Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
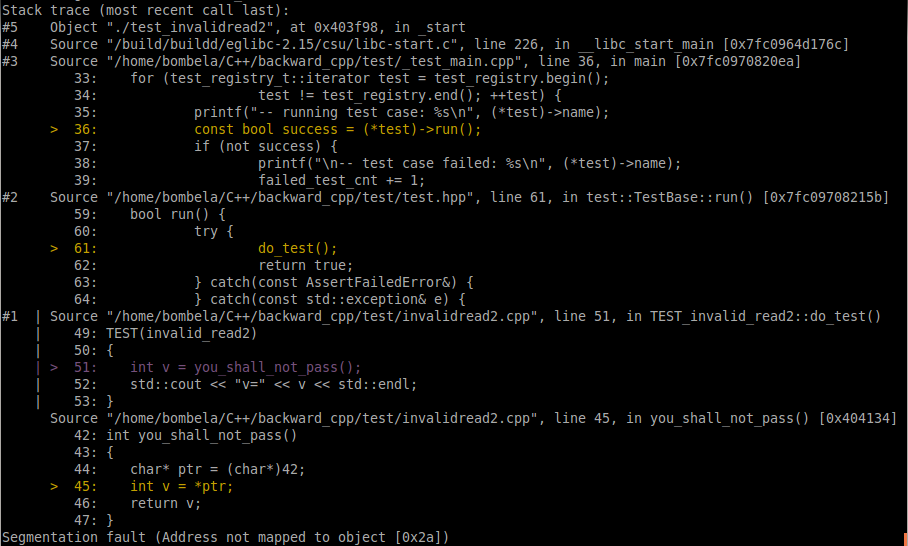
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
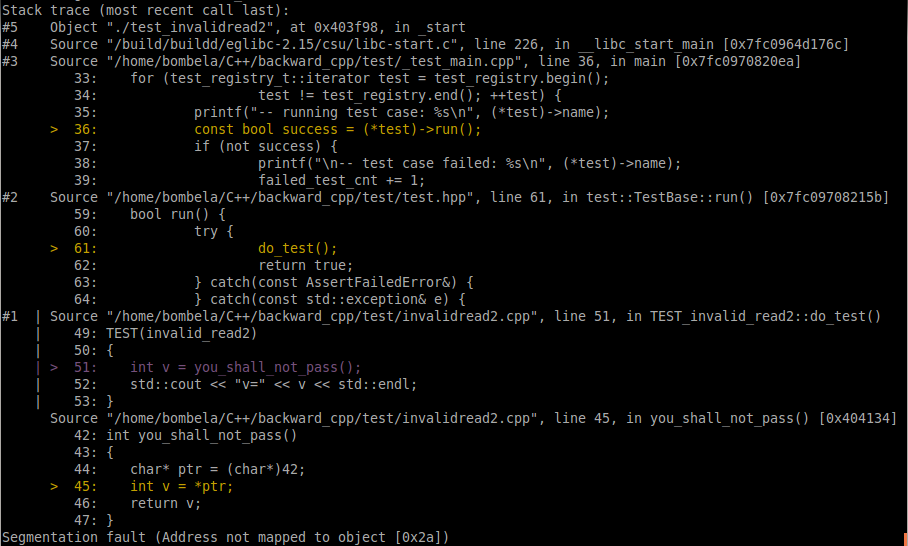
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
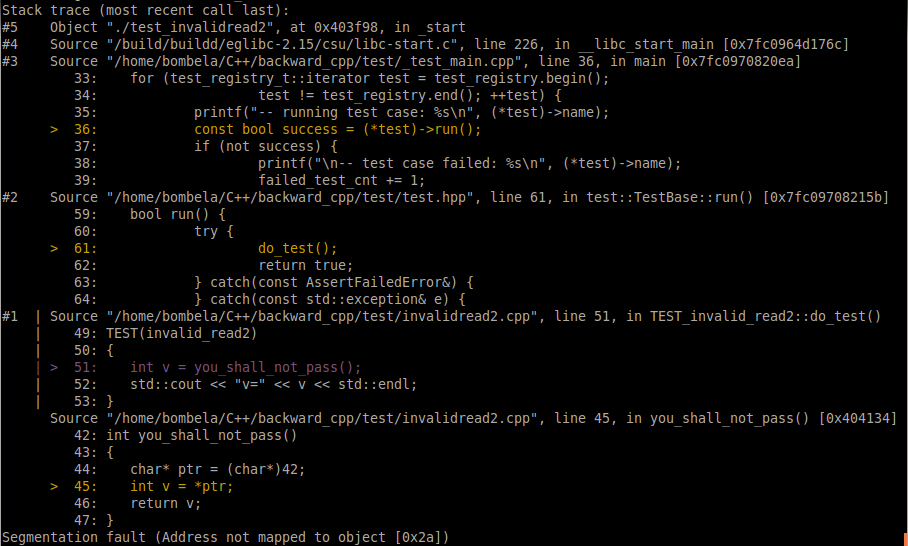
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | foxy-devel |
| Last Updated | 2025-06-25 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 1.0.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS2 packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(backward_ros REQUIRED)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | 0.1.7 |
| Last Updated | 2019-01-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 0.1.7 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(catkin REQUIRED COMPONENTS your_dependencies backward_ros)
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | 0.1.7 |
| Last Updated | 2019-01-11 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 0.1.7 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS packages.
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(catkin REQUIRED COMPONENTS your_dependencies backward_ros)
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this:
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/backward_ros.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2021-07-13 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| backward_ros | 0.1.8 |
README
Backward ROS
For info about the backward-cpp project check https://github.com/bombela/backward-cpp
This wrapper should make it very easy to integrate backward_cpp into your ROS packages.
ROS2
There’s a foxy-devel branch and it has been released to the most recent ROS2 versions
Integration of backward_ros
Add backward_ros to your package.xml <depend>backward_ros</depend>
Add backward_ros to your CMakeLists.txt find_package(catkin REQUIRED COMPONENTS your_dependencies backward_ros)
To get line numbers and more details, you need to build with debug information enabled (CMAKE_BUILD_TYPE = Debug or RelWithDebInfo)
You’re done, it should automatically add a library to your executables, when they crash, they should print a nice stacktrace like this: