
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:

rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:

It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
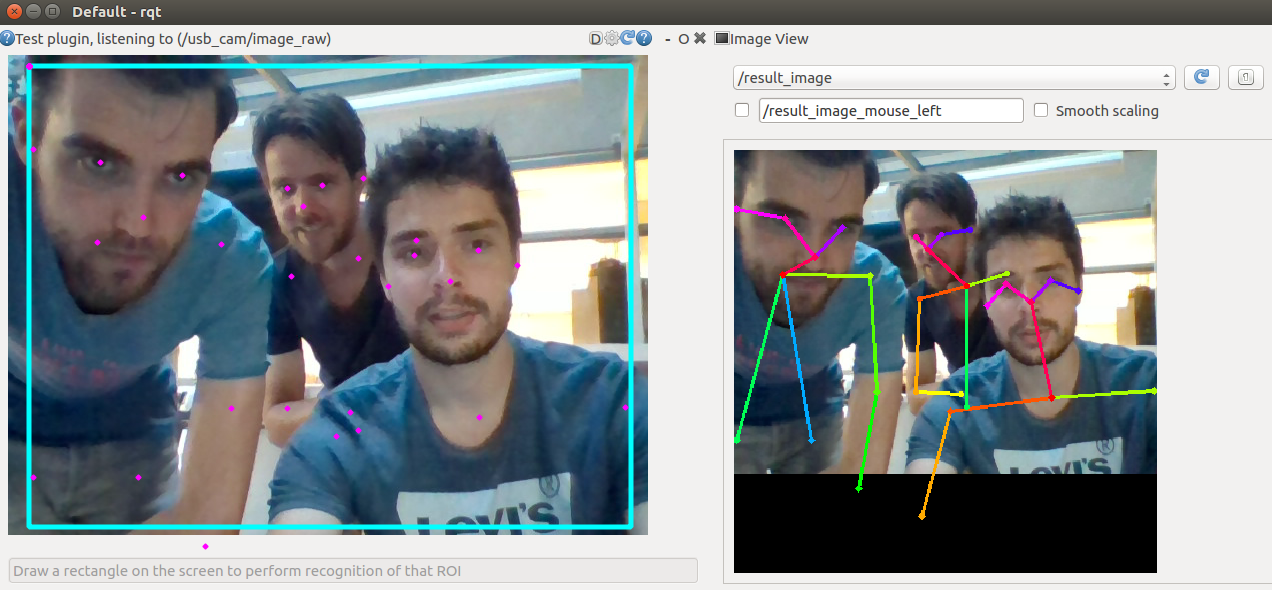
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged image_recognition_openpose at Robotics Stack Exchange
Package Summary
| Version | 0.0.5 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/tue-robotics/image_recognition.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-12-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Rein Appeldoorn
Authors
Openpose image recognition
ROS Wrapper for openpose https://github.com/CMU-Perceptual-Computing-Lab/openpose
Installation notes
This ROS wrapper makes use of the Openpose python interface.
Please follow the installation manual and ensure that the BUILD_PYTHON flag is turned on while running CMake. Also make sure that you install a release instead of the latest master version with CUDA8 since Torch (image_recognition_openface) cannot handle CUDA10.
export OPENPOSE_INSTALL_PATH=~/openpose && \
mkdir -p $OPENPOSE_INSTALL_PATH && \
wget https://github.com/CMU-Perceptual-Computing-Lab/openpose/archive/v1.4.0.tar.gz -O /tmp/v1.4.0.tar.gz && \
tar -xvf /tmp/v1.4.0.tar.gz -C /tmp/ && cp -r /tmp/openpose-1.4.0/* $OPENPOSE_INSTALL_PATH && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cuda.sh && \
$OPENPOSE_INSTALL_PATH/ubuntu/install_cudnn.sh && \
wget https://github.com/CMU-Perceptual-Computing-Lab/caffe/archive/1.0.tar.gz -O /tmp/1.0.tar.gz && \
tar -xvf /tmp/1.0.tar.gz -C /tmp/ && cp -r /tmp/caffe-1.0/* $OPENPOSE_INSTALL_PATH/3rdparty/caffe && \
cd $OPENPOSE_INSTALL_PATH && mkdir -p build && cd build && \
cmake .. -DBUILD_PYTHON=1 -DCUDA_TOOLKIT_ROOT_DIR=/usr/local/cuda && \
make -j`nproc` && \
sudo make install
Scripts
detect_poses
Example for the following picture:
rosrun image_recognition_openpose detect_poses image `rospack find image_recognition_openpose`/doc/example.jpg
Output:
It also works with a webcam stream, usage:
usage: detect_poses [-h] [--pose_model POSE_MODEL]
[--net_input_size NET_INPUT_SIZE]
[--net_output_size NET_OUTPUT_SIZE]
[--num_scales NUM_SCALES] [--scale_gap SCALE_GAP]
[--num_gpu_start NUM_GPU_START]
[--overlay_alpha OVERLAY_ALPHA]
[--python_path PYTHON_PATH]
model_folder {image,cam} ...
Detect poses in an image
positional arguments:
model_folder Path where the models are stored
{image,cam} Mode
image Use image mode
cam Use cam mode
optional arguments:
-h, --help show this help message and exit
--pose_model POSE_MODEL
What pose model to use (default: BODY_25)
--net_input_size NET_INPUT_SIZE
Net input size (default: -1x368)
--net_output_size NET_OUTPUT_SIZE
Net output size (default: -1x-1)
--num_scales NUM_SCALES
Num scales (default: 1)
--scale_gap SCALE_GAP
Scale gap (default: 0.3)
--num_gpu_start NUM_GPU_START
What GPU support (default: 0)
--overlay_alpha OVERLAY_ALPHA
Overlay alpha for the output image (default: 0.6)
--python_path PYTHON_PATH
Python path where Openpose is stored (default:
/usr/local/python/)
openpose_node
How-to
Run the image_recognition_openpose node in one terminal, e.g.:
rosrun image_recognition_openpose openpose_node
Next step is starting the image_recognition_Rqt test gui (https://github.com/tue-robotics/image_recognition_rqt)
rosrun image_recognition_rqt test_gui
Configure the service you want to call with the gear-wheel in the top-right corner of the screen. If everything is set-up, draw a rectangle in the image and ask the service for detections:
You will see that the result of the detection will prompt in a dialog combo box. Also the detections will be drawn on the image. The ROS node also published the result image, you can easily view this image using rqt_image_view.
Changelog for package image_recognition_openpose
0.0.5 (2019-06-08)
- Working openpose python wrapper
- refactor package xml to 2.0
- rename ROS pkgs with image_recognition_prefix
- Contributors: Arpit Aggarwal, Loy van Beek, Rein Appeldoorn
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| cv_bridge | |
| diagnostic_updater | |
| image_recognition_msgs | |
| image_recognition_util | |
| rospy | |
| sensor_msgs | |
| python-sphinx-autoapi-pip | |
| python-sphinx-rtd-theme-pip | |
| catkin_lint_cmake |