
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache License, Version 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nasa/astrobee.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-07-03 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Astrobee Flight Software
Authors
- Astrobee Flight Software
\page graphoptimizer Graph Optimizer
Package Overview
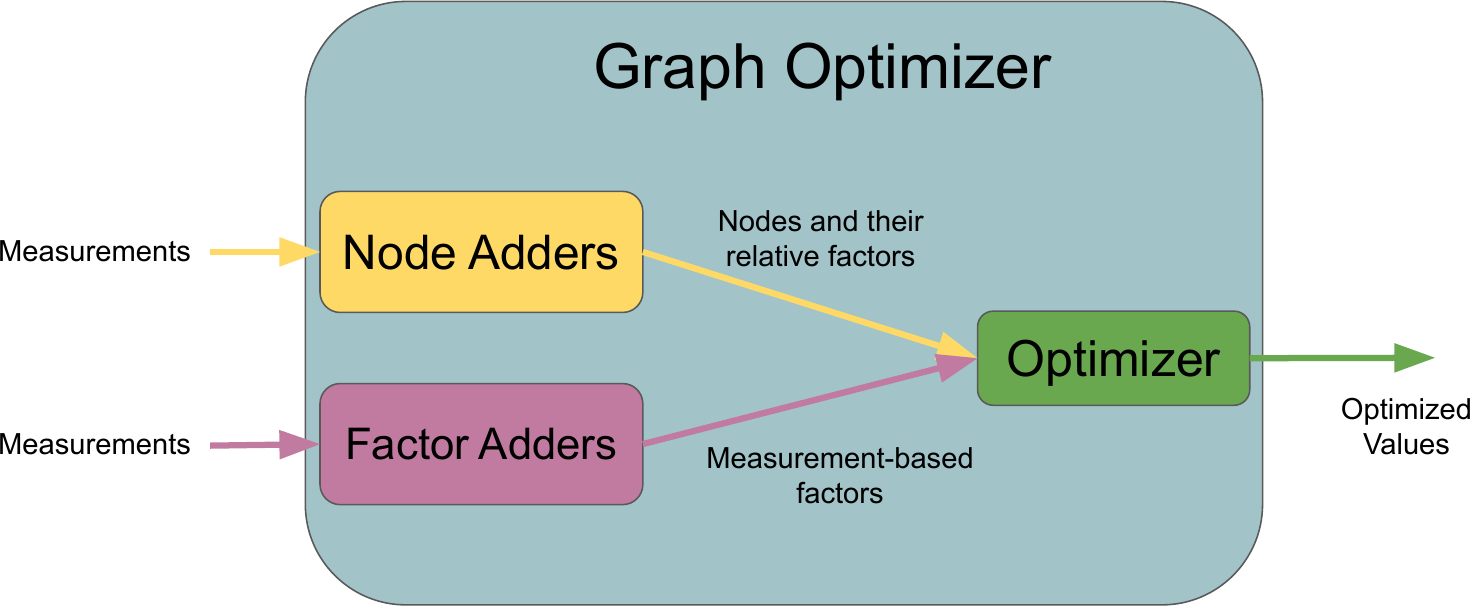
The graph optimizer contains factor and node adders and uses these to generate factors and nodes for optimization. During an optimize call, it queries each factor adder and adds new factors and nodes to an internal factor graph before calling the respective optimizer. See the factor_adder and node_adder packages for more information on each of these classes.
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged graph_optimizer at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.0.0 |
| License | Apache License, Version 2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nasa/astrobee.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-07-03 |
| Dev Status | UNMAINTAINED |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Astrobee Flight Software
Authors
- Astrobee Flight Software
\page graphoptimizer Graph Optimizer
Package Overview
The graph optimizer contains factor and node adders and uses these to generate factors and nodes for optimization. During an optimize call, it queries each factor adder and adds new factors and nodes to an internal factor graph before calling the respective optimizer. See the factor_adder and node_adder packages for more information on each of these classes.