
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
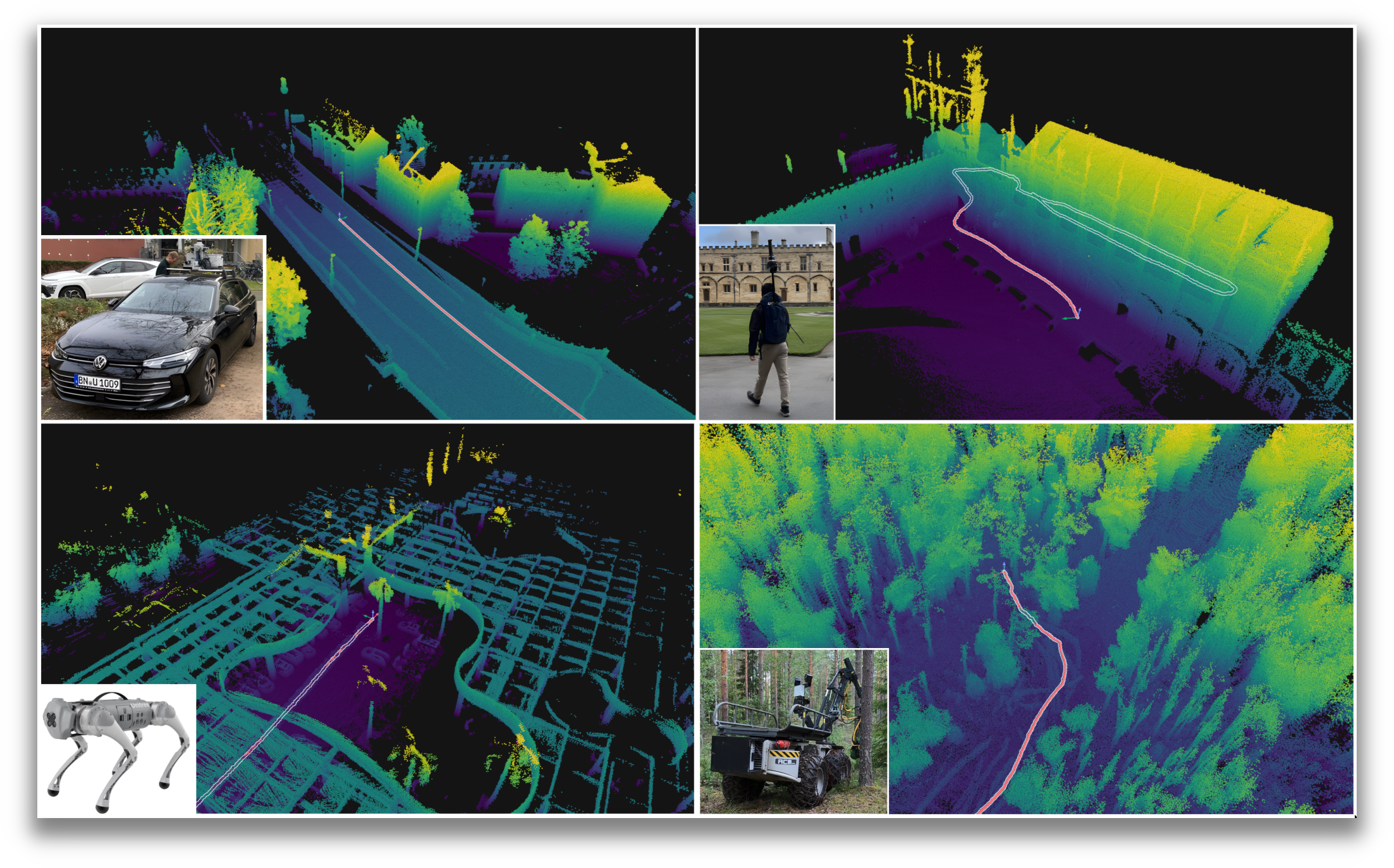
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/PRBonn/rko_lio.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2026-04-02 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| rko_lio | 0.2.0 |
README
RKO-LIO
Robust LiDAR-Inertial Odometry Without Sensor-Specific Modelling
Four different platforms, four different environments, one odometry system
Quick Start
Assuming you have a rosbag (ros1/ros2) which contains a TF tree, you can run RKO-LIO through
pip install rko_lio rosbags rerun-sdk
# data path should be a directory with *.bag files (ROS1) or a metadata.yaml (ROS2)
rko_lio -v /path/to/data
Why pip install those three packages?
-
rko_lio-> the odometry package -
rosbags-> required for the rosbag dataloader. Both ros1 and ros2 bags are supported! -
rerun-sdk-> required for the optional visualizer (-vflag)
Check further options for the CLI through rko_lio --help.
More details are available in the Python usage docs.
Extrinsics and convention
Please note that the system needs the extrinsic to be specified between IMU and LiDAR. Either your data includes this in some format, and then the dataloaders try to automatically read it, or otherwise you can specify it in a config file (required if it’s missing in the data). Pass the config file with
rko_lio --config config_file.yaml
This file needs two keys: extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz, which must each be a list. For example: [0,0,0,1,0,0,0] for identity. Both keys are required.
Throughout this package, I refer to transformations using transform_<from-frame>2<to-frame>. By this, I mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system. Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and $^{ \mathrm{to} }\mathbf{T}_{\mathrm{from}}$ corresponds to transform_<from-frame>_to_<to-frame>.
ROS
Supported distros: Humble, Jazzy, Kilted, Rolling.
sudo apt install ros-$ROS_DISTRO-rko-lio
Or if you’d like to build from source, clone the repo into your colcon workspace and
rosdep install --from-paths src --ignore-src -r -y
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+
In case you cannot system install the necessary dependencies through rosdep, you can also build the dependencies while building RKO-LIO
colcon build --packages-select rko_lio --cmake-args -DRKO_LIO_FETCH_CONTENT_DEPS=ON
A launch file is provided:
ros2 launch rko_lio odometry.launch.py imu_topic:=<topic> lidar_topic:=<topic> base_frame:=base_link
The three parameters imu_topic, lidar_topic, and base_frame are the minimum you need to specify for the launch file. You can specify them and other options all at once in a config file passed with config_file:=file.yaml.
Check further launch configuration options through ros2 launch rko_lio odometry.launch.py -s
More details are available in the ROS usage docs.
The same note above about extrinsics applies here as well. Though you probably have a well defined TF tree and need not concern yourself with this (I hope).
Citation
If you found this work useful, please consider leaving a star :star: on this repository and citing our paper:
```bib @article{malladi2025arxiv,
File truncated at 100 lines see the full file