
|
rplidar_ros package from rplidar_ros reporplidar_ros |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.1.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Hunter L. Allen
Authors
- Slamtec ROS Maintainer
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
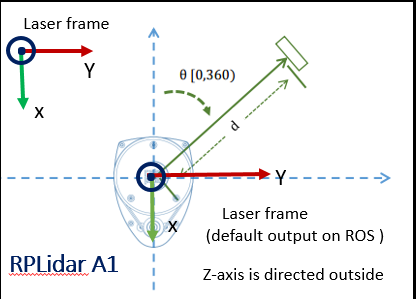
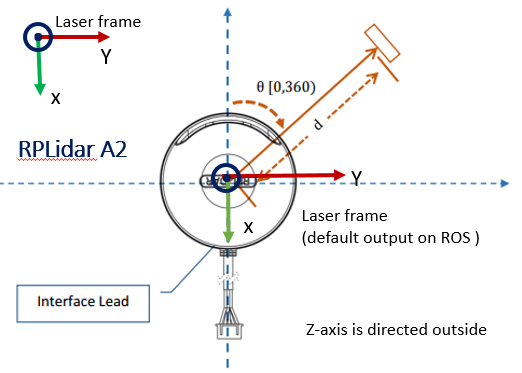
Frame Orientation
Changelog for package rplidar_ros
1.10.0 (2019-02-22) ------------------* Update RPLIDAR SDK to 1.10.0 * [new feature] support Rplidar S1 * Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
- Update SDK to Version 0.12.0
(#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
- Update ROS 2 parameters and use node's clock instance
(#9)
- Update ROS 2 parameters and use node's clock instance
- Fix scan_mode listing output
- Stop motors and exit when set_scan_mode() call fails
- Fix compilation with eloquent (#6)
- Use Composition node with launch files (#4)
- Composable nodes
(#3)
- Begin implementation of composable rplidar_ros::rplidar_node
- Declare composition node library in CMake, as well as continue the port
- Get to a compiling state
- Add start/stop motor callbacks + more driver setup
- Add publish loop for scans
- Add composition node
- Lint
- Port rviz and launch files to ROS2
(#2)
- Port non-rviz launch files to ROS2
- Compatibility with rviz2
- revert whitespace changes
- Port the remaining launch files to ROS2
- Revert more whitespace changes
- Fix luanch and rviz install path indent level
- Ros2 port (#1)
ROS 2 port
- Port CMakeLists.txt
- Port package.xml
- Port client.cpp
* Port node.cpp Fix compilation
- Support TCP
- upgrade sdk 1.10.0
- upgrade sdk 1.9.0 [new feature] support baudrate 57600 and 1382400, support HQ scan response [bugfix] TCP channel doesn't work [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- [bugfix]modify scan_mode at test_rplidar.launch and test_rplidar_a3.launch
- Contributors: Dan Rose, Hunter L. Allen, WubinXia, kint
1.7.0 (2018-07-19)
- Update RPLIDAR SDK to 1.7.0
- support scan points farther than 16.38m
- upport display and set scan mode
- Contributors: kint
1.6.0 (2018-05-21)
- Release 1.6.0.
- Update RPLIDAR SDK to 1.6.0
- Support new product RPLIDAR A3(default 16K model and max_distance 25m)
- Contributors: kint
1.5.7 (2016-12-15)
- Release 1.5.7.
- Update RPLIDAR SDK to 1.5.7
- Fixed the motor default speed at 10 HZ. Extend the measurement of max_distance from 6m to 8m.
- Contributors: kint
1.5.5 (2016-08-23)
- Release 1.5.5.
- Update RPLIDAR SDK to 1.5.5
- Add RPLIDAR information print, and fix the standard motor speed of RPLIDAR A2.
- Contributors: kint
1.5.4 (2016-06-02)
- Release 1.5.4.
- Update RPLIDAR SDK to 1.5.4
- Support RPLIDAR A2
- Contributors: kint
1.5.2 (2016-04-29)
- Release 1.5.2.
