
Repository Summary
| Checkout URI | https://github.com/atenpas/handle_detector.git |
| VCS Type | git |
| VCS Version | indigo |
| Last Updated | 2017-01-31 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| handle_detector | 1.3.1 |
README
Handle Detector
Author: Andreas ten Pas (atp@ccs.neu.edu)
Version: 1.0.0
Wiki: http://wiki.ros.org/handle_detector
Author’s Website: http://www.ccs.neu.edu/home/atp/
OVERVIEW
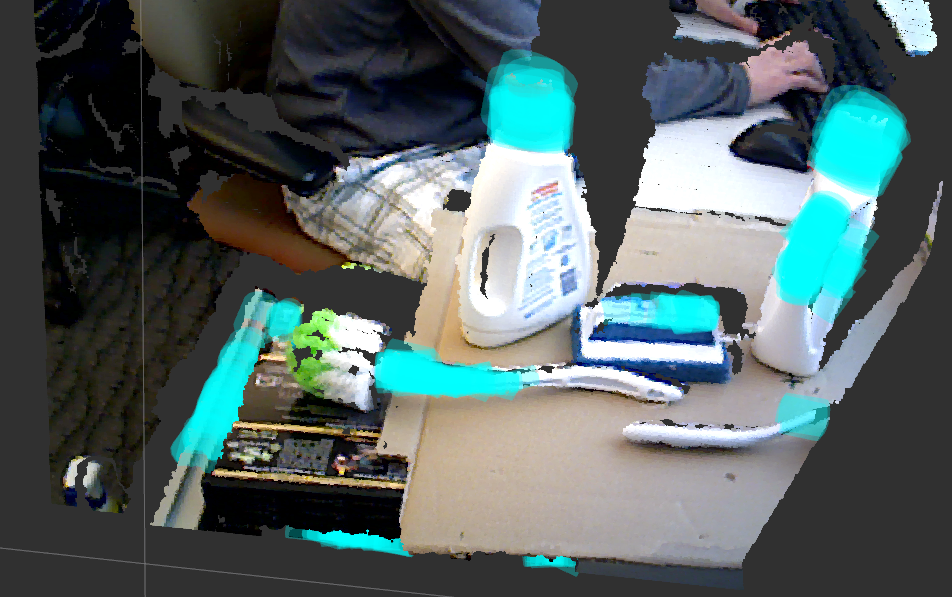
This package takes a point cloud as input and produces a list of handels / enveloping grasp affordances as output.
Input: point cloud
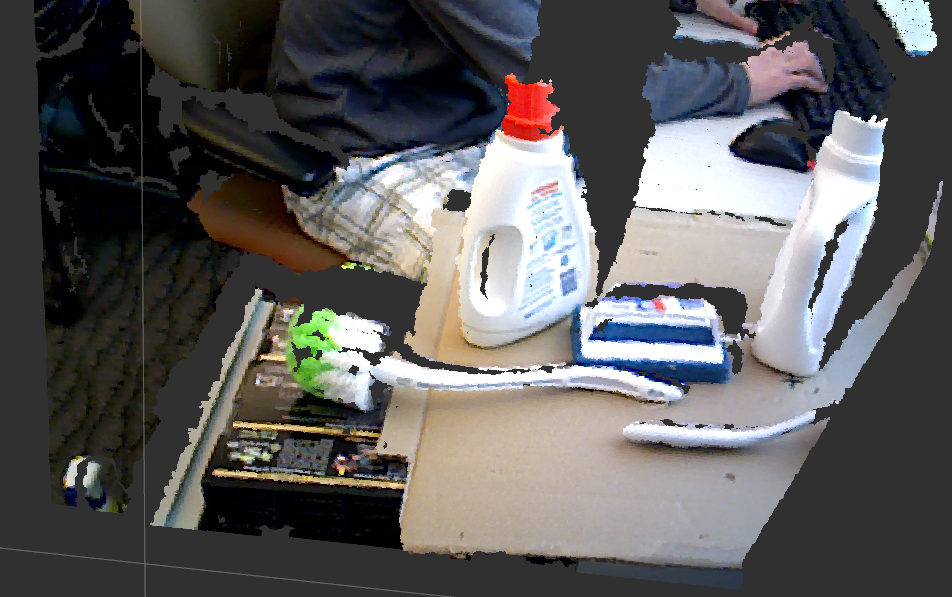
Output: handles / enveloping grasp affordances
REQUIREMENTS
- ROS Hydro (http://wiki.ros.org/hydro)
- Lapack (install in Ubuntu using: sudo apt-get install liblapack-dev)
- Openni_launch (http://wiki.ros.org/openni_launch; install in Ubuntu using: sudo apt-get install ros-hydro-openni-launch)
INSTRUCTIONS
Please look at http://wiki.ros.org/handle_detector for detailed instructions.
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/atenpas/handle_detector.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2014-10-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| handle_detector | 1.1.0 |
README
Handle Detector
Author: Andreas ten Pas (atp@ccs.neu.edu)
Version: 1.0.0
Wiki: http://wiki.ros.org/handle_detector
Author’s Website: http://www.ccs.neu.edu/home/atp/
REQUIREMENTS
- ROS Hydro (http://wiki.ros.org/hydro)
- Lapack (install in Ubuntu using: sudo apt-get install liblapack-dev)
- Openni_launch (http://wiki.ros.org/openni_launch; install in Ubuntu using: sudo apt-get install ros-hydro-openni-launch)
INSTRUCTIONS
Please look at http://wiki.ros.org/handle_detector for detailed instructions.
