
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
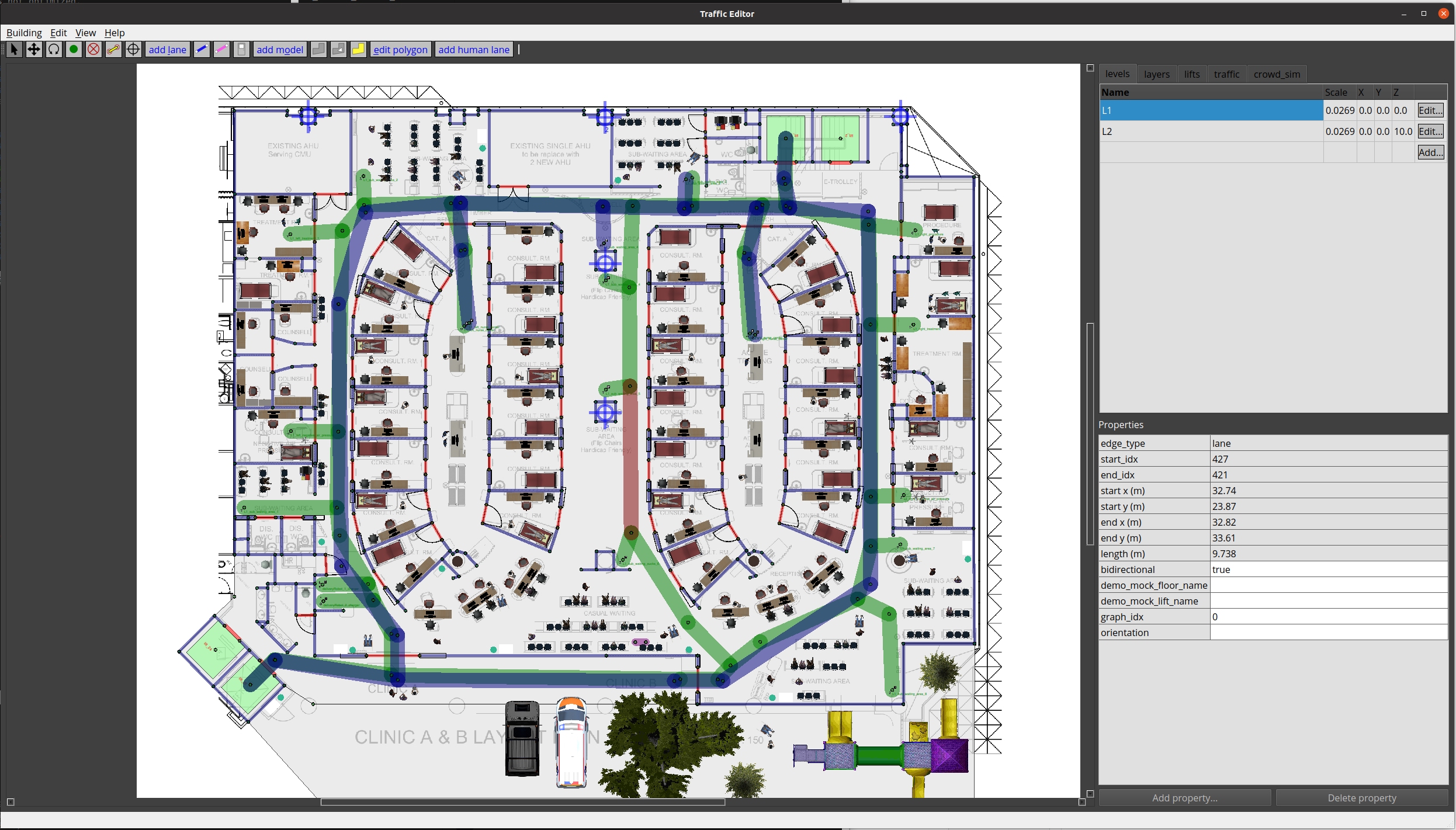
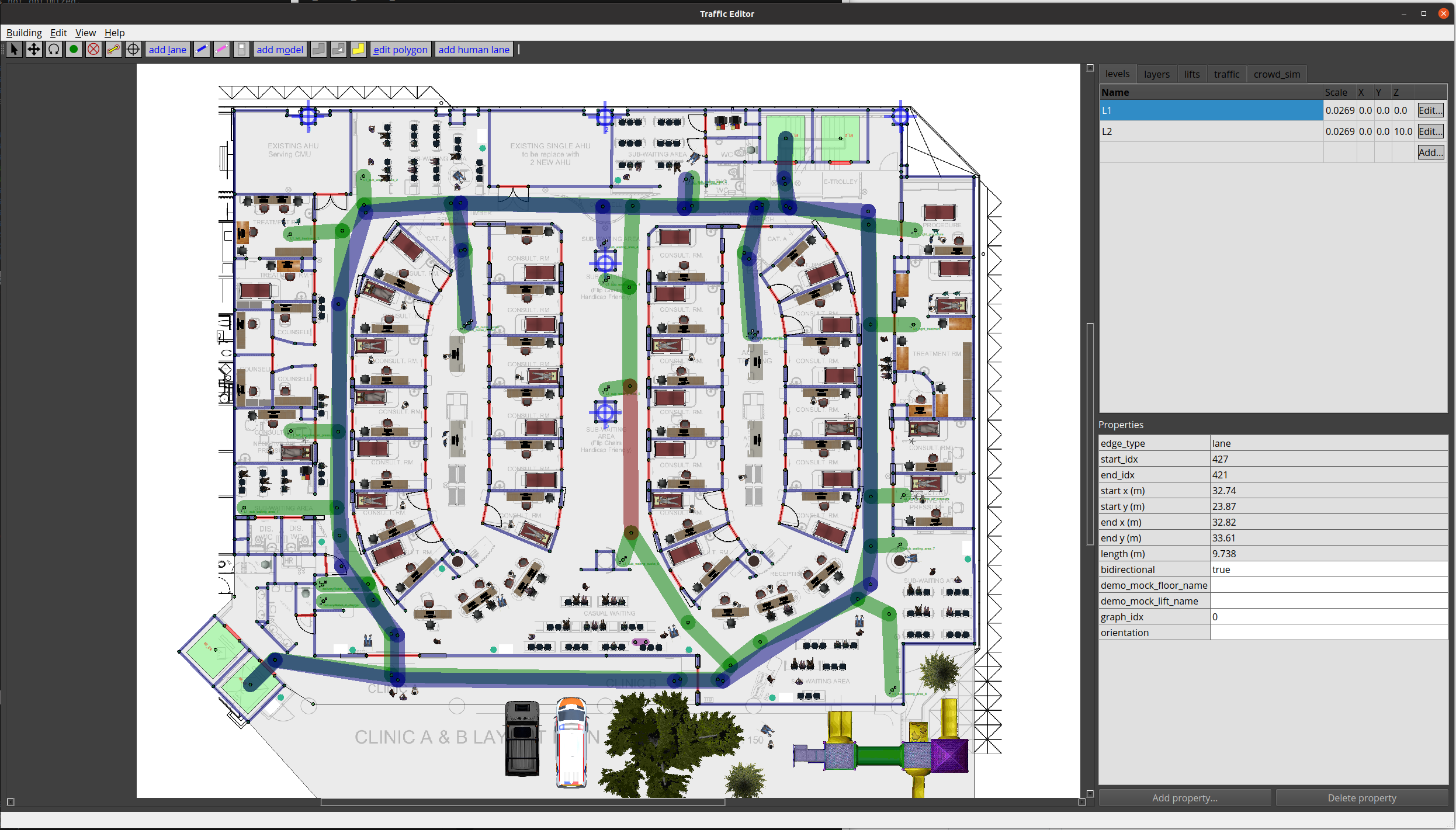
