
|
monkeywrench package from monkeywrench repomonkeywrench |
|
|
Package Summary
| Tags | No category tags. |
| Version | 0.1.0 |
| License | Apache2.0 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/cst0/ros-monkeywrench.git |
| VCS Type | git |
| VCS Version | noetic_devel |
| Last Updated | 2022-06-03 |
| Dev Status | DEVELOPED |
| CI status | Continuous Integration : 0 / 0 |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- cst0 (Chris Thierauf)
Authors
ros-monkeywrench
ROS tooling for intentionally disrupting communications and functionality to build more resilient robot software systems.
Background
To ensure resilient robot systems, it is necessary to be able to push them to their limits and evaluate what takes place at these limits. This package currently provides tooling for the former and aims to provide tooling for the latter in the not-too-distant future.
To ‘push to their limits’, we can take advantage of the fact that ROS messages are structured collections of data. Failure cases can therefore be reduced to manipulations of this data: data not getting to where it’s supposed to be, not getting there fast enough, data being wrong, etc.
This is the purpose of the monkeywrench node: it subscribes to the specified topic, and immediately publishes anything it receives. This node also provides a service, which can be called to trigger various failure cases: when data is received, it is modified before publishing. These modifications might be to replace data with random noise, to alter the timestamp in a header, to stop publishing entirely, and more. In this way, the flow of data can be altered.
However, manually inserting this node into every pipeline of interest may be prohibitively time consuming when attemping to test your stack. Instead, the monkeylaunch utility is provided. This utility wraps roslaunch, except monkeylaunch also takes a configuration file which specifies the nodes and topics to intercept. In this way, existing roslaunch-based stacks can be very quickly spun up for testing.
Usage
A demo launch file is provided as testlaunch.launch. Running it with
roslaunch monkeywrench testlaunch.launch, the following graph is produced:
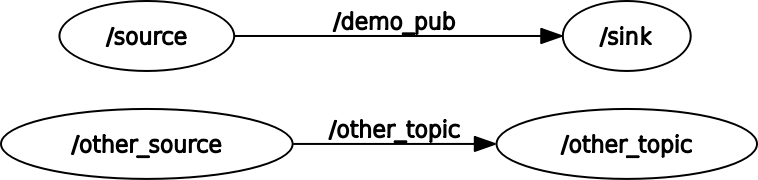
A config file is provided as ./config/testconfig.txt. It contains the
following:
source:demo_pub
other_source:other_topic
wonk:third_topic
This config file is of the format “node name:topic”. Each line is a different monkeywrench node which will be launched. Note that there is an additional node:topic pair here which does not correspond to anything in the graph, which will be ignored.
When you have installed this package, you will have a new executable called
monkeylaunch. It wraps roslaunch and takes the same arguments, except it
expects the final argument to be a path to a config of the form demonstrated
above.
You can see this by running the same launchfile as above, except now using monkeylaunch and providing a config file:
monkeylaunch monkeywrench testlaunch.launch testconfig.txt
Make sure you specify a valid path to your config. This produces a new graph:

Note that this is the identical flow of information, except there are now two auto-generated monkeywrench nodes inserted in between the previous sources and sinks. Using this, that flow of information can be interrupted.
Changelog for package monkeywrench
0.1.0 (2022-05-20)
- Initial code release, demo
- Update documentation
- Create LICENSE
0.0.1 (2022-04-11)
- Init repository
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| message_generation | |
| rospy | |
| catkin |