LINKS
Instructions: http://wiki.ros.org/handle_detector Source: https://github.com/atenpas/handle_detector
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/atenpas/handle_detector.git |
| VCS Type | git |
| VCS Version | kinetic |
| Last Updated | 2018-07-22 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| handle_detector | 1.3.1 |
README
Handle Detector
Author: Andreas ten Pas (atp@ccs.neu.edu)
Version: 1.0.0
Wiki: http://wiki.ros.org/handle_detector
Author’s Website: http://www.ccs.neu.edu/home/atp/
OVERVIEW
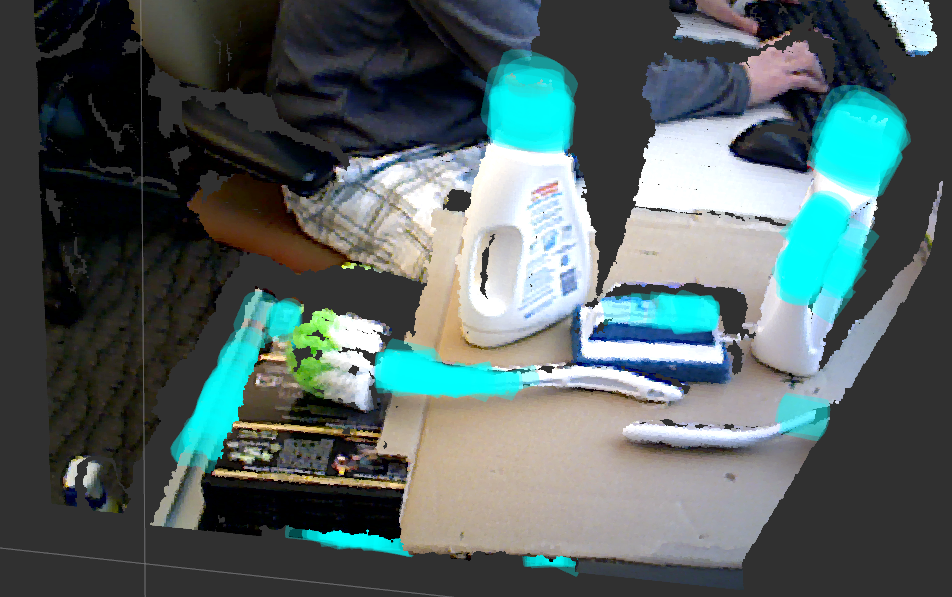
This package takes a point cloud as input and produces a list of handels / enveloping grasp affordances as output.
Input: point cloud
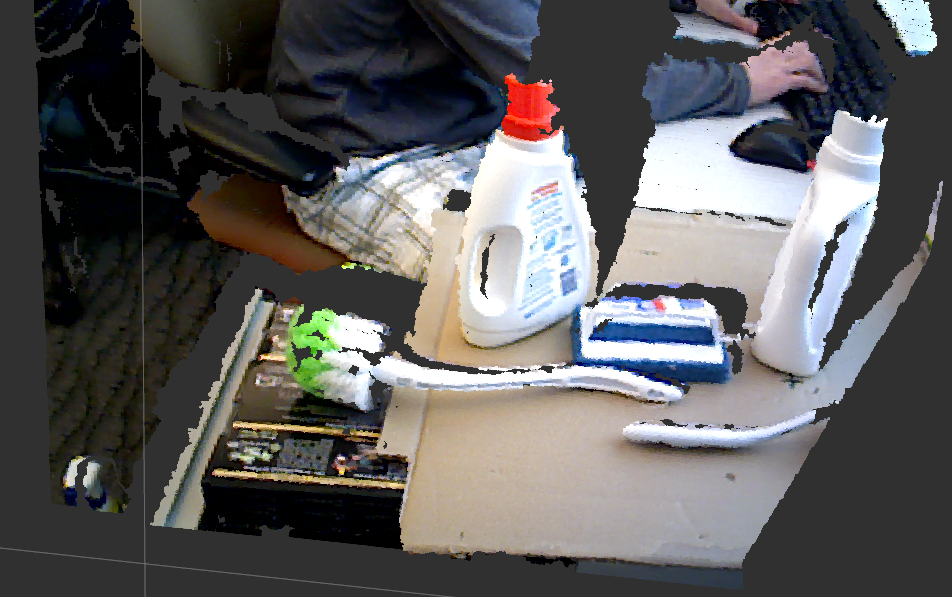
Output: handles / enveloping grasp affordances
REQUIREMENTS
- ROS Kinetic (http://wiki.ros.org/kinetic)
- Lapack (install in Ubuntu using: sudo apt-get install liblapack-dev)
- Openni_launch (http://wiki.ros.org/openni_launch; install in Ubuntu using: sudo apt install ros-kinetic-openni-launch)
INSTRUCTIONS
- Run handle detection on a *.pcd file:
roslaunch handle_detector localization_pcd_file.launch - Run handle detection with a depth sensor (e.g., Kinect):
roslaunch handle_detector localization_sensor.launch - Run handle detection with importance sampling on a *.pcd file:
roslaunch handle_detector importance_sampling_pcd_file.launch
For detailed instructions, have a look at: http://wiki.ros.org/handle_detector.