
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
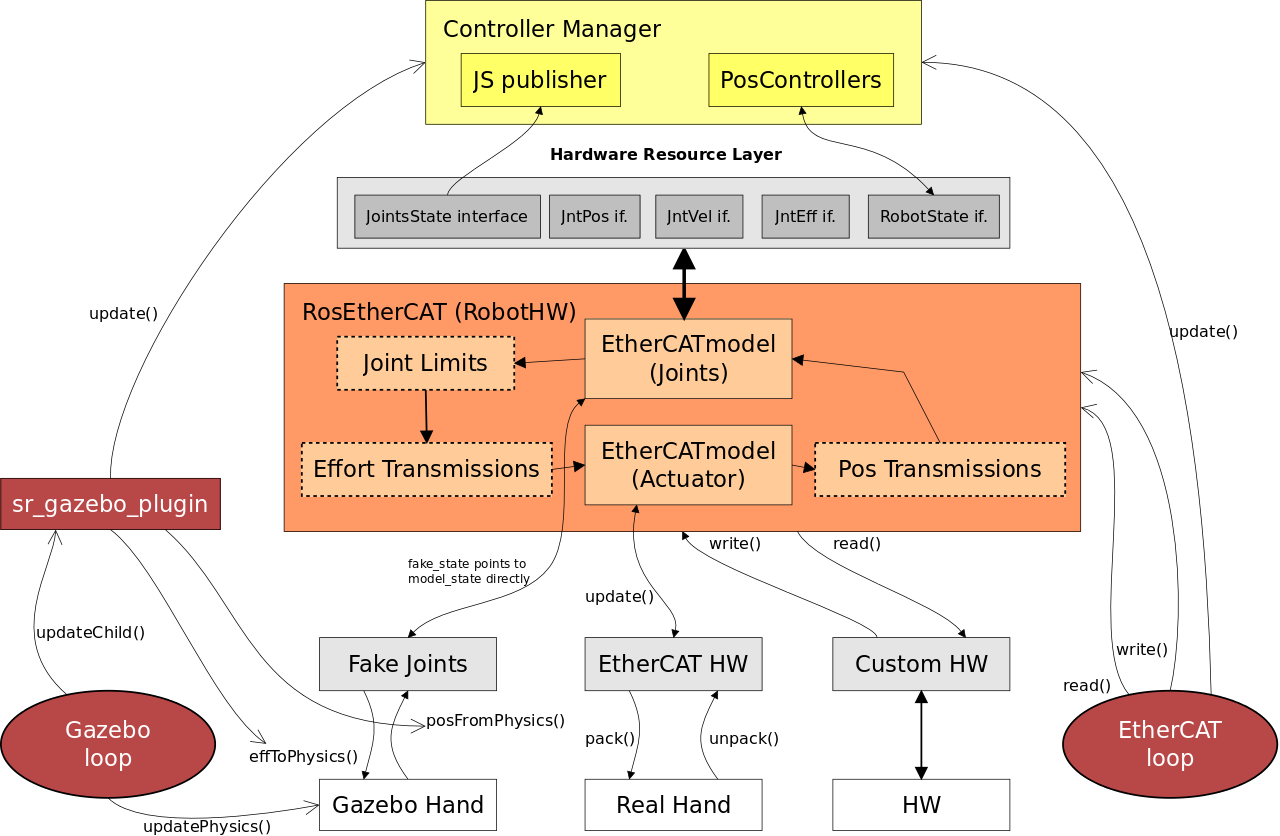
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-08-11 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.1.8 |
| ros_ethercat_eml | 0.1.8 |
| ros_ethercat_hardware | 0.1.8 |
| ros_ethercat_loop | 0.1.8 |
| ros_ethercat_model | 0.1.8 |
README
ros_ethercat
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used EtherCAT for communication to hardware. Most likely, such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing EtherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
Compatibility
The following modifications are required in software with previous pr2 dependencies that is switched to this package.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time)
-
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/>
mechanism_statistics are now published by the ros_ethercat_model package. -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are defined in urdf files and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ros_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ros_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant
CONTRIBUTING
|
|
ros_ethercat repositoryros_ethercat ros_ethercat_eml ros_ethercat_hardware ros_ethercat_loop ros_ethercat_model |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/shadow-robot/ros_ethercat.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-07-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| ros_ethercat | 0.3.0 |
| ros_ethercat_eml | 0.3.0 |
| ros_ethercat_hardware | 0.3.0 |
| ros_ethercat_loop | 0.3.0 |
| ros_ethercat_model | 0.3.0 |
README
ros_ethercat
Overview
This is a reimplementation of the main loop of pr2_ethercat without dependencies on PR2 software. It was mainly developed to be used by Shadow Robot Company. It may be useful to anyone people that has developed ROS software for their own robot and used etherCAT for communication. Most likely such software would be based on the software for Willow Garage’s PR2. ros_ethercat reuses existing etherCAT drivers (eml package) and instantiates a ros_control controller manager. Part of the software in this repository comes from repositories pr2_mechanism, pr2_robot, pr2_ethercat_drivers. The parts specific to the pr2 robot only have been removed. Therefore, the same license (BSD) has been used.
pr2 packages no longer required
- ethercat_hardware
- pr2_bringup
- pr2_ethercat
- pr2_mechanism
- pr2_controller_interface
- pr2_controller_manager
- pr2_hardware_interface
- pr2_mechanism_diagnostics
- pr2_mechanism_model
You can find the architecture diagram below for a closer look at how this works.
Compatibility
In software with previous pr2 dependencies that is switched to this package, the following modifications are required.
Controllers
-
#include <controller_interface/controller.h>
instead of#include <pr2_controller_interface/controller.h> -
class MyController : public controller_interface::Controller<ros_ethercat_mechanism_model::RobotState>
instead ofclass MyController : public pr2_controller_interface::Controller - Controller’s update function should be declared as
virtual void update(const ros::Time&, const ros::Duration&)
and starting function as
virtual void starting(const ros::Time& time),br. -
controller_managerandcontroller_interfaceshould be used as dependencies inCMakeLists.txtandpackage.xmlfiles instead ofpr2_controller_managerandpr2_controller_interfacerespectively. - In
package.xmlfile in export tag use<controller_interface plugin="${prefix}/controller_plugins.xml"/> - In
controller_plugins.xmlfile usebase_class_type="controller_interface::ControllerBase" />
launch files
- Replace
pr2_ethercatwithros_ethercat_loopin launch files - Since pr2_controller_manager is no longer used, joint_states or mechanism_statistics are no longer published by it. Joint states are now published with the join_state_controller from ros_controllers. To start this controller this line need to be added in the main launch file
<include file="$(find ros_ethercat_model)/launch/joint_state_publisher.launch"/> -
calibrate.pyfile from pr2_bringup is now included in ros_ethercat_model package and renamed to justcalibrateaccording to ROS convention. Launch files that executecalibrate.pyshould be modified to find it there.
transmissions
Transmissions are still defined in urdf in the pr2 style and inherit from ros_ethercat_model::Transmission. This class will initialize the actuators associated with this transmission.
New features
- ros_ethercat accepts a new argument
--periodwhich is the period of main ethercat loop in msec. If not given the default value is 1ms. - There is a helper bash script called ethercat_grant. This will grant to the ros_ethercat_loop executable the ability to be ran from a normal user without root privileges. E.g. of use
rosrun ros_ethercat_loop ethercat_grant