
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview 
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
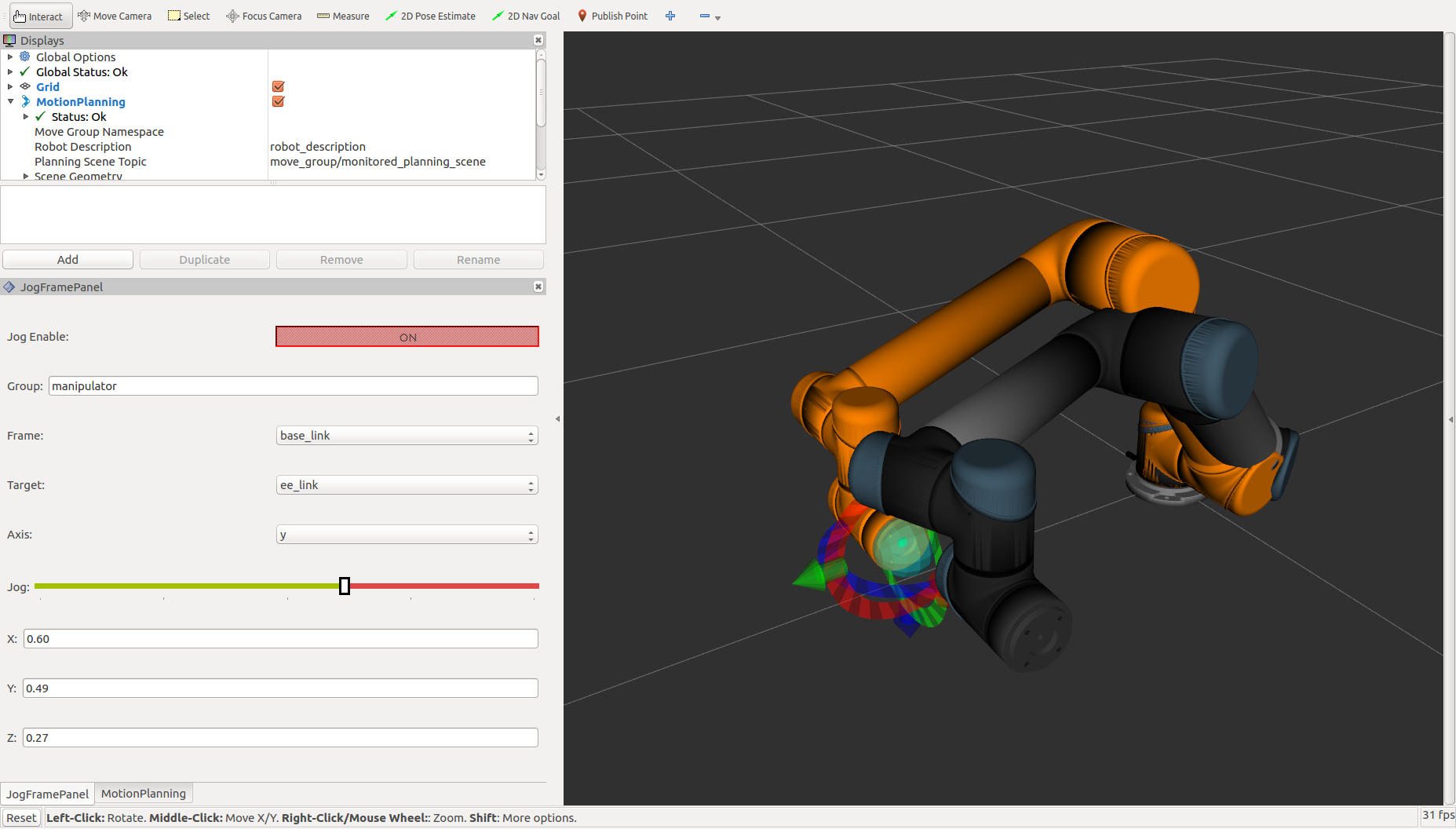
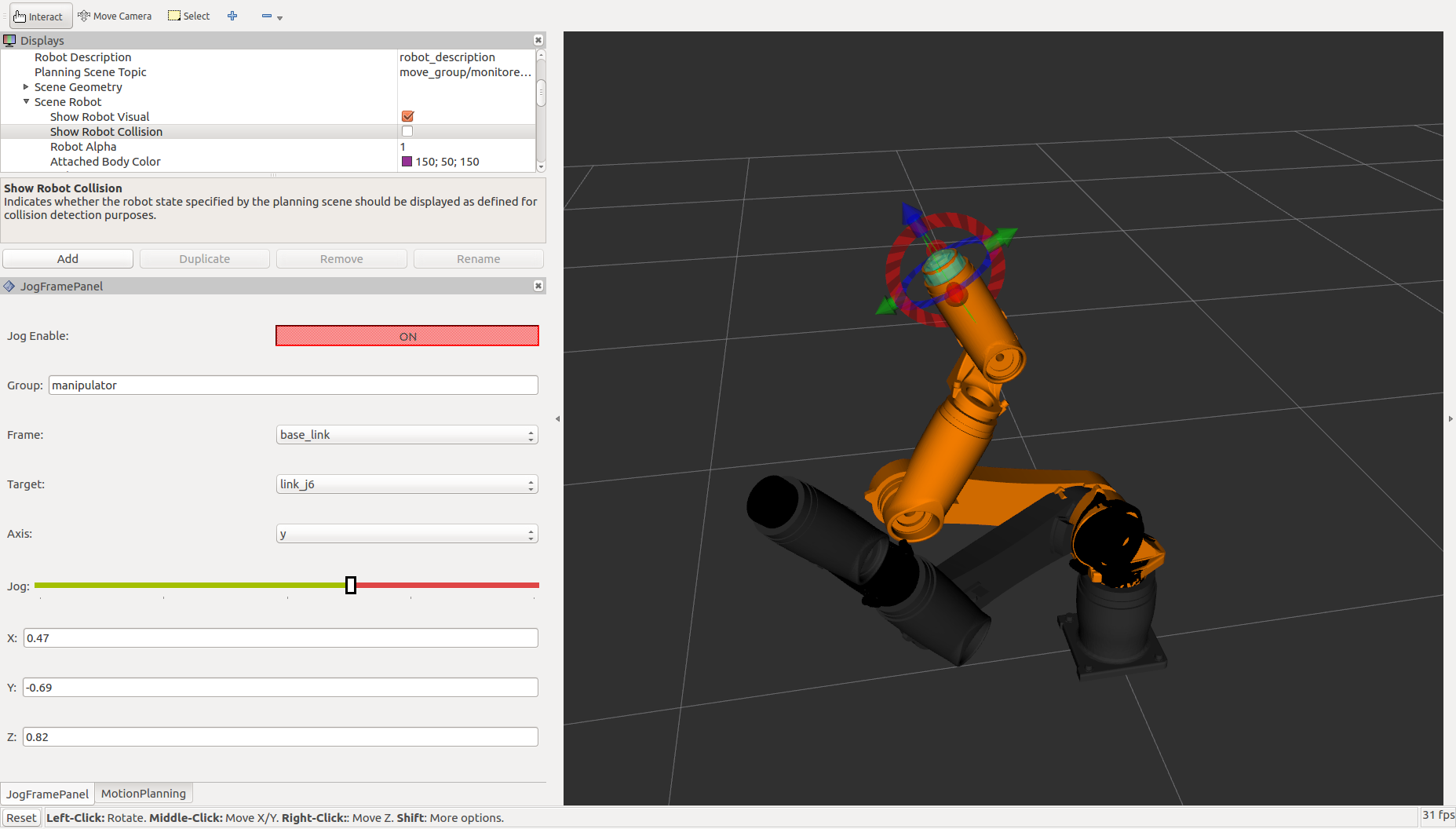
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/tork-a/jog_control.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2020-05-16 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| jog_control | 0.0.2 |
| jog_controller | 0.0.2 |
| jog_launch | 0.0.2 |
| jog_msgs | 0.0.2 |
README
Overview
ROS and MoveIt! are very powerful tools for industrial manipulators. Many people use ROS packages to control their own industrial manipulators. You can see many manipulators are available on ROS-Industrial project.
However, ROS has several missing features for industrial usage. The one is “jogging”. Jogging is to make the actual robot move by small amount of distance. We can repeat jogging to adjust the robot to teach target position and posture.
Most commercial industrial robots have their own jog control in the teaching pendants. Some ROS oriented robot has no teaching pendant and no jog control, so it can be a big barrier to use ROS for industrial usage.
This jog_control repositry has packages for jog control
(reasonably). You can jog your robot by rviz jog panel, joypads,
keyboards, and teaching pendants using these packages.
Quick start