- Update RPLIDAR SDK to 1.5.2
- Support RPLIDAR A2
- Contributors: kint
1.0.1 (2014-06-03)
- Release 1.0.1.
- Add angle compensate mechanism to compatible with ROS scan message
- Add RPLIDAR sdk to the repo.
- First release of RPLIDAR ROS package (1.0.0)
- Initial commit
- Contributors: Ling, RoboPeak Public Repos
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.1.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Hunter L. Allen
Authors
- Slamtec ROS Maintainer
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
Changelog for package rplidar_ros
1.10.0 (2019-02-22) ------------------* Update RPLIDAR SDK to 1.10.0 * [new feature] support Rplidar S1 * Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
- Update SDK to Version 0.12.0
(#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
- Update ROS 2 parameters and use node's clock instance
(#9)
- Update ROS 2 parameters and use node's clock instance
- Fix scan_mode listing output
- Stop motors and exit when set_scan_mode() call fails
- Fix compilation with eloquent (#6)
- Use Composition node with launch files (#4)
- Composable nodes
(#3)
- Begin implementation of composable rplidar_ros::rplidar_node
- Declare composition node library in CMake, as well as continue the port
- Get to a compiling state
- Add start/stop motor callbacks + more driver setup
- Add publish loop for scans
- Add composition node
- Lint
- Port rviz and launch files to ROS2
(#2)
- Port non-rviz launch files to ROS2
- Compatibility with rviz2
- revert whitespace changes
- Port the remaining launch files to ROS2
- Revert more whitespace changes
- Fix luanch and rviz install path indent level
- Ros2 port (#1)
ROS 2 port
- Port CMakeLists.txt
- Port package.xml
- Port client.cpp
* Port node.cpp Fix compilation
- Support TCP
- upgrade sdk 1.10.0
- upgrade sdk 1.9.0 [new feature] support baudrate 57600 and 1382400, support HQ scan response [bugfix] TCP channel doesn't work [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- [bugfix]modify scan_mode at test_rplidar.launch and test_rplidar_a3.launch
- Contributors: Dan Rose, Hunter L. Allen, WubinXia, kint
1.7.0 (2018-07-19)
- Update RPLIDAR SDK to 1.7.0
- support scan points farther than 16.38m
- upport display and set scan mode
- Contributors: kint
1.6.0 (2018-05-21)
- Release 1.6.0.
- Update RPLIDAR SDK to 1.6.0
- Support new product RPLIDAR A3(default 16K model and max_distance 25m)
- Contributors: kint
1.5.7 (2016-12-15)
- Release 1.5.7.
- Update RPLIDAR SDK to 1.5.7
- Fixed the motor default speed at 10 HZ. Extend the measurement of max_distance from 6m to 8m.
- Contributors: kint
1.5.5 (2016-08-23)
- Release 1.5.5.
- Update RPLIDAR SDK to 1.5.5
- Add RPLIDAR information print, and fix the standard motor speed of RPLIDAR A2.
- Contributors: kint
1.5.4 (2016-06-02)
- Release 1.5.4.
- Update RPLIDAR SDK to 1.5.4
- Support RPLIDAR A2
- Contributors: kint
1.5.2 (2016-04-29)
- Release 1.5.2.
- Update RPLIDAR SDK to 1.5.2
- Support RPLIDAR A2
- Contributors: kint
1.0.1 (2014-06-03)
- Release 1.0.1.
- Add angle compensate mechanism to compatible with ROS scan message
- Add RPLIDAR sdk to the repo.
