
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller

Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page - Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
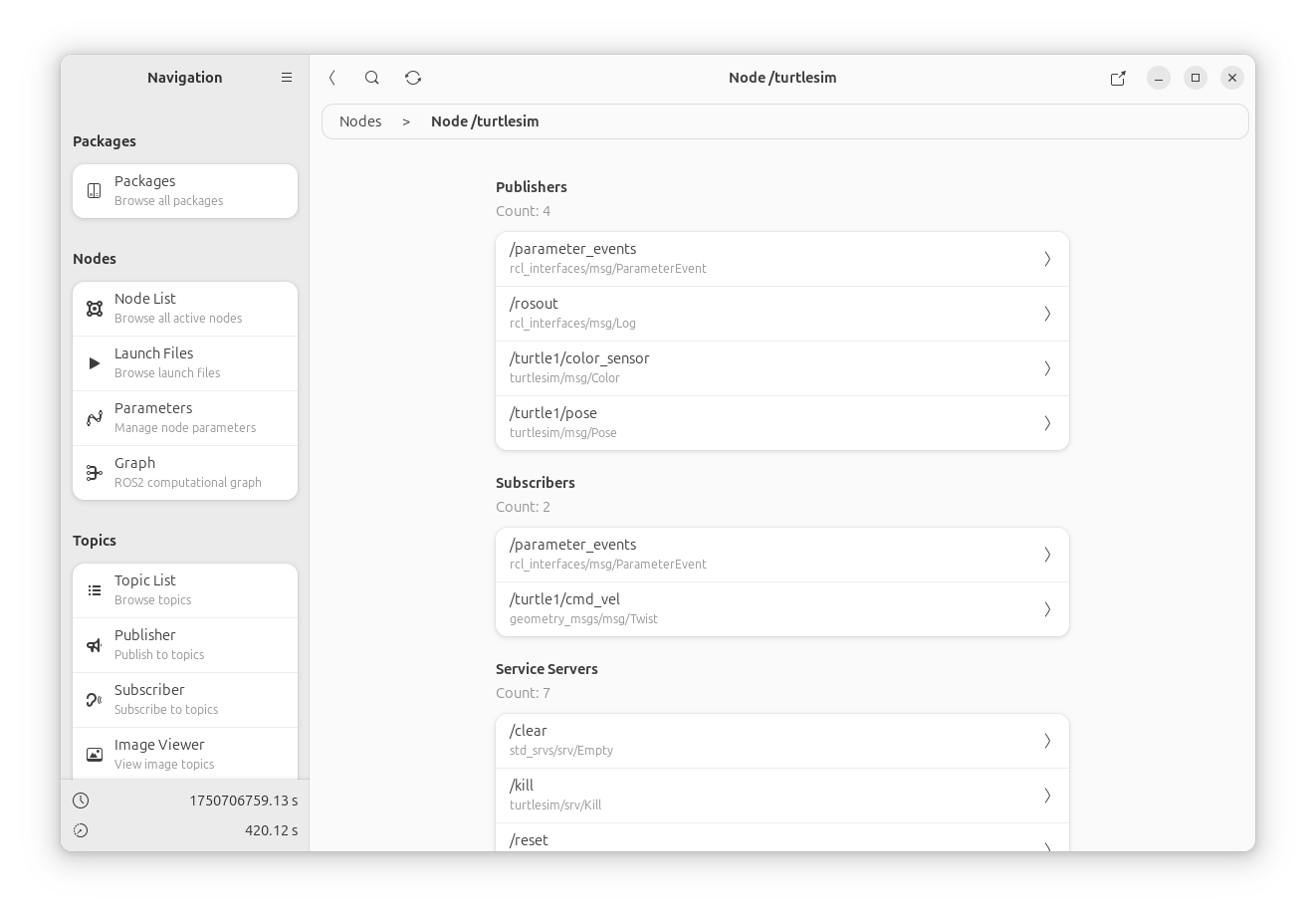 - View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page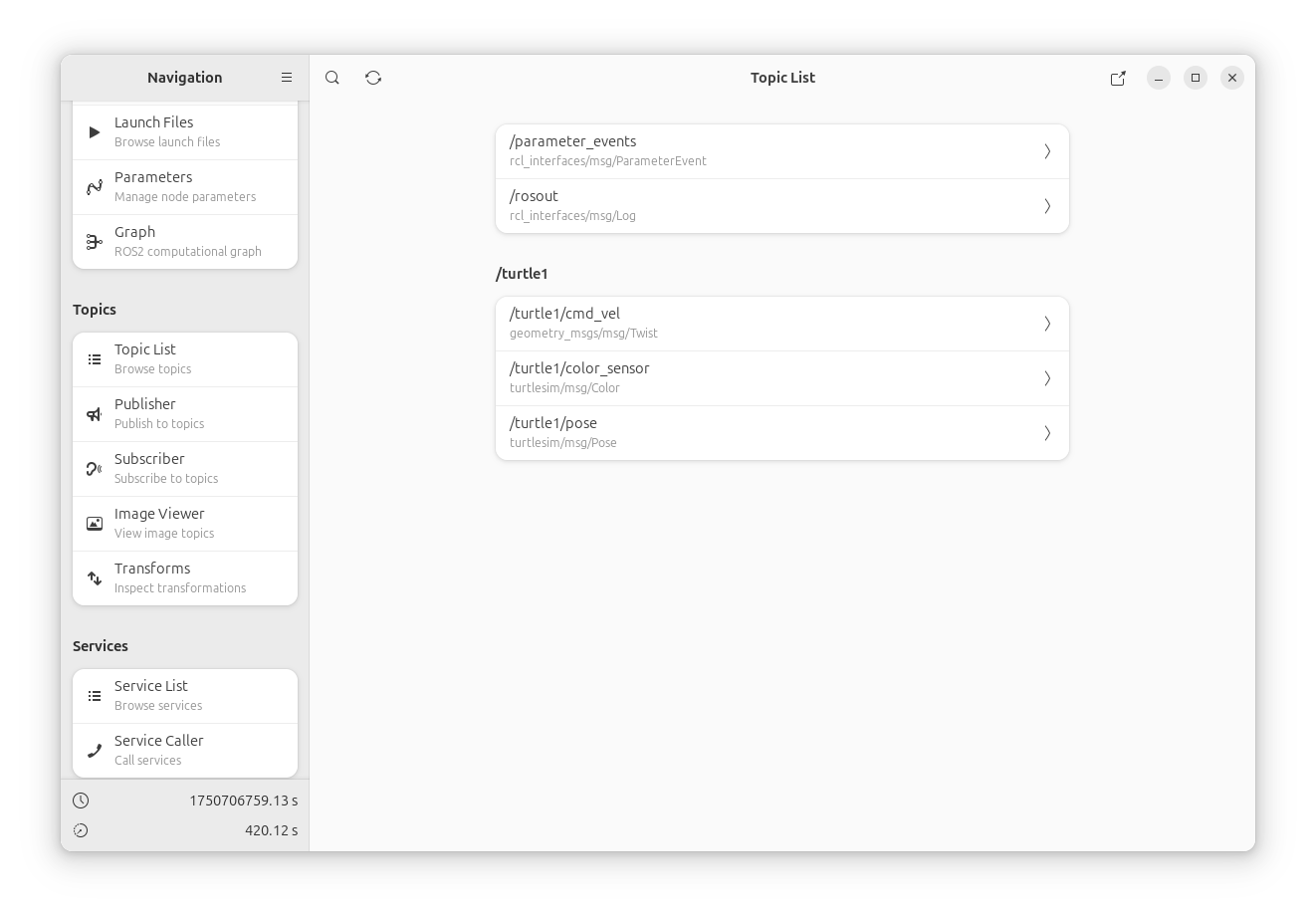 - Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
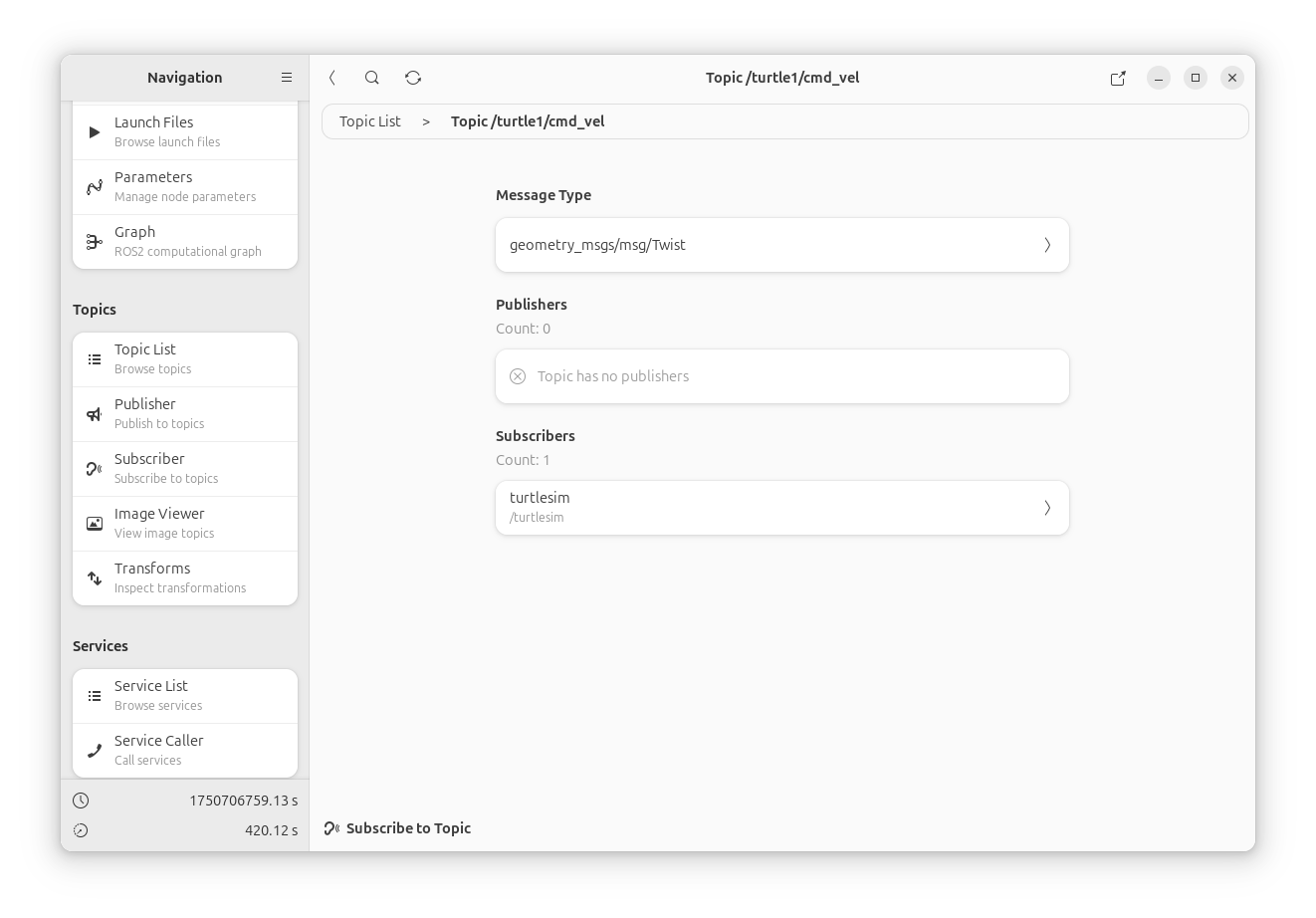 - View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
 - Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
 - Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page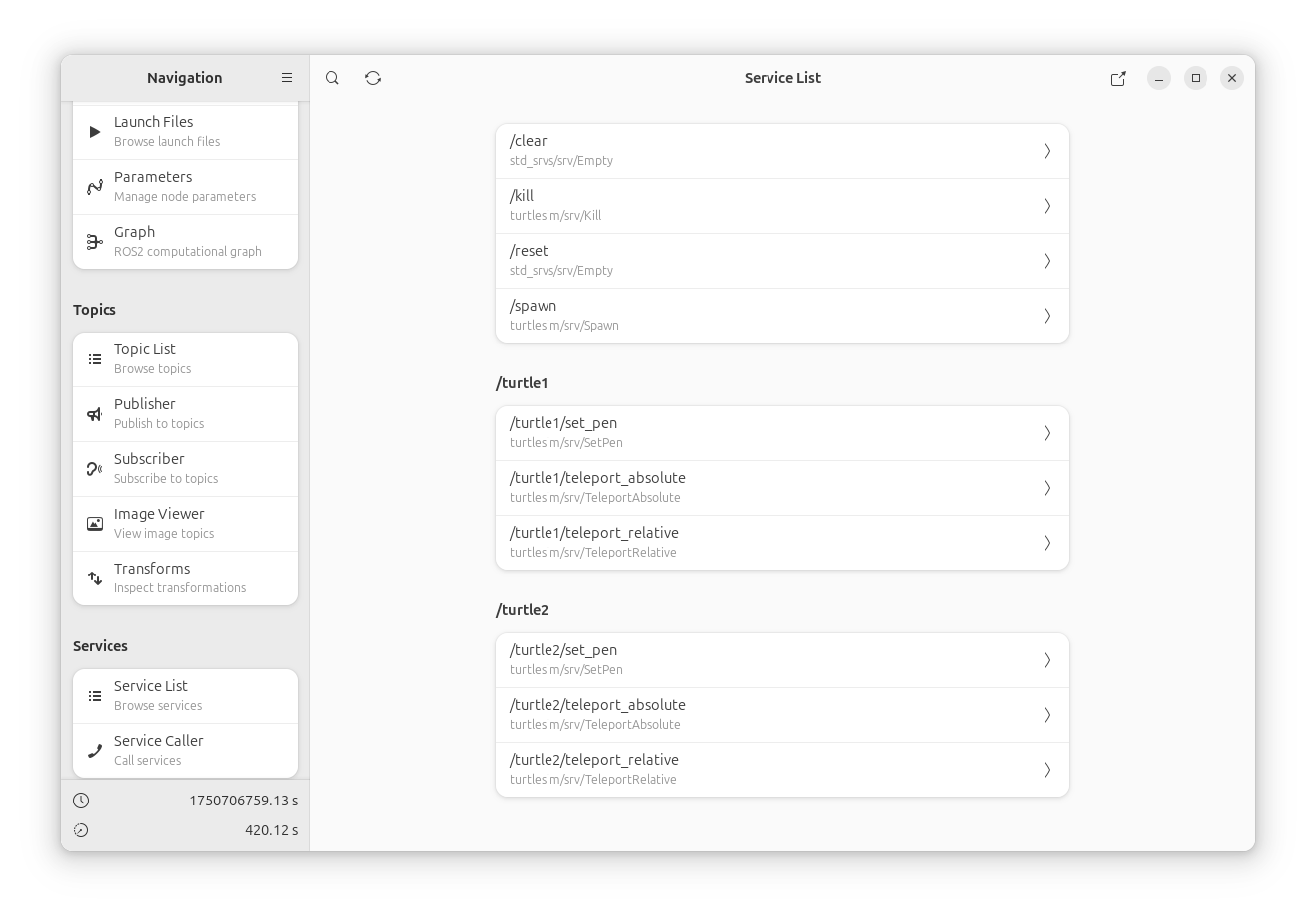 - Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
 - View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
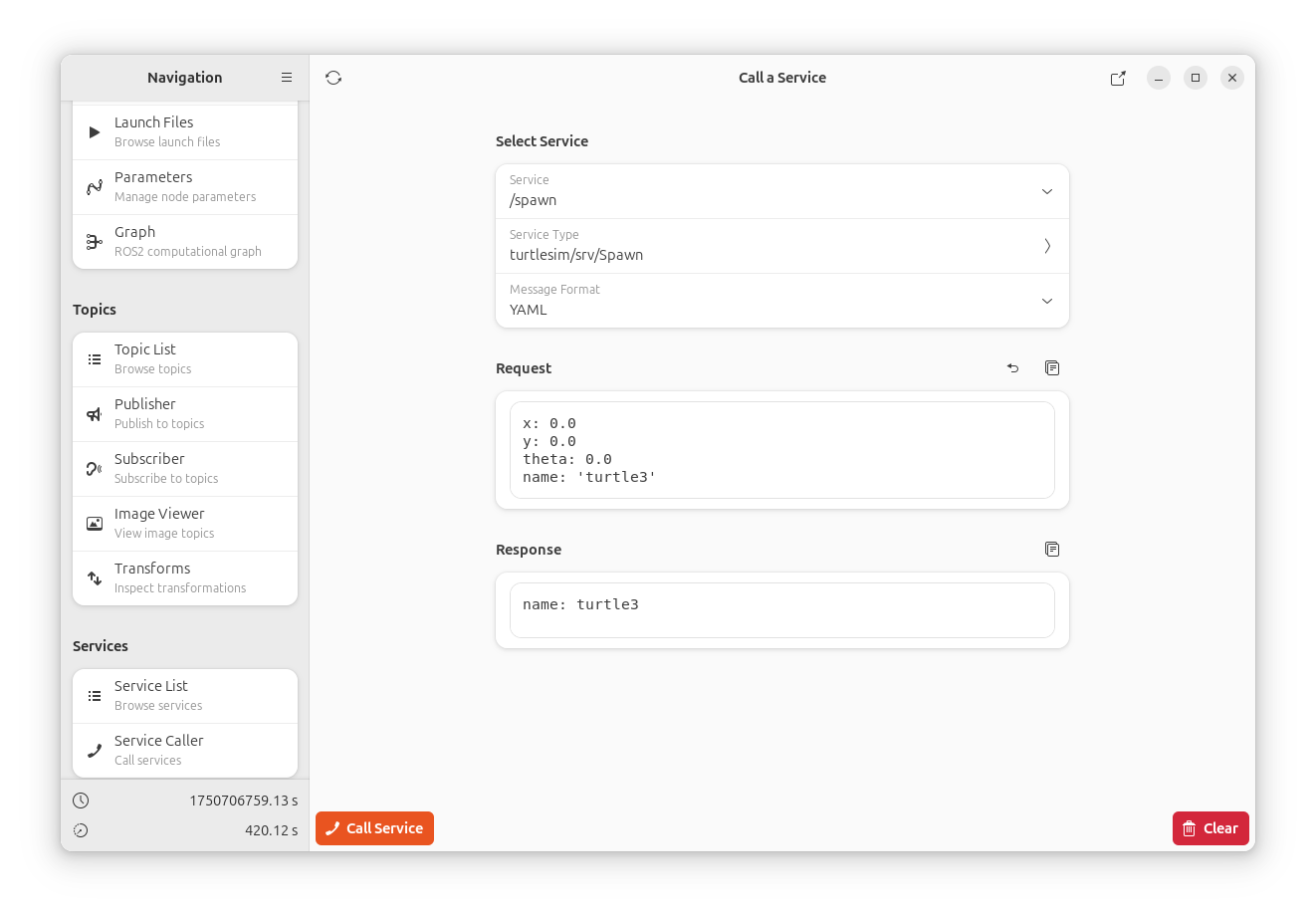 - Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
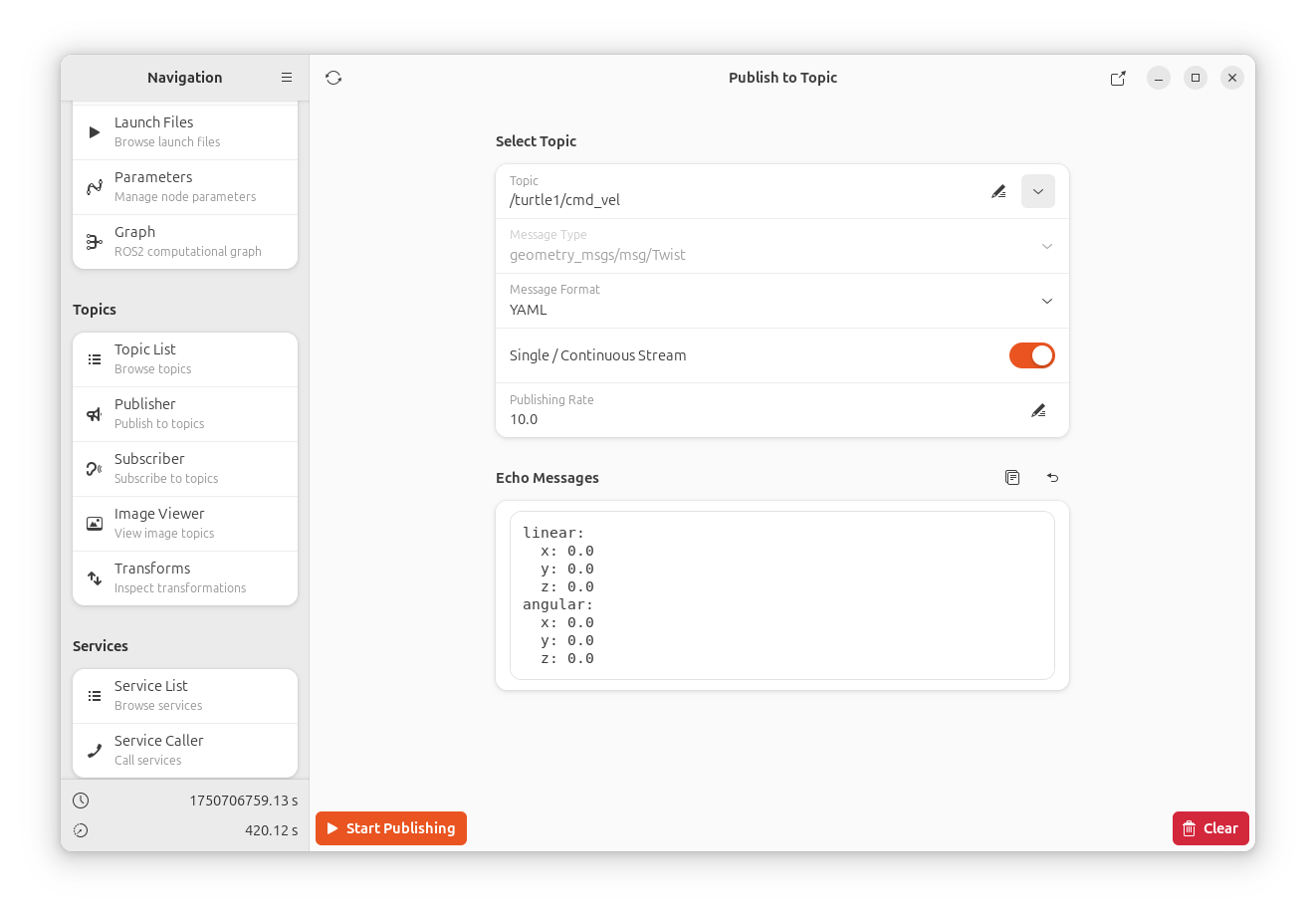
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
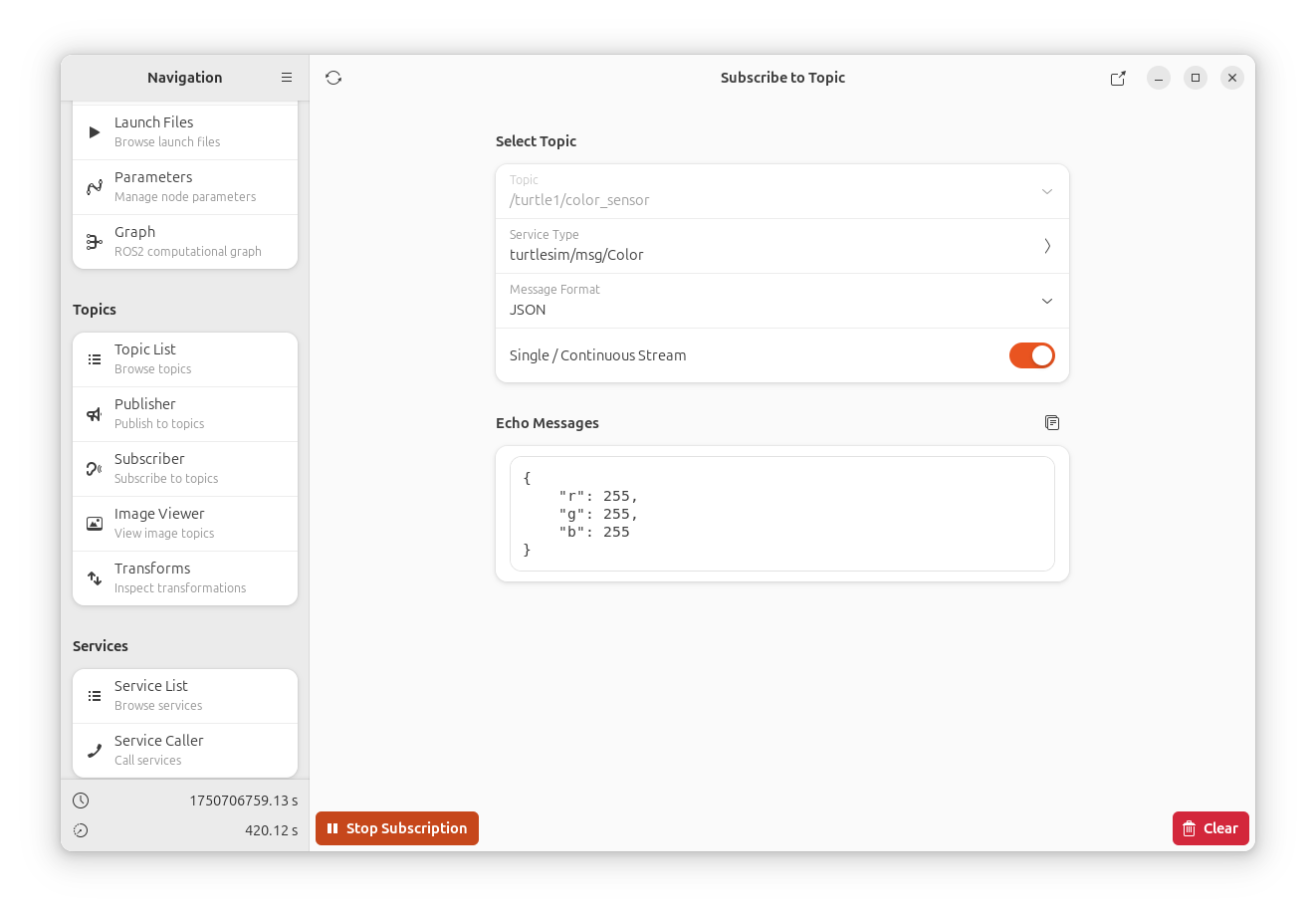
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
