
|
multimaster_fkie repositoryfkie_master_discovery fkie_master_sync fkie_multimaster fkie_multimaster_msgs fkie_node_manager fkie_node_manager_daemon |
|
|
Repository Summary
| Checkout URI | https://github.com/fkie/multimaster_fkie.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-03-30 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| fkie_master_discovery | 1.3.2 |
| fkie_master_sync | 1.3.2 |
| fkie_multimaster | 1.3.2 |
| fkie_multimaster_msgs | 1.3.2 |
| fkie_node_manager | 1.3.2 |
| fkie_node_manager_daemon | 1.3.2 |
README
This is a new version with daemon instance!
Whats new:
- Remote access and control of launch and configuration files.
- Easy remote editing of launch files.
- Monitoring for ROS nodes and system resources on remote hosts.
Old version is available on branch:
old_masterand is no longer supported!
FKIE multimaster for ROS
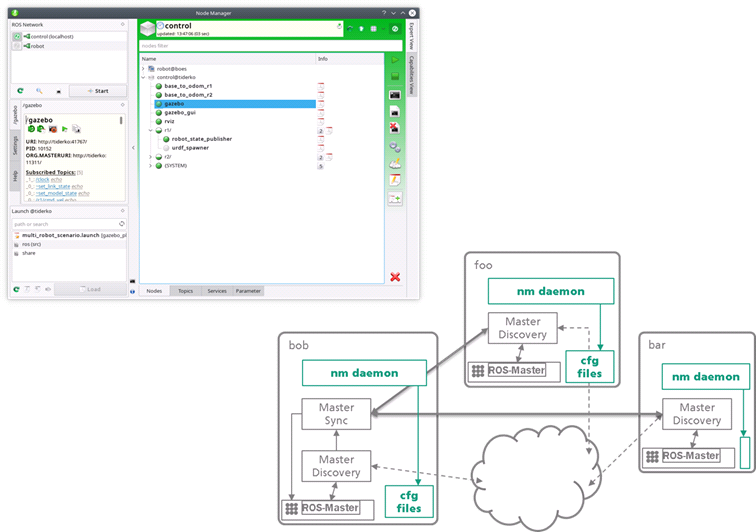
The ROS stack of fkie_multimaster offers a complete solution for using ROS with multicores. In addition, Node Manager with a daemon provide a GUI-based management environment that is very useful to manage ROS-launch configurations and control running nodes, also in a single-core system.
Packages have been renamed
The FKIE multimaster packages used to have an _fkie suffix. In conformance with REP-144, all packages have been renamed with an fkie_ prefix, starting from version 1.0.0. If you have built an older version from source, make sure to remove the build artifacts of the old versions from your build space.
Install
The communication between the Node Manager GUI and the Daemon is based on Python gRPC. If you are using Ubuntu 18.10 or later, you can simply run sudo apt install python-grpcio python-grpc-tools. For Ubuntu 18.04 LTS, we provide a PPA backport of the gRPC libraries. If your Ubuntu version is older than that, you need to install grpcio-tools from PyPI.
You can run the following commands to setup a build from source:
cd catkin_ws/src
git clone https://github.com/fkie/multimaster_fkie.git multimaster
rosdep update
rosdep install -i --as-root pip:false --reinstall --from-paths multimaster
Then build all packages:
catkin build fkie_multimaster
Documentation
- multimaster_fkie
-
discovery –
discovery using multicast or zeroconf -
synchronization –
master synchronization -
Node Manager GUI –
A GUI to manage the configuration on local and remote ROS masters -
Node Manager daemon –
Helper node allows an easy (auto)start of remote nodes and manage remote launch files
For ROS interfaces and parameterization see the ROS Wiki. For configuration details you can find example launch files in each package.
CONTRIBUTING
|
|
multimaster_fkie repositorydefault_cfg_fkie master_discovery_fkie master_sync_fkie multimaster_fkie multimaster_msgs_fkie node_manager_fkie |
|
|
Repository Summary
| Checkout URI | https://github.com/fkie/multimaster_fkie.git |
| VCS Type | git |
| VCS Version | jade-devel |
| Last Updated | 2017-04-24 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| default_cfg_fkie | 0.7.3 |
| master_discovery_fkie | 0.7.3 |
| master_sync_fkie | 0.7.3 |
| multimaster_fkie | 0.7.3 |
| multimaster_msgs_fkie | 0.7.3 |
| node_manager_fkie | 0.7.3 |
README
FKIE multimaster for ROS
The ROS stack of multimaster_fkie offers a complete solution for using ROS with multicores.
The descriptions of individual packets:
- discovery -- [discovery using multicast or zeroconf]{.title-ref}
- synchronization -- [master synchronization]{.title-ref}
- node manager GUI -- [A GUI to manage the configuration on local and remote ROS masters]{.title-ref}
- default configuration -- [Helper node allows an easy (auto)start of remote nodes]{.title-ref}
you can find it also on ros_wiki.