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
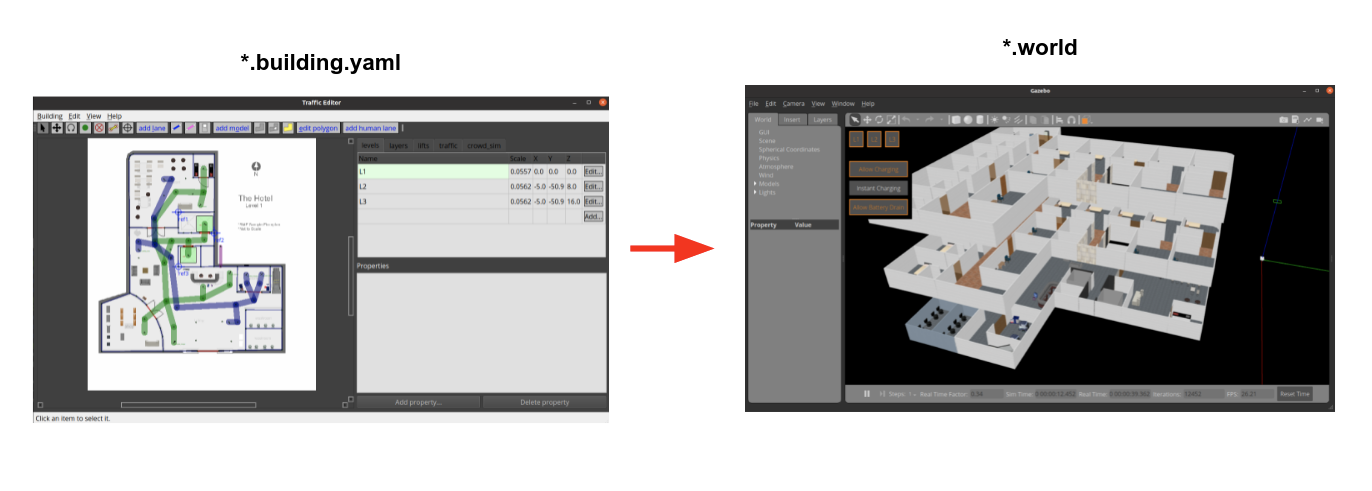
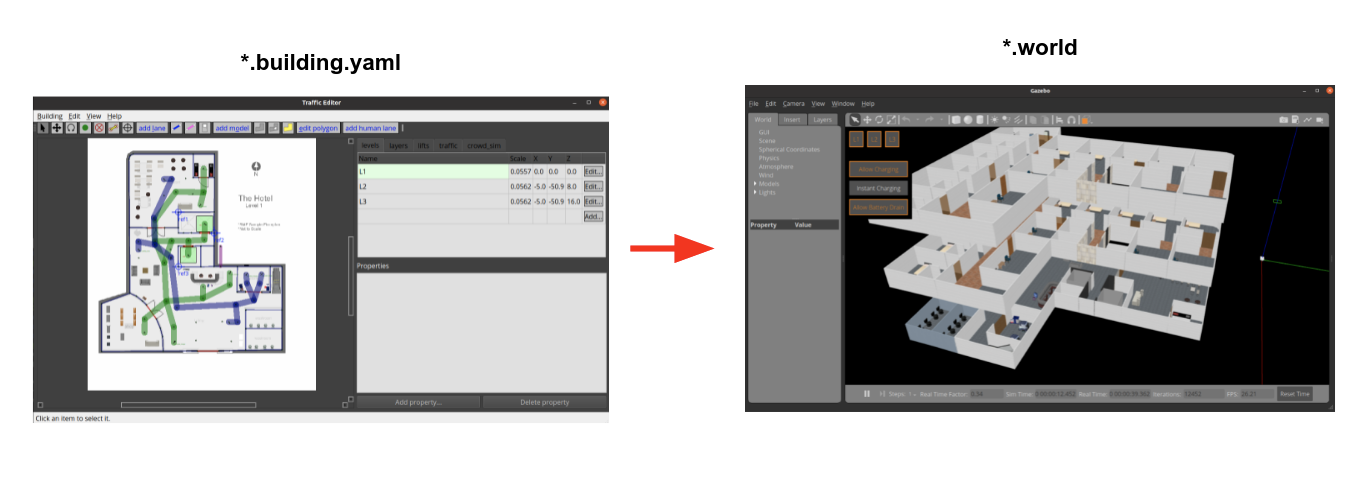
