
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
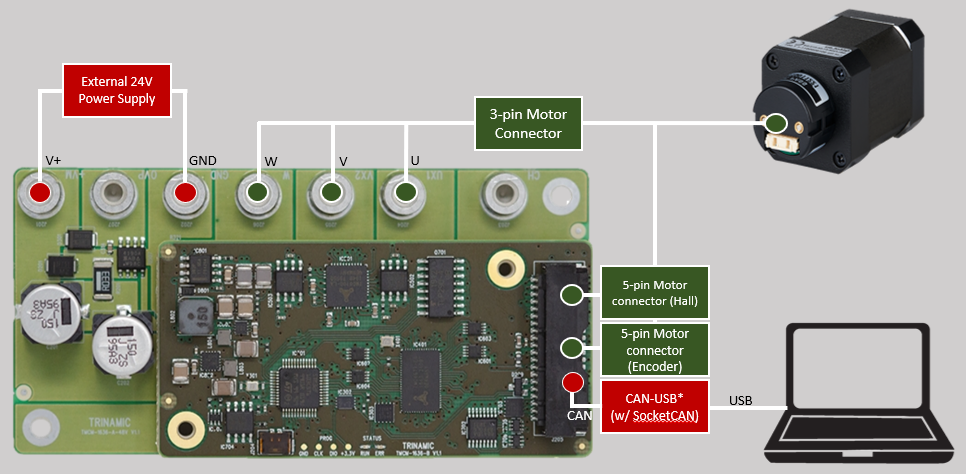
Hardware
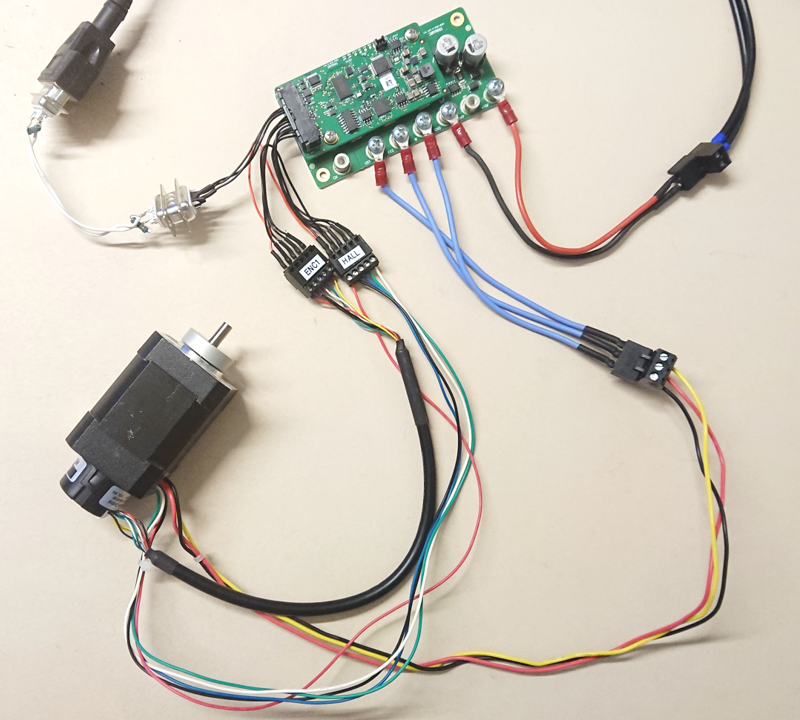
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
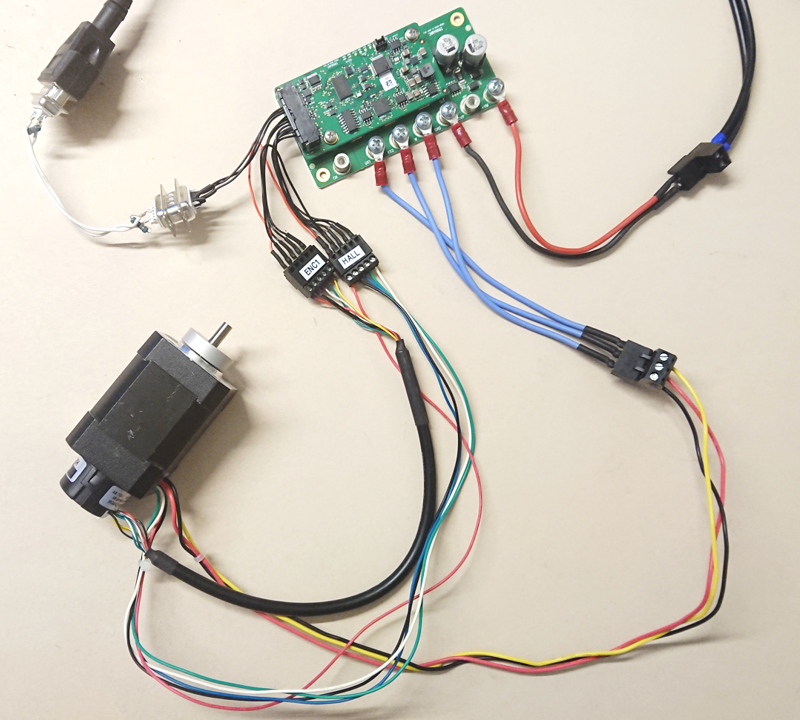
The image below shows the actual setup used (for reference):
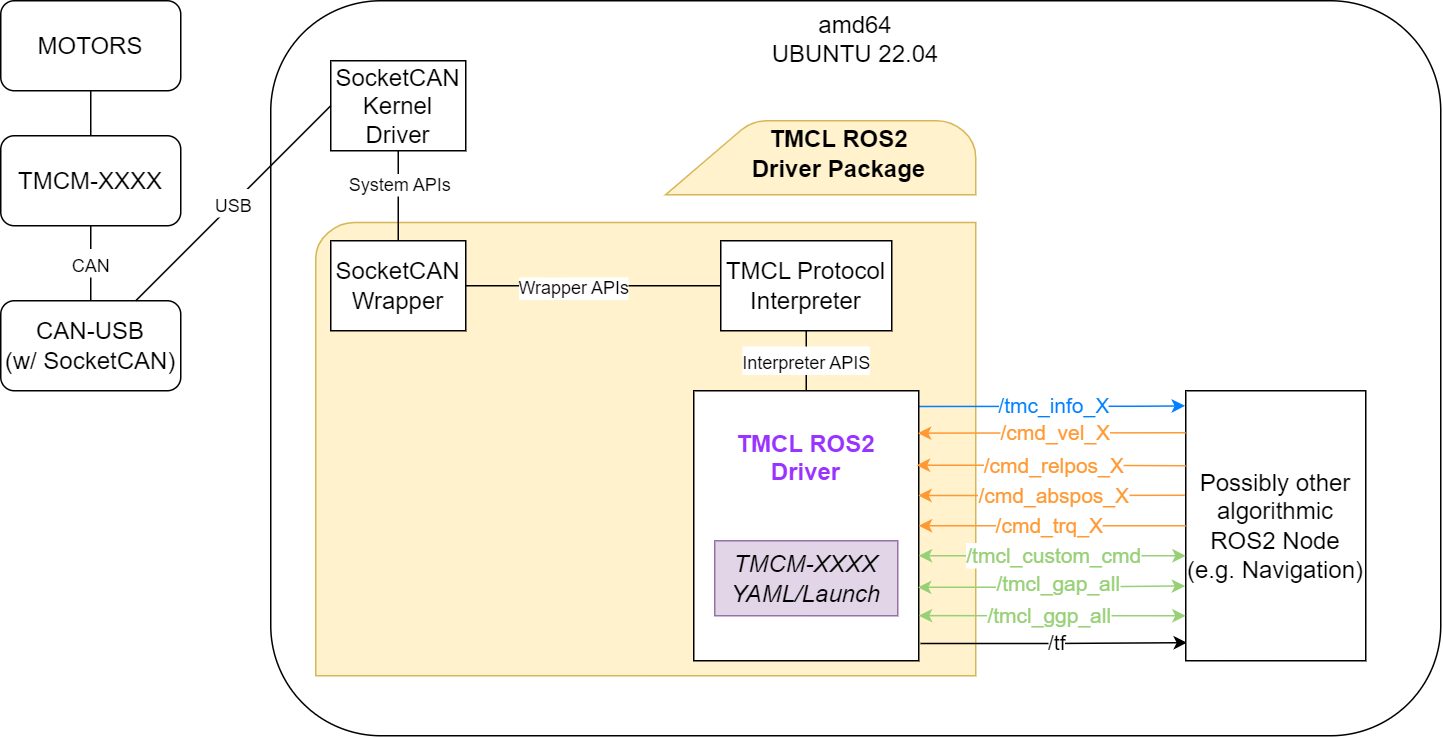
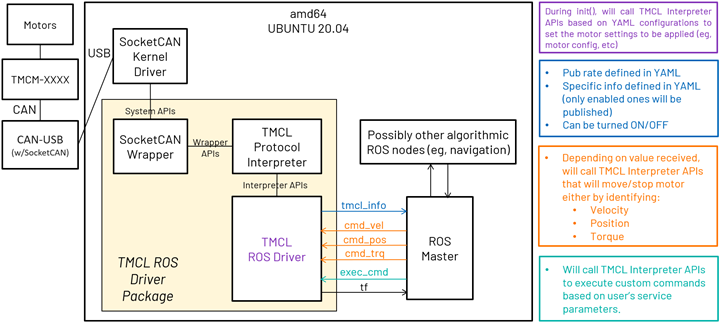
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
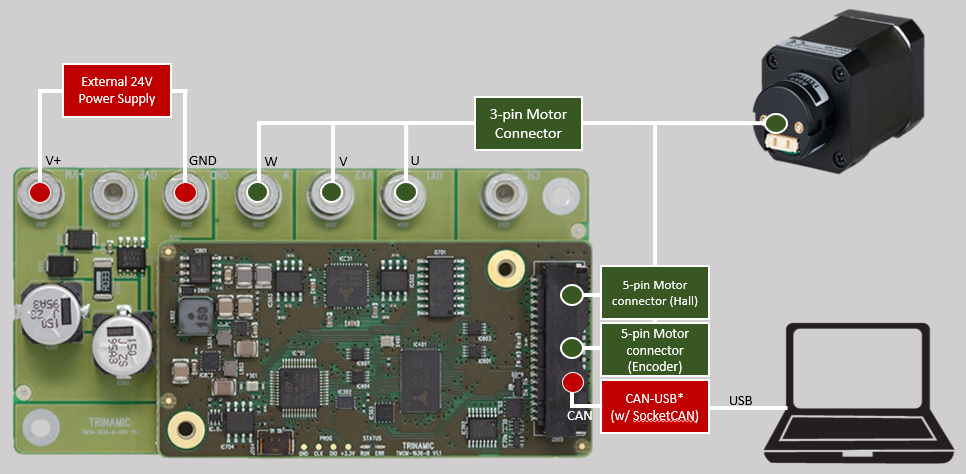
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros2.git |
| VCS Type | git |
| VCS Version | humble |
| Last Updated | 2025-12-17 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 2.1.0 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros2) is the official ROS2 Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-1690 *,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS2 and OS distro: Humble (Ubuntu 22.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*), PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS2 Humble. If not, follow these steps.
