
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
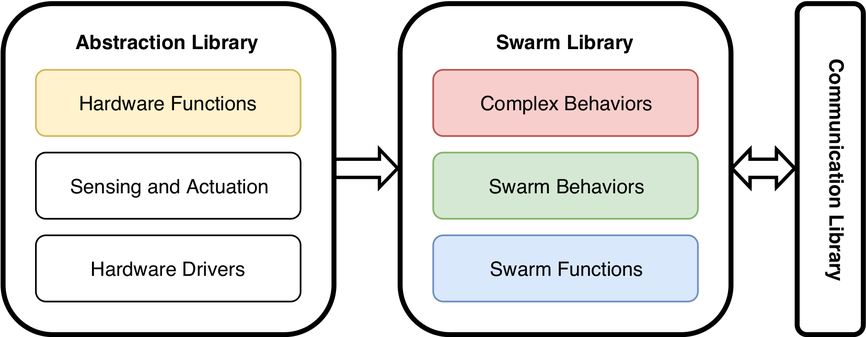
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
 This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/cpswarm/swarm_behaviors.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-02-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| swarm_behaviors_position | 1.3.0 |
| swarm_behaviors_velocity | 1.3.0 |
| swarm_behaviors | 1.3.0 |
| uav_local_coverage | 1.3.0 |
| uav_optimal_coverage | 1.3.0 |
| uav_random_direction | 1.3.0 |
| uav_simple_tracking | 1.3.0 |
| ugv_random_walk | 1.3.0 |
README
Swarm Behaviors Library
The swarm behaviors library contains implementations of swarm algorithms. It is part of the swarm library.
Getting Started
The behavior library is based on the latest ROS long-term support release ROS Kinetic Kame. Newer versions may also work.
To run swarm behaviors of this library, the swarm functions library and the abstraction library are required. The abstraction library consists of three sub-libraries:
- hardware functions
- sensing and actuation
- hardware drivers
The communication between CPSs is based on the CPSwarm Communication Library.
Furthermore, the cpswarm_msgs are required by most packages in this library.
For detailed usage instructions, please refer to the individual ROS packages in this repository.
Contributing
Contributions are welcome.
Please fork, make your changes, and submit a pull request. For major changes, please open an issue first and discuss it with the other authors.
Affiliation
This work is supported by the European Commission through the CPSwarm H2020 project under grant no. 731946.