
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:

Object template
In order to segment the pringles pot based on its color an image template like the following one is required:

histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
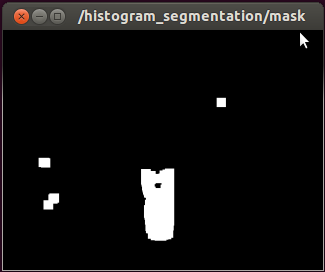
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
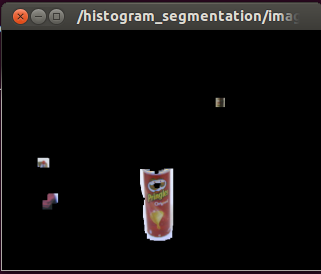
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/pal_vision_segmentation.git |
| VCS Type | git |
| VCS Version | hydro-devel |
| Last Updated | 2014-11-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| pal_vision_segmentation | 1.0.0 |
README
=========
Software package providing segmentation nodes based on various techniques. Masked image or mask is provided, and can be tuned via dynamic_reconfigure. More information can be found in http://wiki.ros.org/pal_vision_segmentation.
Segmentation based on color histogram
Hereafter an example based on images recorded in a rosbag is presented.
Play the rosbag
Play the rosbag provided as example in pal_vision_segmentation:
rosbag play `rospack find pal_vision_segmentation`/etc/pringles.bag --loop
which publishes images of a pringles pot:
Object template
In order to segment the pringles pot based on its color an image template like the following one is required:
histogram_segmentation node
Launch the ‘histogram_segmentation’ node as follows so that the appropriate object template is used:
rosrun pal_vision_segmentation histogram_segmentation `rospack find pal_vision_segmentation`/etc/pringles_template.png image:=/stereo/left/image _dilate_iterations:=5 _erode_iterations:=1
Visualize the segmentation mask
rosrun image_view image_view image:=/histogram_segmentation/mask
Visualize the segmented image:
rosrun image_view image_view image:=/histogram_segmentation/image_masked