
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
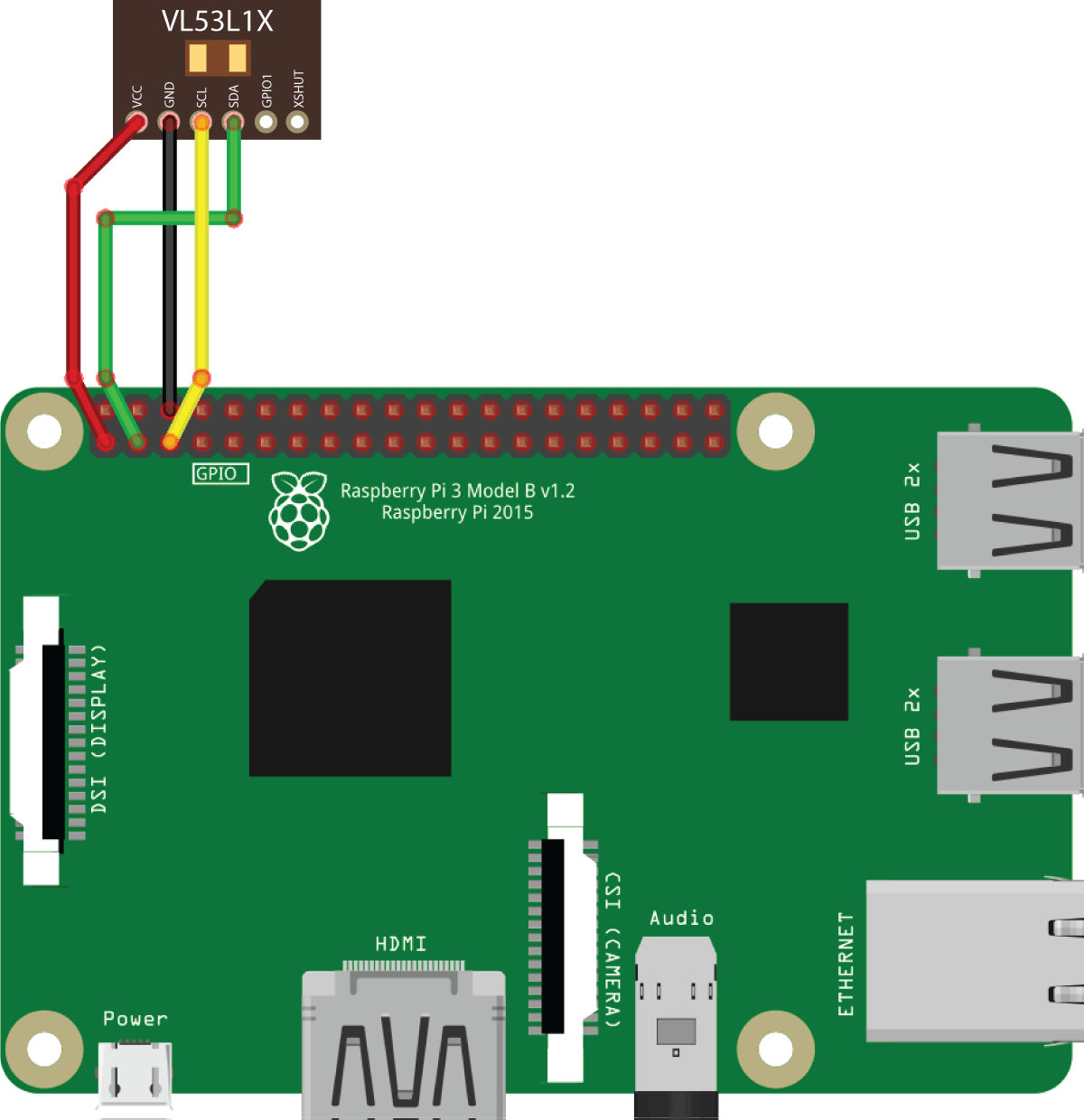
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file
CONTRIBUTING
Repository Summary
| Checkout URI | https://github.com/okalachev/vl53l1x_ros.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-06-12 |
| Dev Status | MAINTAINED |
| Released | RELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Packages
| Name | Version |
|---|---|
| vl53l1x | 1.0.0 |
README
vl53l1x_ros
This is STM VL53L1X time-of-flight rangefinder driver for ROS. Tested on a Raspberry Pi 3 and 4 with CJMCU-531 board.
The code is based on the STM VL53L1X API library.
Connecting
Example of I²C connecting VL53L1X module to Raspberry Pi:
Installation
From package
For Raspberry Pi, there exist prebuilt Debian packages. For installation, get the package (Noetic, Melodic, Kinetic) to the Raspberry and install it with dpkg -i <package-name>.deb.
Manual
- Clone the repository into your Catkin workspace:
cd ~/catkin_ws/src
git clone https://github.com/okalachev/vl53l1x_ros.git
- Build the package:
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="vl53l1x"
Quick start
Run with the default settings:
rosrun vl53l1x vl53l1x_node
See the ranging results:
rostopic echo /vl53l1x/range
See the ranging rate:
rostopic hz /vl53l1x/range
Parameters
All parameters are optional. Check the launch folder for launch-file templates.
-
~i2c_bus(int) – I2C bus number (default: 1). -
~i2c_address(int) – I2C address (default: 0x29). -
~mode(int) – distance mode, 1 = short, 2 = medium, 3 = long (default: 3). -
~timing_budget(double) – timing budget for measurements, s (default: 0.1) -
~poll_rate(double) – polling data rate, Hz (default: 100). -
~ignore_range_status(bool) – ignore validness of measurements (default: false). -
~pass_statuses(array of int) – measurement statuses, that considered valid (default: [0, 6, 11]). -
~min_signal(double) – minimum amplitude of the signal reflected from the target to be considered valid, MCPS (default: 1). -
~max_sigma(double) – maximum standard deviation of the measurement to be considered valid, m (default: 0.015). -
~offset(float) – offset to be automatically added to measurement value, m (default: 0.0). -
~frame_id(string) – frame id for outputRangemessages (default: “”). -
~field_of_view(float) – field of view for outputRangemessages, rad (default: 0.471239). -
~min_range(float) – minimum range for outputRangemessages, m (default: 0.0). -
~max_range(float) – maximum range forRangeoutput messages, m (default: 4.0).
timing_budget is the time VL53L1X uses for ranging. The larger this time, the more accurate is measurement and the larger is maximum distance. Timing budget can be set from 0.02 s up to 1 s.
- 0.02 s is the minimum timing budget and can be used only in Short distance mode.
- 0.033 s is the minimum timing budget which can work for all distance modes.
- 0.14 s is the timing budget which allows the maximum distance of 4 m (in Long distance mode).
The resulting measurement rate is 1 / (timing budget + 0.004) Hz.
Setting ignore_range_status to true makes the node to ignore RangeStatus field of measurements. This may significantly improve maximum distance and rate but affects quality of measurements.
mode is one of three distance modes, with the timing budget of 0.1 s, Short, Medium and Long modes have maximum distances of 136, 290, and 360 cm, respectively.
~min_range and ~max_range don’t affect any device settings and only define min_range and max_range values of the output Range messages.
See the official documentation for more information on mode and timing budget.
Topics
Published
-
~range(sensor_msgs/Range) – resulting measurement. -
~data(vl53l1x/MeasurementData) – additional data of the measurement.
Copyright
Copyright © 2019 Oleg Kalachev.
File truncated at 100 lines see the full file