
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
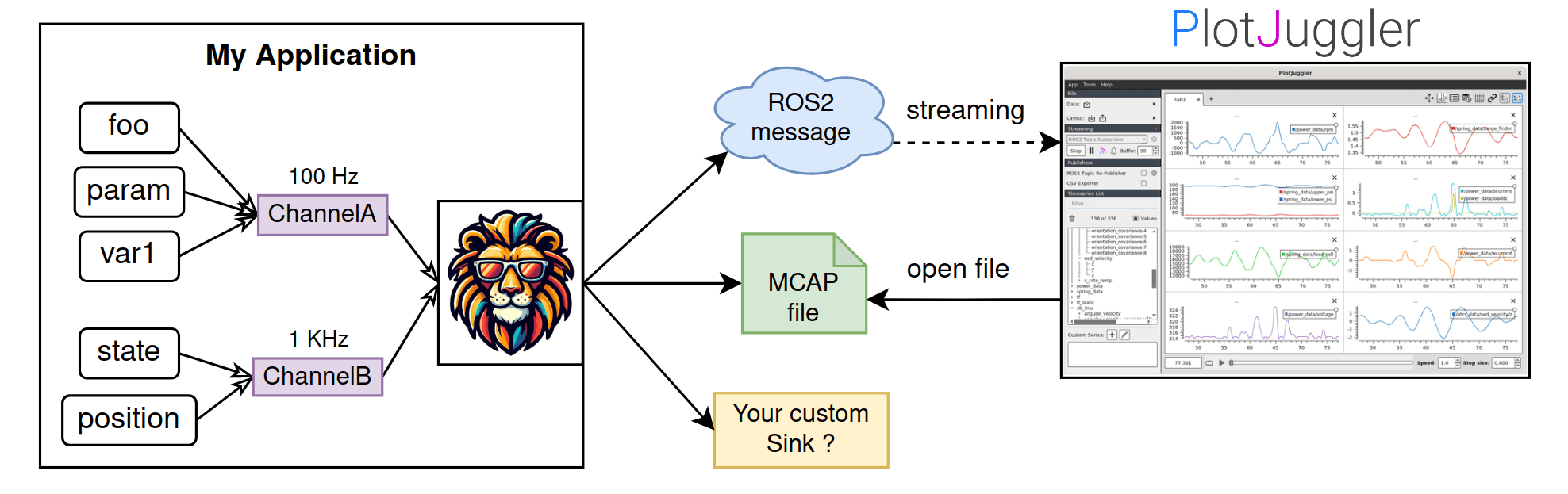
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PickNikRobotics/data_tamer.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-05-08 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| data_tamer_cpp | 1.0.3 |
| data_tamer_msgs | 1.0.3 |
README
![]()
![]()
![]()
![]()
DataTamer is a library to log/trace numerical variables over time and takes periodic “snapshots” of their values, to later visualize them as timeseries.
It works great with PlotJuggler, the timeseries visualization tool (note: you will need PlotJuggler 3.8.2 or later).
DataTamer is “fearless data logger” because you can record hundreds or thousands of variables: even 1 million points per second should have a fairly small CPU overhead.
Since all the values are aggregated in a single “snapshot”, it is usually meant to record data in a periodic loop (a very frequent use case, in robotics applications).
Kudos to pal_statistics, for inspiring this project.
How it works
DataTamer can be used to monitor multiple variables in your applications.
Channels are used to take “snapshots” of a subset of variables at a given time. If you want to record at different frequencies, you can use different channels.
DataTamer will forward the collected data to 1 or multiple sinks; a sink may save the information immediately in a file (currently, we support MCAP) or publish it using an inter-process communication, for instance, a ROS2 publisher.
You can easily create your own, specialized sinks.
Use PlotJuggler to visualize your logs offline or in real-time.
Features
- Serialization schema is created at run-time: no need to do code generation.
- Suitable for real-time applications: very low latency (on the side of the callee).
- Multi-sink architecture: recorded data can be forwarded to multiple “backends”.
- Very low serialization overhead, in the order of 1 bit per traced value.
- The user can enable/disable traced variables at run-time.
Limitations
- Traced variables can not be added (registered) once the recording starts (first
takeSnapshot). - Focused on periodic recording. Not the best option for sporadic, asynchronous events.
- If you use
DataTamer::registerValueyou must be careful about the lifetime of the object. If you prefer a safer RAII interface, useDataTamer::createLoggedValueinstead.
Examples
Basic example
#include "data_tamer/data_tamer.hpp"
#include "data_tamer/sinks/mcap_sink.hpp"
int main()
{
// Multiple channels can use this sink. Data will be saved in mylog.mcap
auto mcap_sink = std::make_shared<DataTamer::MCAPSink>("mylog.mcap");
// Create a channel and attach a sink. A channel can have multiple sinks
auto channel = DataTamer::LogChannel::create("my_channel");
channel->addDataSink(mcap_sink);
// You can register any arithmetic value. You are responsible for their lifetime!
double value_real = 3.14;
int value_int = 42;
auto id1 = channel->registerValue("value_real", &value_real);
auto id2 = channel->registerValue("value_int", &value_int);
// If you prefer to use RAII, use this method instead
// logged_real will unregister itself when it goes out of scope.
auto logged_real = channel->createLoggedValue<float>("my_real");
// Store the current value of all the registered values
channel->takeSnapshot();
// You can disable (i.e., stop recording) a value like this
channel->setEnabled(id1, false);
// or, in the case of a LoggedValue
logged_real->setEnabled(false);
// The next snapshot will contain only [value_int], i.e. [id2],
// since the other two were disabled
channel->takeSnapshot();
}
How to register custom types
Containers such as std::vector and std::array are supported out of the box.
You can also register a custom type, as shown in the example below.
```cpp #include “data_tamer/data_tamer.hpp”
File truncated at 100 lines see the full file