You can see the idea of jog_control package by demo in jog_launch
package. It uses simulation and MoveIt!. Some robots are from
ROS-Industrial repositry, which
you need to build from source code.
How to install
Install from binary (in the future)
This package is not released yet. When it is released, you can install by apt command.
$ apt install ros-kinetic-jog-control
Install from source
$ source /opt/ros/kinetic/setup.bash
$ mkdir -p ws/src
$ cd ws
$ wstool init src
$ wstool set -t src jog_control --git http://github.com/tork-a/jog_control
$ wstool update -t src
$ rosdep install -r --from-path src --ignore-src
$ catkin build
$ source devel/setup.bash
UR3 and UR5(Gazebo and MoveIt!)
Launch simulation and MoveIt! (Replace ur5 to ur3 if you need)
$ roslaunch ur_gazebo ur5_joint_limited.launch
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
And launch jog nodes.
$ roslaunch jog_launch ur5.launch
UR5(fake_joint)
You can use fake_joint package to use the perfect joint
controller. Just launch:
$ roslaunch jog_launch ur5.launch use_fake_joint:=true use_moveit:=true use_rviz:=true
TRA1 (Simulation mode)
Launch simulation and MoveIt!
$ roslaunch tra1_bringup tra1_bringup.launch simulation:=true
$ roslaunch tra1_bringup tra1_moveit.launch
And launch jog nodes.
$ roslaunch jog_launch tra1.launch
TRA1 (fake_joint)
File truncated at 100 lines see the full file