
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
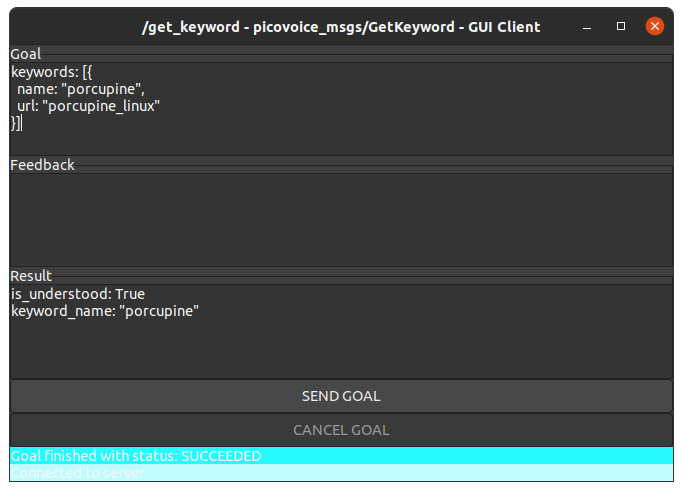
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
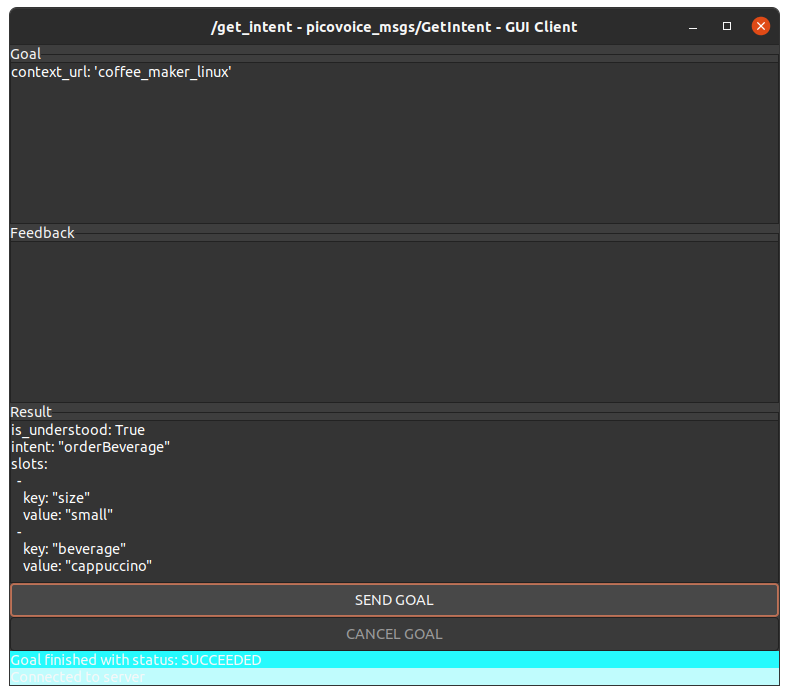
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/reinzor/picovoice_ros.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2022-03-29 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| picovoice_driver | 1.0.1 |
| picovoice_msgs | 1.0.1 |
README
Picovoice ROS
This repository contains drivers and ROS interfaces for the Picovoice libraries. Input files can be managed via the Picovoice console.
Installation
Debians
Prerequisites: Working ROS Noetic environment
sudo apt-get install ros-noetic-picovoice-driver
Source
roscd && cd ../src # Navigate to the 'src' dir of your catkin workspace
git clone https://github.com/reinzor/picovoice_ros.git
cd picovoice_ros
rosdep install --from-path -y -i .
catkin_make # Compile workspace (or catkin build)
Examples
Start a roscore:
roscore
Keyword recognition (Porcupine)
Start the porcupine recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_porcupine _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_keyword # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
keywords: [{
name: "porcupine",
url: "porcupine_linux"
}]
press SEND GOAL, and say “Porcupine”
Intent recognition (Rhino)
Start the rhino recognizer from the picovoice_driver package
Access key: https://console.picovoice.ai/
rosrun picovoice_driver picovoice_driver_rhino _access_key:=[YOUR_ACCESS_KEY_HERE]
Start the axclient in order to evaluate the action interface of the driver
rosrun actionlib_tools axclient.py /get_intent # ros-noetic-actionlib-tools (for earlier distro's it should be included in the 'actionlib` package)
Set the following as Goal
context_url: 'coffee_maker_linux'
and press SEND GOAL, and say “Small cappuccino”