
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
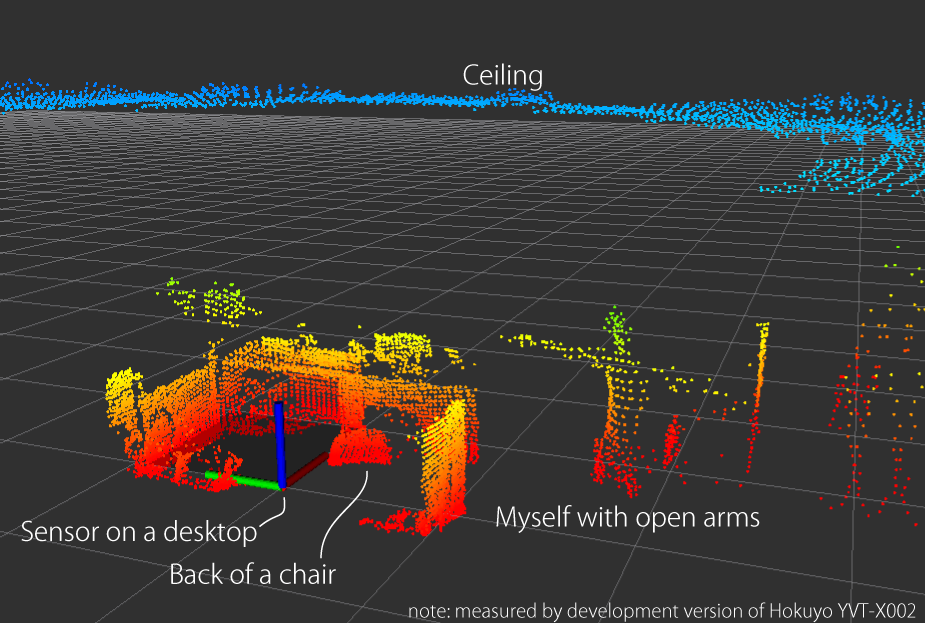
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2018-03-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug (#30)
- Fix connection start timing
(#29)
- Suppress [Transmission timeout]{.title-ref} error from the sensor
- Support auto reset setting
(#27)
- Support auto reset setting
- Don't send auto reset command if the parameter is not given
- Support vertical interlace added on VSSP2.1 (#25)
- Fix local variable naming style (#26)
- Use timer instead of polling (#23)
- Remove needless semicolons (#22)
- Fix CI bot setting (#24)
- Fix aux data factors. (#18)
- Add a sample launch file to publish frames. (#17)
- Fix socket read buffer size. (#14)
- Add const attribute to constant things. (#16)
- Fix naming style of local variables. (#15)
- Fix coding styles.
(#12)
- fix coding rules
- fix naming styles
- add roslint test
- Fix mag frame_id. (#13)
- Change IMU coordinate frame. (#10)
- Add build test on Travis. (#11)
- Contributors: Atsushi Watanabe
0.1.1 (2016-09-15)
- updates e-mail address of the author
- adds error-message packet handling
- Merge branch 'lgerardSRI-master'
- Install the hokuyo3d executable
- Contributors: Atsushi Watanabe, Leonard Gerard
0.1.0 (2015-04-24)
- direct PointCloud2 message encoding
- adds list of contributors
- adds feature to publish PointCloud2 message "~/hokuyo_cloud" and "~/hokuyo_cloud2" are published on demand. Added pursuant to yukkysaito's request.
- adds parameter to set data output cycle ~output_cycle (string, default: field) Sets output timing to end of frame, field or line. Added pursuant to yukkysaito's request.
- Add invalid range parameter This commit is modified for merging by at-wat. Parameter name invalid_range was changed to range_min.
- fixes a bug in which output data doesn't have all points Fixed pursuant to yukkysaito's report.
- code refactoring
- skips invalid data without 'VSSP' mark
- stops data stream correctly before exit
- scales aux data
- estimates real measurement time from timestamp
- receives aux data and publishes Imu and MagneticField message
- add README.md
- Initial commit
- Contributors: Atsushi Watanabe, yukihiro saito
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| roslint | |
| sensor_msgs | |
| catkin |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2018-03-24 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug (#30)
- Fix connection start timing
(#29)
- Suppress [Transmission timeout]{.title-ref} error from the sensor
- Support auto reset setting
(#27)
- Support auto reset setting
- Don't send auto reset command if the parameter is not given
- Support vertical interlace added on VSSP2.1 (#25)
- Fix local variable naming style (#26)
- Use timer instead of polling (#23)
- Remove needless semicolons (#22)
- Fix CI bot setting (#24)
- Fix aux data factors. (#18)
- Add a sample launch file to publish frames. (#17)
- Fix socket read buffer size. (#14)
- Add const attribute to constant things. (#16)
- Fix naming style of local variables. (#15)
- Fix coding styles.