- First release of RPLIDAR ROS package (1.0.0)
- Initial commit
- Contributors: Ling, RoboPeak Public Repos
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.1.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Hunter L. Allen
Authors
- Slamtec ROS Maintainer
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
Changelog for package rplidar_ros
1.10.0 (2019-02-22) ------------------* Update RPLIDAR SDK to 1.10.0 * [new feature] support Rplidar S1 * Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
- Update SDK to Version 0.12.0
(#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
- Update ROS 2 parameters and use node's clock instance
(#9)
- Update ROS 2 parameters and use node's clock instance
- Fix scan_mode listing output
- Stop motors and exit when set_scan_mode() call fails
- Fix compilation with eloquent (#6)
- Use Composition node with launch files (#4)
- Composable nodes
(#3)
- Begin implementation of composable rplidar_ros::rplidar_node
- Declare composition node library in CMake, as well as continue the port
- Get to a compiling state
- Add start/stop motor callbacks + more driver setup
- Add publish loop for scans
- Add composition node
- Lint
- Port rviz and launch files to ROS2
(#2)
- Port non-rviz launch files to ROS2
- Compatibility with rviz2
- revert whitespace changes
- Port the remaining launch files to ROS2
- Revert more whitespace changes
- Fix luanch and rviz install path indent level
- Ros2 port (#1)
ROS 2 port
- Port CMakeLists.txt
- Port package.xml
- Port client.cpp
* Port node.cpp Fix compilation
- Support TCP
- upgrade sdk 1.10.0
- upgrade sdk 1.9.0 [new feature] support baudrate 57600 and 1382400, support HQ scan response [bugfix] TCP channel doesn't work [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- [bugfix]modify scan_mode at test_rplidar.launch and test_rplidar_a3.launch
- Contributors: Dan Rose, Hunter L. Allen, WubinXia, kint
1.7.0 (2018-07-19)
- Update RPLIDAR SDK to 1.7.0
- support scan points farther than 16.38m
- upport display and set scan mode
- Contributors: kint
1.6.0 (2018-05-21)
- Release 1.6.0.
- Update RPLIDAR SDK to 1.6.0
- Support new product RPLIDAR A3(default 16K model and max_distance 25m)
- Contributors: kint
1.5.7 (2016-12-15)
- Release 1.5.7.
- Update RPLIDAR SDK to 1.5.7
- Fixed the motor default speed at 10 HZ. Extend the measurement of max_distance from 6m to 8m.
- Contributors: kint
1.5.5 (2016-08-23)
- Release 1.5.5.
- Update RPLIDAR SDK to 1.5.5
- Add RPLIDAR information print, and fix the standard motor speed of RPLIDAR A2.
- Contributors: kint
1.5.4 (2016-06-02)
- Release 1.5.4.
- Update RPLIDAR SDK to 1.5.4
- Support RPLIDAR A2
- Contributors: kint
1.5.2 (2016-04-29)
- Release 1.5.2.
- Update RPLIDAR SDK to 1.5.2
- Support RPLIDAR A2
- Contributors: kint
1.0.1 (2014-06-03)
- Release 1.0.1.
- Add angle compensate mechanism to compatible with ROS scan message
- Add RPLIDAR sdk to the repo.
- First release of RPLIDAR ROS package (1.0.0)
- Initial commit
- Contributors: Ling, RoboPeak Public Repos
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| turtlebot4_bringup |
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.1.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Hunter L. Allen
Authors
- Slamtec ROS Maintainer
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
Changelog for package rplidar_ros
1.10.0 (2019-02-22) ------------------* Update RPLIDAR SDK to 1.10.0 * [new feature] support Rplidar S1 * Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
- Update SDK to Version 0.12.0
(#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
- Update ROS 2 parameters and use node's clock instance
(#9)
- Update ROS 2 parameters and use node's clock instance
- Fix scan_mode listing output
- Stop motors and exit when set_scan_mode() call fails
- Fix compilation with eloquent (#6)
- Use Composition node with launch files (#4)
- Composable nodes
(#3)
- Begin implementation of composable rplidar_ros::rplidar_node
- Declare composition node library in CMake, as well as continue the port
- Get to a compiling state
- Add start/stop motor callbacks + more driver setup
- Add publish loop for scans
- Add composition node
- Lint
- Port rviz and launch files to ROS2
(#2)
- Port non-rviz launch files to ROS2
- Compatibility with rviz2
- revert whitespace changes
- Port the remaining launch files to ROS2
- Revert more whitespace changes
- Fix luanch and rviz install path indent level
- Ros2 port (#1)
ROS 2 port
- Port CMakeLists.txt
- Port package.xml
- Port client.cpp
* Port node.cpp Fix compilation
- Support TCP
- upgrade sdk 1.10.0
- upgrade sdk 1.9.0 [new feature] support baudrate 57600 and 1382400, support HQ scan response [bugfix] TCP channel doesn't work [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- [bugfix]modify scan_mode at test_rplidar.launch and test_rplidar_a3.launch
- Contributors: Dan Rose, Hunter L. Allen, WubinXia, kint
1.7.0 (2018-07-19)
- Update RPLIDAR SDK to 1.7.0
- support scan points farther than 16.38m
- upport display and set scan mode
- Contributors: kint
1.6.0 (2018-05-21)
- Release 1.6.0.
