
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
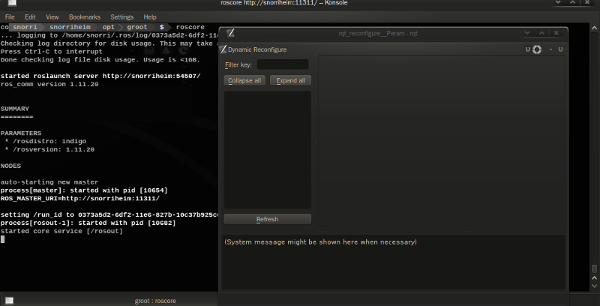
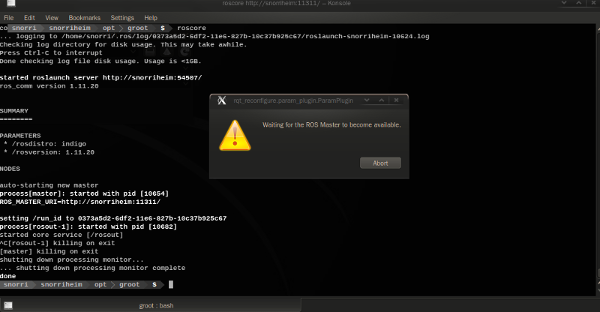
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged rqt_wrapper at Robotics Stack Exchange
|
|
rqt_wrapper package from rqt_wrapper reporqt_wrapper |
ROS Distro
|
Package Summary
| Version | 0.1.4 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/stonier/rqt_wrapper.git |
| VCS Type | git |
| VCS Version | devel |
| Last Updated | 2017-03-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Daniel Stonier
Authors
- Daniel Stonier
RQT Wrapper
Overview
Wrap an rqt plugin so that it automagically goes down and comes up as a ROS master at the other end goes down and comes back up again. This solves the frustration of having to restart all of your rqt applications on your laptop/pc every time you teardown the robot and relaunch it again. Incidentally it will save time and effort as well.
WRQT Reconfigure - With ROS Core
WRQT Reconfigure - Absent ROS Core
The source code is released under a BSD 3-Clause license.
Status
Beta. Areas to be addressed:
- Desktop notifications instead of a dialog while ros is down, #4.
- Reflect all of the arguments that rqt programs usually let you handle, #5.
Usage
Just two lines. This example wraps the rqt_reconfigure plugin:
import rqt_wrapper
import sys
if __name__ == '__main__':
rqt_wrapper = rqt_wrapper.RQTWrapper('rqt_reconfigure.param_plugin.ParamPlugin')
sys.exit(rqt_wrapper.exec_())
Programs
Some of the common rqt programs are recreated here with the wrqt_xxx prefix and
deposited into the global bin directory.
wrqt_graphwrqt_reconfigurewrqt_robot_monitor
Changelog
0.1.4 (2017-03-01)
- update to handle QtGui->QtWidgets in pyqt5
0.1.2 (2016-06-18)
- wrapper script for rqt_py_trees
- wrapper script for rqt_reconfigure
0.1.1 (2016-03-16)
- send SIGINT, not SIGTERM
- wrap the entire rqt process
Package Dependencies
| Deps | Name |
|---|---|
| catkin | |
| python_qt_binding | |
| qt_gui_py_common | |
| rocon_console | |
| rocon_python_utils | |
| rosgraph | |
| rqt_gui | |
| rqt_gui_py | |
| rqt_plot | |
| rqt_reconfigure | |
| rqt_robot_monitor |