
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
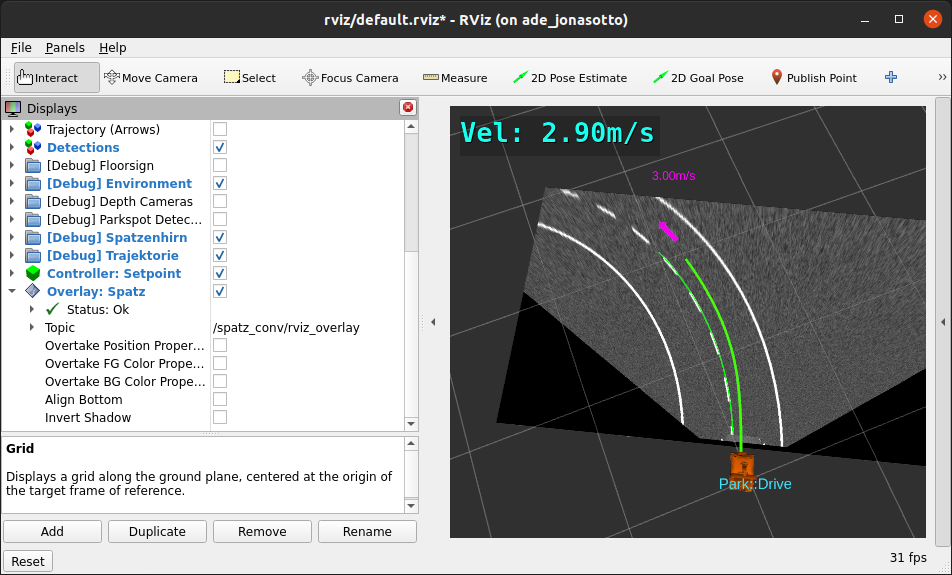
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay

The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler
Launch files
Messages
Services
Plugins
Recent questions tagged rviz_2d_overlay_plugins at Robotics Stack Exchange
|
|
rviz_2d_overlay_plugins package from rviz_2d_overlay_plugins reporviz_2d_overlay_msgs rviz_2d_overlay_plugins |
ROS Distro
|
Package Summary
| Version | 1.4.1 |
| License | BSD-3-Clause |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Team Spatzenhirn
- Jonas Otto
- Dominik Authaler
Authors
rviz_2d_overlay_plugins
Plugin for displaying 2D overlays over the RViz2 3D scene.
Based on the jsk_visualization package, which is currently only released for ROS1, under the 3-Clause BSD license.
Text Overlay
Both the text itself and formatting options for the text overlay are specified in the OverlayText.msg message type .
Alignment and Positioning
To allow easy positioning of the overlay along the edges of the rviz window, and to support multiple/dynamic window
sizes, the position is given by offsets from the respective border.
Depending on whether the horizontal_alignment is LEFT, RIGHT or CENTER,
the horizontal_distance field sets the distance to the left or right border, or the offset from center.
For LEFT and RIGHT alignment, a distance of zero means that the text is aligned to the border without any gap,
a positive distance moves the overlay towards the center.
For CENTER alignment, a distance of zero means completely centered, positive values move the overlay towards the
bottom right of the window.
TOP and BOTTOM for the vertical alignment work just like LEFT and RIGHT in the horizontal case.
Using a string topic
A simple coverter node (rviz2d_from_string_node) is provided which can covert std_msgs/msg/String to rviz_2d_overlay_msgs/msg/OverlayText. The working principle is simple, it subscribes to a String topic, publishes the content as an OverlayText and the other proeries can be set from ROS parameters or by overtaking it in RViz2.
A launch file which runs this node and sets the parameters may look something like:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='rviz_2d_overlay_plugins',
executable='string_to_overlay_text',
name='string_to_overlay_text_1',
output='screen',
parameters=[
{"string_topic": "chatter"},
{"fg_color": "b"}, # colors can be: r,g,b,w,k,p,y (red,green,blue,white,black,pink,yellow)
],
),
])
In case a /chatter topic is needed this can be published with a single command:
ros2 topic pub /chatter std_msgs/String "data: Hello world"
Circular Gauge Overlay
The PieChartDisplay is a rather boring pie chart, as it only displays a single value.
PieChartDisplay and “Circular Gauge” are used synonymously in this package.
The gauge allows displaying a
std_msgs/Float32.
Formatting and positioning, as well as setting the maximum value is only possible in the display options inside rviz.
Changelog for package rviz_2d_overlay_plugins
1.4.1 (2026-03-14)
- added missing QRegularExpression include for jazzy #25
- removed unused headers_to_moc var #25
- enable automoc #25
- Contributors: Henning Klatt
1.4.0 (2025-11-11)
- Match include directory structure with ROS standards ([#23](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/23))
- Contributors: Ryohsuke Mitsudome
1.3.1 (2025-06-01)
- Replace ament_target_dependencies with target_link_libraries ([#22](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/22))
- use less custom package docs with sphinx instead of doxygen ([#19](https://github.com/teamspatzenhirn/rviz_2d_overlay_plugins/issues/19))
- Contributors: Alejandro Hernandez Cordero, Jonas Otto
1.3.0 (2023-05-18)
- Added string to overlay text converter node
- fix QT build warnings
- Contributors: Ernő Horváth, Jonas Otto, szepilot
1.2.1 (2022-09-30)
- Add package documentation using doxygen
- add rosdoc2 config
- add readme at package level
- Contributors: Jonas Otto, Dominik Authaler
1.2.0 (2022-09-27)
- Add missing dependencies to package.xml
- Fix various compiler-warnings (NFC)
- Rename package from overlay_rviz_plugins to rviz_2d_overlay_plugins
- Contributors: Jonas Otto
1.1.0 (2022-09-11)
- implemented reset
- port pie chart plugin to ROS2
- Contributors: Dominik, Jonas Otto
1.0.0 (2022-08-30)
- port to ros2
- add overlay plugin sources from jsk_visualization
- Contributors: Jonas Otto, Dominik Authaler