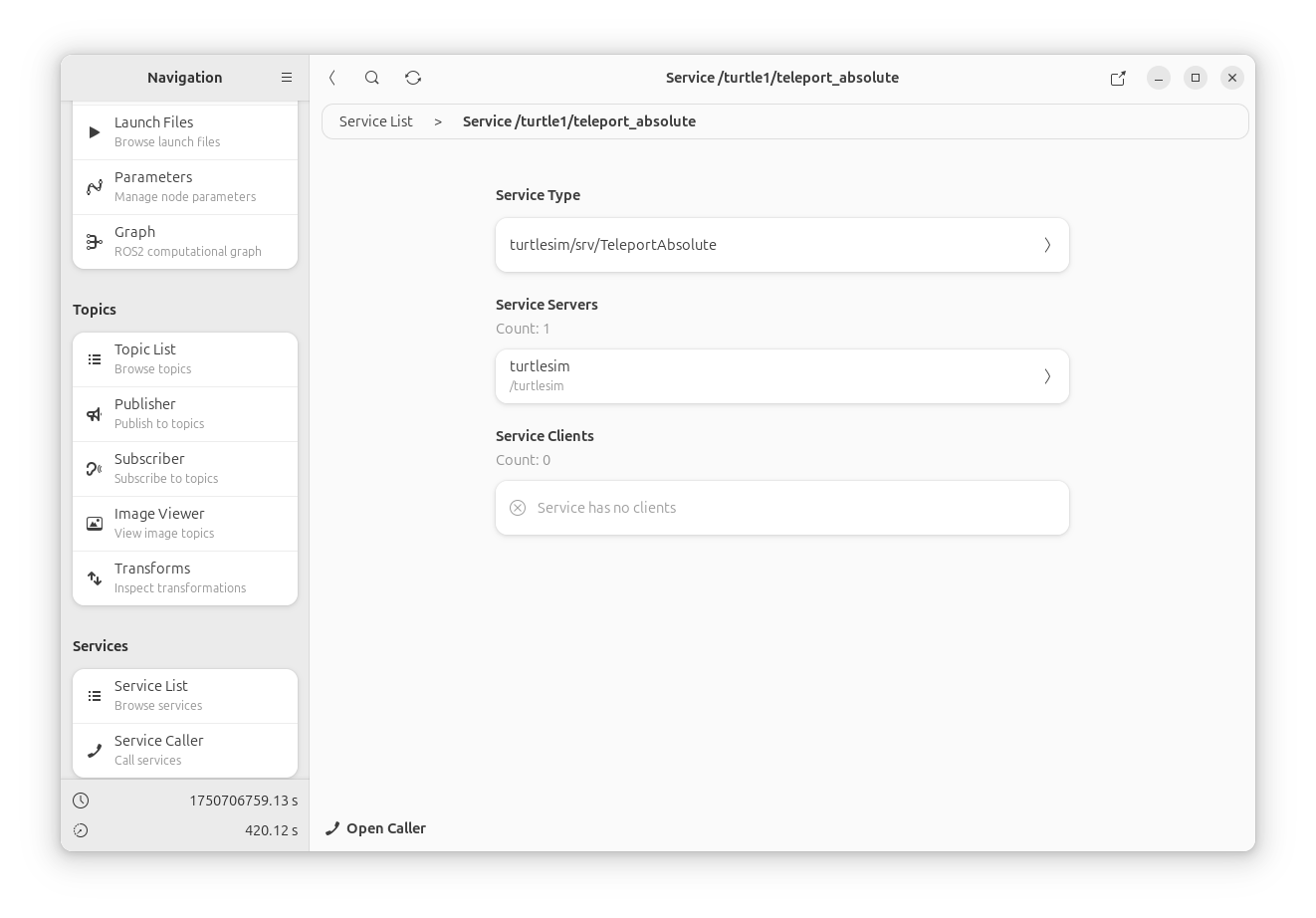
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged insight_gui at Robotics Stack Exchange
|
|
insight_gui package from insight_gui repoinsight_gui |
ROS Distro
|
Package Summary
| Version | 0.1.3 |
| License | GPL-3.0-only |
| Build type | AMENT_PYTHON |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/julianmueller/insight_gui.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-10-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Julian Müller
Authors
- Julian Müller