- Update RPLIDAR SDK to 1.6.0
- Support new product RPLIDAR A3(default 16K model and max_distance 25m)
- Contributors: kint
1.5.7 (2016-12-15)
- Release 1.5.7.
- Update RPLIDAR SDK to 1.5.7
- Fixed the motor default speed at 10 HZ. Extend the measurement of max_distance from 6m to 8m.
- Contributors: kint
1.5.5 (2016-08-23)
- Release 1.5.5.
- Update RPLIDAR SDK to 1.5.5
- Add RPLIDAR information print, and fix the standard motor speed of RPLIDAR A2.
- Contributors: kint
1.5.4 (2016-06-02)
- Release 1.5.4.
- Update RPLIDAR SDK to 1.5.4
- Support RPLIDAR A2
- Contributors: kint
1.5.2 (2016-04-29)
- Release 1.5.2.
- Update RPLIDAR SDK to 1.5.2
- Support RPLIDAR A2
- Contributors: kint
1.0.1 (2014-06-03)
- Release 1.0.1.
- Add angle compensate mechanism to compatible with ROS scan message
- Add RPLIDAR sdk to the repo.
- First release of RPLIDAR ROS package (1.0.0)
- Initial commit
- Contributors: Ling, RoboPeak Public Repos
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| raspimouse_navigation | |
| raspimouse_slam |
Launch files
Messages
Services
Plugins
Recent questions tagged rplidar_ros at Robotics Stack Exchange
|
|
rplidar_ros package from rplidar_ros reporplidar_ros |
|
|
Package Summary
| Tags | No category tags. |
| Version | 2.1.0 |
| License | BSD |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Hunter L. Allen
Authors
- Slamtec ROS Maintainer
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
Changelog for package rplidar_ros
1.10.0 (2019-02-22) ------------------* Update RPLIDAR SDK to 1.10.0 * [new feature] support Rplidar S1 * Contributors: tony,WubinXia
1.9.0 (2018-08-24)
- Update RPLIDAR SDK to 1.9.0
- [new feature] support baudrate 57600 and 1382400, support HQ scan response
- [bugfix] TCP channel doesn't work
- [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- Contributors: tony,kint
2.1.0 (2022-09-06)
- Add auto standby mode
(#29)
* Add auto standby mode Turn on/off motor based on topic subsribers
- Set auto_standby off by default
- Fix building on Apple machines (#30)
- Update README & fix launch files for Foxy and up
(#26)
* Update README.md based on modifications from youngday
- Update launch files for Foxy or later
- Contributors: Jesse Zhang, Vasily Kiniv
2.0.3 (2022-09-01)
- Fix build with later versions of GCC
- Contributors: Hunter L. Allen
2.0.2 (2021-05-27)
- Remove test_rplidar.launch.py, since relevant executables no longer exist (#24)
- Contributors: Hunter L. Allen
2.0.1 (2020-09-13)
- Remove old driver
(#21)
- Remove old rplidar driver in favor of the component version
- Lint the source
- Fix incompatibilities with slam_toolbox
(#20)
- Fix incompatibilities with slam_toolbox:
- Fix angle compensate mode to publish angle compensated values
- Fix angle_increment calculation
- Add optional flip_x_axis option to deal with issue discussed here: https://github.com/SteveMacenski/slam_toolbox/issues/198. Flip x-axis can be used when laser is mounted with motor behind it as rotated TF laser frame doesn't seem to work with slam_toolbox.
