
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector

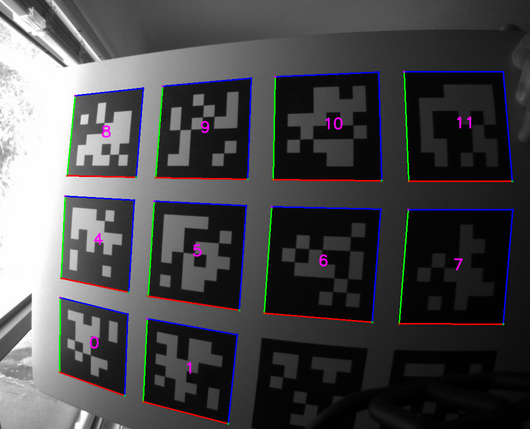
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | iron |
| Last Updated | 2024-05-12 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 2.2.0 |
| apriltag_detector_mit | 2.2.0 |
| apriltag_detector_umich | 2.2.0 |
| apriltag_draw | 2.2.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
- apriltag_detector: base class definitions for plugable detector libraries, launch files for detecting and displaying apriltags. This is the package typically used.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_umich: plugable library and component for detecting Apriltags using the UMich implementation.
- apriltag_mit: plugable library and component for detecting Apriltags using the MIT implementation.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.
CONTRIBUTING
|
|
apriltag_detector repositoryapriltag_detector apriltag_detector_mit apriltag_detector_umich apriltag_draw apriltag_tools |
ROS Distro
|
Repository Summary
| Checkout URI | https://github.com/ros-misc-utilities/apriltag_detector.git |
| VCS Type | git |
| VCS Version | release |
| Last Updated | 2025-12-03 |
| Dev Status | DEVELOPED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| apriltag_detector | 3.1.0 |
| apriltag_detector_mit | 3.1.0 |
| apriltag_detector_umich | 3.1.0 |
| apriltag_draw | 3.1.0 |
| apriltag_tools | 3.1.0 |
README
ROS Apriltag Detector
This repository holds the following ROS2 packages for detecting and displaying Apriltags:
-
apriltag_detector: base class definitions for
plugable detector libraries, node, composable component, and
launch files for detecting and displaying apriltags. This is the package directly accessed by the end user.
The following packages are accessed mostly through the above apriltag_detector package.
- apriltag_draw: components for drawing detected Apriltags onto images.
- apriltag_detector_umich: provides plugin for running the UMich tag detector.
- apriltag_detector_mit: provides plugin for runninng the MIT tag detector.
The software in this repository does strictly perception, no camera pose estimation! It is typically used when no camera calibration is available, or is not needed. If you want perception and camera pose together, use this package, which uses the same tag message format.
Installation
From packages
apt install ros-${ROS_DISTRO}-apriltag-detector ros-${ROS_DISTRO}-apriltag-draw \
ros-${ROS_DISTRO}-apriltag-detector-umich ros-${ROS_DISTRO}-apriltag-detector-mit
From source
The build instructions follow the standard procedure for ROS2. Set the following shell variables:
repo=apriltag_detector
url=https://github.com/ros-misc-utilities/${repo}.git
and follow the ROS2 build instructions here
Make sure to source your workspace’s install/setup.bash afterwards.
License
This software is issued under the Apache License Version 2.0.