
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
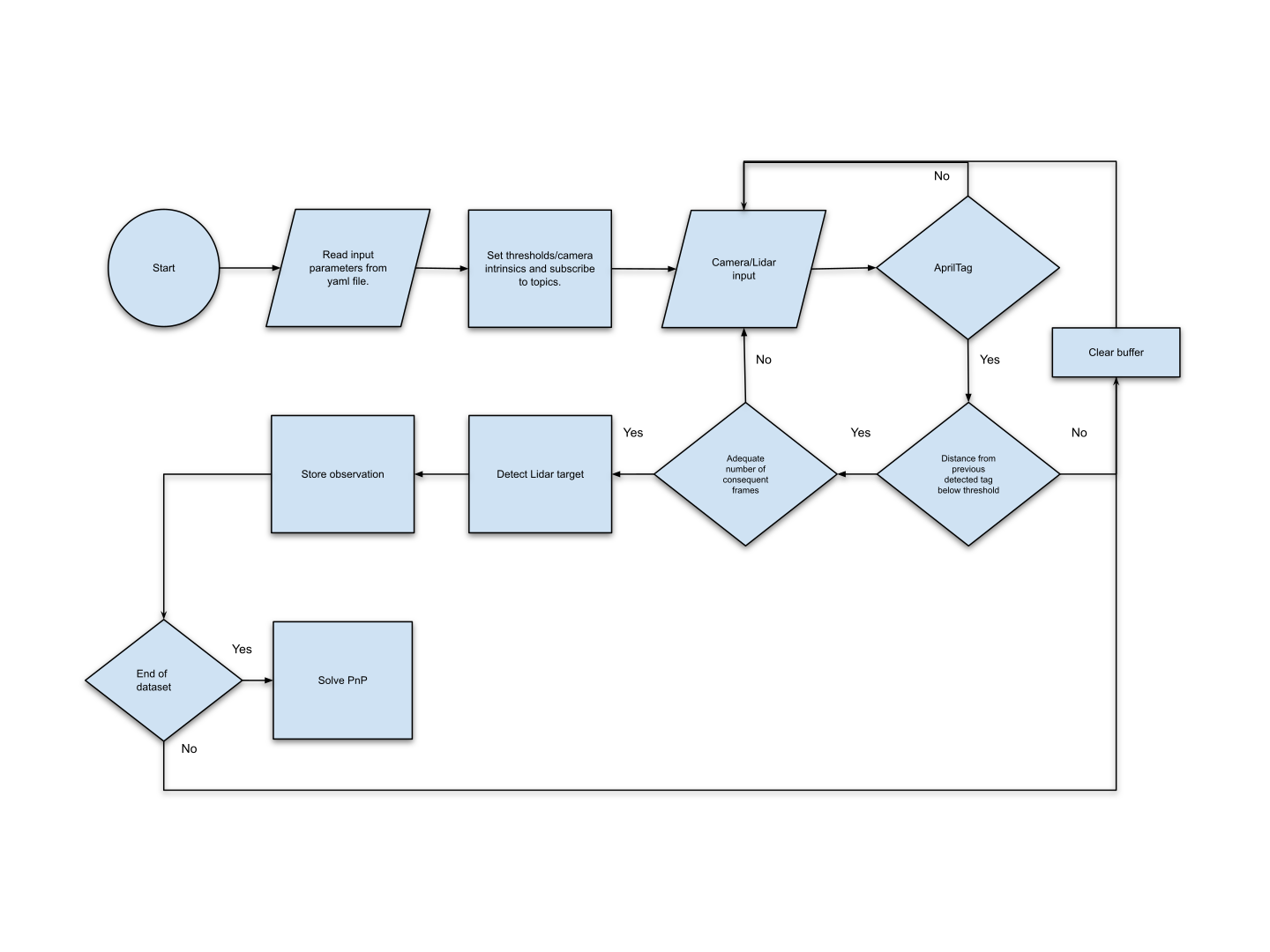
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |
System Dependencies
Dependant Packages
Messages
Services
Plugins
Recent questions tagged cam2lidar at Robotics Stack Exchange
Package Summary
| Version | 1.0.0 |
| License | Apache 2 |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/up2metric/cam2lidar.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2024-10-08 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Anastasis Papanagnou
Authors
Lidar - Camera Calibration
Wiki
You can visit the ros wiki with more information regarding the calibration package.
An Effective Camera-to-Lidar Spatiotemporal Calibration Based on a Simple Calibration Target [pdf]
Run through Docker
- Clone the repository.
- Execute (inside the folder):
docker build .
- Run the image (with X11 support):
docker run --gpus all -it --privileged -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Inside the container:
cd /root/catkin_ws
ln -sf /cam2lidar/ src/
catkin_make
source devel/setup.bash
Notes: To enable the GUI do not forget to run this on a local terminal.
xhost +
Also, use this docker run command to share the same roscore between the docker container and the host.
docker run --gpus all -it --privileged --net=host -e DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix -v <repository location>:/cam2lidar <image number>
Prepare data for calibration
There are two topics that are necessary for the calibration process. One for video and one for Lidar. In addition, you will need the intrinsic parameters of the camera. Then set the input topics at the launch file that you will execute.
Geometric calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar geometric.launch
and set the following parameters in the config folder.
# Geometric calibration
reproj_error: 8
intensity_thres: 200
distance_from_prev: 100
horizontal_dimension: 3840
vertical_dimension: 2160
grid_horizontal_division: 5
grid_vertical_division: 5
reproj_error: Reprojection error of PnP
intensity_thres: Lidar intensity threshold that is considered to be coming from the reflective tape
distance_from_prev: Distance (in px) from previous apriltag in order for the movement to be considered as static
horizontal_dimension/vertical_dimension: Dimensions of the image
grid_horizontal_division/grid_vertical_division: Shape of grid, in order to have one measurement per rectangle
Temporal calibration
Run the bagfile (or publish the necessary topics), execute:
roslaunch cam2lidar temporal.launch
and set the parameters as mentioned in the Geometric calibration section.
Example
The repository was recently (04/2024) tested using Velodyne VLP16 and RealSense D435i.
The Velodyne Lidar can be installed inside the running container using the official guide. The RealSense camera can be used after following the instructions for installing ROS Wrapper.
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| cv_bridge | |
| rospy | |
| message_generation | |
| catkin | |
| message_runtime |