(#12)
- fix coding rules
- fix naming styles
- add roslint test
- Fix mag frame_id. (#13)
- Change IMU coordinate frame. (#10)
- Add build test on Travis. (#11)
- Contributors: Atsushi Watanabe
0.1.1 (2016-09-15)
- updates e-mail address of the author
- adds error-message packet handling
- Merge branch 'lgerardSRI-master'
- Install the hokuyo3d executable
- Contributors: Atsushi Watanabe, Leonard Gerard
0.1.0 (2015-04-24)
- direct PointCloud2 message encoding
- adds list of contributors
- adds feature to publish PointCloud2 message "~/hokuyo_cloud" and "~/hokuyo_cloud2" are published on demand. Added pursuant to yukkysaito's request.
- adds parameter to set data output cycle ~output_cycle (string, default: field) Sets output timing to end of frame, field or line. Added pursuant to yukkysaito's request.
- Add invalid range parameter This commit is modified for merging by at-wat. Parameter name invalid_range was changed to range_min.
- fixes a bug in which output data doesn't have all points Fixed pursuant to yukkysaito's report.
- code refactoring
- skips invalid data without 'VSSP' mark
- stops data stream correctly before exit
- scales aux data
- estimates real measurement time from timestamp
- receives aux data and publishes Imu and MagneticField message
- add README.md
- Initial commit
- Contributors: Atsushi Watanabe, yukihiro saito
Package Dependencies
| Deps | Name |
|---|---|
| roscpp | |
| rostest | |
| roslint | |
| sensor_msgs | |
| catkin |
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| cirkit_unit03_bringup |
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]
Messages
Services
Plugins
Recent questions tagged hokuyo3d at Robotics Stack Exchange
Package Summary
| Version | 0.2.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/at-wat/hokuyo3d.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2025-07-26 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Atsushi Watanabe
Authors
- Atsushi Watanabe
ROS driver node for HOKUYO 3D LIDARs
[!NOTE]
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
[!NOTE]
After official ROS 1 EOL, this package is released to Alpine ROS.
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.
Changelog for package hokuyo3d
0.2.2 (2025-07-26)
- Remove old CI files (#90)
- Migrate to Alpine ROS 1 (#87)
- Update assets to v0.6.4 (#86)
- Update assets to v0.6.3 (#85)
- Update assets to v0.6.2 (#84)
- Update assets to v0.6.1 (#83)
- Update assets to v0.6.0 (#82)
- Update assets to v0.5.2 (#81)
- Update assets to v0.5.1 (#80)
- Update assets to v0.5.0 (#79)
- Update assets to v0.4.2 (#78)
- Update assets to v0.4.1 (#77)
- Update assets to v0.4.0 (#76)
- Update assets to v0.3.4 (#75)
- Update assets to v0.3.3 (#73)
- Update assets to v0.3.2 (#72)
- Update assets to v0.3.1 (#71)
- Update assets to v0.3.0 (#70)
- Update assets to v0.2.0 (#69)
- Update assets to v0.1.5 (#66)
- Update assets to v0.1.4 (#65)
- Update dockerignore (#64)
- Update assets to v0.1.3 (#63)
- Update assets to v0.1.2 (#62)
- Migrate to GitHub Actions (#60)
- Update assets to v0.0.10 (#59)
- Update assets to v0.0.9 (#57)
- Update CI scripts (#58)
- Bump cmake minimum version to 3.0.2 (#55)
- Contributors: Atsushi Watanabe
0.2.1 (2020-04-07)
- Fix bot comment on prerelease test (#52)
- Update CI scripts (#49)
- Support Boost 1.69 (#48)
- Update pointer align style (#47)
- Update assets to v0.0.8 (#46)
- Update assets to v0.0.7 (#45)
- Update assets to v0.0.6 (#44)
- Ignore gh-pr-comment failure (#42)
- Fix CI bot (#41)
- Fix travis build branch (#40)
- Contributors: Atsushi Watanabe
0.2.0 (2018-03-24)
- Fix timestamp estimation
(#35)
- Fix timestamp estimation
- Decrease timstamp base lpf
- Drop timestamp jump back
- Add median filter to the timestamp estimation
- Add debug output of estimated timestamp epoch
- Add parameter to allow timstamp jump back (default: false)
- Install launch files (#32)
- Fix horizontal table precision bug
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| roslint | |
| roscpp | |
| sensor_msgs |
System Dependencies
Dependant Packages
Launch files
- launch/hokuyo3d_frames.launch
-
- basename [default: hokuyo3d]