
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
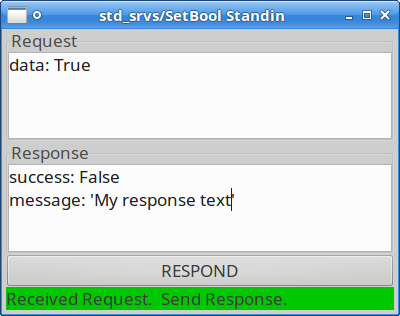
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rx_service_tools at Robotics Stack Exchange
|
|
rx_service_tools package from rx_service_tools reporx_service_tools |
ROS Distro
|
Package Summary
| Version | 1.0.2 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/nobleo/rx_service_tools.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2022-03-15 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Tim Clephas
Authors
- Alireza Hosseini
- Felix Widmaier
Synapticon rx_service_tools
This package provides a simple GUI to run an interactive service server.
It is based on the axserver.py of actionlib and works exactly the same, just
for services instead of actions.
Usage example:
rosrun rx_service_tools rx_service_server /service_name std_srvs/SetBool
Changelog for package rx_service_tools
1.0.2 (2021-01-27)
- Noetic migration using roscompile
1.0.1 (2021-01-14)
- Roslaunch compatible by allowing unkown arguments (#1) Only parse known arguments as roslaunch tends to add arguments like __name:= and __log:=
- feat: Interactive service server GUI Based on the actionlib/axserver.py. Works exactly the same but for services instead of actions.
- Contributors: Felix Widmaier, Tim Clephas