
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
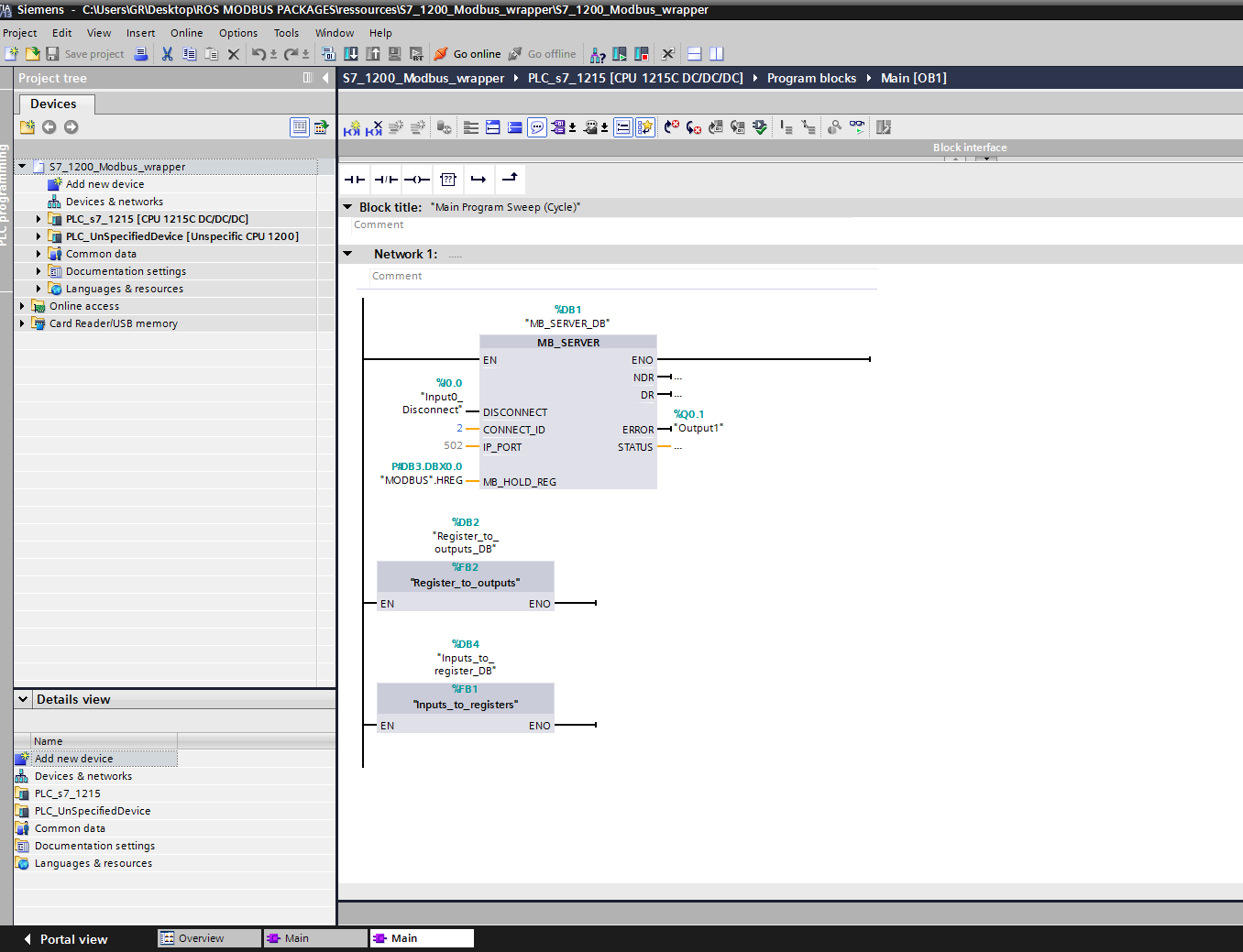
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:

Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.
Launch files
Messages
Services
Plugins
Recent questions tagged modbus_plc_siemens at Robotics Stack Exchange
|
|
modbus_plc_siemens package from modbus repomodbus modbus_cognex_insight modbus_plc_siemens |
ROS Distro
|
Package Summary
| Version | 0.0.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/HumaRobotics/modbus.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2017-06-08 |
| Dev Status | UNMAINTAINED |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Additional Links
Maintainers
- Sven Bock
- Wagdi Ben yaala
Authors
- Sven Bock
modbus plc siemens
This pacakge is a bridge between a python modbus client and a Siemens PLC as modbus server.
This package includes:
- A project test to load in TIA Portal
- A ROS node to interface a Siemens PLC with a ROS environment
Configuration needed
-
This package was tested on Ubuntu 14.04 with ROS Indigo
-
To be completely tested this package needs a second workstation that has a Microsoft Windows (7/8/8.1) environment with Siemens TIA Portal
-
This package was tested with a S7-1200 Siemens PLC on TIA Portal v13
Quickstart
Download the TIA Portal project (in modbus_wrapper/modbus_plc_siemens/resources/[TIA_PORTAL] S7_1200_Modbus_wrapper) to your siemens PLC to enable the modbus server on the PLC.
Make sure you are able to ping the PLC from the workstation, where you execute your ROS node.
Start a modbus client that connects to a modbus server on PLC, running the programm of the resources directory. Replace the ip address with the address from your PLC. Try first if you are able to ping it.
$ rosrun modbus_wrapper modbus_client_s7_1200.py _ip:="192.168.199" _port:=502
You should see the first 6 leds flashing like here:
Contributors
This package was developed by Sven Bock and Wagdi Ben Yaala at Generation Robots/Humarobotics in Bordeaux, France.