
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
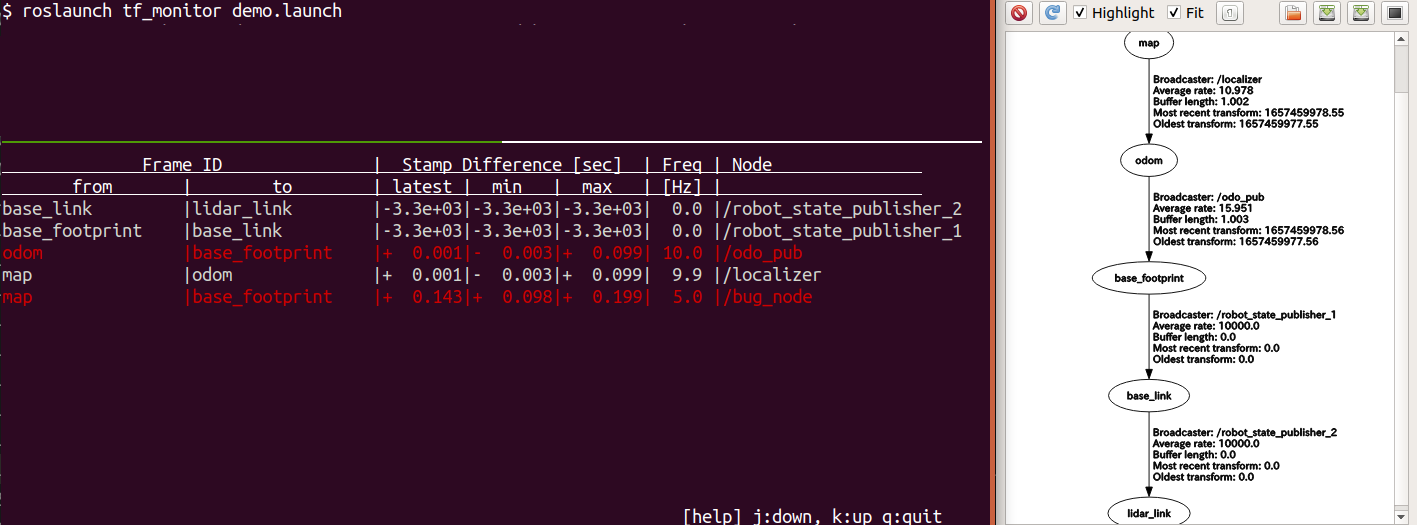
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT
Launch files
Messages
Services
Plugins
Recent questions tagged rocky_tf_monitor at Robotics Stack Exchange
|
|
rocky_tf_monitor package from rocky_tf_monitor reporocky_tf_monitor |
ROS Distro
|
Package Summary
| Version | 0.0.1 |
| License | MIT |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/rkoyama1623/rocky_tf_monitor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2023-11-11 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Ryo Koyama
Authors
rocky_tf_monitor
What is this?
This is a debug tool to monitor ROS tf topic. geometry2 is an ausome library to handle geometric transformations with time stamp, and tf and tf2 is a core library of geometry2.
When utilizing tf/tf2, the following points should be noted.
- tf tree can have only one root frame.
- Too old timestamp or timestamp in the future sometimes causes a defect of your robot system.
This ROS package provides a means of checking to see if any of the above problems are occurring.
Demo
roslaunch rocky_tf_monitor demo.launch
rosrun rocky_tf_monitor rocky_tf_monitor
In this demo, invalid /tf topic is demonstrated. Although node /odom_pub publish base_footprint coordinate frame in odom coordinate frame, bug_node also publish base_footprint coordinate frame in map coordinate frame. rqt_tf_tree cannot deal with these kind of problem. By rocky_tf_monitor we can confirm base_footprint has two parent frame, which is indicated by red line.
How to build
cd /path/to/catkin_ws/src
git clone https://github.com/rkoyama1623/rocky_tf_monitor.git
rosdep install --from-path rocky_tf_monitor -iry
cd rocky_tf_monitor
catkin build --this
How to use
rosrun rocky_tf_monitor rocky_tf_monitor
License
MIT