- Setup workspace (with workspace folder named as “ros2_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “humble”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/ros2_ws/src
$ git clone <copied SSH o HTTPS link here> adi_tmcl #clones repo to "adi_tmcl" directory name
Build
```bash ########## [TERMINAL 1] ##########
Do proper exports first:
$ source /opt/ros//setup.bash
$ source /opt/ros/humble/setup.bash
Resolve any dependencies
$ cd ~/ros2_ws
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/analogdevicesinc/tmcl_ros.git |
| VCS Type | git |
| VCS Version | noetic |
| Last Updated | 2025-03-27 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| adi_tmcl | 4.0.2 |
README
adi_tmcl
adi_tmcl (previously tmcl_ros) is the official ROS Driver for ADI Trinamic Motor Controllers (TMC) that uses Trinamic Motion Control Language (TMCL) protocol.
Background
- Supported TMC boards:
- TMCM-343,
- TMCM-351,
- TMCM-0930,
- TMCM-1140, PD-1140,
- TMCM-1160, PD-1160,
- TMCM-1180, PD-1180,
- TMCM-1230,
- TMCM-1231,
- TMCM-1240,
- TMCM-1241 *, PD-1241 *,
- TMCM-1260 *, PD-1260 *,
- TMCM-1270, PD-1270,
- TMCM-1276, PD-1276,
- TMCM-1278, PD-1278,
- TMCM-1311,
- TMCM-1316,
- PD-1378,
- TMCM-1617 *,
- TMCM-1633,
- TMCM-1636 *,
- TMCM-1637,
- TMCM-1638,
- PD-1670,
- TMCM-2611 *,
- TMCM-3110,
- TMCM-3212,
- TMCM-3230,
- TMCM-3351,
- TMCM-6110,
- TMCM-6212,
- TMCM-6214 *
- Supported communication interface and interface driver: CAN (SocketCAN)
- Supported ROS and OS distro: Noetic (Ubuntu 20.04)
- Supported platform: Intel x86 64-bit (amd64)
- Supported setup: Single/Multiple TMC in Single/Multiple CAN channel (namespace-managed)
:memo: Note: Tested boards are marked with asterisk(*). PD stands for PanDrive, which combines the motor and the Trinamic board in a single package. TMCM files in this ROS package should also be compatible with the PD version of the hardware. Contact the Developers for any issues encountered.
Hardware
For the tested TMCM-1636 setup, the following are used:
- 1 x TMCM-1636
- 1 x QBL4208-61-04-013 BLDC motor
- 1 x External 24V power supply
- 1 x CAN USB Cable (w/SocketCAN support) - with 120 ohm termination resistors
Also the following:
- PWR/GND from board to external 24V power supply
- 5-pin Motor connector (Hall) (see Note below)
- 5-pin Motor connector (Encoder) (see Note below)
- 40 pin Molex connectors
:memo: Note: Check Section 4 of QBL4208-x-1k Datasheet for motor wiring references.
The image below shows the connection diagram of the setup (with labels):
The image below shows the actual setup used (for reference):
Software
Software Architecture
Software Dependencies
Assumptions before building this package:
- Installed ROS Noetic. If not, follow these steps.
- Setup catkin workspace (with workspace folder named as “catkin_ws”). If not, follow these steps.
Clone
In the website:
- Make sure that the branch dropdown is set to “noetic”.
- Click the “Clone” or “Code” button, then copy the SSH or HTTPS link (eg, “*.git”).
In a terminal, do the following:
$ cd ~/catkin_ws/src
# Clone to directory "adi_tmcl" which is the package name
$ git clone <copied SSH o HTTPS link here> adi_tmcl
Build
Do proper exports first:
$ source /opt/ros/<ROS version>/setup.bash
Where:
- “ROS version” is the user’s actual ROS version
File truncated at 100 lines see the full file