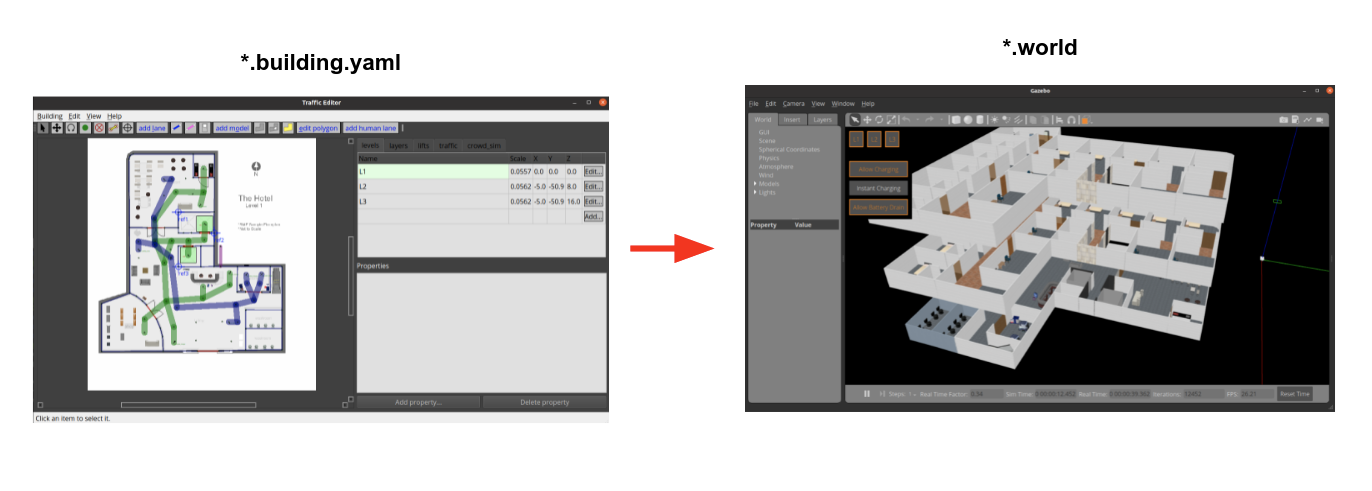
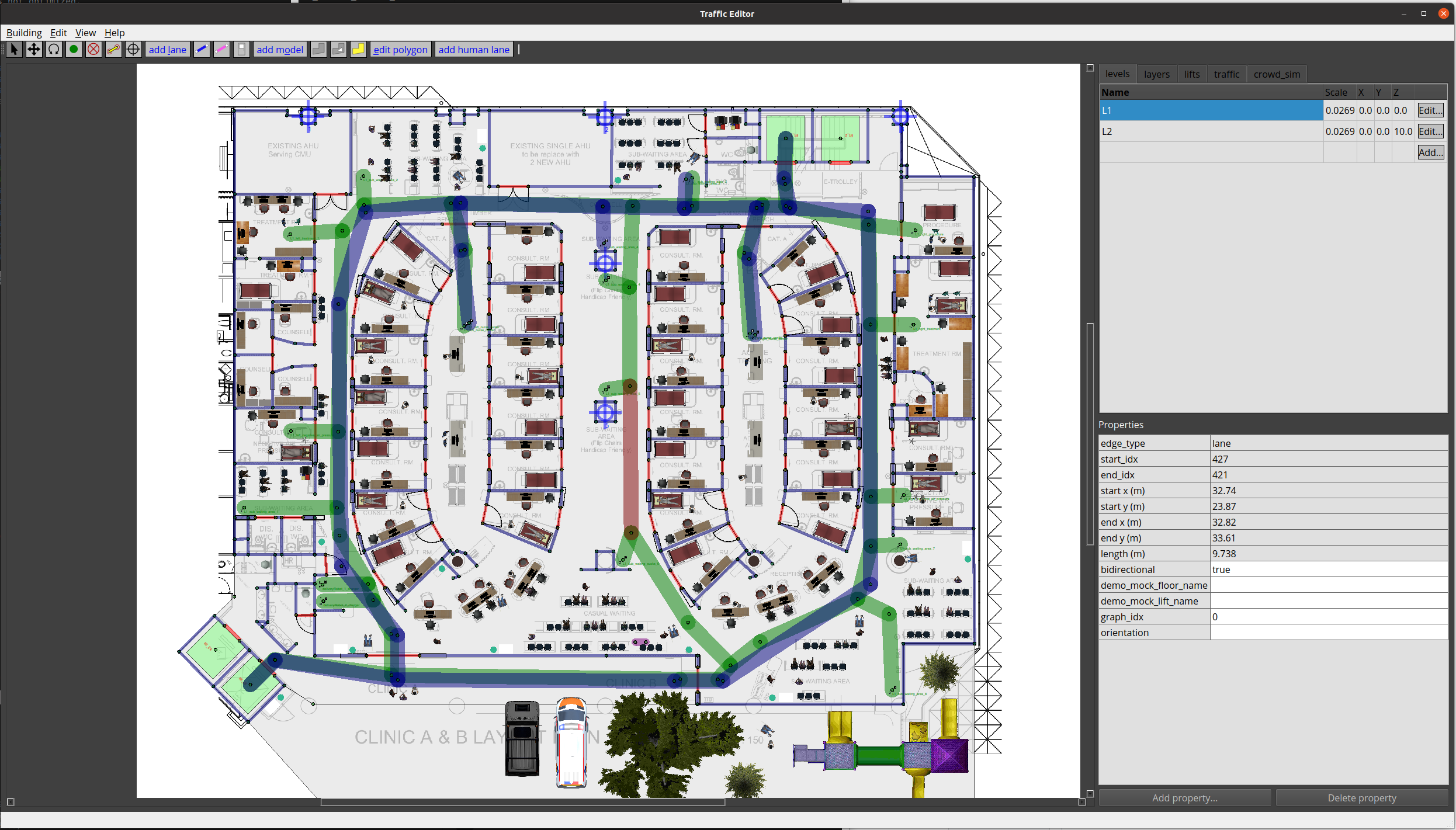
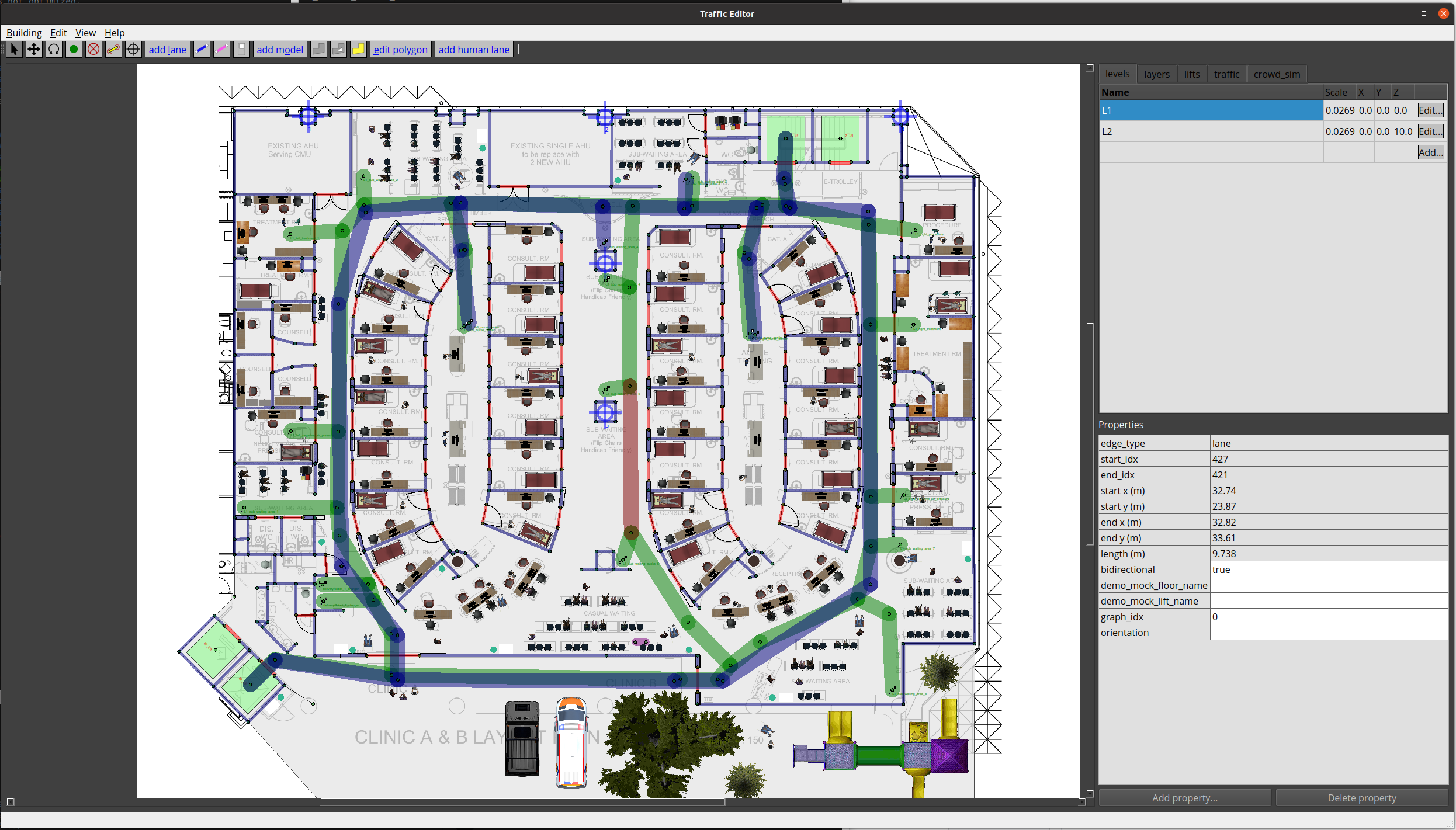
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | jazzy |
| Last Updated | 2025-05-05 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.9.3 |
| rmf_traffic_editor | 1.9.3 |
| rmf_traffic_editor_assets | 1.9.3 |
| rmf_traffic_editor_test_maps | 1.9.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!

