
Repository Summary
| Checkout URI | https://github.com/swri-robotics/mapviz.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2025-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mapviz | 2.5.6 |
| mapviz_interfaces | 2.5.6 |
| mapviz_plugins | 2.5.6 |
| multires_image | 2.5.6 |
| tile_map | 2.5.6 |
README
Mapviz
| Humble | Jazzy | Kilted | Rolling |
| :— | :— | :— | :— |
| |
|
|
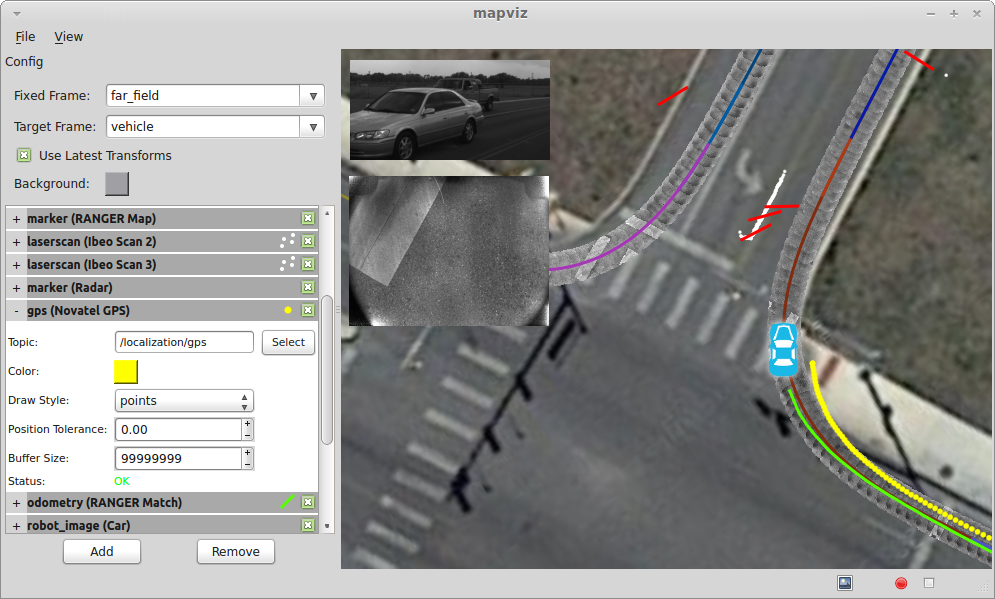
Mapviz is a ROS based visualization tool with a plug-in system similar to RVIZ focused on visualizing 2D data.
Usage
View the documentation for usage information.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/mapviz.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2025-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mapviz | 2.5.6 |
| mapviz_interfaces | 2.5.6 |
| mapviz_plugins | 2.5.6 |
| multires_image | 2.5.6 |
| tile_map | 2.5.6 |
README
Mapviz
| Humble | Jazzy | Kilted | Rolling |
| :— | :— | :— | :— |
| |
|
|
Mapviz is a ROS based visualization tool with a plug-in system similar to RVIZ focused on visualizing 2D data.
Usage
View the documentation for usage information.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/mapviz.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2025-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mapviz | 2.5.6 |
| mapviz_interfaces | 2.5.6 |
| mapviz_plugins | 2.5.6 |
| multires_image | 2.5.6 |
| tile_map | 2.5.6 |
README
Mapviz
| Humble | Jazzy | Kilted | Rolling |
| :— | :— | :— | :— |
| |
|
|
Mapviz is a ROS based visualization tool with a plug-in system similar to RVIZ focused on visualizing 2D data.
Usage
View the documentation for usage information.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/mapviz.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2025-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mapviz | 2.5.6 |
| mapviz_interfaces | 2.5.6 |
| mapviz_plugins | 2.5.6 |
| multires_image | 2.5.6 |
| tile_map | 2.5.6 |
README
Mapviz
| Humble | Jazzy | Kilted | Rolling |
| :— | :— | :— | :— |
| |
|
|
Mapviz is a ROS based visualization tool with a plug-in system similar to RVIZ focused on visualizing 2D data.
Usage
View the documentation for usage information.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/mapviz.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2025-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mapviz | 2.5.6 |
| mapviz_interfaces | 2.5.6 |
| mapviz_plugins | 2.5.6 |
| multires_image | 2.5.6 |
| tile_map | 2.5.6 |
README
Mapviz
| Humble | Jazzy | Kilted | Rolling |
| :— | :— | :— | :— |
| |
|
|
Mapviz is a ROS based visualization tool with a plug-in system similar to RVIZ focused on visualizing 2D data.
Usage
View the documentation for usage information.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/mapviz.git |
| VCS Type | git |
| VCS Version | ros2-devel |
| Last Updated | 2025-07-01 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mapviz | 2.5.6 |
| mapviz_interfaces | 2.5.6 |
| mapviz_plugins | 2.5.6 |
| multires_image | 2.5.6 |
| tile_map | 2.5.6 |
README
Mapviz
| Humble | Jazzy | Kilted | Rolling |
| :— | :— | :— | :— |
| |
|
|
Mapviz is a ROS based visualization tool with a plug-in system similar to RVIZ focused on visualizing 2D data.
Usage
View the documentation for usage information.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/mapviz.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mapviz | 1.4.3 |
| mapviz_plugins | 1.4.3 |
| multires_image | 1.4.3 |
| tile_map | 1.4.3 |
README
Mapviz
| Noetic |
| :— |
| |
Mapviz is a ROS based visualization tool with a plug-in system similar to RVIZ focused on visualizing 2D data.
Usage
View the documentation for usage information.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/mapviz.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mapviz | 1.4.3 |
| mapviz_plugins | 1.4.3 |
| multires_image | 1.4.3 |
| tile_map | 1.4.3 |
README
Mapviz
| Noetic |
| :— |
| |
Mapviz is a ROS based visualization tool with a plug-in system similar to RVIZ focused on visualizing 2D data.
Usage
View the documentation for usage information.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/swri-robotics/mapviz.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-09-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| mapviz | 1.4.3 |
| mapviz_plugins | 1.4.3 |
| multires_image | 1.4.3 |
| tile_map | 1.4.3 |
README
Mapviz
| Noetic |
| :— |
| |
Mapviz is a ROS based visualization tool with a plug-in system similar to RVIZ focused on visualizing 2D data.
Usage
View the documentation for usage information.