
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
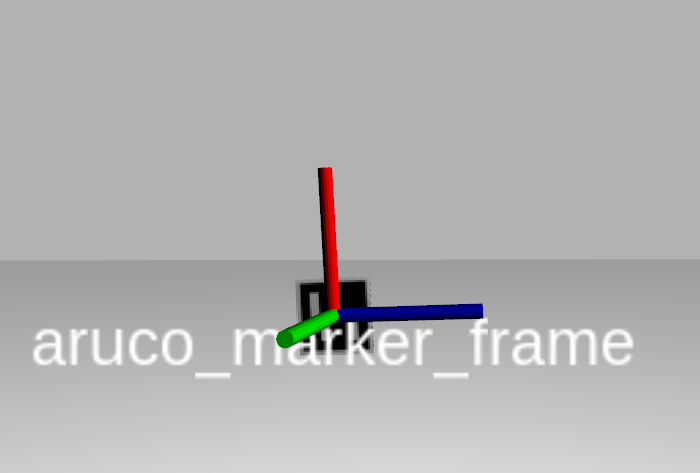
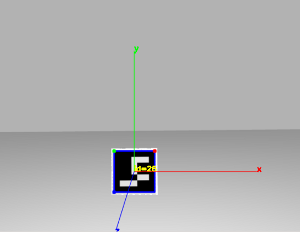
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
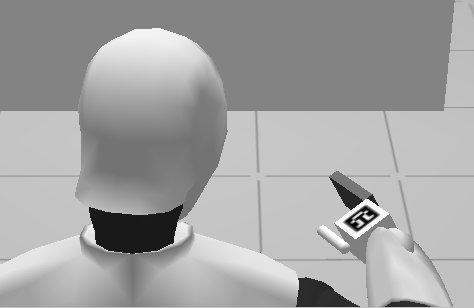
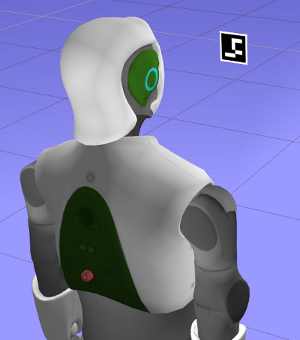
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | humble-devel |
| Last Updated | 2025-04-10 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 5.0.5 |
| aruco_msgs | 5.0.5 |
| aruco_ros | 5.0.5 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2018-02-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 0.2.2 |
| aruco_msgs | 0.2.2 |
| aruco_ros | 0.2.2 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | indigo-devel |
| Last Updated | 2018-02-06 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 0.2.2 |
| aruco_msgs | 0.2.2 |
| aruco_ros | 0.2.2 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2016-10-18 |
| Dev Status | DEVELOPED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 0.0.1 |
| aruco_msgs | 0.0.1 |
| aruco_ros | 0.0.1 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
- High-framerate tracking of AR markers
- Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
- Enhanced precision tracking by using boards of markers
- ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | kinetic-devel |
| Last Updated | 2020-08-28 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 0.2.4 |
| aruco_msgs | 0.2.4 |
| aruco_ros | 0.2.4 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
Generate markers
rosrun aruco optimalmarkers
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | melodic-devel |
| Last Updated | 2023-09-21 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 2.2.3 |
| aruco_msgs | 2.2.3 |
| aruco_ros | 2.2.3 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/pal-robotics/aruco_ros.git |
| VCS Type | git |
| VCS Version | noetic-devel |
| Last Updated | 2023-09-21 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| aruco | 3.1.4 |
| aruco_msgs | 3.1.4 |
| aruco_ros | 3.1.4 |
README
aruco_ros
Software package and ROS wrappers of the Aruco Augmented Reality marker detector library.
Features
-
High-framerate tracking of AR markers
-
Generate AR markers with given size and optimized for minimal perceptive ambiguity (when there are more markers to track)
-
Enhanced precision tracking by using boards of markers
-
ROS wrappers
Applications
- Object pose estimation
- Visual servoing: track object and hand at the same time
ROS API
Messages
-
aruco_ros/Marker.msg
Header header uint32 id geometry_msgs/PoseWithCovariance pose float64 confidence -
aruco_ros/MarkerArray.msg
Header header aruco_ros/Marker[] markers
Kinetic changes
-
Updated the Aruco library to version 3.0.4
-
Changed the coordinate system to match the library’s, the convention is shown in the image below, following rviz conventions, X is red, Y is green and Z is blue.
Test it with REEM
- Open a REEM in simulation with a marker floating in front of the robot. This will start the stereo cameras of the robot too. Since this is only a vision test, there is nothing else in this world apart from the robot and a marker floating in front of it. An extra light source had to be added to compensate for the default darkness.
roslaunch reem_gazebo reem_gazebo.launch world:=floating_marker
- Launch the
image_procnode to get undistorted images from the cameras of the robot.
ROS_NAMESPACE=/stereo/right rosrun image_proc image_proc image_raw:=image
- Start the
singlenode which will start tracking the specified marker and will publish its pose in the camera frame
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right"
the frame in which the pose is refered to can be chosen with the 'ref_frame' argument. The next example forces the marker pose to
be published with respect to the robot base_link frame:
roslaunch aruco_ros single.launch markerId:=26 markerSize:=0.08 eye:="right" ref_frame:=/base_link
- Visualize the result
rosrun image_view image_view image:=/aruco_single/result