This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
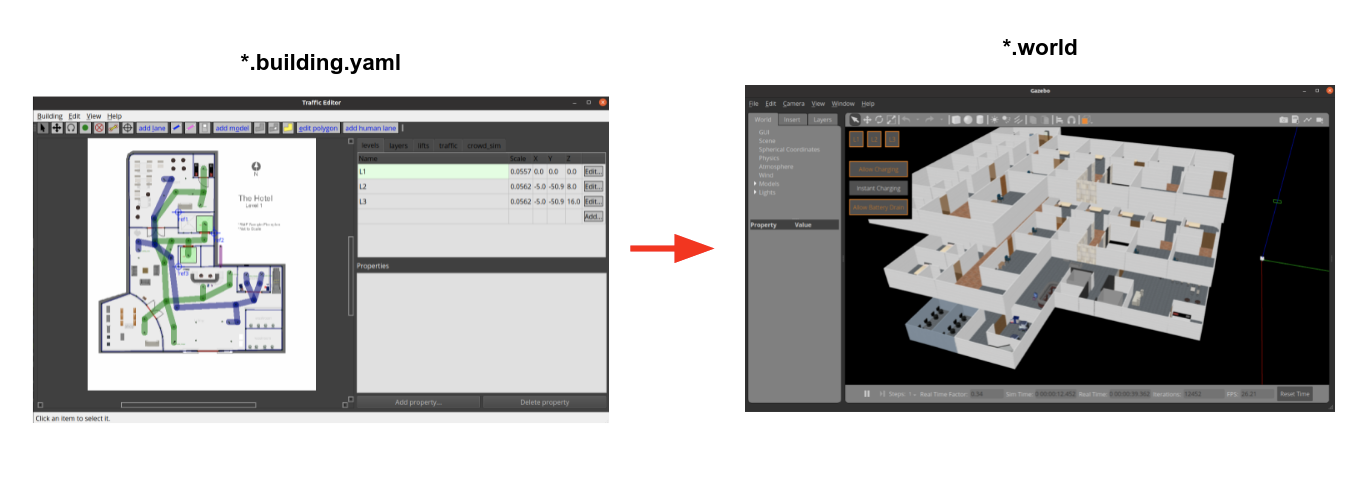
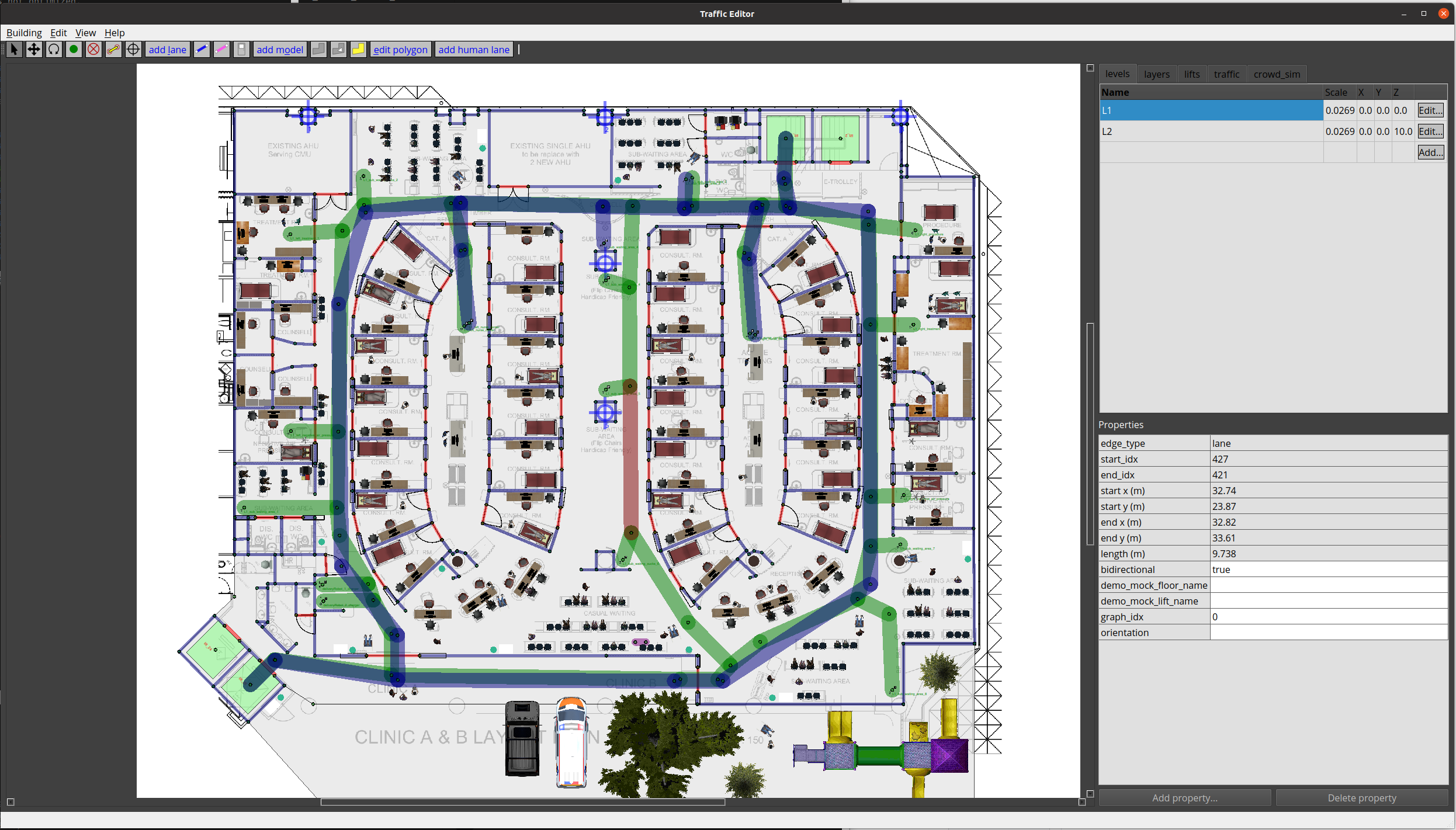
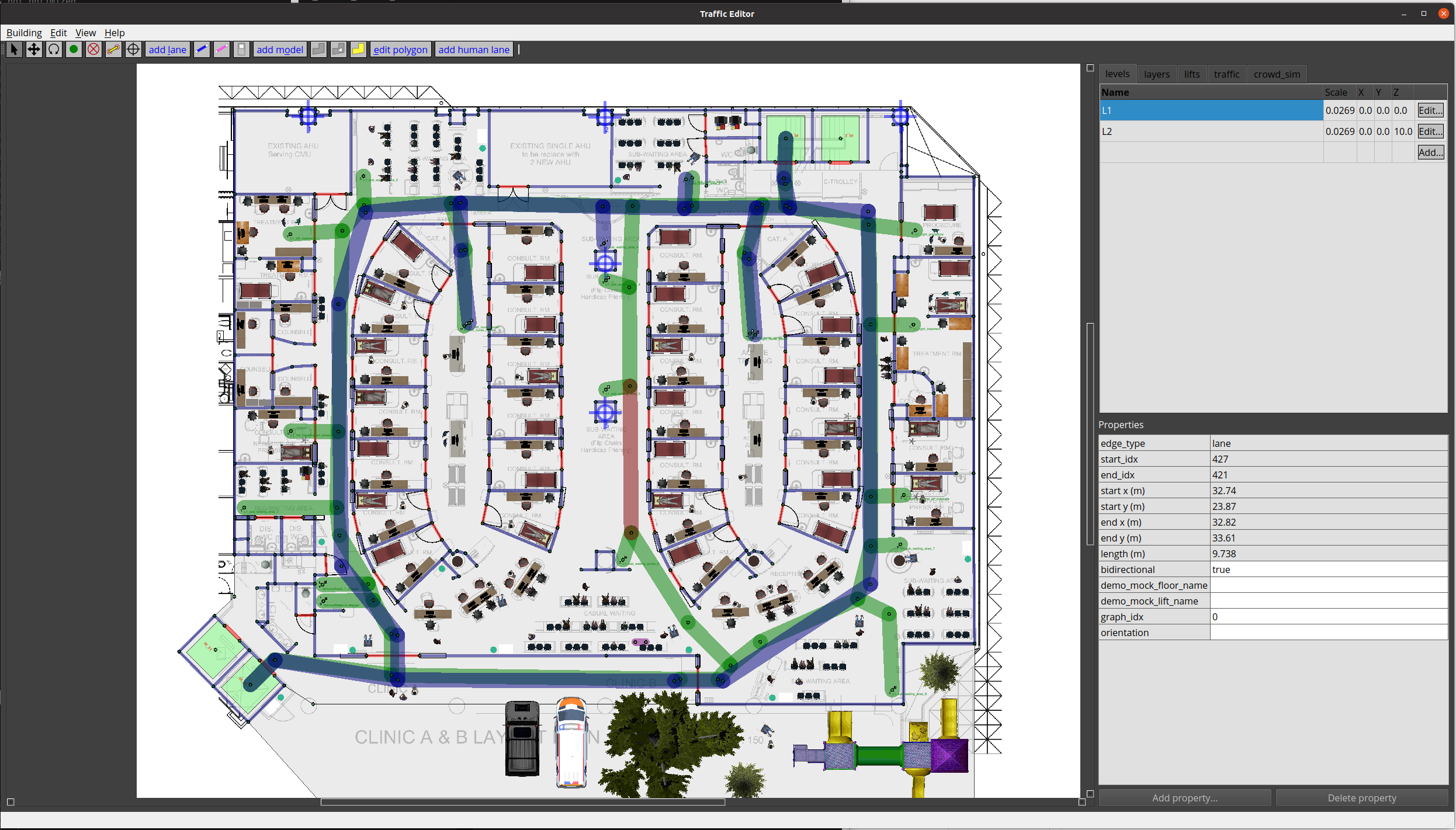
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | kilted |
| Last Updated | 2025-05-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.12.0 |
| rmf_traffic_editor | 1.12.0 |
| rmf_traffic_editor_assets | 1.12.0 |
| rmf_traffic_editor_test_maps | 1.12.0 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-08-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.14.0 |
| rmf_traffic_editor | 1.14.0 |
| rmf_traffic_editor_assets | 1.14.0 |
| rmf_traffic_editor_test_maps | 1.14.0 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-08-04 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.14.0 |
| rmf_traffic_editor | 1.14.0 |
| rmf_traffic_editor_assets | 1.14.0 |
| rmf_traffic_editor_test_maps | 1.14.0 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | galactic |
| Last Updated | 2021-09-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.4.0 |
| rmf_traffic_editor | 1.4.0 |
| rmf_traffic_editor_assets | 1.4.0 |
| rmf_traffic_editor_test_maps | 1.4.0 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | foxy |
| Last Updated | 2021-09-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.4.0 |
| rmf_traffic_editor | 1.4.0 |
| rmf_traffic_editor_assets | 1.4.0 |
