref}, see [https://github.com/aktaylor08/RosbagPandas/issues/11]{.title-ref}
- Contributors: Adam Taylor, Felix, Low Kian Seong, Ramon Wijnands, Rein Appeldoorn, itsb, turtlebot
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rosbag_pandas at Robotics Stack Exchange
|
|
rosbag_pandas package from rosbag_pandas reporosbag_pandas |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.5.4 |
| License | Apache-2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/eurogroep/rosbag_pandas.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-08-25 |
| Dev Status | MAINTAINED |
| CI status | Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Rein Appeldoorn
Authors
- Adam Taylor
rosbag_pandas
Python library (and some tools) for converting ROS bagfiles to Pandas dataframes.
Python library
import rosbag_pandas
# Convert a ROSBag to a dataframe
df = rosbag_pandas.bag_to_dataframe('data/rosout.bag')
df_exclude = rosbag_pandas.bag_to_dataframe('data/example.bag', exclude=['/scan'])
df_include = rosbag_pandas.bag_to_dataframe('data/rosout.bag', include=['/rosout'])
# Select a dataframe key based on topic and (conform msgevalgen pattern http://docs.ros.org/api/rostopic/html/)
print(df['/rosout/header/stamp/secs'].to_string())
# Obtain possible ROS topics from a selection pattern (conform msgevalgen pattern http://docs.ros.org/api/rostopic/html/)
# This will return the possible topics: /pose, /pose/pose, /pose/pose/position
rosbag_pandas.topics_from_keys(["/pose/pose/position/x"])
Key definition
Key definition conform the msgevalgen pattern http://docs.ros.org/api/rostopic/html/). Example:
/pose/pose/position/x
This will select the /pose/position/x property of topic /pose in the message of type http://docs.ros.org/api/geometry_msgs/html/msg/PoseStamped.html.
Scripts
bag_csv
Convert a ROS bag file to a CSV file:
usage: bag_csv [-h] [-b BAG] [-i [INCLUDE [INCLUDE ...]]]
[-e [EXCLUDE [EXCLUDE ...]]] [-o OUTPUT] [-v]
Script to parse bagfile to csv file
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-i [INCLUDE [INCLUDE ...]], --include [INCLUDE [INCLUDE ...]]
List for topics to include
-e [EXCLUDE [EXCLUDE ...]], --exclude [EXCLUDE [EXCLUDE ...]]
List for topics to exclude
-o OUTPUT, --output OUTPUT
name of the output file
-v, --verbose Log verbose
bag_plot
Plot a key (or multiple keys) in a ROS bag file:
usage: bag_plot [-h] -b BAG -k [KEY [KEY ...]] [-y YLIM YLIM] [-c] [-v]
Bagfile key to graph
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-k [KEY [KEY ...]], --key [KEY [KEY ...]]
Key you would like to plot
-y YLIM YLIM, --ylim YLIM YLIM
Set min and max y lim
-c, --combined Graph them all on one
-v, --verbose Log verbose
Example
bag_plot -b 2019-01-16-14-14-37.bag -k /cmd_vel/linear/x /cmd_vel/angular/z -c
bag_print
Print a key (or multiple keys) in a ROS bag file:
usage: bag_print [-h] -b BAG -k [KEY [KEY ...]] [-v]
Print one or multiple bag keys
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-k [KEY [KEY ...]], --key [KEY [KEY ...]]
Key you would like to print
-v, --verbose Log verbose
Changelog for package rosbag_pandas
0.5.4 (2020-08-25)
- chore: Noetic compatibility
- chore: use dict.items() instead of iteritems() iteritems was [removed in python3](https://wiki.python.org/moin/Python3.0#Built-In_Changes). items() is working both on Python2 and Python3
- docs: removed extra round bracket
- Update .travis.yml
- Bag plot example in readme
- Bag plot image for doc
- Contributors: Rein Appeldoorn, Valerio Magnago
0.5.3 (2019-03-21)
- flatdict dep in package
- Contributors: Rein Appeldoorn
0.5.2 (2019-02-27)
- Update .travis.yml
- Update README.md
- only module import
- required arguments
- Contributors: Rein Appeldoorn
0.5.1 (2018-11-02)
- Refactor rosbag_pandas
- Support dynamic arrays
- Key pattern specification conform rostopic msgevalgen
- Renamed scripts (and fixed scripts)
- Added new unit test
- Cleanup package
- pep8 compliance
- Updated documentation README
- Fork from [https://github.com/aktaylor08/RosbagPandas]{.title-ref}, see [https://github.com/aktaylor08/RosbagPandas/issues/11]{.title-ref}
- Contributors: Adam Taylor, Felix, Low Kian Seong, Ramon Wijnands, Rein Appeldoorn, itsb, turtlebot
Wiki Tutorials
Source Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rosbag_pandas at Robotics Stack Exchange
|
|
rosbag_pandas package from rosbag_pandas reporosbag_pandas |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.5.4 |
| License | Apache-2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/eurogroep/rosbag_pandas.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-08-25 |
| Dev Status | MAINTAINED |
| CI status |
|
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Rein Appeldoorn
Authors
- Adam Taylor
rosbag_pandas
Python library (and some tools) for converting ROS bagfiles to Pandas dataframes.
