No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.

|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| CI status | Continuous Integration : 0 / 0 |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Debug tool to check tf timestamp, etc.
Additional Links
No additional links.
Maintainers
- Ryo Koyama
Authors
No additional authors.
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
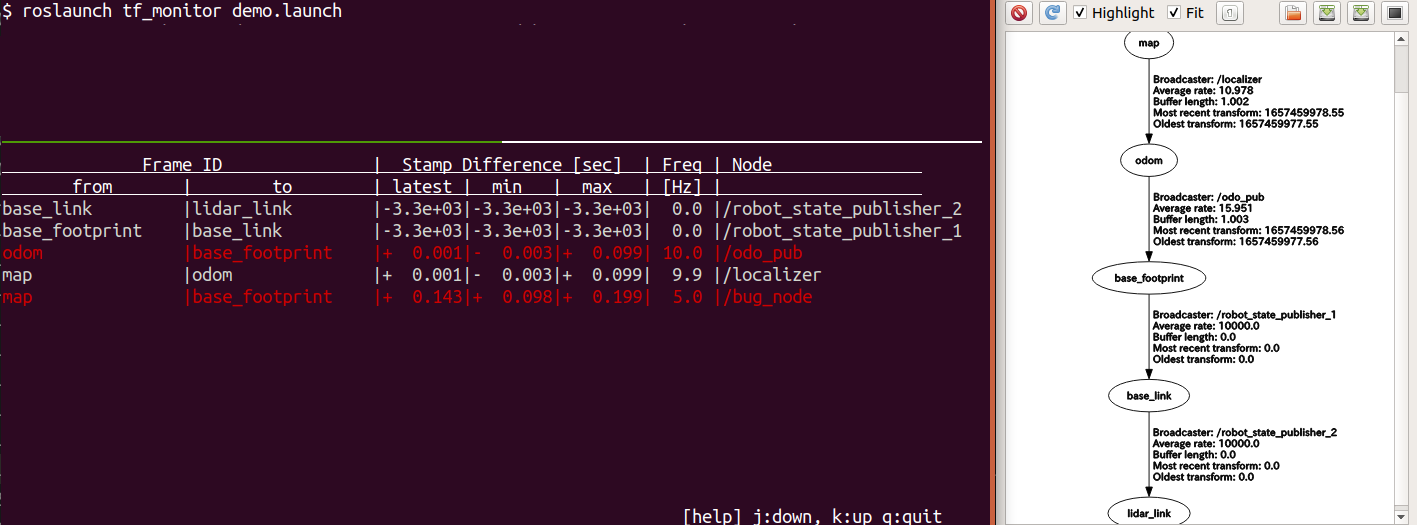
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
CHANGELOG
No CHANGELOG found.
Wiki Tutorials
This package does not provide any links to tutorials in it's rosindex metadata.
You can check on the ROS Wiki Tutorials page for the package.
Launch files
Messages
No message files found.
Services
No service files found
Plugins
No plugins found.
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
No version for distro ardent. Known supported distros are highlighted in the buttons above.
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
No version for distro crystal. Known supported distros are highlighted in the buttons above.
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
No version for distro dashing. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro foxy. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro lunar. Known supported distros are highlighted in the buttons above.
No version for distro jade. Known supported distros are highlighted in the buttons above.
No version for distro indigo. Known supported distros are highlighted in the buttons above.
No version for distro hydro. Known supported distros are highlighted in the buttons above.
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.