| rmf_traffic_editor_test_maps | 1.4.0 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2023-12-15 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.7.2 |
| rmf_traffic_editor | 1.7.2 |
| rmf_traffic_editor_assets | 1.7.2 |
| rmf_traffic_editor_test_maps | 1.7.2 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.

Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}
CONTRIBUTING
|
|
rmf_traffic_editor repositoryrmf_building_map_tools rmf_traffic_editor rmf_traffic_editor_assets rmf_traffic_editor_test_maps |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/open-rmf/rmf_traffic_editor.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2024-11-08 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rmf_building_map_tools | 1.6.3 |
| rmf_traffic_editor | 1.6.3 |
| rmf_traffic_editor_assets | 1.6.3 |
| rmf_traffic_editor_test_maps | 1.6.3 |
README
![]()
![]()
rmf_traffic_editor
Welcome!
This repository has the following directories:
-
rmf_traffic_editor: GUI for annotating floorplans to create traffic patterns -
rmf_building_map_tools: Python-based tools to use and manipulate the map files created byrmf_traffic_editor, such as:-
building_map_server: a ROS 2 node to serve maps usingrmf_building_map_msgs - translators to simulators such as Gazebo
- translators to navigation packages such as
rmf_core(e.g.rmf_ros2) - scripts that handle downloading of gazebo models.
pit_crew,building_map_model_downloader…
-
-
rmf_traffic_editor_assets: Gazebo model thumbnails, in used bytraffic_editorGUI
Installation
This repository is structured as a collection of ROS 2 packages and can be built using colcon.
For full installation of RMF, please refer to here.
The rmf_building_map_tools package requires the following Python 3 dependencies to generate worlds:
sudo apt install python3-shapely python3-yaml python3-requests
Usage
rmf_traffic_editor consists of a interface and tools to create a simulation .world file from a sketched building floor plan.
These simulation .world file can be used by other applications, not just limited to RMF.
Traffic Editor GUI
Instructions of traffic_editor is located here
To run traffic_editor GUI, run:
source install/setup.bash
traffic-editor
Building Map Tools
Once done with the editing of the building map with traffic_editor, user can now generate the simulated world file from the saved .building.yaml file (${building_map_path}).
Generate a world file from building map
ros2 run rmf_building_map_tools building_map_generator gazebo \
${building_map_path} ${output_world_path} ${output_model_dir}
switch arg gazebo to ignition for generating a world file for ignition
Download models used in newly created traffic editor building map.
ros2 run rmf_building_map_tools building_map_model_downloader \
${building_map_path} -f -e ~/.gazebo/models
Generate Traffic Navigation Path File
ros2 run rmf_building_map_tools building_map_generator nav \
${building_map_path} ${output_nav_graphs_dir}