No version for distro humble. Known supported distros are highlighted in the buttons above.
No version for distro jazzy. Known supported distros are highlighted in the buttons above.
No version for distro kilted. Known supported distros are highlighted in the buttons above.
No version for distro rolling. Known supported distros are highlighted in the buttons above.
No version for distro ardent. Known supported distros are highlighted in the buttons above.
No version for distro bouncy. Known supported distros are highlighted in the buttons above.
No version for distro crystal. Known supported distros are highlighted in the buttons above.
No version for distro eloquent. Known supported distros are highlighted in the buttons above.
No version for distro dashing. Known supported distros are highlighted in the buttons above.
No version for distro galactic. Known supported distros are highlighted in the buttons above.
No version for distro foxy. Known supported distros are highlighted in the buttons above.
No version for distro iron. Known supported distros are highlighted in the buttons above.
No version for distro lunar. Known supported distros are highlighted in the buttons above.
No version for distro jade. Known supported distros are highlighted in the buttons above.
No version for distro indigo. Known supported distros are highlighted in the buttons above.
No version for distro hydro. Known supported distros are highlighted in the buttons above.
No version for distro kinetic. Known supported distros are highlighted in the buttons above.
No version for distro melodic. Known supported distros are highlighted in the buttons above.
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
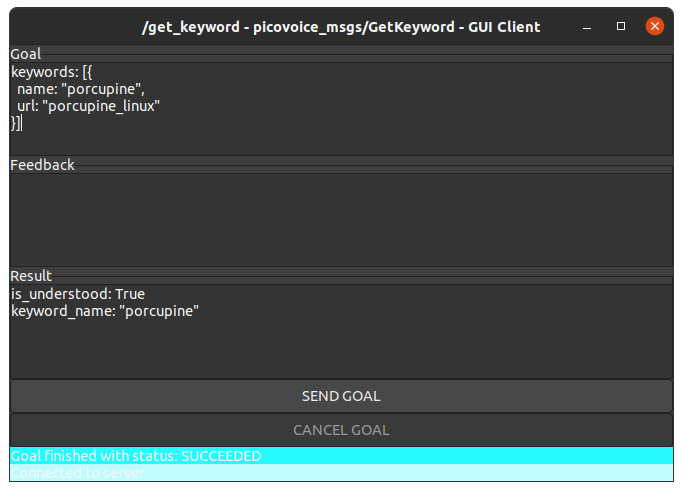
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
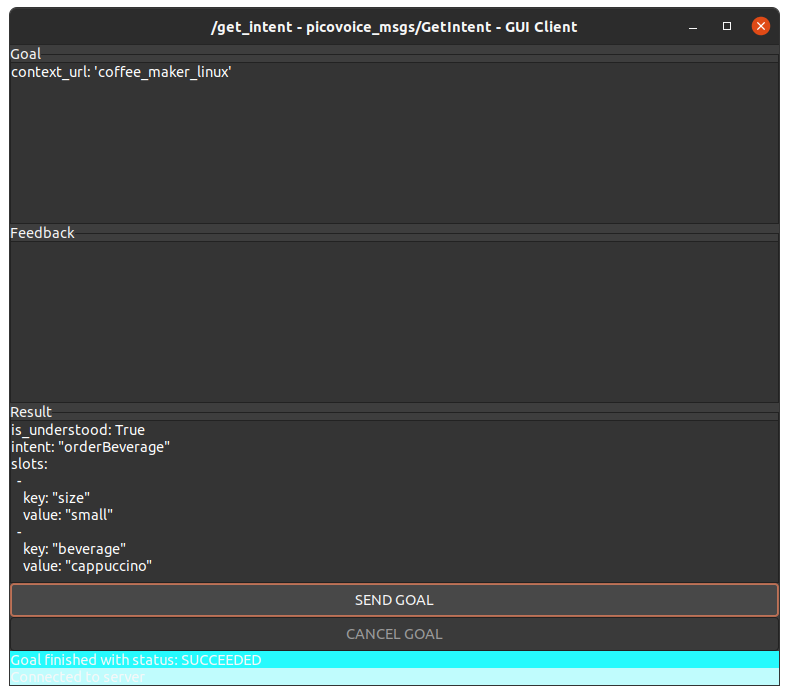
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”