
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.4 |
README
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.4 |
README
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.0 |
README
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.0 |
README
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.4 |
README
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.4 |
README
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.4 |
README
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.4 |
README
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2025-04-27 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.4 |
README
SLAMTEC LIDAR ROS2 Package
ROS2 node for SLAMTEC LIDAR
Visit following Website for more details about SLAMTEC LIDAR:
SLAMTEC LIDAR roswiki: http://wiki.ros.org/rplidar
SLAMTEC LIDAR HomePage: http://www.slamtec.com/en/Lidar
SLAMTEC LIDAR SDK: https://github.com/Slamtec/rplidar_sdk
SLAMTEC LIDAR Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Supported SLAMTEC LIDAR
| Lidar Model |
|---|
| RPLIDAR A1 |
| RPLIDAR A2 |
| RPLIDAR A3 |
| RPLIDAR S1 |
| RPLIDAR S2 |
| RPLIDAR S2E |
| RPLIDAR S3 |
| RPLIDAR T1 |
| RPLIDAR C1 |
How to install ROS2
rolling, humble, galactic, foxy
How to configuring your ROS 2 environment
Configuring your ROS 2 environment
How to Create a ROS2 workspace
ROS2 Tutorials Creating a workspace
- example, choose the directory name ros2_ws, for “development workspace” :
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
Compile & Install rplidar_ros package
-
Clone rplidar_ros package from github
Ensure you’re still in the ros2_ws/src directory before you clone:
git clone -b ros2 https://github.com/Slamtec/rplidar_ros.git
-
Build rpidar_ros package
From the root of your workspace (ros2_ws), you can now build rplidar_ros package using the command:
cd ~/ros2_ws/
source /opt/ros/<rosdistro>/setup.bash
colcon build --symlink-install
if you find output like “colcon:command not found”,you need separate install colcon build tools.
- Package environment setup
source ./install/setup.bash
Note: Add permanent workspace environment variables.
It's convenientif the ROS2 environment variables are automatically added to your bash session every time a new shell is launched:
$echo "source <your_own_ros2_ws>/install/setup.bash" >> ~/.bashrc
$source ~/.bashrc
-
Create udev rules for rplidar
rplidar_ros running requires the read and write permissions of the serial device. You can manually modify it with the following command:
sudo chmod 777 /dev/ttyUSB0
But a better way is to create a udev rule:
```bash cd src/rpldiar_ros/ source scripts/create_udev_rules.sh
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.0 |
README
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.0 |
README
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/allenh1/rplidar_ros.git |
| VCS Type | git |
| VCS Version | ros2 |
| Last Updated | 2022-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.0 |
README
RPLIDAR ROS 2 Package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
Getting Started
1) Clone this project to your colcon workspace src folder. 2) Build the package: ```colcon build –symlink-install
Running the Package
=====================================================================
There are two ways to run the RPLIDAR ROS 2 Package.
I. Run rplidar node and view in the rviz
------------------------------------------------------------
RPLIDAR A1/A2:
```ros2 launch rplidar_ros view_rplidar.launch.py
RPLIDAR A3: ```ros2 launch rplidar_ros view_rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros view_rplidar_s1.launch.py
II. Run rplidar node and view using test application
RPLIDAR A1/A2: ```ros2 launch rplidar_ros rplidar.launch.py
```ros2 run rplidar_ros rplidar_composition
RPLIDAR A3: ```ros2 launch rplidar_ros rplidar_a3.launch.py
RPLIDAR S1:
```ros2 launch rplidar_ros rplidar_s1.launch.py
Frame Orientation
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.5 |
README
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin’s workspace src folder 2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
