No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
No version for distro noetic. Known supported distros are highlighted in the buttons above.
No version for distro ardent. Known supported distros are highlighted in the buttons above.
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
No version for distro crystal. Known supported distros are highlighted in the buttons above.
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
No version for distro dashing. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.

|
map_transformer package from map_transformer repomap_transformer |
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.3 |
| License | Apache 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/osrf/map_transformer.git |
| VCS Type | git |
| VCS Version | foxy |
| Last Updated | 2021-01-27 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Transform points between maps with non-linear relationships
Additional Links
No additional links.
Maintainers
- Geoff
Authors
No additional authors.
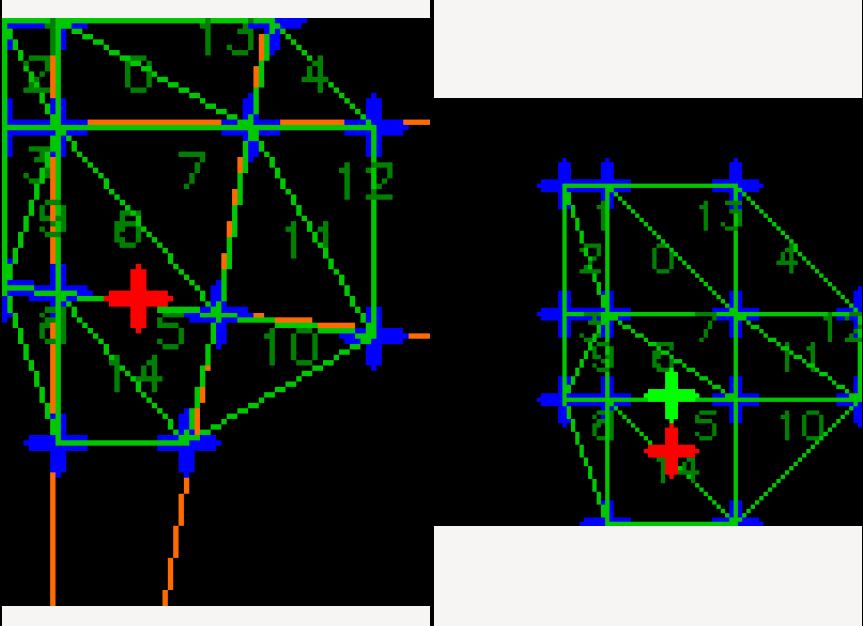
Map Transformer
Ths Map Transformer library provides transformations between two maps which may be close but not quite aligned, with the alignment difference varying across the map. A point provided in the coordinate space of one map is transformed into the coordinate space of the other, taking account of the non-linear transforms to ensure it is at the equivalent location in the map.
For usage instructions, see the documentation.
CHANGELOG
1.0.0 (2021-01-15)
- Initial release
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Dependant Packages
No known dependants.
Launch files
No launch files found
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged map_transformer at Robotics Stack Exchange
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro lunar. Known supported distros are highlighted in the buttons above.
No version for distro jade. Known supported distros are highlighted in the buttons above.
No version for distro indigo. Known supported distros are highlighted in the buttons above.
No version for distro hydro. Known supported distros are highlighted in the buttons above.
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.