Insight - a minimalist GUI for ROS2
Insight is a minimalist GUI alternative to rqt. It is a GTK4-based tool for exploring ROS2 topics, services, and messages, featuring the GNOME Adwaita style.
Features
Nodes
### Node List Page
- Browse all active ROS2 nodes
- Group nodes by namespace
- Search and filter nodes
- View hidden nodes
### Node Info Page
- View detailed node information
- Display node publishers, subscribers
- Show service clients and servers and action clients and servers
- Show Node parameters and jump to the parameter edit page
Topics
### Topic List Page
- Browse all available ROS2 topics
- Group topics by namespace
- Search and filter topics
- View topic types and hidden topics
### Topic Info Page
- View detailed topic information
- Display topic interface types and their definition
- Show publishers and subscribers
### Topic Publisher Page
- Publish messages to ROS2 topics
- Edit the published message as YAML/JSON/CSV
- Publish once or as continuous stream
### Topic Subscriber Page
- Subscribe to ROS2 topics
- Receive messages as YAML/JSON/CSV
- Message history and filtering
- Get only one message or the continuous stream
Services
### Service List Page
- Browse all available ROS2 services
- Group services by namespace
- Search and filter services
- View service types and hidden services
### Service Info
- View detailed service information
- Show service providers
- Display service request/response interface type and definition
- Quickly jump to the service call page
### Service Call Page
- Call ROS2 services
- Edit the service request as YAML/JSON/CSV
- View service responses
File truncated at 100 lines see the full file
Changelog for package insight_gui
0.1.3 (2025-10-06)
- fix build bug and move .ui files to share
- fix pytests
- Contributors: Julian Müller
0.1.2 (2025-09-25)
- Merge pull request #4 from julianmueller/codex/fix-package.xml-dependencies-for-builds
- Restore rosdep keys for GTK stack build dependencies
- fix label length issue
- replace multicast page icon
- add multicast send/receive page
- add canvas sidebar
- update styling of canvas blocks
- working on canvas, graph and introduction of tf tree
- work on grpah page,
- add static stransformer page, and more icons
- add overview page
- Contributors: Julian Müller
0.1.1 (2025-06-28)
- update dependencies
- Contributors: Julian Müller
0.1.0 (2025-06-23)
- first release
- Contributors: Julian Müller
Package Dependencies
| Deps | Name |
|---|---|
| rclpy | |
| ros2cli | |
| ros2launch | |
| tf2_ros | |
| tf_transformations | |
| turtlesim | |
| ament_copyright | |
| ament_flake8 | |
| ament_pep257 |