The command for RPLIDAR A1 is :
roslaunch rplidar_ros view_rplidar_a1.launch
The command for RPLIDAR A2M7 is :
roslaunch rplidar_ros view_rplidar_a2m7.launch
The command for RPLIDAR A2M8 is :
roslaunch rplidar_ros view_rplidar_a2m8.launch
The command for RPLIDAR A2M12 is :
roslaunch rplidar_ros view_rplidar_a2m12.launch
The command for RPLIDAR A3 is :
roslaunch rplidar_ros view_rplidar_a3.launch
The command for RPLIDAR S1 is :
roslaunch rplidar_ros view_rplidar_s1.launch
The command for RPLIDAR S2 is :
roslaunch rplidar_ros view_rplidar_s2.launch
The command for RPLIDAR S3 is :
roslaunch rplidar_ros view_rplidar_s3.launch
The command for RPLIDAR S2E is :
roslaunch rplidar_ros view_rplidar_s2e.launch
The command for RPLIDAR T1 is :
roslaunch rplidar_ros view_rplidar_t1.launch
The command for RPLIDAR C1 is :
roslaunch rplidar_ros view_rplidar_c1.launch
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
The command for RPLIDAR A1 is :
roslaunch rplidar_ros rplidar_a1.launch
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/robopeak/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-08-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 1.9.0 |
README
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin's workspace src folder
2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
roslaunch rplidar_ros view_rplidar.launch (for RPLIDAR A1/A2) or roslaunch rplidar_ros view_rplidar_a3.launch (for RPLIDAR A3)
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
roslaunch rplidar_ros rplidar.launch (for RPLIDAR A1/A2) or roslaunch rplidar_ros rplidar_a3.launch (for RPLIDAR A3)
rosrun rplidar_ros rplidarNodeClient
You should see rplidar’s scan result in the console
Notice: the different is serial_baudrate between A1/A2 and A3
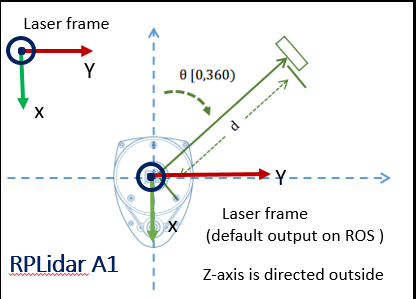
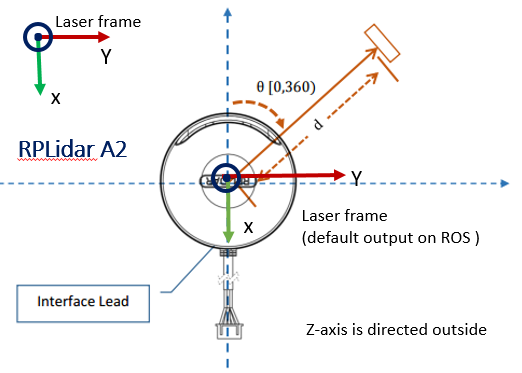
RPLidar frame
RPLidar frame must be broadcasted according to picture shown in rplidar-frame.png
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.5 |
README
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin’s workspace src folder 2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
The command for RPLIDAR A1 is :
roslaunch rplidar_ros view_rplidar_a1.launch
The command for RPLIDAR A2M7 is :
roslaunch rplidar_ros view_rplidar_a2m7.launch
The command for RPLIDAR A2M8 is :
roslaunch rplidar_ros view_rplidar_a2m8.launch
The command for RPLIDAR A2M12 is :
roslaunch rplidar_ros view_rplidar_a2m12.launch
The command for RPLIDAR A3 is :
roslaunch rplidar_ros view_rplidar_a3.launch
The command for RPLIDAR S1 is :
roslaunch rplidar_ros view_rplidar_s1.launch
The command for RPLIDAR S2 is :
roslaunch rplidar_ros view_rplidar_s2.launch
The command for RPLIDAR S3 is :
roslaunch rplidar_ros view_rplidar_s3.launch
The command for RPLIDAR S2E is :
roslaunch rplidar_ros view_rplidar_s2e.launch
The command for RPLIDAR T1 is :
roslaunch rplidar_ros view_rplidar_t1.launch
The command for RPLIDAR C1 is :
roslaunch rplidar_ros view_rplidar_c1.launch
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
The command for RPLIDAR A1 is :
roslaunch rplidar_ros rplidar_a1.launch
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/robopeak/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2018-08-24 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 1.9.0 |
README
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin's workspace src folder
2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
roslaunch rplidar_ros view_rplidar.launch (for RPLIDAR A1/A2) or roslaunch rplidar_ros view_rplidar_a3.launch (for RPLIDAR A3)
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
roslaunch rplidar_ros rplidar.launch (for RPLIDAR A1/A2) or roslaunch rplidar_ros rplidar_a3.launch (for RPLIDAR A3)
rosrun rplidar_ros rplidarNodeClient
You should see rplidar’s scan result in the console
Notice: the different is serial_baudrate between A1/A2 and A3
RPLidar frame
RPLidar frame must be broadcasted according to picture shown in rplidar-frame.png
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.5 |
README
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin’s workspace src folder 2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
