
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
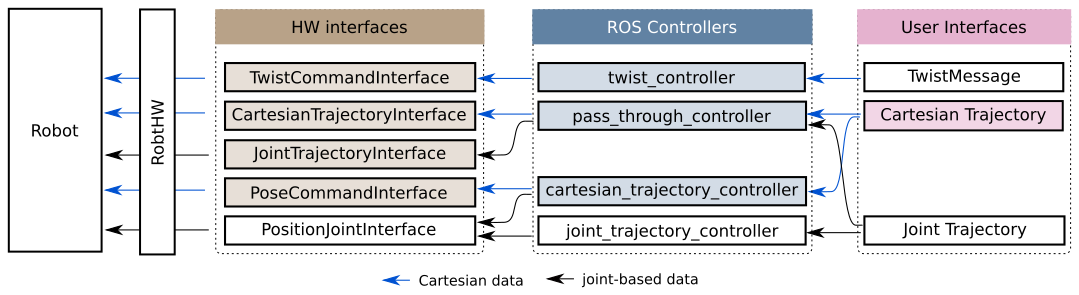
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.
CONTRIBUTING
|
|
ros_controllers_cartesian repositorycartesian_interface cartesian_trajectory_controller cartesian_trajectory_interpolation ros_controllers_cartesian twist_controller |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-06-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| cartesian_interface | 0.1.7 |
| cartesian_trajectory_controller | 0.1.7 |
| cartesian_trajectory_interpolation | 0.1.7 |
| ros_controllers_cartesian | 0.1.7 |
| twist_controller | 0.1.7 |
README
Cartesian ROS Controllers
This package brings mechanisms for Cartesian control to the ROS-control framework.
Overview
New functionality (colored):
Rationale
As opposed to joint-based control, Cartesian control is often more intuitive for programmers to specify how a tool (robot end-effector) should move in their application. For instance, gluing, grinding, polishing and all sorts of other surface-related tasks benefit from a straight-forward task formulation with Cartesian coordinates.
Currently, there is no support of Cartesian control in ROS. Yet, the number of OEMs, whose drivers support Cartesian control interfaces is growing. This set of packages aims at filling this gap and get you started with Cartesian control.
Major features at a glance
-
Add Cartesian functionality to ROS control. This brings new interfaces for controller design, such as a
PoseCommandInterface, aTwistCommandInterface, and a new Cartesian trajectory definition. Example controllers include aTwistControllerand aCartesianTrajectoryController. -
Enable Cartesian trajectory control in your applications. Specify your task comfortably with waypoints in task space. ROS-side interpolation and streaming of setpoints over the new interfaces is only one of several alternatives. See the
cartesian_control_msgspackage for details about the interface definition. -
Use (conventional) ROS control for Cartesian trajectory execution. You don’t need to change anything in the driver’s HW-abstraction of your specific robot if that supports current ROS control. The
position_controllers/CartesianTrajectoryControllercontroller uses an IK solver to generate joint commands from the Cartesian trajectory during runtime. Thus, existing joint command interfaces (which should be present in most ROS-Control-enabled robot drivers) are sufficient for using this controller. -
Hand-over control to the robot by forwarding trajectories. Two new interfaces
CartesianTrajectoryInterfaceandJointTrajectoryInterfacelet robots take care of driver-side interpolation to achieve best performance. This functionality lives in a separate repository. -
Speed-scale trajectory execution. All trajectory executions (both Cartesian and joint-based) can be speed-scaled within 0 to 100% at runtime. This gives you flexibility in setting-up new applications and during test runs. Changing this continuously even lets you reshape trajectory execution without re-teaching. This functionality lives in a separate repository but is used for controllers in this repository.
Robots Overview
In the spirit of ROS control, the implementation is robot-agnostic and shall support applications on a wide range of robots. The table below shows what features will be available with this enhancement. Robot drivers with a hardware interface adapted specifically for those new features will support more features than existing ones without modifications.
| Feature | Robot drivers with adapted HW interface | Robots with current ROS control |
|---|---|---|
| Cartesian trajectory control using joint-commands | ✓ | ✓ |
| Cartesian trajectory control using Cartesian commands | ✓ | |
| Cartesian trajectory forwarding | ✓ | |
| Joint trajectory forwarding | ✓ | |
| Speed-scale trajectories | ✓ |
Acknowledgement
Developed in collaboration between:
![]() and
and
![]() .
.
![]()
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. More information: rosin-project.eu
![]()
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement no. 732287.