- Fix whitespace
- Fix node count for component implementation (#19)
- Slam Toolbox compatibility (#18) (cherry picked from commit f21079fea8eca8946b5b4ae72f50b8d9f1ac46a2)
- Fix building with GCC 10 (#17)
- Contributors: Christen Lofland, Hunter L. Allen, justinIRBT
2.0.0 (2020-07-15)
- Update SDK to Version 0.12.0
(#14)
- Register the rclcpp component
- Update RPLIDAR SDK to version 1.12.0
- Update ROS 2 parameters and use node's clock instance
(#9)
- Update ROS 2 parameters and use node's clock instance
- Fix scan_mode listing output
- Stop motors and exit when set_scan_mode() call fails
- Fix compilation with eloquent (#6)
- Use Composition node with launch files (#4)
- Composable nodes
(#3)
- Begin implementation of composable rplidar_ros::rplidar_node
- Declare composition node library in CMake, as well as continue the port
- Get to a compiling state
- Add start/stop motor callbacks + more driver setup
- Add publish loop for scans
- Add composition node
- Lint
- Port rviz and launch files to ROS2
(#2)
- Port non-rviz launch files to ROS2
- Compatibility with rviz2
- revert whitespace changes
- Port the remaining launch files to ROS2
- Revert more whitespace changes
- Fix luanch and rviz install path indent level
- Ros2 port (#1)
ROS 2 port
- Port CMakeLists.txt
- Port package.xml
- Port client.cpp
* Port node.cpp Fix compilation
- Support TCP
- upgrade sdk 1.10.0
- upgrade sdk 1.9.0 [new feature] support baudrate 57600 and 1382400, support HQ scan response [bugfix] TCP channel doesn't work [improvement] Print warning messages when deprecated APIs are called; imporve angular accuracy for ultra capsuled scan points
- [bugfix]modify scan_mode at test_rplidar.launch and test_rplidar_a3.launch
- Contributors: Dan Rose, Hunter L. Allen, WubinXia, kint
1.7.0 (2018-07-19)
- Update RPLIDAR SDK to 1.7.0
- support scan points farther than 16.38m
- upport display and set scan mode
- Contributors: kint
1.6.0 (2018-05-21)
- Release 1.6.0.
- Update RPLIDAR SDK to 1.6.0
- Support new product RPLIDAR A3(default 16K model and max_distance 25m)
- Contributors: kint
1.5.7 (2016-12-15)
- Release 1.5.7.
- Update RPLIDAR SDK to 1.5.7
- Fixed the motor default speed at 10 HZ. Extend the measurement of max_distance from 6m to 8m.
- Contributors: kint
1.5.5 (2016-08-23)
- Release 1.5.5.
- Update RPLIDAR SDK to 1.5.5
- Add RPLIDAR information print, and fix the standard motor speed of RPLIDAR A2.
- Contributors: kint
1.5.4 (2016-06-02)
- Release 1.5.4.
- Update RPLIDAR SDK to 1.5.4
- Support RPLIDAR A2
- Contributors: kint
1.5.2 (2016-04-29)
- Release 1.5.2.
- Update RPLIDAR SDK to 1.5.2
- Support RPLIDAR A2
- Contributors: kint
1.0.1 (2014-06-03)
- Release 1.0.1.
- Add angle compensate mechanism to compatible with ROS scan message
- Add RPLIDAR sdk to the repo.
- First release of RPLIDAR ROS package (1.0.0)
- Initial commit
- Contributors: Ling, RoboPeak Public Repos