Python library
import rosbag_pandas
# Convert a ROSBag to a dataframe
df = rosbag_pandas.bag_to_dataframe('data/rosout.bag')
df_exclude = rosbag_pandas.bag_to_dataframe('data/example.bag', exclude=['/scan'])
df_include = rosbag_pandas.bag_to_dataframe('data/rosout.bag', include=['/rosout'])
# Select a dataframe key based on topic and (conform msgevalgen pattern http://docs.ros.org/api/rostopic/html/)
print(df['/rosout/header/stamp/secs'].to_string())
# Obtain possible ROS topics from a selection pattern (conform msgevalgen pattern http://docs.ros.org/api/rostopic/html/)
# This will return the possible topics: /pose, /pose/pose, /pose/pose/position
rosbag_pandas.topics_from_keys(["/pose/pose/position/x"])
Key definition
Key definition conform the msgevalgen pattern http://docs.ros.org/api/rostopic/html/). Example:
/pose/pose/position/x
This will select the /pose/position/x property of topic /pose in the message of type http://docs.ros.org/api/geometry_msgs/html/msg/PoseStamped.html.
Scripts
bag_csv
Convert a ROS bag file to a CSV file:
usage: bag_csv [-h] [-b BAG] [-i [INCLUDE [INCLUDE ...]]]
[-e [EXCLUDE [EXCLUDE ...]]] [-o OUTPUT] [-v]
Script to parse bagfile to csv file
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-i [INCLUDE [INCLUDE ...]], --include [INCLUDE [INCLUDE ...]]
List for topics to include
-e [EXCLUDE [EXCLUDE ...]], --exclude [EXCLUDE [EXCLUDE ...]]
List for topics to exclude
-o OUTPUT, --output OUTPUT
name of the output file
-v, --verbose Log verbose
bag_plot
Plot a key (or multiple keys) in a ROS bag file:
usage: bag_plot [-h] -b BAG -k [KEY [KEY ...]] [-y YLIM YLIM] [-c] [-v]
Bagfile key to graph
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-k [KEY [KEY ...]], --key [KEY [KEY ...]]
Key you would like to plot
-y YLIM YLIM, --ylim YLIM YLIM
Set min and max y lim
-c, --combined Graph them all on one
-v, --verbose Log verbose
Example
bag_plot -b 2019-01-16-14-14-37.bag -k /cmd_vel/linear/x /cmd_vel/angular/z -c
bag_print
Print a key (or multiple keys) in a ROS bag file:
usage: bag_print [-h] -b BAG -k [KEY [KEY ...]] [-v]
Print one or multiple bag keys
optional arguments:
-h, --help show this help message and exit
-b BAG, --bag BAG Bag file to read
-k [KEY [KEY ...]], --key [KEY [KEY ...]]
Key you would like to print
-v, --verbose Log verbose
Changelog for package rosbag_pandas
0.5.4 (2020-08-25)
- chore: Noetic compatibility
- chore: use dict.items() instead of iteritems() iteritems was [removed in python3](https://wiki.python.org/moin/Python3.0#Built-In_Changes). items() is working both on Python2 and Python3
- docs: removed extra round bracket
- Update .travis.yml
- Bag plot example in readme
- Bag plot image for doc
- Contributors: Rein Appeldoorn, Valerio Magnago
0.5.3 (2019-03-21)
- flatdict dep in package
- Contributors: Rein Appeldoorn
0.5.2 (2019-02-27)
- Update .travis.yml
- Update README.md
- only module import
- required arguments
- Contributors: Rein Appeldoorn
0.5.1 (2018-11-02)
- Refactor rosbag_pandas
- Support dynamic arrays
- Key pattern specification conform rostopic msgevalgen
- Renamed scripts (and fixed scripts)
- Added new unit test
- Cleanup package
- pep8 compliance
- Updated documentation README
- Fork from [https://github.com/aktaylor08/RosbagPandas]{.title-ref}, see [https://github.com/aktaylor08/RosbagPandas/issues/11]{.title-ref}
- Contributors: Adam Taylor, Felix, Low Kian Seong, Ramon Wijnands, Rein Appeldoorn, itsb, turtlebot