
No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
No version for distro ardent. Known supported distros are highlighted in the buttons above.
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
No version for distro crystal. Known supported distros are highlighted in the buttons above.
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
No version for distro dashing. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro foxy. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro lunar. Known supported distros are highlighted in the buttons above.
No version for distro jade. Known supported distros are highlighted in the buttons above.
Repository Summary
| Checkout URI | https://github.com/CIR-KIT/remote_monitor.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2016-12-23 |
| Dev Status | MAINTAINED |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| remote_monitor | 0.1.0 |
README
remote_monitor 

Remote monitoring package for navigation
Demo Video
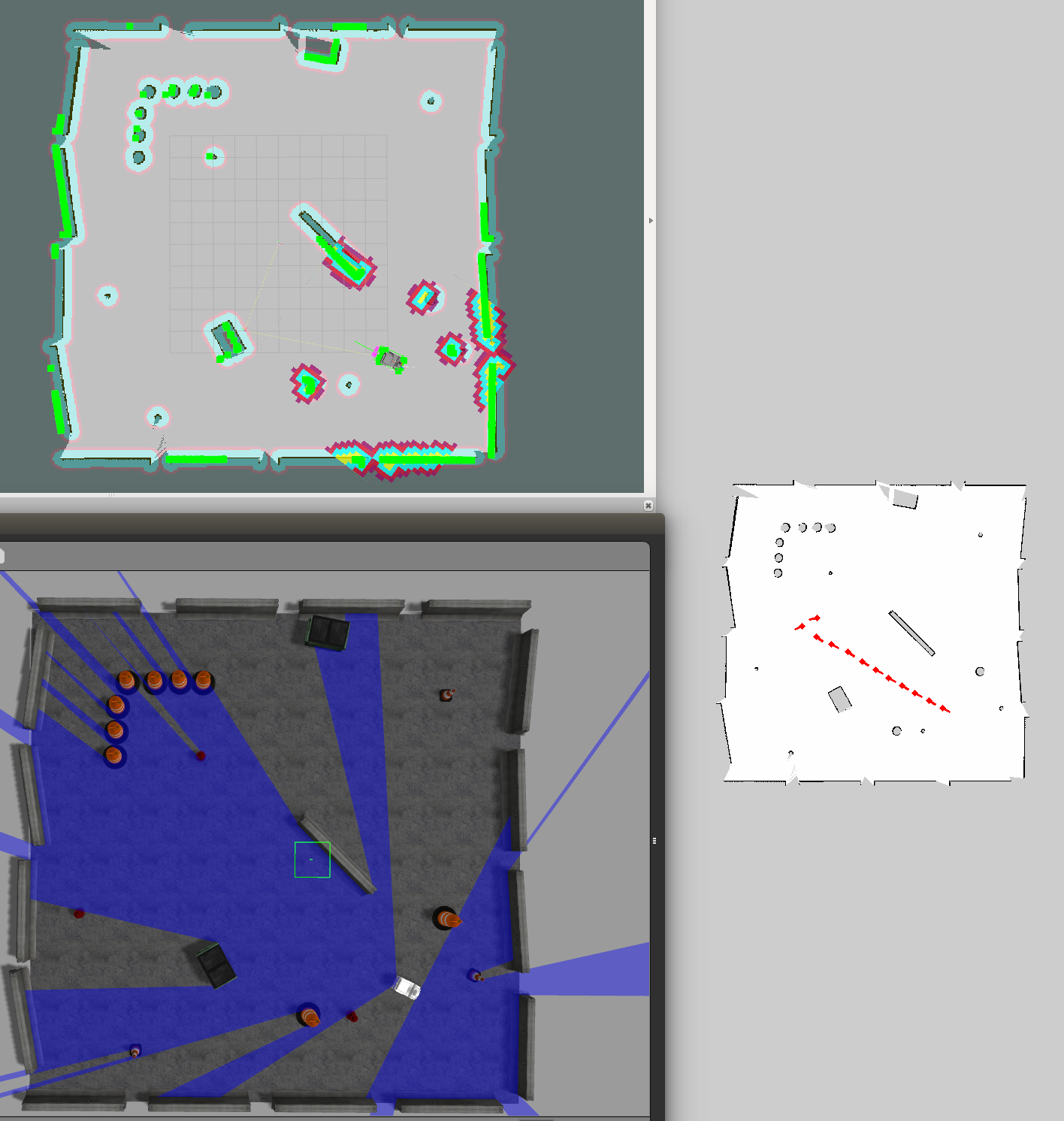
下記のコマンドで上記動画のように遊べるはずです
$ roslaunch cirkit_unit03_navigation_gazebo autorun.launch
$ roslaunch remote_monitor remote_monitor_server.launch gazebo:=true map_yaml:=playpen_map.yaml
$ roslaunch remote_monitor remote_monitor_client.launch
Nodes
monitor_server
- 遠隔監視PC側
node.serviceで受信した位置と姿勢を地図上に表示させる
monitor_client
- 移動ロボット側
node.一定距離毎に現在位置と姿勢をserviceで送信する. - デフォルトでは
/amcl_poseをsubscribeする.
Installation
以下のコマンドにしたがってインストールしてください.
なお<catkin_ws>は,任意のcatkinizeされたワークスペースへのパスを表します.
$ cd <catkin_ws>/src
$ git clone https://github.com/CIR-KIT/remote_monitor.git
$ cd <catkin_ws>
$ wstool init src
$ wstool merge -t src src/remote_monitor/remote_monitor.rosinstall
$ wstool update -t src
$ rosdep update && rosdep install -r -y --from-paths src --ignore-src
$ catkin_make
$ source devel/setup.bash
How to launch
service server
- 地図の在処として,下記のパッケージ配下のフォルダを見に行きます.
- $(find cirkit_unit03_maps)/map/`
-
地図名は引数で指定して下さい.
- 実機の場合のコマンド
$ roslaunch remote_monitor remote_monitor_server.launch map_yaml:=hogehoge.yaml
-
Gazeboの場合のコマンド
$ roslaunch remote_monitor remote_monitor_server_gazebo.launch map_yaml:=hogehoge.yaml
service client
1. サーバー側のグローバルIPを設定する.
-
まずサーバ側の人にグローバルIPを聞く
-
以下の容量で設定ファイルに反映させる.
$ cd /etc/openvpn
$ emacs client.conf
# 省略
# グローバルIPアドレスを指定する.
remote 101.102.103.xxx 1194
# 省略
2. OpenVPNを再起動する.
$ service openvpn restart
3. ネットワークを確認する.
$ ifconfig
- 下記のような
tunデバイスが表示される.少し時間がかかる場合がある.
tun0 Link encap:不明なネット ハードウェアアドレス 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
inetアドレス:10.8.0.6 P-t-P:10.8.0.5 マスク:255.255.255.255
UP POINTOPOINT RUNNING NOARP MULTICAST MTU:1500 メトリック:1
RXパケット:0 エラー:0 損失:0 オーバラン:0 フレーム:0
TXパケット:12 エラー:0 損失:0 オーバラン:0 キャリア:0
衝突(Collisions):0 TXキュー長:100
RXバイト:2892 (2.8 KB) TXバイト:504 (504.0 KB)
- そしてサーバにping
File truncated at 100 lines see the full file
CONTRIBUTING
No version for distro hydro. Known supported distros are highlighted in the buttons above.
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.
No version for distro noetic. Known supported distros are highlighted in the buttons above.