CONTRIBUTING
|
|
multimaster_fkie repositorydefault_cfg_fkie master_discovery_fkie master_sync_fkie multimaster_fkie multimaster_msgs_fkie node_manager_fkie |
|
|
Repository Summary
| Checkout URI | https://github.com/fkie/multimaster_fkie.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2019-04-30 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| default_cfg_fkie | 0.8.12 |
| master_discovery_fkie | 0.8.12 |
| master_sync_fkie | 0.8.12 |
| multimaster_fkie | 0.8.12 |
| multimaster_msgs_fkie | 0.8.12 |
| node_manager_fkie | 0.8.12 |
README
FKIE multimaster for ROS
The ROS stack of multimaster_fkie offers a complete solution for using ROS with multicores.
The descriptions of individual packets:
- discovery -- [discovery using multicast or zeroconf]{.title-ref}
- synchronization -- [master synchronization]{.title-ref}
- node manager GUI -- [A GUI to manage the configuration on local and remote ROS masters]{.title-ref}
- default configuration -- [Helper node allows an easy (auto)start of remote nodes]{.title-ref}
you can find it also on ros_wiki.
CONTRIBUTING
|
|
multimaster_fkie repositorydefault_cfg_fkie master_discovery_fkie master_sync_fkie multimaster_fkie multimaster_msgs_fkie node_manager_fkie |
|
|
Repository Summary
| Checkout URI | https://github.com/fkie/multimaster_fkie.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2015-04-28 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| default_cfg_fkie | 0.4.1 |
| master_discovery_fkie | 0.4.1 |
| master_sync_fkie | 0.4.1 |
| multimaster_fkie | 0.4.1 |
| multimaster_msgs_fkie | 0.4.1 |
| node_manager_fkie | 0.4.1 |
README
FKIE multimaster for ROS
The ROS stack of multimaster_fkie offers a complete solution for using ROS with multicores.
The descriptions of individual packets:
- discovery -- [discovery using multicast or zeroconf]{.title-ref}
- synchronization -- [master synchronization]{.title-ref}
- node manager GUI -- [A GUI to manage the configuration on local and remote ROS masters]{.title-ref}
- default configuration -- [Helper node allows an easy (auto)start of remote nodes]{.title-ref}
you can find it also on ros_wiki.
CONTRIBUTING
|
|
multimaster_fkie repositorydefault_cfg_fkie master_discovery_fkie master_sync_fkie multimaster_fkie multimaster_msgs_fkie node_manager_fkie |
|
|
Repository Summary
| Checkout URI | https://github.com/fkie/multimaster_fkie.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2019-04-30 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| default_cfg_fkie | 0.8.12 |
| master_discovery_fkie | 0.8.12 |
| master_sync_fkie | 0.8.12 |
| multimaster_fkie | 0.8.12 |
| multimaster_msgs_fkie | 0.8.12 |
| node_manager_fkie | 0.8.12 |
README
FKIE multimaster for ROS
The ROS stack of multimaster_fkie offers a complete solution for using ROS with multicores.
The descriptions of individual packets:
- discovery -- [discovery using multicast or zeroconf]{.title-ref}
- synchronization -- [master synchronization]{.title-ref}
- node manager GUI -- [A GUI to manage the configuration on local and remote ROS masters]{.title-ref}
- default configuration -- [Helper node allows an easy (auto)start of remote nodes]{.title-ref}
you can find it also on ros_wiki.
CONTRIBUTING
|
|
multimaster_fkie repositorydefault_cfg_fkie master_discovery_fkie master_sync_fkie multimaster_fkie multimaster_msgs_fkie node_manager_fkie |
|
|
Repository Summary
| Checkout URI | https://github.com/fkie/multimaster_fkie.git |
| VCS Type | git |
| VCS Version | melodic-devel |
| Last Updated | 2020-05-09 |
| Dev Status | MAINTAINED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| default_cfg_fkie | 0.8.12 |
| master_discovery_fkie | 0.8.12 |
| master_sync_fkie | 0.8.12 |
| multimaster_fkie | 0.8.12 |
| multimaster_msgs_fkie | 0.8.12 |
| node_manager_fkie | 0.8.12 |
README
FKIE multimaster for ROS
The ROS stack of multimaster_fkie offers a complete solution for using ROS with multicores.
The descriptions of individual packets:
- discovery -- [discovery using multicast or zeroconf]{.title-ref}
- synchronization -- [master synchronization]{.title-ref}
- node manager GUI -- [A GUI to manage the configuration on local and remote ROS masters]{.title-ref}
- default configuration -- [Helper node allows an easy (auto)start of remote nodes]{.title-ref}
you can find it also on ros_wiki.