The command for RPLIDAR A1 is :
roslaunch rplidar_ros view_rplidar_a1.launch
The command for RPLIDAR A2M7 is :
roslaunch rplidar_ros view_rplidar_a2m7.launch
The command for RPLIDAR A2M8 is :
roslaunch rplidar_ros view_rplidar_a2m8.launch
The command for RPLIDAR A2M12 is :
roslaunch rplidar_ros view_rplidar_a2m12.launch
The command for RPLIDAR A3 is :
roslaunch rplidar_ros view_rplidar_a3.launch
The command for RPLIDAR S1 is :
roslaunch rplidar_ros view_rplidar_s1.launch
The command for RPLIDAR S2 is :
roslaunch rplidar_ros view_rplidar_s2.launch
The command for RPLIDAR S3 is :
roslaunch rplidar_ros view_rplidar_s3.launch
The command for RPLIDAR S2E is :
roslaunch rplidar_ros view_rplidar_s2e.launch
The command for RPLIDAR T1 is :
roslaunch rplidar_ros view_rplidar_t1.launch
The command for RPLIDAR C1 is :
roslaunch rplidar_ros view_rplidar_c1.launch
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
The command for RPLIDAR A1 is :
roslaunch rplidar_ros rplidar_a1.launch
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.5 |
README
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin’s workspace src folder 2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
The command for RPLIDAR A1 is :
roslaunch rplidar_ros view_rplidar_a1.launch
The command for RPLIDAR A2M7 is :
roslaunch rplidar_ros view_rplidar_a2m7.launch
The command for RPLIDAR A2M8 is :
roslaunch rplidar_ros view_rplidar_a2m8.launch
The command for RPLIDAR A2M12 is :
roslaunch rplidar_ros view_rplidar_a2m12.launch
The command for RPLIDAR A3 is :
roslaunch rplidar_ros view_rplidar_a3.launch
The command for RPLIDAR S1 is :
roslaunch rplidar_ros view_rplidar_s1.launch
The command for RPLIDAR S2 is :
roslaunch rplidar_ros view_rplidar_s2.launch
The command for RPLIDAR S3 is :
roslaunch rplidar_ros view_rplidar_s3.launch
The command for RPLIDAR S2E is :
roslaunch rplidar_ros view_rplidar_s2e.launch
The command for RPLIDAR T1 is :
roslaunch rplidar_ros view_rplidar_t1.launch
The command for RPLIDAR C1 is :
roslaunch rplidar_ros view_rplidar_c1.launch
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
The command for RPLIDAR A1 is :
roslaunch rplidar_ros rplidar_a1.launch
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/Slamtec/rplidar_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-20 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rplidar_ros | 2.1.5 |
README
RPLIDAR ROS package
ROS node and test application for RPLIDAR
Visit following Website for more details about RPLIDAR:
rplidar roswiki: http://wiki.ros.org/rplidar
rplidar HomePage: http://www.slamtec.com/en/Lidar
rplidar SDK: https://github.com/Slamtec/rplidar_sdk
rplidar Tutorial: https://github.com/robopeak/rplidar_ros/wiki
How to build rplidar ros package
1) Clone this project to your catkin’s workspace src folder 2) Running catkin_make to build rplidarNode and rplidarNodeClient
How to run rplidar ros package
There’re two ways to run rplidar ros package
I. Run rplidar node and view in the rviz
The command for RPLIDAR A1 is :
roslaunch rplidar_ros view_rplidar_a1.launch
The command for RPLIDAR A2M7 is :
roslaunch rplidar_ros view_rplidar_a2m7.launch
The command for RPLIDAR A2M8 is :
roslaunch rplidar_ros view_rplidar_a2m8.launch
The command for RPLIDAR A2M12 is :
roslaunch rplidar_ros view_rplidar_a2m12.launch
The command for RPLIDAR A3 is :
roslaunch rplidar_ros view_rplidar_a3.launch
The command for RPLIDAR S1 is :
roslaunch rplidar_ros view_rplidar_s1.launch
The command for RPLIDAR S2 is :
roslaunch rplidar_ros view_rplidar_s2.launch
The command for RPLIDAR S3 is :
roslaunch rplidar_ros view_rplidar_s3.launch
The command for RPLIDAR S2E is :
roslaunch rplidar_ros view_rplidar_s2e.launch
The command for RPLIDAR T1 is :
roslaunch rplidar_ros view_rplidar_t1.launch
The command for RPLIDAR C1 is :
roslaunch rplidar_ros view_rplidar_c1.launch
You should see rplidar’s scan result in the rviz.
II. Run rplidar node and view using test application
The command for RPLIDAR A1 is :
roslaunch rplidar_ros rplidar_a1.launch
File truncated at 100 lines see the full file